变质量-负刚度动力吸振器试验研究
2018-05-03郑大胜丁志雨姚红良
刘 刚 郑大胜 丁志雨 姚红良
东北大学机械工程与自动化学院,沈阳,110819
0 引言
动力吸振是振动抑制的典型方法,利用动力吸振器可以“吸收”主系统的振动,其力学原理是通过相对运动产生惯性力作用在主系统上,从而抑制主系统振动。传统的动力吸振器有效频率范围较窄,不适合于激励频率经常变化的工况。为克服这一缺点,研究者研发了各种频率可调的动力吸振器[1]。
改变吸振器的连接刚度是改变吸振器固有频率的主要方法,一般采用智能材料或者可变结构来实现,例如文献[2-3]采用磁流变弹性体、文献[4]采用磁流变液、文献[5]通过改变连接梁截面矩来调节刚度等。改变吸振器的质量是另外一种主要方法,人们研究了各种变质量吸振器。文献[6]针对两自由度系统提出了惯性可变的动力吸振器;文献[7]提出了变质量的颗粒阻尼吸振器,并研究了其宽频减振性能;文献[8]通过微型泵控制悬臂梁型吸振器的质量,能够使吸振器前两阶固有频率的可调范围达到38%和35%。
频率可调动力吸振器设计的一个难点是低频段的频率调节性能的保证。采用刚度改变的方式,一般需要较低的连接刚度,这可能导致吸振器在重力作用下变形较大[9];采用质量改变的方式,需要的质量很大,这样又增加了吸振器的体积。为此,本文提出在变质量动力吸振器的基础上增加负刚度机构,形成变质量-负刚度动力吸振器,从而可以使吸振器具有较好的低频有效性。
1 负刚度变质量动力吸振器原理
1.1 传统变质量动力吸振器
传统的变质量动力吸振器动力学模型如图1所示。列振动微分方程如下:
(1)
式中,m1、m2分别为主系统和吸振器的质量;m′为吸振器的可调质量;k1、k2分别为主系统和吸振器的刚度;x1、x2分别为主系统和吸振器的振动位移;F1、ω分别为外激励的幅值和频率。
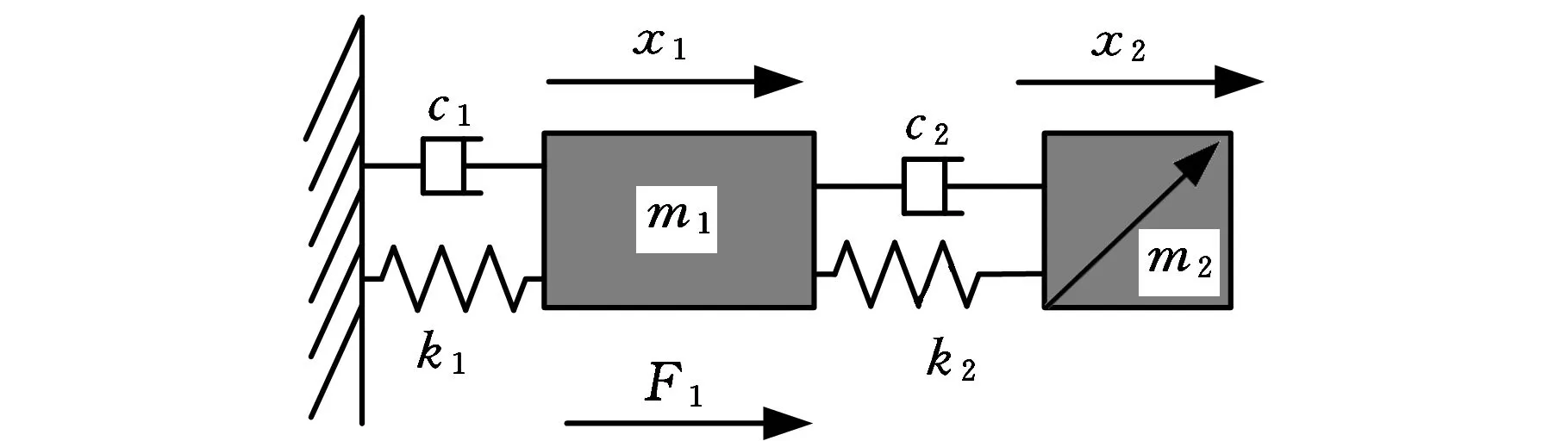
图1 传统变质量动力吸振器Fig.1 Traditional variable mass dynamic vibration absorber
当阻尼可以忽略时,由式(1)可知,当
(2)
时,主系统的振幅为0。因此,在激励频率发生变化时,只要相应地改变可调质量m′使其满足式(2),即可达到最佳抑振效果。但是,当激励频率较低时,需要很大的可调质量才能达到效果,这会带来成本问题、空间安放问题等很多问题。
1.2 变质量-负刚度动力吸振器
为解决上述问题,本文提出在变质量吸振器的基础上增加负刚度机构,使之成为变质量-负刚度动力吸振器。具体方法是在图1的基础上增加负刚度,形成图2所示系统,其中k3是增加的负刚度,c3是增加的阻尼。
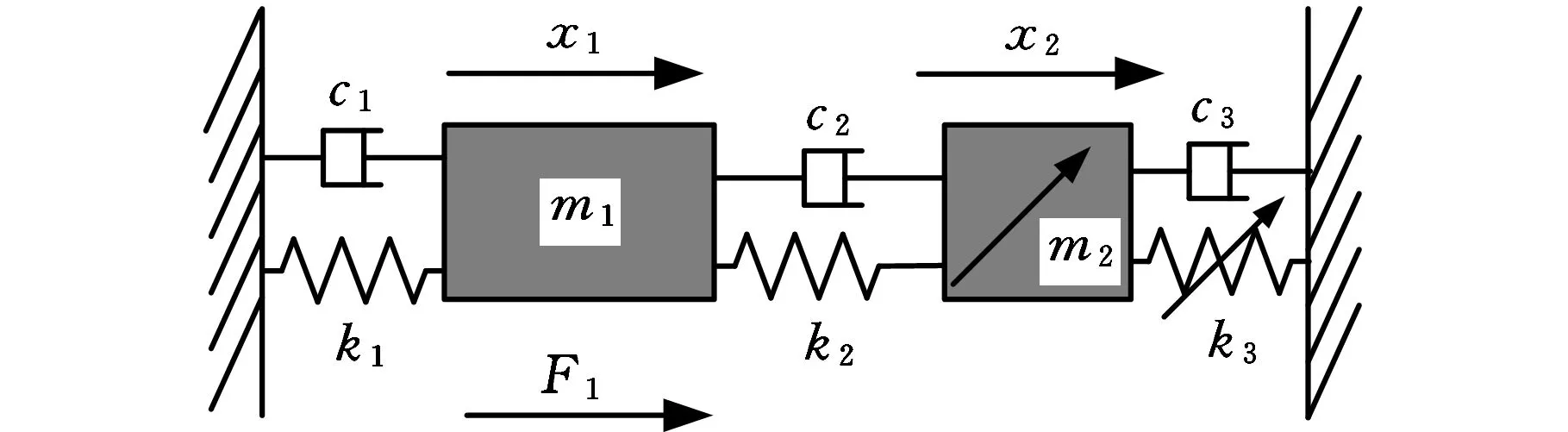
图2 变质量-负刚度动力吸振器动力学模型Fig.2 Dynamic model of the variable mass negative stiffness vibration absorber
图2所示系统的振动微分方程如下:
(3)
当阻尼可以忽略时,由式(3)可得主系统和吸振器的振幅分别为
(4)
因此,当k2+k3-(m2+m′)ω2=0时,有
(5)
很明显,当k3为负值时,ω可以取很小值。
2 悬臂梁式变质量-负刚度吸振器结构及负刚度实现方法
悬臂梁式变质量-负刚度吸振器具体的结构如图3所示,由刚度为k1的悬臂梁和质量块m1组成主系统,由刚度为k2的悬臂梁和质量块m2、刚度为k3的负刚度机构组成吸振器。

图3 变质量-负刚度动力吸振器Fig.3 The variable mass negative stiffness vibration absorber
负刚度机构由矩形永久磁铁产生,其结构如图4所示,详细原理见文献[9]。这里仅做简单介绍:该结构中外磁铁与地相连,内磁铁与吸振器相连,内外磁铁磁极相反,因此内外磁铁之间形成相斥力,该相斥力可以形成负刚度,而刚度的大小与磁铁距离h有关系。该负刚度具有一定的非线性,可以用多项式拟合来描述其非线性关系:
k3=km1+km2x2
(6)
式中,km1为线性刚度系数;km2为非线性刚度系数。

图4 负刚度机构原理图Fig.4 Structure of the magnetic spring with negative stiffness
当取内外磁铁的尺寸为20 mm×40 mm×5 mm,选用NdFeB永久磁铁(剩余磁感应强度Br=1.34 T)组成负刚度机构,且h为20 mm时,km1=-2.397×103N/m,km2=0.024 N/mm3。可以看出km2很小,因此可以仅考虑线性刚度km1,即k3=km1。
3 数值仿真分析
3.1 参数取值
为了分析变质量、负刚度动力吸振器减振性能,对图2所示系统进行动力学仿真,所选取的参数如表1所示。
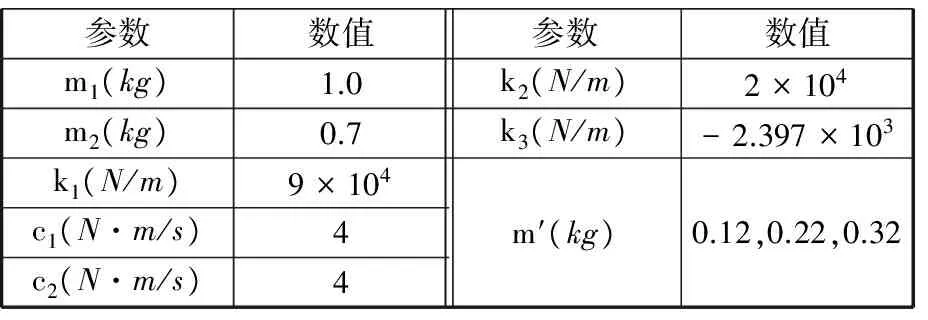
表1 仿真参数
3.2 仿真结果
通过MATLAB数值仿真来求解主系统的振动响应,采用增量谐波平衡法分析主系统的稳态响应。先对无负刚度情况进行分析,吸振器可变质量取不同值,即m′为0.12 kg、0.22 kg、0.32 kg时,主系统的振动频率响应如图5a所示。再对有负刚度情况进行分析,当m′为0.12 kg、0.22 kg、0.32 kg时,主系统的振动频率响应如图5b所示。

(a)未加负刚度
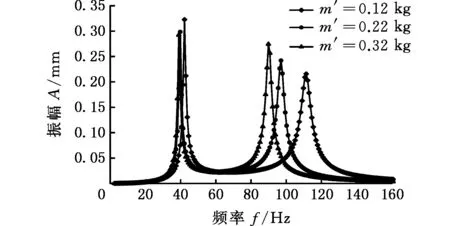
(b)加负刚度图5 主系统振动频率响应Fig.5 Frequency response of primary vibration system
由图5可以看出,增大吸振器可调质量m′,主系统的前两阶固有频率向左移动,即固有频率变小,减振效果明显。加了负刚度后,主系统的前两阶固有频率向左移动更明显,即减振效果更好。
4 试验
4.1 试验台结构及控制系统简介
为了研究变质量-负刚度动力吸振器的实际减振性能,搭建了试验系统如图6所示。试验系统由激振器、加速度传感器、主系统和吸振器四部分组成。其中激振器采用B&K公司生产的电磁激振器,通过信号发生器、功率放大器进行驱动;由刚度为k1的悬臂梁和质量块m1组成主系统,由刚度为k2的悬臂梁、质量块m2、刚度为k3的负刚度机构组成吸振器。一个加速度传感器置于主悬臂梁上,用来采集主系统振动信号。另一个加速度传感器用来采集吸振器悬臂梁的振动信号。
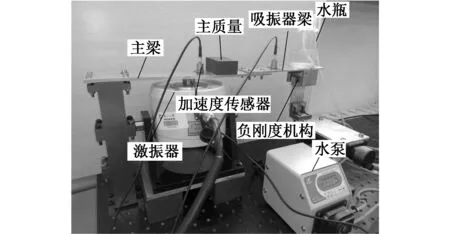
图6 变质量-负刚度吸振器试验台Fig.6 The variable mass negative stiffness absorber test bed
这里用水作为变质量介质,通过水泵向玻璃瓶中抽水来改变玻璃瓶中的水量,从而改变吸振器质量。
水泵的PID控制部分主要由PC机、CompactRIO系列控制卡、水泵、变质量-负刚度机构等组成。其中PC机用于显示和存储数据;CompactRIO系列控制卡通过程序编写实现数据采集、PID控制过程运算并且输出信号控制水泵;水泵通过软橡胶管向固定在悬臂梁上的玻璃瓶里面增减水,从而控制悬臂梁的振幅。
4.2 变质量-负刚度试验验证
首先,进行激振频率为20~160 Hz的扫频试验,测得吸振器玻璃瓶空、玻璃瓶加半瓶水和玻璃瓶加满瓶水三种状态下的幅频特性曲线,如图7、图8所示。从图中可以看出,随着水的质量的增大,该系统的前两阶固有频率向左移动,即固有频率变小,减振效果明显,验证了通过调整吸振器质量以跟踪外界激振力频率的方法可以达到吸振器宽频带减振的目的。

图7 未加负刚度的主系统频率传递函数Fig.7 Acceleration vibration transmission of primary vibration system without negative stiffness
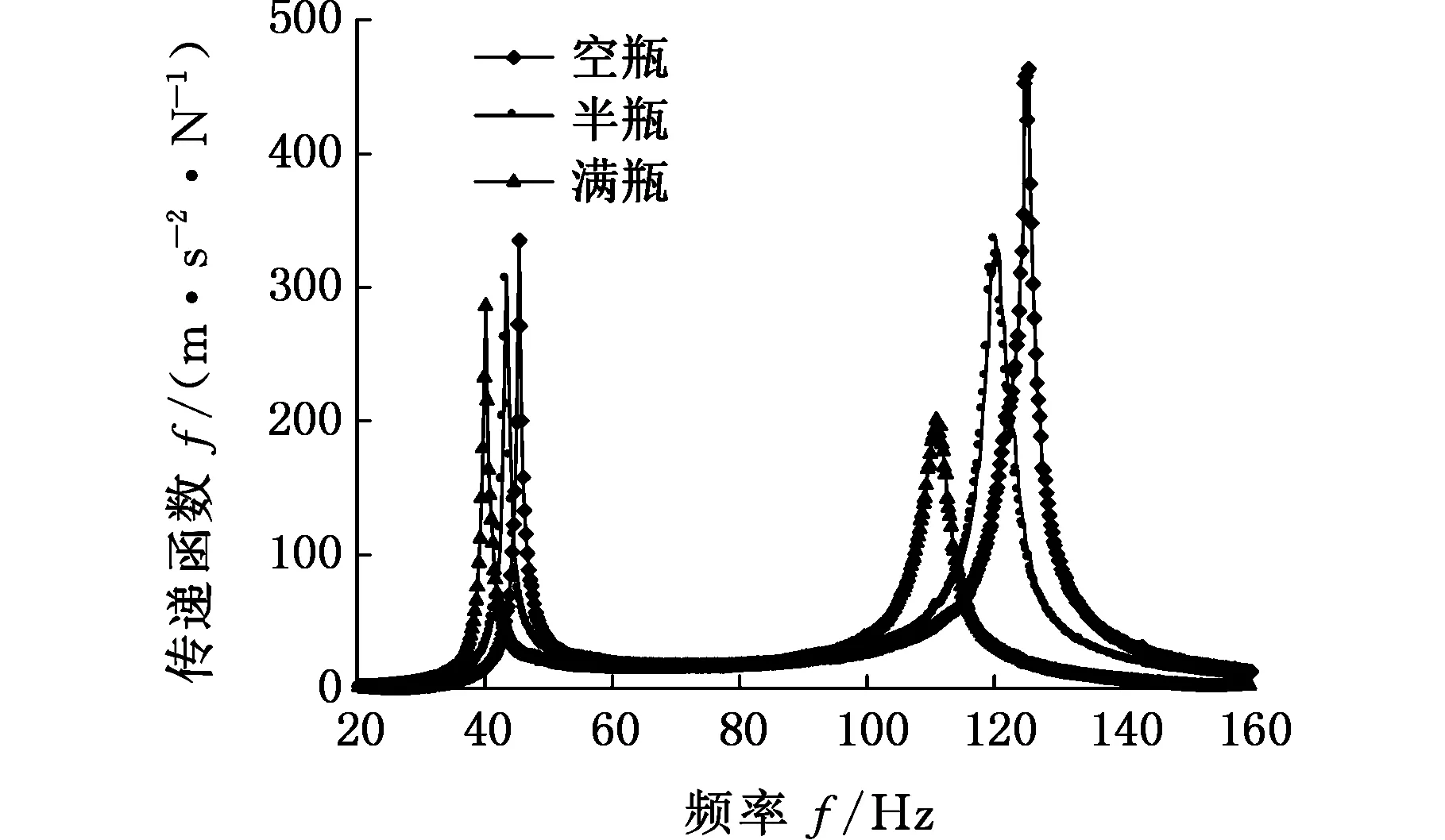
图8 未加负刚度的吸振器频率传递函数Fig.8 Acceleration vibration transmission of absorber vibration system without negative stiffness

图9 加负刚度的主系统频率传递函数Fig.9 Acceleration vibration transmission of primary vibration system with negative stiffness

图10 加负刚度的吸振器频率传递函数Fig.10 Acceleration vibration transmission of absorber vibration system with negative stiffness
在加了负刚度机构的状态下,进行激振频率为20~160 Hz的扫频试验,测得吸振器玻璃瓶空、玻璃瓶加半瓶水和玻璃瓶加满瓶水三种状态下的幅频特性曲线,如图9、图10所示。从图中可以看出,在加了负刚度机构之后,该系统的前两阶固有频率向左移动更明显,即固有频率变小更明显,减振效果非常明显。验证了负刚度机构可以使吸振器具有较好的低频有效性。
将试验得到的主系统频率响应函数与前文通过MATLAB数值仿真得到的主系统的振动响应函数进行对比可知,该试验结果与MATLAB仿真结果的趋势完全相同,从而在仿真和试验两个方面都验证了变质量-负刚度动力吸振器能够在更宽的频带上明显减小主系统振动。
为了更加直观地看出吸振的实际效果,试验测试了变质量-负刚度动力吸振系统在频率为50 Hz下的时域信号,如图11、图12所示。未加负刚度时,空瓶状态下主系统振幅高达450 μm,加满水之后主系统振幅降低至100 μm。安装负刚度机构后,空瓶状态下主系统振幅约为220 μm,加满水之后主系统振幅降低至50 μm,验证了变质量-负刚度动力吸振器具有非常好的减振效果。

图11 未加负刚度主系统的时域图Fig.11 Time response of primary vibration system without negative stiffness
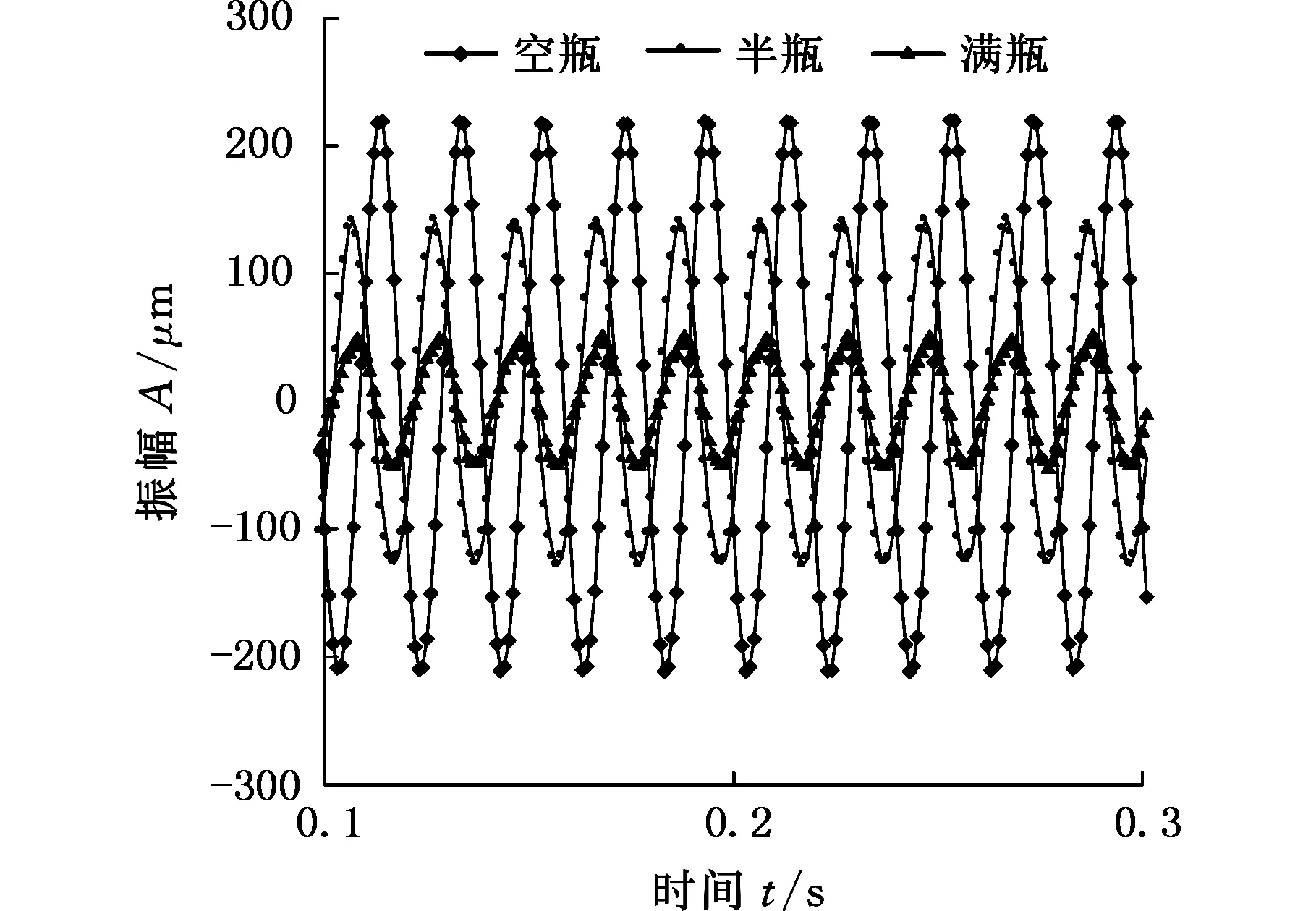
图12 加负刚度主系统的时域图Fig.11 Time response of primary vibration system with negative stiffness
最后,进行了PID控制系统下的连续控制。本系统的被控量为水的质量,结合被控对象的特点选取液位控制。液位控制的目的就是为了使得水瓶中的水位保持在期望的位置,当悬臂梁振幅大于期望值时,水泵打开往水瓶中抽水,通过控制水的质量来控制悬臂梁的振幅。调整PID控制系统的参数可以使悬臂梁系统实现反共振状态,反共振状态就是控制效果最佳的状态。以动力吸振系统频率为50 Hz为例,来验证PID控制算法对变质量-负刚度吸振系统在40~60 Hz之间任意频率下的吸振效果。本文采用一种经验法来调整PID控制系统的参数,先根据运行经验确定一组调节器参数,并将系统投入闭环运行,然后人为地加入阶跃扰动,观察被调量输出的阶跃响应曲线。这样反复试验,当PID参数kp=10,ki=0.8,kd=0时,可以得到较好的控制结果。结果如图13、图14所示。
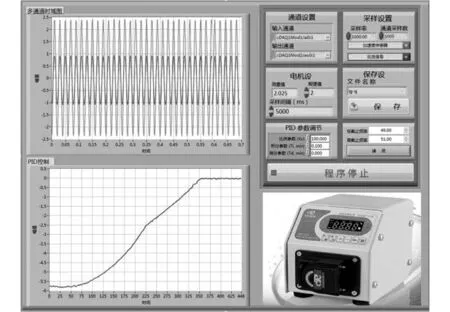
图13 程序界面Fig.13 Program interface
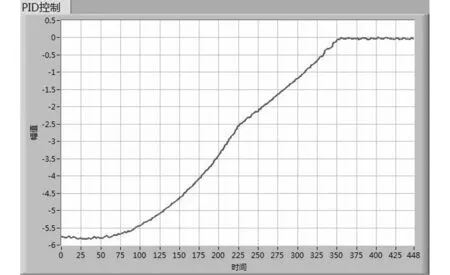
图14 PID控制过程幅值变化图Fig.14 Amplitude changes in PID control process
由图13、图14可见,在PID控制之前,主系统悬臂梁的相对幅值高达5.75 mm。随着控制过程的进行,悬臂梁的幅值逐渐减小。当幅值减小到2 mm时,相对幅值为0,此时振动达到最小值并稳定在该处,获得了较好的振动抑制结果。因此,可以通过PID连续控制使变质量-负刚度吸振系统自动调整至反共振状态,达到最佳振动抑制效果。
4.3 结果分析
为了更明显地看出变质量-负刚度动力吸振器的减振性能,对主系统二阶固有频率进行了分析,结果如表2所示。从表2中可以看出,在满瓶水情况下,未加负刚度时,主系统二阶固有频率为110 Hz,加了负刚度时,主系统的二阶固有频率降低到91 Hz,主系统固有频率最大可以提前17.3%。通过引入负刚度,可以获得频带大幅拓宽、减振效果非常好的动力吸振器。
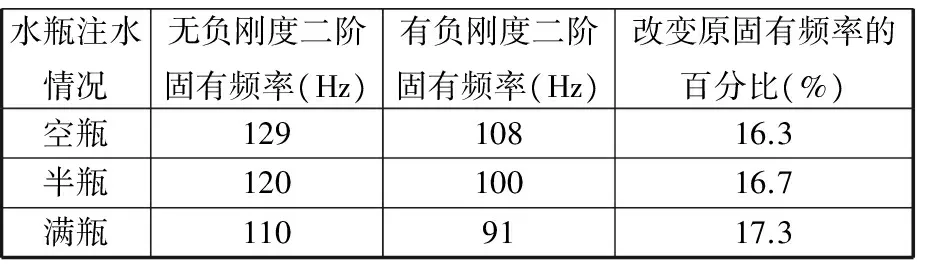
表2 负刚度对固有频率的改变分析
5 结论
本文提出了一种变质量与负刚度相结合的新型动力吸振器,对该动力吸振器模型及原理进行了理论分析,搭建了试验台和控制系统,并对吸振器的效果进行了试验验证,得到以下结论:①设计的吸振器有效,可以通过调整水的质量来使吸振器处于反共振状态;②试验表明,负刚度能够在更宽的频带上明显减小主系统振动,可使主系统固有频率提前17.3%;③通过PID控制可以使吸振器自动调整至反共振状态,达到最佳振动抑制效果。
参考文献:
[1] KELA L, VAHAOJA P. Recent Studies of Adaptive Tuned Vibration Absorbers/Neutralizers [J]. Appl. Mech. Rev., 2009, 62,0608016.
[2] LIAO G J, GONG X L, KANG C J, et al. The Design of an Active-adaptive Tuned Vibration Absorber Based on Magnetorheological Elastomer and Its Vibration Attenuation Performance [J]. Smart Materials & Structures, 2011, 20(7): 145-151.
[3] KOMATSUZAKI T, IWATA Y. Design of a Real-time Adaptively Tuned Dynamic Vibration Absorber with a Variable Stiffness Property Using Magnetorheological Elastomer [J]. Shock Vibration, 2015, 2015: 1-11.
[4] HIRUNYAPRUK C, BRENNAN M J, MACE B R,et al. A Tunable Magneto-rheological Fluid-filled Beam-like Vibration Absorber [J]. Smart Materials & Structures, 2010, 19(5): 055020.
[5] GHORBANI-TANHA A K, RAHIMIAN M, NOORZAD A. A Novel Semiactive Variable Stiffness Device and Its Application in a New Semiactive Tuned Vibration Absorber [J]. Journal of Engineering Mechanics, ASCE, 2011, 137(6): 390-399.
[6] MEGAHED S, ABOUUBAKR A K. Vibration Control of Two Degrees of Freedom System Using Variable Inertia Vibration Absorbers: Modeling and Simulation [J]. J. Sound Vibration, 2010, 329(23): 4841-4865.
[7] 赵艳青, 夏晶晶, 高强. 变质量颗粒阻尼吸振器及其宽频减振性能 [J]. 中国机械工程, 2015,26(19): 2571-2574.
ZHAO Yanqing, XIA Jingjing, GAO Qiang.VMTPD and Its Performance of Wide Band Vibration Reduction[J].China Mechanical Engineering, 2015,26(19): 2571-2574.
[8] LEE C, CHEN C. Experimental Application of a Vibration Absorber in Structural Vibration Reduction Using Tunable Fluid Mass Driven by Micropump [J]. J. Sound Vibration, 2015, 348(5/6): 31-40.
[9] WU W, CHEN X, SHAN Y. Analysis and Experiment of a Vibration Isolator Using a Novel Magnetic Spring with Negative Stiffness[J].J. Sound Vibration, 2014, 333(13): 2958-2970.
