MATLAB在机器人虚拟仿真实验教学中的应用
2018-05-02刘相权
刘相权
摘要:本文简要介绍了MATLAB在机器人虚拟仿真实验教学中的基本应用。以PUMA560机器人为研究对象,在MATLAB环境下,用Robotics Toolbox建立了该机器人的运动学模型,并对其进行求解,绘制了关节运动曲线和机器人末端运动轨迹。通过使用虚拟仿真技术,使学生的创新能力和实践能力得到提高。
关键词:MATLAB;机器人;虚拟仿真;实验教学
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2018)15-0261-02
在机器人学课程的实验教学中,一方面由于机器人价格比较昂贵,不可能用许多实际的机器人来作为教学实验设备,另一方面,由于机器人的教学涉及大量数学运算,手工计算烦琐,采用虚拟仿真技术可以有效地提高教学的质量和效率,在实验教学中的作用越来越明显[1]。本文以PUMA560机器人为研究对象,采用改进的D-H法分析其結构和连杆参数,运用Robotics Toolbox构建运动学模型并进行运动学仿真。
一、PUMA560机器人的结构及连杆参数
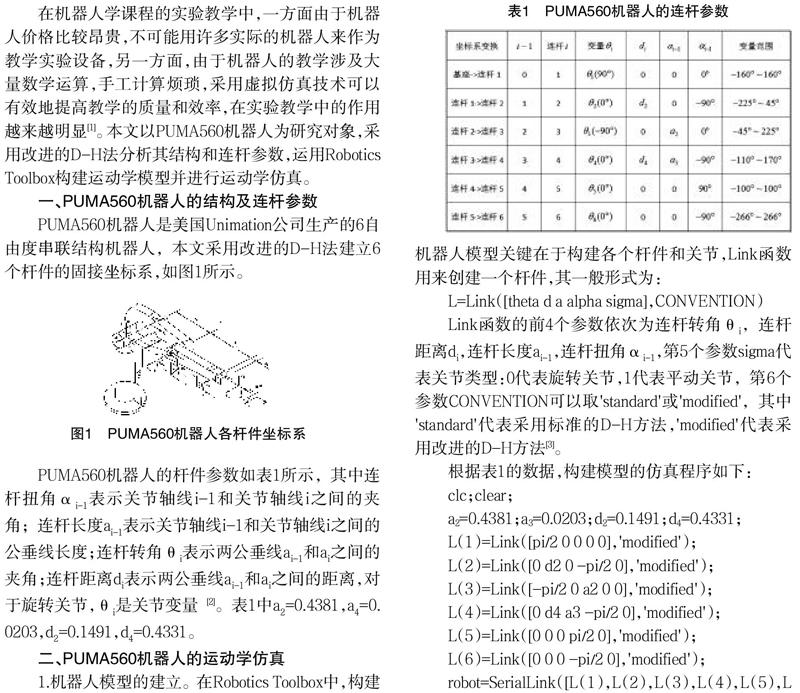
PUMA560机器人是美国Unimation公司生产的6自由度串联结构机器人,本文采用改进的D-H法建立6个杆件的固接坐标系,如图1所示。
二、PUMA560机器人的运动学仿真
1.机器人模型的建立。在Robotics Toolbox中,构建机器人模型关键在于构建各个杆件和关节,Link函数用来创建一个杆件,其一般形式为:
L=Link([theta d a alpha sigma],CONVENTION)
根据表1的数据,构建模型的仿真程序如下:
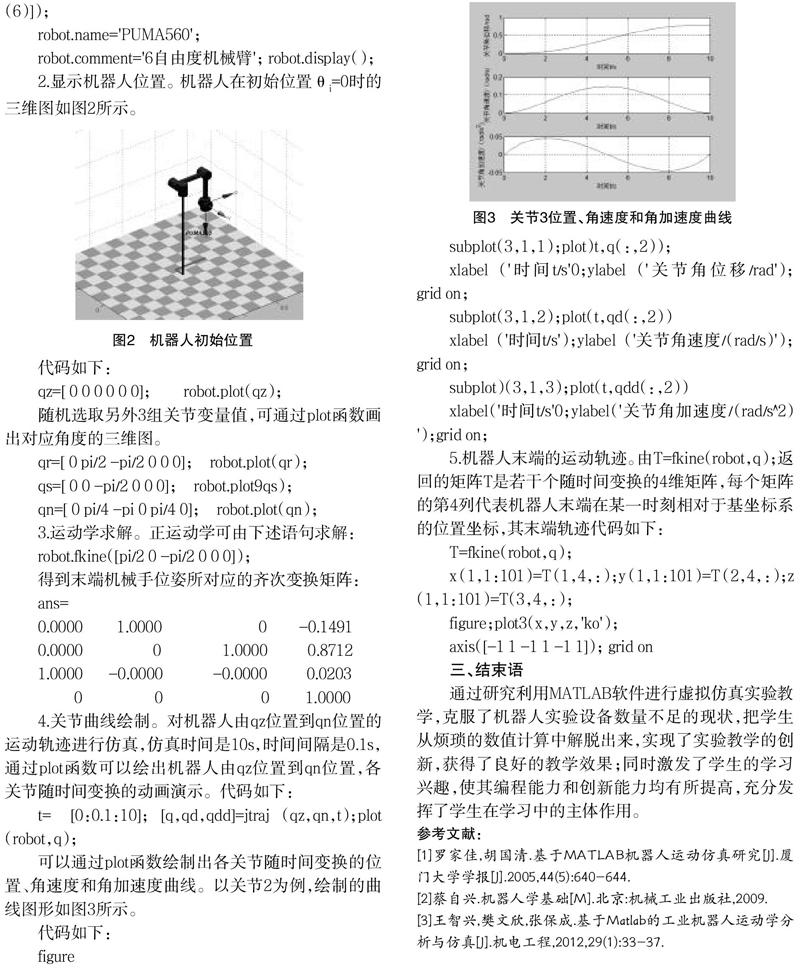
三、结束语
通过研究利用MATLAB软件进行虚拟仿真实验教学,克服了机器人实验设备数量不足的现状,把学生从烦琐的数值计算中解脱出来,实现了实验教学的创新,获得了良好的教学效果;同时激发了学生的学习兴趣,使其编程能力和创新能力均有所提高,充分发挥了学生在学习中的主体作用。
参考文献:
[1]罗家佳,胡国清.基于MATLAB机器人运动仿真研究[J].厦门大学学报[J].2005,44(5):640-644.
[2]蔡自兴.机器人学基础[M].北京:机械工业出版社,2009.
[3]王智兴,樊文欣,张保成.基于Matlab的工业机器人运动学分析与仿真[J].机电工程,2012,29(1):33-37.
