基于图像检测技术的自动扶梯制动距离检测装置*
2018-05-05黄绍伦
任 馨,黄绍伦,佘 昆
0 前言
自动扶梯与自动人行道的制停距离检测[1-4],一般的做法是采用粉笔作标记[5]、目测起始时刻,卷尺测量距离等传统的人工测量方法。其弊端有两点:一是测量精度差,最主要原因在于认定制停距离起始时刻是通过人为感官配合实现的,同一台自动扶梯会因不同的测试人员出现不同的测试结果,影响检验机构报告的权威性;二是测量的重复性差,由于测试人员按下计时秒表的速度难免会有偏差,同一台自动扶梯或自动人行道即使同一名测试者仍然可能会有不同的测试结果,尤其是处于判定是否合格的边界值时,这种情况更让测试人员无所适从。
为了克服上述弊端,本文设计了一种采用图像检测技术实现的制动距离检测装置,利用电流传感器捕获和识别扶梯的制动触发信号;利用便捷安装于梯级上并随着梯级移动的图像检测传感器采集围裙板金属表面的图像信息,经过内置的DSP处理器对采集的图像进行匹配运算,最终换算成实际制动距离信息,二者均通过无线信号将数据上传至平板电脑,并实时显示测试数据过程和最终结果。
1 图像检测技术的基本原理
被测的围裙板金属平面在运动的过程中,通过快速连续采集一组固定时间间隔的微图像,如果在采集图像时间间隔很短的情况下,其相邻前后两组图像中必然会存在相同的图片信息。这部分相同的图片信息,在图像的位置变化体现了被测围裙板金属平面在该时间间隔内的位移状态[6],即移动方向和移动距离。
具体算法如下。
假设相邻的两幅采集图像为P1、P2,其中P1为比对图,P2为搜索图,从P1的中心位置提取16×16的子集T为模板图。如图1所示,将T叠放在P2上进平移,以求在P2搜索图上最佳匹配T的部分对应的位置。模板图T在P2覆盖下的图像成为P2的子图P2x,y。
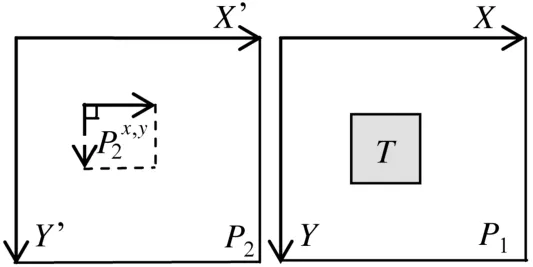
图1 最佳匹配搜索示意图
为了寻找最佳的匹配位置,定义搜索相似度D(x,y)为子图P2x,y与模板图T之间的像素差值的平方和,如公式(1)所示。当D(x,y)的值最小,代表子集与模板之间的差距越小,其相似程度越高,当D(x,y)为“0”时代表图像完全匹配。

其中,P2x,y(i,j)和T(i,j)分别是搜索图P2x,y与模板图T在位置(i,j)处的灰度值,1≤i,j≤16。
所以,求解最佳匹配点的问题可以转化为,遍历所有的(i,j)位置,求出D(x,y)最小值。算法过程如下。
(1)Dm(x,y)定义为最佳匹配点。将x=1,y=1时的D(1,1)设定为初始相似度,即初始化Dm(x,y)=D(1,1)。
(2)从(1,1)位置开始,依次扫描相邻位置的D(x,y),并与 Dm(x,y)比较,若 D(x,y)≤Dm(x,y)则令 Dm(x,y)=D(x,y),该坐标(x,y)替换D0(x,y)的坐标;反之,则忽略并直接进入下一个扫描点继续计算比较。
(3)遍历所有(x,y)后,将得到最佳匹配点Dm(x,y)的坐标(x,y),使它与中心位置相比,即可知道被测扶梯围裙板金属平面在图像平面的x和y方向上的前后两帧图像之间的相对位移。由于图像平面(像素)与物理尺寸存在的比例关系固定,进而可很方便地换算成物理空间的物理位移值。
2 检测装置的总体设计
基于图像检测技术的自动扶梯制动距离检测装置由无线图像检测模块、无线电流传感器模块和平板电脑软件组成。
无线图像检测模块负责实时采集和计算相对位移量,定时传输一组扶梯参数数据包到无线接收模块;无线电流传感器模块用于夹持在制动器的供电线路上,当电梯断开安全回路,制动器失电抱闸开始制停,无线电流传感器获取并分析识别制停信号的真实起始时刻;二者同时无线传送至平板电脑,无线接收模块将接收到的两路数据包通过USB接口与平板电脑进行通信,平板电脑负责对检测数据做进一步的滤波处理和数据分析,得到制停距离、制停加/减速度、梯级速度等数值结果。
3 检测装置的硬件设计
(1)图像检测模块元件选型及设计
图像检测传感器硬件选用PixArt Imaging Inc.公司的PMW3360DM-TDQU传感器,具有12 000 CPI的可编程图像分辨率和12 000 fps的采样率,自带IR-LED红外调制激光发射。配合采用LE19-LSI型PC光学透镜组件接收反射光图像信息,通过四线SPI接口使模块MCU固定时间间隔获得图像数据,进而求出单位时间内的位移量[7]。
(2)电流传感器模块设计
为了现场安装方便,电流传感器采用钳式电磁感应传感器,使用时卡钳在制动器的工作电源线上。根据国标GB 16899的要求,由于制动器必须是失电动作型,因此在制动器抱闸制动前,电流钳能感生电流;制动器抱闸制动时,电源失电,电流钳感生电流丢失,形成信号差。通过I-U转换电路转换成电压信号采集至模块单片机,进而发送信号至平板电脑软件。
(3)无线模块的设计
无线模块采用无线通信采用Nordic的NRF24L01+单片射频收发芯片,工作于2.4~2.5 GHz ISM频段,数据传输速率高达2 Mbit/s,且经过PA射频功率放大,与平板电脑程序实现超过100 m的长距离的数据互传。
4 检测装置的软件设计
(1)制动起始时刻的识别
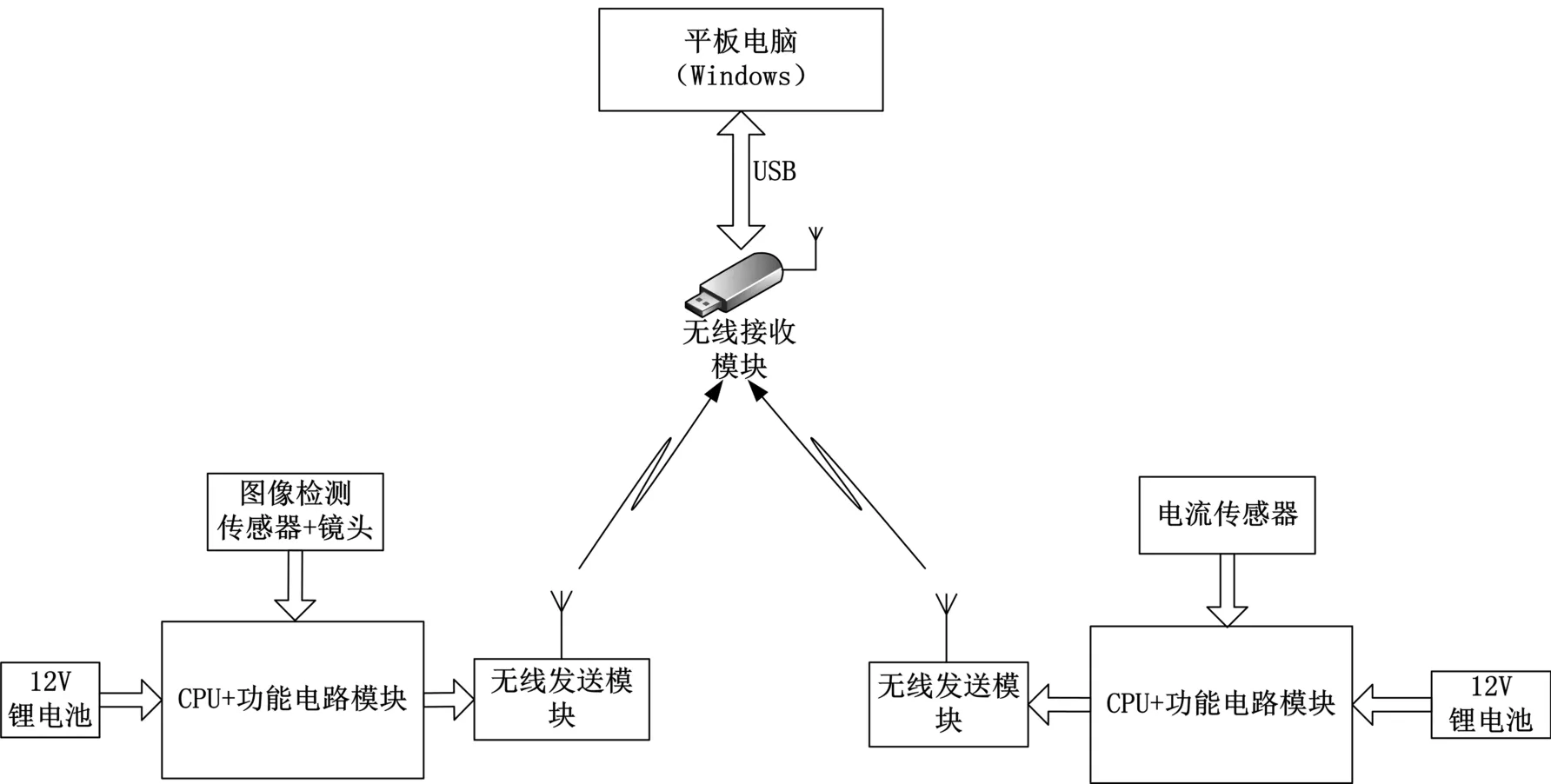
图2 总体设计架构

图3 平板电脑软件界面
当电流钳卡钳在制动器工作电源时,感生电流经过I-U转换电路得到的是50 Hz正弦波Uzd,送至模块AD实现定间隔实时采样。为了更加准确辨识制动器制动起始时刻,减少误判,算法上设计成同时监测Uzd的斜率△Uzd是否大于上一周波的最大斜率值及滑窗均值下降两个条件[8]。
①监测Uzd的斜率△Uzd是否大于上一周波的最大斜率值,计算方法采用式(2):

其中,Uzd代表模块AD的电压值,下标k代表第k个正弦波周期,上标i代表第k个正弦波周期中第i个顺序采样点。
当△Uzd[k](i)>△Uzd[k-1]max时,则记录该采样时刻为疑似抱闸时刻。
②为了应对电压不稳或电压跌落异常事件,采用20 ms的绝对值均值平移滑窗去确认抱闸时刻。计算方法如式(3)所示:

当制动器处于松闸状态,制动器电源保持供电,此时20 ms的滑窗周期内的采样点绝对值累加和趋向于一个确定值,并且必定不等于零。当该值接近或者等于零时,则证明制动器电源失电抱闸。可以确定为一个抱闸事件,并且可以确定原疑似抱闸时刻为真实抱闸时刻。
此时将通过无线信号发送至平板电脑,并且将疑似抱闸时刻和确认抱闸时刻的时刻差作为信息之一传输给平板软件,用于制动距离位移的真实时刻数据对准。
(2)制动距离计算
经过无线图像检测模块,平板电脑可以得到一组与时间相关的微小固定间隔的位移量以及对应的时间戳序列。通过上述制动起始时刻的识别、数据对准和位移求和,即可得到实际的制动距离。
5 试验测试
由于目前尚未有统一的标定扶梯制动距离的测量仪器测量方法,而人工识别和测试扶梯制动距离往往可重复性较差,因此改为从该装置的扶梯梯速测试和制动距离稳定性两方面考察实用性。受测对象为一台0.5 m/s梯速、4.2 m提升高度的自动扶梯。装置设置采用12 000 CPI分辨率、12 000 fps采样速率、20 ms抱闸识别确认滑窗和2 Mbit/s无线传输速率。测量扶梯速度准确度和制动距离稳定性如表1和表2所示。
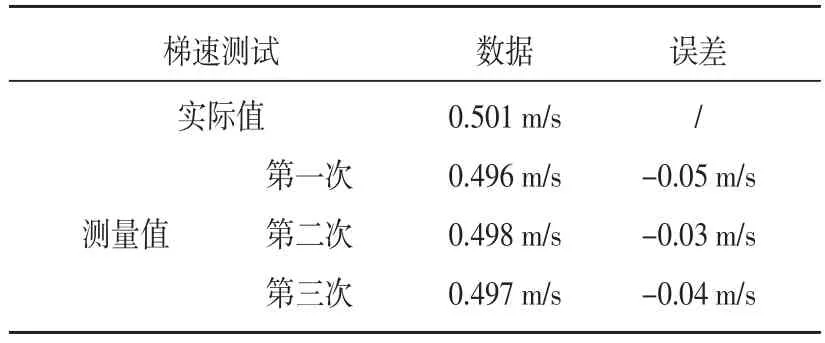
表1 扶梯速度测试结果
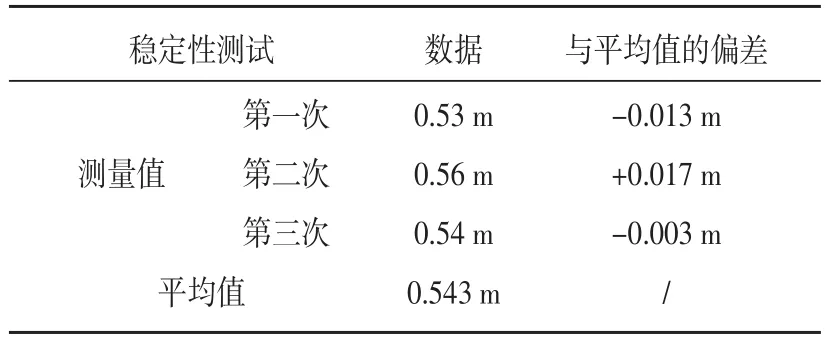
表2 制动距离稳定性测试结果
距离是速度的积分,其误差正比于速度误差。从表1可以看出,对扶梯速度测量中,偏差很小。从表2可以看出,经过该装置测试,同一台自动扶梯的制动距离测试结果稳定性较好。
6 结语
本文设计了一款采用图像检测技术完成自动扶梯的制停距离、梯级速度、加/减速度测量的装置。通过电流传感器模块捕获和识别扶梯的制动触发信号;利用便捷安装于梯级上并随着梯级移动的图像检测模块采集围裙板金属表面的图像信息,最终得到扶梯制动距离参数。整个测量过程操作简单、可信度高、实用性强,为自动扶梯制动距离检测提供了一种新的装置。
参考文献:
[1]GB 16899-2011.自动扶梯和自动人行道的制造与安装安全规范[S].
[2]TSG T7007-2016.电梯型式试验规则[S].
[3]王俊龙,许林.自动扶梯制动安全性能检测研究[J].现代制造技术与装备,2013(04):27-28.
[4]潘相晨.自动扶梯的制停距离[J].中国特种设备安全,2012,28(12):47-48.
[5]张铁军,林峰.一种自动扶梯三参数检测仪[P].中国专利:CN203432811U.2014.
[6]王宁,贾志龙,李莉君.基于光电技术的速度测量方法[J].物理实验,2014,34(03):10-12.
[7]黄辉,傅惠南,库才高.基于光学鼠标传感器的中远距离微位移测量装置的设计[J].机械制造与自动化,2012,41(06):18-20.
[8]冯如鹤,冯密罗,孔金生.基于电流变化率的短路检测保护方法[J].煤矿机械,2008(05):171-173.
