基于Hough变换的卷积神经网络下微多普勒特征目标分类
2018-05-02邱思杰龙振弘
邱思杰 ,龙振弘
(1.三明学院 机电工程学院,福建三明 365004;2.装备智能控制福建省高校重点实验室,福建 三明 365004;3.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;4.福建广播电视大学三明分校,福建三明 365000)
当目标在雷达视线方向有相对速度并被雷达照射到时,雷达反射波的载频会发生调制现象,这种现象称为多普勒频移,载频的偏移量就是目标的多普勒频率。同时,如果目标除了自身的平动外还有其他部件相对于自身平动的摆动、转动等微运动,这些微运动会产生目标多普勒频率附近的副边带,这些副边带被称为微多普勒频率[1]。
在实际应用中,地面战场侦察雷达不仅需要完成目标的探测,更总要的是对目标属性进行分类识别。目前,主要还是靠有经验的士兵对目标的微多普勒特征进行辨别,给雷达操纵员增加了很大负担;其识别准确率受人为的随机性很大。因此,对单兵便携雷达的目标属性自动识别具有很大的意义,雷达的智能化、信息化研究是满足现代高技术战争的需要。
基于上述背景,研究基于微多普勒特征下的人和轮式车辆分类问题。单兵便携雷达目标识别是在雷达探测的基础上,对目标回波信号进行分析,从而确定目标的种类、状态以及型号等特性。
1 原理与方法
1.1 人体的运动雷达回波分析
人行走时人体的重心是上下摆动的,人体躯干的平移分量是随时间周期性变化的,人体的四肢在躯干平移的基础上有相对的摆动,摆动的幅度与四肢的长度、摆动频率、平移速度有关。设摆动幅度为 A0,摆动频率为 ω0,摆动的初始角为 μ0,则人体的微运动可用如下公式表示:A0sin(ω0t+μ0),由该公式可看出人体的微运动是随时间呈三角函数变化的。因此,人体行进的微多普勒效应回波的周期性很明显,在所有谐波分量中躯干分量的比重最大,并随着在频率上呈周期性变化,四肢分量都是在躯干平移的基础上叠加一个时间上的正弦函数[1]。
1.2 轮式车辆运动的雷达回波分析
轮式车辆运动可分解为车身的平动加上轮胎转动的微运动,因此轮式车辆的多普勒信号由两部分组成,第一部分是反映车身平动的多普勒信号,第二部分是反映轮胎旋转的多普勒信号。当车身速度为V时,车辆的微动结构与车身的相对速度分布在[-v,v]之间,相应地,其相对于车身的微多普勒频率分布在[-fd,fd]之间[2]。实际中,由于橡胶轮胎对雷达发射波的后向散射作用较弱,因而轮式车辆的微多普勒成分不明显。
1.3 数据来源
本文使用雷达收集了人和轮式车辆分别在飞机场和公路上的实测数据,使用1642B1信号发生器(南京新联电讯仪器有限公司)、安捷伦8592频谱仪、泰克科技公司TDS210数字示波器、SX2222视频毫伏表(杭州高新电子有限公司)采集到的数据是对固定目标抵消以及动目标检测算法后,降频到音频段处理。其中有两种目标属性分别在飞机场和公路。为了使得实验结果更具意义,在数据采样过程中尽可能避免录取时间上过于集中,从而保证了选取的训练样本集和测试样本集来自不同时间段录取的数据。
从上述对人体和轮式车辆运动所反射的雷达回波分析可以得到结论,人体躯干和轮式车辆的车身运动的雷达回波在回波总能量中的占比较大,四肢摆动和轮胎转动所造成的微动能量在回波总能量中的占比较小,本文尝试首先从能量角度出发,通过分析人和轮式车辆各自的微动能量与总能量关系的差异性,探讨该差异性是否能够达成目标分类的目的。
2 基于EMD分解的能量比算法特征提取分类
EMD是由Norden E.Huang提出的一种尺度分离算法。其基本思想是利用3次样条函数拟合信号的上下包络,信号每减去一次上下包络中心轴线,就得到一条轴对称的波形(IMF分量)。该算法本质上是将非平稳信号进行轴对称化处理,然后按频率从高到低逐次分离得到平稳的各IMF分量。因此,EMD算法能够使非线性、非稳态的信号转换为多个线性、稳态的 IMF信号。分解出的 IMF分量之间能量比是相对稳定的,经 EMD处理后所得的IMF分量与信号的总能量比是稳定的[3]。
目标的微多普勒信号经过EMD分解后,会生成若干个IMF分量,每一个IMF分量都包含了目标微动部分所激励的频率,如人体四肢的摆动和轮式车辆的车轮的转动的微多普勒效应。当目标加减速或转向时,微动部分在雷达视线上的速度分量会发生变化,因此微多普勒信号频率也会有一定变化。但是,在频域下各微动部件所激励的微多普勒信号分解出的IMF分量之间的能量比、各IMF分量与总能量的能量比却是相对稳定的。
基于此,本文提出了一种基于EMD分解的能量比特征分类方法。该方法首先对输入信号进行经验模态分解(EMD)得到各IMF分量,计算各IMF分量的能量与总能量之间的比值,然后选取区分度大的比值作为分类器的输入,见图1~2。各 IMF分量占总信号能量的比公式如下:

Ai为频谱幅值大小,i表示第i个 IMF分量。ki所有有效IMF分量的能量之和的比值,可以作为EMD网络的特征向量。
分别取在公路和机场2种场景,人和轮式车辆运动的微多普勒效应的特征信号各30组,按上述流程处理后,将得到的各层能量比归一化后取均值,结果如图3所示。
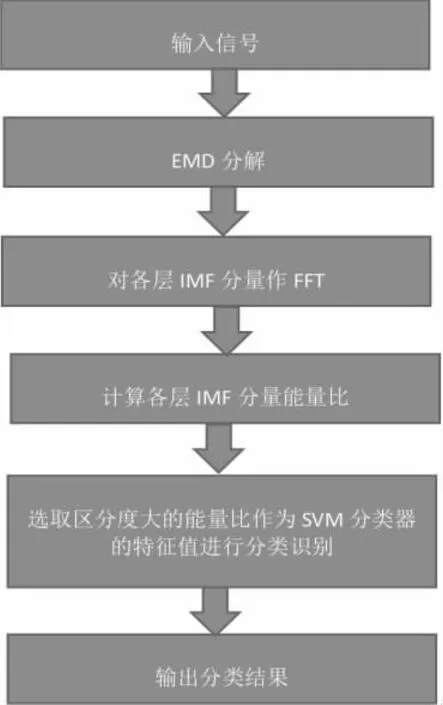
图1 EMD分解的能量比算法特征提取流程图

图2 人和车的微多普勒信号的EMD分解得到的各 IMF分量及其FFT频谱
通过图3可以发现,信号经EMD分解后,各IMF分量的能量比不同。其信号能量大部分集中在前4个IMF分量,区分度较大,后4个IMF分量所具有的能量较少,且区分度较小。因此,选择区分度较大的前4层IMF分量能量与总能量的比值作为特征。
对训练数据和测试数据按上述流程进行处理后,采用支持向量SVM对提取的特征进行了分类,结果如下表1所示。

图3 各层能量比归一化

表1 实测数据分类结果
3 时频分析下的卷积神经网络
3.1 短时傅里叶分析下的微多普勒特征信号处理
大部分的单兵便携雷达都是窄带雷达,其雷达回波包含着目标微动部件的微多普勒效应。然而,目标的微多普勒产生的回波信号是非平稳的,通过传统的傅里叶变换缺乏局部时间信息,仅对平稳信号处理有效,无法适应复杂的时变频率调制信号。但是,经过短时傅里叶变换,移动窗函数使信号在处理一个短的时间间隔内是平稳的,然后在每一个时间宽度内完成快速傅里叶变换,计算出不同时刻的功率谱。这样,不但能够得到目标的较为精细的频率,还可以得到其频率随时间变化的时频谱图,并且目标时频谱图中包含了重要的目标的微多普勒信息[4],如图4所示。

图4 人与车辆回波信号 STFT时频谱
从图4可以看出在路和机场2种场景下,与轮式车辆比较,人体躯干的多普勒效应分量在时频图中呈现发散,断续状,该分量附近由四肢摆动引起的微多普勒效应明显,而轮式车辆由车身运动引起的多普勒效应分量在时频图中呈明显的柱状,橡胶轮胎转动引起的微多普勒效应不明显。因此,人与车辆分类的问题就可转化为多普勒信号时频图分类的处理问题上来。目前,常规的多普勒信号时频图识别多依赖于人为指定一种特定的信号处理方式来获取信号中数学特性,使其成为观测目标的一个特征值,然后基于这些特征值,配合大量的样本数据训练分类器,最终逼近待解决问题的信号模型。这种传统目标分类识别模式耗费了研究人员大量的精力,才提出一种解决某个特定问题的特征提取方法,而且该特征提取方法只能适用于范围很窄的问题,不具有很好的移植性。因此采用自动获取目标特征算法的卷积神经网络就是一个非常好的解决手段。
3.2 卷积神经网络模型与框架
本文结合卷积神经网络完成对信号的时频图特征自学习,设计了一个5层卷积神经网络,由输入层、卷积层、激活层、池化层、全连接层和输出层构成。
(1)输入层:网络的输入为 512×512像素大小的3通道RGB图像。其中训练与测试集分别记为
TR为训练数据集,TE为测试数据集,输入xn∈R512×512。
(2)卷积层:在卷积层中,层与层之间相互连接的特征图由一个或者多个卷积核通过卷积运算对输入时频图进行处理,可学习到鲁棒性较高的特征。为保证网络深度,减少参数,提升网络泛化能力,该网络第一个卷积层采用的卷积核的尺寸较小,均为11×11,第二个卷积层卷积核大小为5×5,所有卷积核都同时作用于相应前一层的所有特征图上,且同一卷积核对于前一层不同特征图的权重不一致。
(3)激活层是通过层级非线性映射的复合使网络的非线性刻画能力得到提升。本文中采用Sigmoid函数,在保证信号特征在空间映射有很好的效果,同时,还使得每层结果具有一定稀疏性。
(4)池化层:可以降低空间维度,减少计算量,文中选用池化半径为2。
(5)全连接层:输出层也是全连接层,共有4个节点,分别代表人在机场、人在公路、车在机场以及车在公路4种状态。其实现过程如下所示:
imageInputLayer([512 512 3])
convolution2dLayer(11,16,'Padding',2)
batchNormalizationLayer
reluLayer
maxPooling2dLayer(2,'Stride',2)
convolution2dLayer(5,64,'Padding',1)
batchNormalizationLayer
reluLayer
maxPooling2dLayer(2,'Stride',2)
fullyConnectedLayer(4)
由表2分析可知,适当的卷积神经网络模型,不仅具备自动学习特征的深度学习能力,而且可以提升系统的识别率,之后的实验则均是建立在上面5层卷积神经网络模型上。同时,也发现该神经网络耗费了大量的硬件资源,主要原因是输入的数据量太大了,通过两个卷积层,数据吞吐量急剧增加。因此本文提出了使用卷积神经网络之前,应对数据进行预处理,在保证不丢失主要特征信号的同时,尽量减少输入数据量。
4 Hough变换与卷积神经网络结合的目标分类
微多普勒特征信号的时频分析虽然能很好的解析其微动特征,但在CNN网络进行目标分类时需要对整个512×512像素的图像进行卷积,使系统的实时性能严重滞后。采用Wigner-Ville分布优良的时间边缘性、频率边缘性和能量集中性,可以把微多普勒特征信号集中在特定的区域内,算法处理后的信号具有较好的直线特性,Hough变换原理正是建立在直线与圆弧检测特性的基础上,可以很快速得到时频图的特征向量。

表2 实测数据目标属性分类结果
4.1 Wigner-Ville时频分析算法
Wigner-Ville不含有任何的窗函数,因此避免短时傅立叶变换时间分辨率,频率分辨率相互牵制的矛盾,具有理论上最高的分辨率,以及很高的时频聚集性,高的时频聚集性可以帮助我们更加准确地估计目标的目标在短驻留时间内的瞬时频率分布。我们对提取到的人和轮式车辆在路和机场两种场景中的雷达回波信号分别计算他们Wigner-Ville分布,绘出其2D分布图,如图5所示。

图5 Wigner-Ville时频结果
图5(a)为人在机场的雷达回波的Wigner-Ville2D分布,主要频率成分为人体躯干的雷达回波,散布在主频率周围的是频率成分为四肢摆动的微多普勒回波、地面杂波以及上述三种回波组成的交叉项,由于机场场景地形平坦开阔,杂波较少,因而主频率成分呈一定的发散状,在图形上呈一定的单条直线特征。
图5(b)为人在路上的雷达回波的Wigner-Ville2D分布,图像呈雪花状,在主频率成分不明显,原因是场景杂波较多,人体躯干的多普勒回波、四肢摆动的微多普勒回波、地面杂波组成的交叉项干扰严重。
观察图5(c)和图5(d)可以发现,与行人相比较,轮式车辆橡胶轮胎转动引起的微多普勒效应不明显,因而其Wigner-Ville2D分布图中,车身雷达回波的主频率非常明显,在图形上呈凝聚的直线状,而微多普勒回波、地面杂波及其与主频率组成的交叉项在主频率周围呈稀少零散的点状分布。
因此与图4的SFTF时频图相比较,可以明显看出在路和机场2个场景中,人和轮式车辆雷达回波的Wigner-Ville2D分布图在直线特征方面具有更好的区分度。
4.2 基于Hough变换及Wigner-Ville的微动目标分类
Hough变换是图像处理中的一种特征提取技术,它通过算法检测具有特定形状的物体。该过程在一个参数空间中通过计算累计结果的局部最大值得到一个符合该特定形状的集合作为Hough变换结果。本文对Wigner-Ville算法分析后的时频图进行Hough变换,获取了图像的直线特征后进行标识[8]。把这些能量集中的图像作分解成32×32像素,然后进入卷积神经网络训练学习。通过表3可以看出特征提取后的深度学习不仅可以大大提高识别率而且运行速度得到保证。

表3 实测数据目标属性分类结果
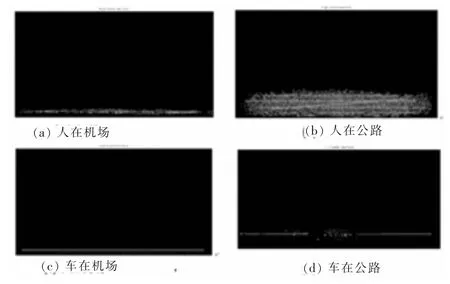
图6 Wigner-Ville时频图的Hough变换
5 结论
人和轮式车辆,微动部件分别为四肢和橡胶轮胎,微动时差异性明显,这种差异性在多普勒域中以微多普勒分量的形式体现出来,使得短驻留时间条件下人和轮式车辆的分类成为可能。在此基础上本文利用微多普勒原理分析了某型单兵雷达提取到的经过去杂波、降频到音频段的人和轮式车辆的雷达回波信号,针对人和轮式车辆的雷达回波信号的微多普勒效应在时频域上的特点,提出了3种人和轮式车辆的分类算法,汇总数据后(见表4)可得出以下结论:
(1)基于EMD分解的能量比算法。该算法首先对信号进行EMD分解,计算出各层IMF分量的能量比特征,用SVM分类器进行分类,分类结果与人工识别比较并无替代优势,原因在于本文所采用的数据是原始回波信号经过处理后得到音频信号,与原始信号比,各层的IMF分量已经发生了改变,因而对识别率有一定影响。
(2)基于时频图与卷积神经网络相结合的人和轮式车辆分类算法。该算法是对信号进行短时傅里叶变换(STFT),将得到的谱图数据送到训练好的卷积神经网络中进行分类识别,识别率较高,人与轮式车辆车的平均识别率均不低于90%。但也存在对GPU的并行性能要求高,识别耗时长的缺点。

表4 多算法融合的微多普勒特征目标分类结果
(3)基于Hough特征的时频图与卷积神经网络相结合的人和轮式车辆分类算法。该算法是对信号进行Wigner-Ville时频分析,然后对谱图数据进行Hough直线检测,对检测到的直线进行标识,最后将谱图数据送到训练好的卷积神经网络中进行分类识别,与“基于时频图与卷积神经网络相结合的行人和轮式车辆分类算法”比,在相同的硬件条件下,识别率有所提高,耗时大幅度减少,具有实用意义。
参考文献:
[1]马艳艳.基于微多普勒效应的地面运动目标噪声稳健分类研究[D].西安:西安电子科技大学,2014.
[2]李彦兵,杜兰,刘宏伟,等.基于微多普勒效应和多级小波分解的轮式履带式车辆分类研究[J].电子与信息学报,2013,35:894-900.
[3]许昕,潘宏侠.改进的 EMD 在齿轮箱故障诊断中的应用研究[J].机械传动,2014,10:4-8.
[4]耿志高.SAR_GMTI车辆目标微动信号特性分析及分类[D].杭州:杭州电子科技大学,2016.
[5]张国祥.基于深度神经网络的人车分类算法[D].西安:西安电子科技大学,2016.
[6]赵若冰.雷达目标的微多普勒特征建模与分析技术研究[D].南京:南京理工大学,2017.
[7]周敏,史振威,丁火平.遥感图像飞机目标分类的卷积神经网络方法[J].中国图象图形学报,2017,22:702-708.
[8]向道朴.基于 RANSAC 的激光网格标记图像特征提取[J].计算机工程与科学,2017(8):1495-1501.
[9]杨威.基于微多普勒特征的人体微动识别系统设计与实现[D].长沙:国防科技大学,2010.
[10]刘海龙.基于深度卷积神经网络的图像检索算法研究[J].计算机应用研究,2017,34:3816-3819.