激光辅助机器视觉测量两平面高度差的设计
2018-05-05潘奕创傅惠南何金彬黄辰阳
潘奕创,傅惠南,彭 赶,何金彬,黄辰阳
0 引言
随着工业自动化的发展,机器视觉广泛应用于工业领域,视觉在工业应用中,多见于产品的缺陷检测,定位,测量领域。而在视觉测量中,它通过光学成像原理获取待测产品的外观,对图像进行处理,计算出空间几何尺寸,位置姿态,三维形状等信息。视觉测量任务对产线上的工件或装配进行测量以确保它们与预置标准量的相符程度,具有非接触,动态响应快,大量程,高效率,全自动等优点[1]。
超声压合手机充电头后两平面的高度差的测量,本文提出一种激光45°辅助照射到产品上,工业相机方向在产品的高度差的垂直方向上,运用等腰三角形原理,测量光线的平行方向的距离即可得到两平面的高度差的方法。
1 视觉测量选型
本文的硬件有德国Balser(acA3800)工业相机,该相机有很高的分辨率及成像能力,HPTL-12.380双远心镜头,放大倍率为0.078。十字激光,图像采集卡,工控机。工业相机和镜头是专门用于工业领域,为适合工程应用要求而设计制造。工业相机与数码相机不同,主要表现:①工业相机的快门时间非常短,可以抓拍快速的物体及其移动轨迹;②工业相机的图像传感器是逐行扫描的,而一般相机的图像传感器是各行扫描的;③工业相机输出的是没有经过图像处理的图像数据,其光谱范围较宽,适用于进行高质量图像算法的机器视觉工程应用[2]。选用远心镜头,由于其具有较大的工作景深,可以保证一定高度范围的被测物成像免于调焦,消除透视变形以及透视变形产生的被测物体遮挡的情况,同时不影响精度[3]。图像采集部分的任务是把目标物体的特征信息进行光学成像,然后通过传感器将光信号转为电信号给工控机的图像数据采集卡。在设计平台上,对手机充电头水平45°十字激光打光如图1所示。

图1 十字激光打光效果图Fig.1 Cross laser light effect drawing
其中面1是压合的上平面,面2是外壳的上表面,即测量这两个平面的高度差信息。
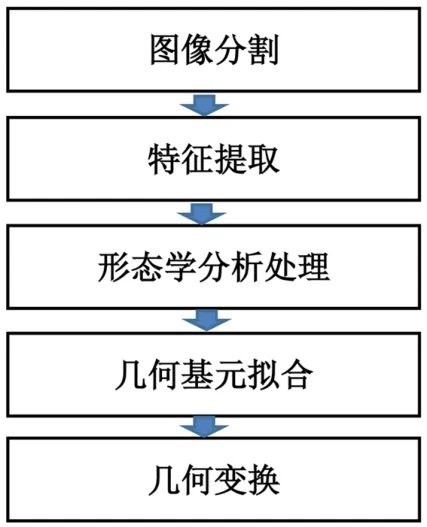
图2 图像测量实施方案Fig.2 Image measurement plan
2 测量原理
图像测量主要是根据采集到的被激光线照射的压合后的手机充电头图像,计算出高度差的两条光线的距离即可得到高度差。图像测量总的实施流程如图2所示。
2.1 图像分割
把要感兴趣区的激光线区域进行图像分割,对图片分割出四个区域,如图3、图4。
对每个区域进行激光线进行处理,分析表明,被分割的激光线和背景之间存在显著的灰度差,阈值分割的定义为:


图3 双远心手机充电头测量平台获取图像Fig.3 Acquired by double-telecentric phone chargers Measuring platform

图4 分割区域图Fig.4 Division plot
阈值的gmin和gmax在系统设置时选定且永远不会被调整,除非激光的强弱重新调整。激光线打在产品表面,存在反射、漫射现象,如图5。

图5 阈值分割图Fig.5 Threshold segmentation
在这种行程表示法描述的区域上计算连通区域,可以使用经典的深度优先搜索[4]。反复搜索第一个未被处理的行程,然后在此行程相邻的上下两行中搜索与此行程交叠的所有行程。判断两行程是否交叠的依据就是连通性的定义。对于4连通,两交叠的行程中必须至少有一个像素位于同列。对于8连通,两行程必须至少对角接触。
2.2 特征提取
图像的特征包括区域区域特征、灰度特征、轮廓特征。简单的区域特征是区域面积:

由此可知,区域的面积a就是区域内的点数 ||R。区域的行程表示法可使区域面积的计算速度快很多,这个特点对几乎所有的区域特征都适用。面积是被称为区域的矩的广义特征中一个特例。p≥0,q≥0时候,矩定义为:

m0,0就是区域的面积,与计算面积类似,因为能够推导出基于行程的简单等式来计算矩,所以使用行程表示法时就可以高效率地计算矩。通常期望有一些特征可不随物体尺寸变化而变化,为获取这样的特征,当p+q≥1时,矩除以区域的面积就得到了归一化的矩:

归一化的矩中推导得到的最令人感兴趣的特征是区域的重心,即(n1,0,n0,1)。它能被用来描述区域的位置,尽管重心是像素精度的数据计算得到,但它是一个亚像素精度特征[5]。也就是最后使用的求重心法。
2.3 形态学分析处理
可以看到分割中经常出现不想要的干扰。而实际分割结果包含这样的一部分,如图4目标和背景交界的斑点。数学形态学被定义为一种分析空间结果的理论[6]。图像形态一般有区域形态学和灰度形态学。腐蚀和膨胀是形态学处理的基础,作为z2中的集合A和B,表示为AΘB的B对A的腐蚀定义为:

B对A的腐蚀是一个用z平移的B包括在A中的所有的点z的集合。AC是A的补集,φ是空集。A⊕B的B对A的膨胀定义为∶

这个公式是以B关于它的原点的映像,并以z对映像进行平移为基础,B是一个结构元,A被膨胀的集合。膨胀会扩大一幅图像,而腐蚀侧会缩小一幅图像中的组成部分。而开运算和闭运算操作中,开运算一般会平滑物体的轮廓,断开较窄的狭颈并消除细的突出物。闭运算同样也会平滑轮廓的一部分,但与开运算操作相反,它通常会弥合较窄的间断和细长的沟壑,消除小的空洞,填补轮廓线中的断裂[7]。这里用开运算处理。公式如下:

B对A的开运算就是B对A的腐蚀,紧接着用B对结果进行膨胀,因为激光需要提取的激光线目标和背景之间,存在大量不均匀的光斑,干扰对激光线的准确提取。为消除对检测激光线的区域的干预。设计B半径为5的圆形结构元。对其进行线腐蚀在膨胀的开运算。效果如图6。

图6 开运算效果图Fig.6 open operation effect diagram
图中轮廓线包围部分是两截取部分两个有高度差的两个面进行开运算后的部分,因为产品的夹具和产品之间有一点的间隙,每次安放的手机充电头位姿有稍微的偏差。在应用中,并不能保证被测物体在图像中总是处于同样的位置和方向。检测算法必须能够应对这种位置的变化。首先要解决的问题就是检测出被测物体的位置和方向。这里主要是角度的偏移影响,对区域进行画最小外接四边形,用外接四边形和外接矩形计算几何变换矩阵。公式为:

像素间距转化为距离单位X轴的系数为0.021,y轴的系数为0.021。经过以上图像处理,得到的测量效果如图7。
图7显示的是经过以上算法测量得到的压合后两平面的取点计算结果,取上边中心为A点,左边中心为B点,下边中心为C点,右边中心为D点。这四个点测量值近似为两平面的高度差信息。
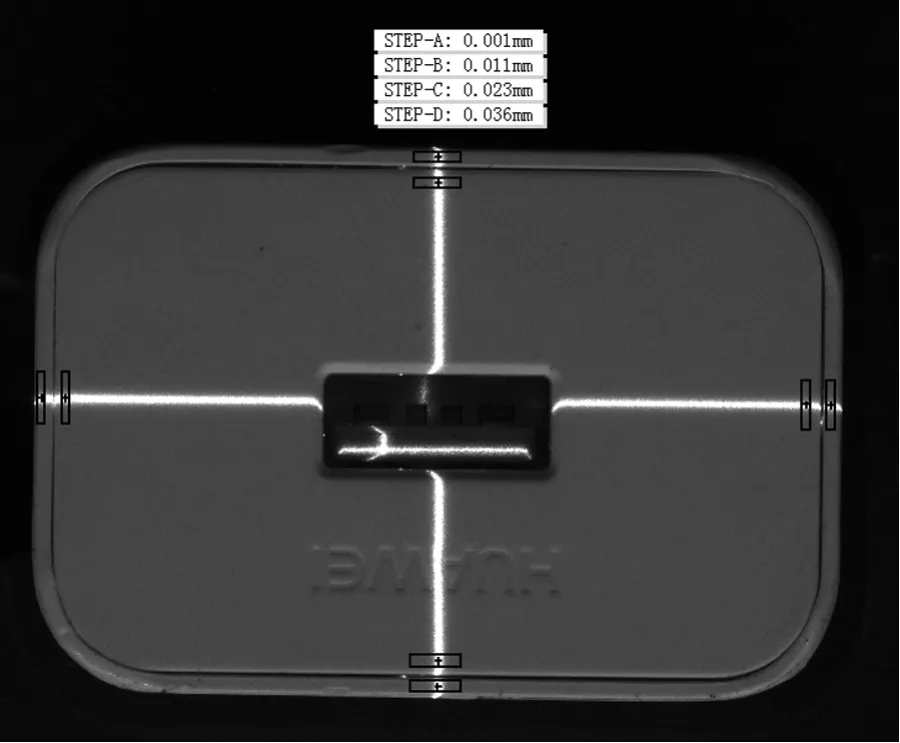
图7 测量效果图Fig.7 Testing picture
3 实验及分析
为验证视觉检测算法符合检测要求,取一个已经用传统方法检测和标记好的样品,高度差A点0.001 mm,B点0.019 mm,C点0.055 mm,D点-0.022 mm。安放样品的夹具3 mm间隙的条件下,进行取下重复安放检测实验,进行20组实验数据进行分析。如图8。

图8 实验数据图Fig.8 Experimental data graph
横坐标表示重复测量的次数,纵坐标表示本方案机器视觉测量每一次测量对应的高度差。与已经标定好的数据对比。测量每次各个点测量的值的波动范围在正负0.02 mm之间。满足测量精度要求。
4 总结
本文针对充电头两个有高度差的平面,设计出一种用十字激光线45°辅助下的机器视觉测量方法。根据等腰三角形两边相等原理,通过算出激光线的两线条的距离得出两平面的高度。研究了激光线的图像,并对目标进行特征提取,图像预处理,为消除目标激光线与背景过度区域斑点的干预。用半径为5的圆形结构元去对目标进行开运算,用处理后的目标区域的重心坐标计算距离。实验结果表明外加激光线辅助的机器视觉测量,而测量的是光源本身,用形态学的开运算处理目标区域,后用区域重心坐标计算,稳定性好。
参考文献:
[1]张广军.视觉测量[M].北京:科学出版社,2008.
[2]毕文波.基于机器视觉的机械零件尺寸识别研究[D].济南:山东大学,2006.
[3] R.SEDGEWICK.Alogrithms in C.AddisionWes-ley[C].Reading.MA.1990.
[4] Carsten Steger, Markus UIrich.Machnie Vision Alog⁃rithms and Applications[M].北京:清华大学出版社,2008.
[5]P.SOILLE.Morphological Image Analysis.SpringerVerlag[M].Berlin,2nd edition.2008.
[6]Radael C.Gonzalez,Richard E.Woods.Digital Image Pro⁃cessing[M].北京:电子工业出版社,2003.
