新型软土沉降监测仪的研制*
2018-05-03闫子壮王燕杰
闫子壮,李 青,王燕杰
(中国计量大学机电工程学院,杭州 310018)
土地基由于自身条件的限制,一般路堤载荷条件和施工条件都具有复杂性[1],所以很难对每种处理方法进行严密的理论分析和精确计算[2],因此往往只能通过施工过程中监测和施工完成后的质量检验来保证工程质量[3]。目前大量使用的沉降监测仪器主要还是对地面沉降的监测,是对整个土地基沉降位移总和的监测,例如红外监测、激光监测[4]。但对于具体地下分层沉降的监测方法和仪器还是比较少的。目前也有一些对地下土分层实现监测的仪器,比如沉降仪,沉降仪主要由探测头、指示仪表和测尺等组成[5]。这种测量方法将沉降磁环埋于土中,手动用带有刻度尺的绳索将电磁感应探头沿沉降管往下放,当探头遇到磁环时会发出提示,此时施工人员记录测尺的示数即沉降磁环的位置[6]。两次测得示数差值即为这段时间内的位移沉降。而这种测量方法对分层沉降测量存在能力有限[7]、仪器自动化程度低[8]、可靠性差、数据采集耗时长等问题[9]。
针对目前通用测量方法的缺点和不足,本文提出一种新型测量方法,系统采用多个霍尔器件组成阵列,利用霍尔效应对土沉降实现较高精度实时在线监测。
1 总体方案设计
系统采用多个霍尔器件组成阵列,将霍尔器件固定在沉降管上,沉降管是固定在假设不发生沉降的基岩处,沉降磁环埋于土中。利用土沉降带动磁环沉降,使得霍尔器件与磁环发生相对位移,此时霍尔器件周围的磁感应强度将发生变化,由于霍尔效应的存在,霍尔信号采集器将会输出特定的电信号[10]。利用RS-485总线将所有霍尔信号采集器的数据信号实时上传至霍尔信号汇集器。汇集器对数据进行处理和建模分析并显示,对数据信号还可以实现远程共享,进行实时在线监测。总体方案设计如图1所示。
在实际的应用现场沉降磁环的数量可以按照需要来布置,并不仅仅局限于图1中的3个。沉降磁环分布的越多,对土体内部分层沉降的监测就会越细化。该设计可实现网络化在线监测,大大提高监测效率和质量,改善监测环境,提高监测档次和水平。
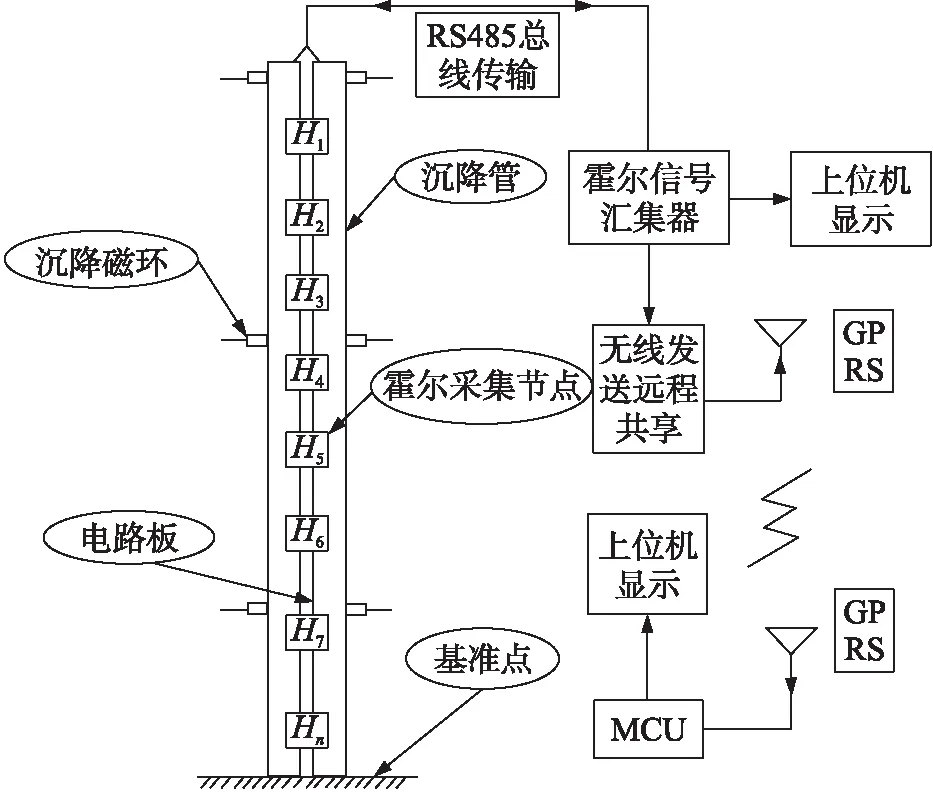
图1 总体方案设计图

图2 传统沉降磁环内部结构图
2 沉降磁环设计
2.1 磁环结构设计
本系统所设计的是一款高精度土沉降在线监测装置,目前施工现场应用的以颗粒状永磁体为核心的沉降磁环是无法满足要求的。图2是目前现场常用的沉降磁环内部图。
这种沉降磁环的结构特点是内部由3个同样的颗粒状永磁体组成正三角形。这种结构的沉降磁环无法做到磁环一周磁感应强度均匀分布。因此就无法准确判断变化的电信号是来源于沉降位移还是相对旋转位移。
针对目前这种沉降磁环的缺点和不足,本系统设计制作了一款新型沉降磁环,图3为新型沉降磁环结构图。

图3 新型沉降磁环
设计加工沉降磁环的材料是钕铁硼,磁环尺寸:内径60 mm、外径75 mm、厚度7.5 mm。这种沉降磁环可以很好的弥补传统沉降磁环磁感应强度分布不均匀的缺点。以磁环中心为原点,任意半径的圆上,磁感应强度的大小是相同的。将霍尔传感器放于沉降磁环内部固定位置,沉降磁环和沉降管之间只发生旋转位移时,霍尔传感器输出信号是不会变化的[11]。只有当二者发生相对沉降位移时,霍尔信号才会发生变化。
2.2 沉降磁环磁感应强度仿真
系统按照加工沉降磁环的尺寸大小、材料以及磁性强度,利用仿真软件ANSYS对磁环周围磁感应强度进行仿真,仿真结果如图4所示。
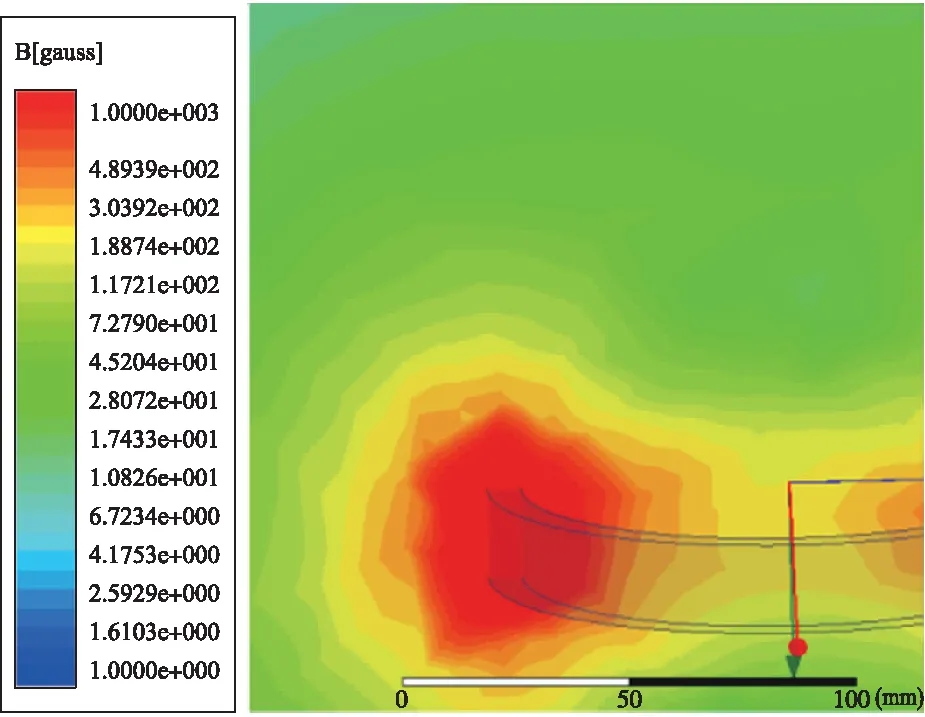
图4 ANSYS软件仿真设计图
从仿真结果可以看出,在磁环正上方的100 mm内磁感应强度变化是比较明显的。而且可以得出,在80 mm以内单从磁感应强度大小变化梯度来看,变化梯度Bo最小可以达到10 gauss以上。
3 土体分层沉降信号采集器设计
3.1 信号采集器设计
信号采集器主要是对霍尔信号进行采集和传送。系统利用控制器内部A/D采样端口对霍尔器件输出的电信号进行采样。运用RS-485总线方式将信号数据上传至汇集器进行处理。图5是霍尔信号采集器的设计框图。
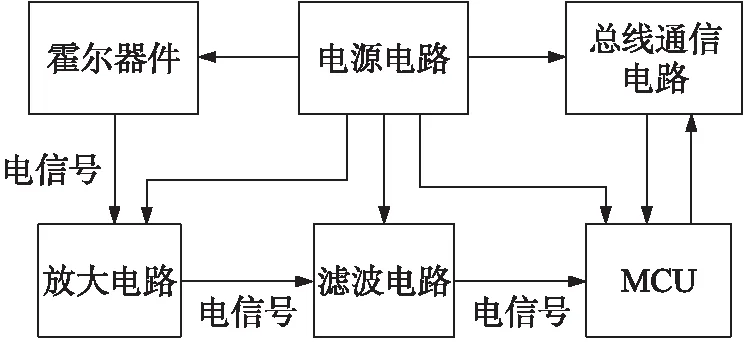
图5 信号采集器设计框图
霍尔信号采集器主要包括霍尔器件模块、信号放大电路、信号滤波电路、控制器、总线通信电路以及供电电源等电路,最终实现对霍尔信号的实时采集和上传。
3.2 霍尔传感器
系统选用SS4951霍尔传感器进行信号的获取。SS4951是一款低功耗传感器,通常在5 VDC供电时供电电流仅为7 mA,具有精确的灵敏度和温度补偿功能。它还具有体积小、操作简单、性价比高等特点。如图6给出SS4951输出信号与电磁感应强度的关系图。
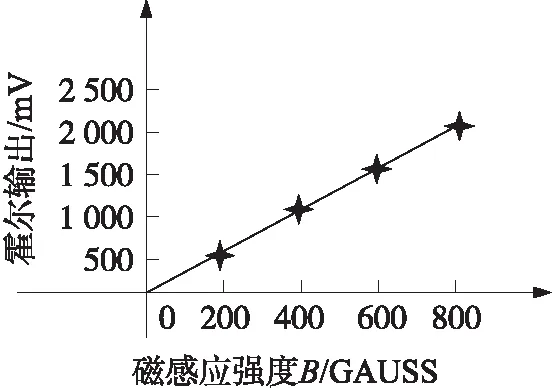
图6 SS4951输出特性图
由图6中SS4951输出信号与磁感应强度的关系可以得出式(1):
U=2.5B
(1)
式中:U是输出电压,B是磁感应强度。
通过式(1)可以看出霍尔输出信号随着磁感应强度的增强而不断增加。通过这个特性便可以对霍尔器件周围磁感应强度进行测量,从而实现对沉降磁环沉降位移的精确监测。
在沉降磁环磁感应强度仿真设计部分已经得出在磁环附近80 mm范围内,变化梯度Bo最小可以达到10 gauss。因此将最小变化梯度Bo代入式(1)中便可得出霍尔传感器输出信号最小变化梯度U0可以达到25 mV。而从这个仿真结果中可以看出,最小变化梯度是不大于10 mm的,因此在沉降磁环附近80 mm范围内每变化1 mm,对应霍尔传感器可以达到2.5 mV大小的变化输出。系统设计采用12位A/D对数据进行采样,12位即4 096个转换单位[12],采样信号是0~3 300 mV,因此采样分辨率可以达到0.806 mV。所以完全可以满足对于2.5 mV的单位采样。
综合沉降磁环的设计、ANSYS仿真结果以及采样分辨率这三者,从理论上可以得出这种设计可实现对土体沉降进行1 mm精度测量。
4 土体分层沉降信号汇集器设计
4.1 汇集器硬件设计
汇集器主要实现采集器数据的汇总和加工处理,主要硬件包括处理器电路、总线通信电路、电源电路以及显示模块。图7为汇集器硬件设计的总体框图。
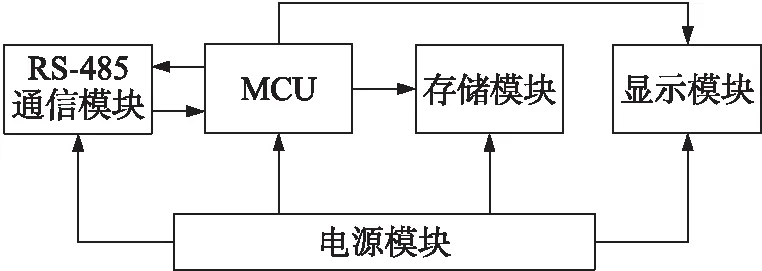
图7 汇集器硬件设计框图
在霍尔信号汇集器设计中,RS-485通信模块用来实现汇集器与采集器之间的通信功能,存储模块用来存储采集器采集信号,显示模块主要是对整个监测系统的监测结果进行显示,显示参数主要包括所有采集器的电信号、沉降磁环初始位置、沉降磁环实时定位、沉降磁环的沉降位移量、系统供电电压和电流、环境温湿度等。电源模块主要是3.3 V、5.0 V给系统进行供电。
4.2 汇集器软件设计
信号汇集器的软件设计是采用可移植性很高的C语言来实现的[13]。软件思想主要是采取一问一答的主从通信方式,主机给特定从机发送命令,对应从机接收命令之后返回采集数据,主机再次发送数据采集命令,依次获取采集器的有效数据并进行数据处理,最后控制显示模块进行显示和远程数据共享,图8为系统程序设计流程图。
4.3 汇集器数据处理
首先是搭建实验数据测试平台。测试平台是以固定沉降管和采集器为基础,用电机带动沉降磁环的移动来模拟土沉降。图9为实验测试平台示意图。
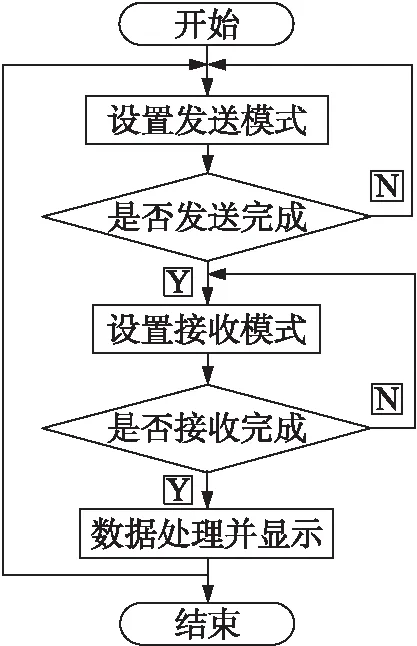
图8 系统主机程序流程图

图9 实验测试平台示意图
测试方案是首先固定霍尔信号采集器节点,将相邻节点之间的距离固定在8 cm,控制电机使沉降磁环从0开始沿x方向往下发生沉降,分别记录沉降到100 cm处的实验数据。图10为采集器1和采集器2节点的采集数据。

图10 实验测试采集数据图
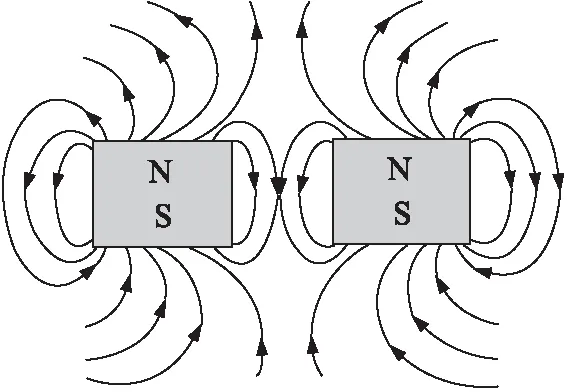
图11 磁环磁力线示意图
从实验数据来看,沉降位移在0~8 cm区间段不断沉降时,采集器1输出是不断增加的,之后采集器1输出会有一个到0 mV的突变过程。随后采集器1输出信号上升到峰值,接着会有一个随沉降位移增加而输出信号不断减小的过程。
图11为设计制作沉降磁环的磁力线示意图。
在磁环沉降的过程当中,输出信号突变是因为沉降磁环是一个具有一定尺寸的环形圆柱而不是一个永磁体点。由图11可以看出,在正中心位置上下10 mm范围内,有一部分磁场强度为负方向,所以会出现霍尔信号为0 mV的突变现象。其实不是0 mV,是负值,但处理器的AD采样是直接把负值当做0 mV来处理的。这个实验结果曲线和理论上是一致的。
为减小实验过程中的实验误差,现选取第1个采集器的前8个有效数据进行拟合利用,当沉降磁环沉降到8 cm以后立即选取第2个采集器的实验数据进行利用,对于第2个采集器的前8个实验数据直接舍弃不用,这样可以大大提高监测精度。图12为给出选取的有效数据汇总。

图12 有效测试数据图
在图12的有效数据中可以发现,利用两个采集器的有效数据进行曲线拟合可以实现对沉降位移在0~16 cm内的精确监测。以此类推利用第3个第4个等多个采集器便可以实现对更大范围内的位移沉降进行精确监测。
从有效实验测试数据走势可以看出霍尔输出信号是随着沉降位移不断变化的,并且实验数据是具有一定数学关系的,选取此段数据进行模型的建立。为进一步减小实验模型误差,现采用分段分别进行数学模型建立的方法。在曲线拟合中,常用的拟合方法有解析表达式逼近离散数据的方法和最小二乘法,系统采用最小二乘法进行曲线拟合[14]。从而实现对沉降位移的精确监测。
5 测试与结果分析
首先在实验中分别做出了单个沉降磁环沉降位移在0、100 mm、200 mm、300 mm、400 mm、500 mm、600 mm、700 mm、800 mm、900 mm、1 000 mm处的测量值和实际值的对比结果,并且分别给出了每组实验数据误差,如表1给出实验测试结果。
通过表1实验数据可以得出实验结果较为稳定,实验误差较小,最大误差绝对值为1.119 1 mm。虽然测试误差没有达到1 mm,但是这个实验测试结果与理论指导测量精度可以达到1 mm的结论是相吻合的。

表1 单个磁环定位测试结果 mm
在测试完成单个沉降磁环定位实验的基础之上,进行多个沉降磁环的定位测试实验。在这里是对3个沉降磁环进行测试实验。表2给出测试结果。

表2 多个磁环定位测试结果
通过实验测试数据分析,基于霍尔效应的土体分层沉降监测仪可以实现对土沉降进行较高精度的测量,对于多个沉降磁环定位实验,测试误差绝对值最大为1.254 4 mm。实验结果表明该研究设计新型沉降测量仪可以实现对土沉降进行较高精度在线实时监测。
6 结论
本系统设计并实现了一种新型基于霍尔效应的土沉降监测仪。利用霍尔效应原理来实现对沉降磁环的精确定位。提出了一种新型的测量方法,结果显示这种监测方法监测精度可以达到1.254 4 mm、其数据稳定性好,可以实现多点实时在线监测,从而实现对土沉降的智能化高精度监测。这种新型监测方法对于摆脱目前单一机械式测量方法具有一定的推动意义,而且大大提升了对土沉降监测的档次。在设计中可结合当前远程传输技术实现数据远程共享,具有更加广泛的应用前景。
参考文献:
[1] 王海波. 软土路基沉降机理及沉降预测研究[D]. 西安:西安建筑科技大学,2009.
[2] 王霞. 软土地基处理及监测技术研究[J]. 河南科技,2016(13):117-119.
[3] 张建伟. 软土路基常见处治方法及沉降动态监测分析[J]. 科技视界,2015(28):289-303.
[4] 李长山. 中山市地质灾害监测预警信息系统应用[J]. 环境与发展,2017,29(8):159-160.
[5] 张本东,汪祖民. 高速公路软土地基沉降变形监测分析与预报[J]. 海洋测绘,2005(1):36-39.
[6] 张文卓. 软土地基沉降监测仪的研究[D]. 中国计量科学研究院,2006.
[7] 姜道旭. 非饱和软土路基沉降计算研究[D]. 重庆:重庆大学,2016.
[8] 顾帮全. 道路软基沉降计算与观测的问题分析及新型观测设备的研发[D]. 青岛:青岛理工大学,2011.
[9] 沈兴春. 公路软土地基沉降分析与监测研究[J]. 江苏科技信息,2016(13):56-57.
[10] 赵浩.一种基于霍尔效应的无刷式测速发电机[J]. 传感技术学报,2017,30(3):467-470.
[11] 赵浩. 一种基于霍尔效应的扭矩传感器[J]. 传感技术学报,2016,29(10):1505-1508.
[12] Kawahito Shoji. A/D Converters for High-Definition High-Speed Image Sensors[J]. ITE Technical Report,2013,37(01):37-40.
[13] Liu Chunfang,Sun Yibiao,Wang Limei. C Language Animation Design Teaching Methods Analysis for Engineering Applications[J]. Advanced Materials Research,2014(2):889-891.
[14] 田垅,刘宗田. 最小二乘法分段直线拟合[J]. 计算机科学,2012(S1):482-484.
