基于三维激光扫描技术的某金矿采场体积测量与计算
2018-05-02李鹏宇牟占武
李鹏宇 姜 岳 宗 琪 牟占武 袁 鑫 姜 岩
(1.山东科技大学测绘科学与工程学院,山东 青岛 266590;2.山东科技大学地球科学与工程学院,山东 青岛 266590;3.山东黄金矿业股份有限公司,山东 烟台 264000)
在黄金矿山开采中,采场验收测量与计算是一项重要的日常工作。传统采场验收测量一般采用支距丈量法,即首先利用全站仪或激光测距仪进行观测,然后采用一定的间距截取平行断面,计算各断面的面积,进而利用梯形公式计算总体积[1]。该方法通过在矿房顶板上布设控制点采用点上对中方式进行观测,测量难度较大[2],导致每次验收测量耗时较长。此外,矿房顶板不稳固也在很大程度上增加了测量工作的安全隐患。三维激光扫描技术突破了传统单点测量方法,具有高效率、高精度、非接触三维测量等优势,在诸多领域得到了广泛应用[3]。山东某黄金矿山为提高采场验收测量精度与工作效率,将三维激光扫描技术应用于采场验收测量,对采场空间体积进行测量和计算。
1 三维激光扫描测量原理
本研究应用的三维激光扫描仪型号为Trimble FX,首先由激光极管对目标发射出激光脉冲信号,然后由接收器接收目标物表面反射回的脉冲信号,根据每个激光脉冲从发出到目标物表面再返回到接收器所经过的时间来计算距离,同时测量每个脉冲的角度,经过数据处理可以得到目标物的三维真实坐标[4-5]。
三维激光扫描仪发射器发射1个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回至接收器,据此可以计算出目标点P与扫描仪O的斜距S,控制编码器同步测量每个激光脉冲横向、纵向扫描角度观测值θ、α。三维激光扫描坐标系一般为仪器自定义坐标系,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直构成了右手坐标系(图1)[6-7]。
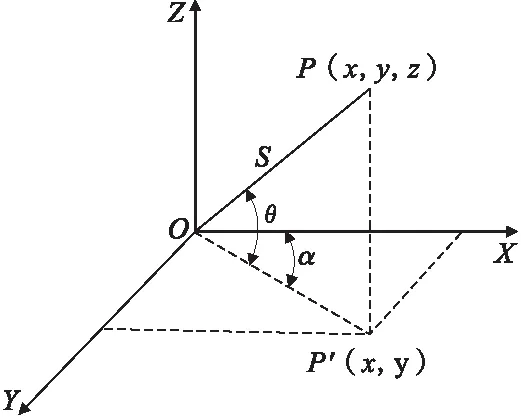
图1 三维激光扫描坐标系Fig.1 Coordinate system of 3D laser scanning
三维激光扫描坐标系统属于极坐标测量系统,图1中P点的三维坐标计算公式为

(1)
2 采场体积测量与计算方法
2.1 点云空间配准
为解决井下复杂采场空间单次测量点云数据与整体坐标的统一问题,需要对点云数据进行空间配准。现实中采场空间体积测量工作是由一系列单次测量工作组成,其点云数据需要通过配准统一至整体坐标系中[8]。本研究采用基于标靶的配准方法,以转换成符合要求的初始测站数据建立的坐标系为基准,通过同名标靶的不同坐标采用基于罗德里格矩阵坐标转换方法进行点云数据配准、平差,得到配准后的拼接站点云数据,其中每隔8站加入黑白标靶的配准、平差数据,以此类推,即可得到整个采场的点云拼合数据[5]。点云数据处理流程如图2所示。

图2 点云数据处理流程Fig.2 Processing flow of point clouds data
罗德里格矩阵坐标转换方法的基本原理是将点云数据在空间坐标系O0-X0Y0Z0中的坐标转换至坐标系O0-XiYiZi中,经过坐标轴旋转和平移便可实现点云数据坐标系统一。坐标系之间的转换公式为
(2)
式中,xi,yi,zi为经过转化后的点云数据坐标;x0,y0,z0为点云数据在三维激光扫描仪坐标系中的坐标; [Δx,Δy,Δz]T为平移参数矩阵;λ为平移尺度;R为坐标旋转矩阵。
2.2 点云清洗
由于采场空间表面粗糙度大、干湿不均,导致在三维激光扫描过程中不可避免地会获得大量的噪声点云。该类噪声点(包括漂移点、孤立点、冗余点、混杂点等)的存在不仅增加了数据量,而且严重影响了点云质量和后续三维模型构建,会降低数据处理效率,因而有必要进行点云滤波,剔除该类冗余数据。将经过滤波后的点云数据单独生成点云集合,即可完成每一测站的点云数据滤波工作。
2.3 三维建模
通过数据拼接和数据清洗得到了采场空间表面信息,在此基础上利用曲面拟合、特征面粘贴方法将采场空间表面细部数据进行特征化处理,并选用适宜的建模方法对点云数据进行三维建模。在仪器自身因素、入射角和测距的双重几何因素、采场空间环境和岩体表面特性等一系列因素影响下,本研究采集的点云数据在边墙和拱顶交接部位质量较差,存在点云缺失,在拱顶部位,部分区域出现空洞,需要通过建模方法进行处理。选用基于TIN的建模方法(将抽稀后的点云数据生成密集且不透明的三角网来生成模型)对点云数据进行三维建模。
2.4 体积计算
三维建模后的数据为规则的格网状数据,利用格网将采场顶部的点云切割成n个小方形,通过投影面投影形成n个长方体。取其中任意1个小长方体,假设采样间隔为d,其在数值上等于小投影面的边长dx,即
d=dx=dy,
高为hi,那么整个采场的体积即为n个小长方体体积的总和,即:
(3)
如图3所示,采样间隔越小,对整个采场的划分便越接近实际,体积计算精度也越高,更能凸显出三维激光扫描技术的优越性。

图3 采场体积计算原理示意Fig.3 Calculation theory schematic of stope volume
3 精度分析
影响三维激光扫描空间点位精度的因素有仪器误差、目标物体反射面引起的误差、外界环境条件引起的误差等[9-11]。在进行采场体积测量时,井下温度、湿度、能见度、风力以及气压等条件变化较大,特别是采场空间有限,激光束在采场表面的入射角较大,采场岩石表面粗糙、颜色灰暗,导致反射回的激光较少,(一般情况下反射率小于50%),导致设备的最大扫描距离显著减小。为提高扫描精度,有必要控制扫描距离,一般在水平采场,扫描距离不宜超过30%标称扫描距离;在倾斜采场不超过20%标称扫描距离。本研究使用的Trimble FX型三维激光扫描仪的中误差m0=±2 mm。
本研究采用三维激光扫描仪结合全站仪对采场进行扫描测量,首先利用全站仪进行控制测量,获得黑白靶标的三维坐标,然后根据靶标扫描结果进行坐标转换和匹配。靶标的平面与高程控制测量精度以及空间点位中误差的计算公式为
(4)
式中,mS为测距误差;mθ、mα分别为测角误差;S为水平测量距离;mi、mv分别为仪器高和靶标高量取中误差;ρ为S在XY平面的投影值。
本研究控制测量采用拓普康GTS-332N型全站仪,其标称精度分别为
(5)
mα=±2″,mθ=±5″,S=15 m,θ=45°,mi=mv= ±2 mm,m0=±2 mm。经式(4)计算,Mxyz=±4 mm,则三维激光扫描点P的空间点位中误差
综上分析,三维激光扫描测量精度与5″级全站仪的测量精度基本相等,由于Trimble FX型扫描仪一测回耗时约5 min,最大扫描速度为800 000 pts/s,可见采用三维激光扫描技术能够代替传统采场验收测量方法,可以对采场体积进行高精度计算。
4 工程实例
本研究以山东某金矿为例,选取该矿某采空区的部分区段进行试验(图4)。采场控制点由脉外运输巷开始布设,由外至内连续设置测站直至采空区。

图4 采场平面Fig.4 Planar graph of the stope
4.1 数据采集
本研究试验在采场和脉外运输巷分别设站Scan01、Scan02进行采空区三维激光扫描(图5)。在扫描前,需在各测站附近设置一定数量并在各测站都可以扫描出的小球或目标靶,以确保2次扫描后可以进行点云数据配准。为确保扫描数据一次性配准成功,往往会多放置小球和目标靶,便于在点云数据配准后可以将采场和脉外运输巷进行有效连接[12]。
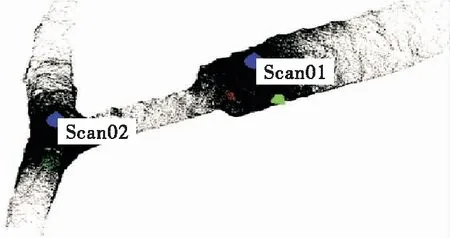
图5 三维激光扫描站点分布Fig.5 Distribution of the measurementstations of 3D laser scanning
4.2 数据处理
点云数据采集完毕后首先进行预处理[13],而后利用Trimble Realworks 6.5软件进行进一步处理。利用目标球和目标靶进行配准实现点云数据拼接,将原本不在一个坐标系内的点云数据统一于同一坐标系内。以转换成大地坐标的第一站数据为基准,首先采用罗德里格矩阵坐标转换方法将下一站的点云数据进行配准、平差,得到配准后的两站的点云数据;然后将每组黑白目标靶所控制的多站点云数据进行拼合,得到采场整体点云数据(图6)。
图6 采场整体点云数据Fig.6 Point clouds data of the whole stope
由于三维激光扫描点云数据量非常大,若直接采用原始数据进行建模,则极大降低了建模效率。因此在构建巷道模型之前需对模型进行抽稀处理。本研究试验选取空间采样的点云抽稀方法以及选择基于TIN的建模方法进行采场三维建模[14],结果如图7所示。

图7 采场三维模型Fig.7 3D model of stope
利用Trimble Realworks 6.5软件对采场模型体积进行了计算,不同采样间隔对应的采场体积如表1所示。分析表1可知:不同采样间隔对于采场体积计算精度的影响较小,因此可以根据采场空间的实际需求设置不同的采样间隔来计算采场体积。

表1 不同采样间隔对应的采场体积Table 1 Stope volume calculation results under theconditions of different sampling interval
4.3 SURPAC软件中三维激光扫描数据共享
SURPAC软件拥有完整的三维立体建模体系,是一款集地质、测量、采矿的信息共享平台,已被广泛应用于金属矿山生产管理工作中。因此,将三维激光扫描数据应用于SURPAC软件中有助于实现采场空间数据共享,便于矿山企业生产管理。由于SURPAC软件无法批量处理点云数据,故本研究将处理后的点云数据进一步进行了抽稀处理,并以“*.dxf”格式导出(图8)。

图8 抽稀处理后的点云数据Fig.8 Point clouds after tin processing
将抽稀处理后的点云数据导入SURPAC软件中进行采场三维建模(图9),而后进行了采场体积计算,结果见表2。

图9 SURPAC软件构建的采场三维模型Fig.9 3D model of stope established by SURPAC software表2 不同计算参数对应的采场空间体积Table 2 Stope volume calculation results under theconditions of different calculation parameters
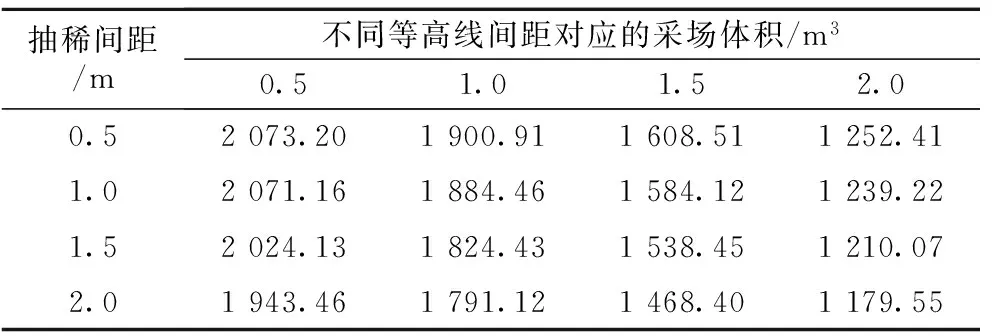
抽稀间距/m不同等高线间距对应的采场体积/m30.51.01.52.00.52073.201900.911608.511252.411.02071.161884.461584.121239.221.52024.131824.431538.451210.072.01943.461791.121468.401179.55
分析表2可知:在其他条件固定的情况下,SURPAC软件计算出的采场体积随着等高线间距和抽稀间距的增大而减小;等高线间距对于采场体积计算精度的影响较大,等高线间距越大,体积计算结果便越小,其与采场真实体积(2 039.14 m3)的误差也越大[15]。在不影响SURPAC软件采场体积计算效率和精度的前提下,为确保采场体积计算精度,等高线间距应小于0.5 m,抽稀间距不宜大于1.5 m。
5 结 论
(1)应用Trimble FX型三维激光扫描仪可以快速、准确、高效地获取矿山采场三维空间数据,平均每次扫描测量耗时不超过5 min,点位中误差为±4.5 mm,与5″级全站仪的测量精度相当,可见三维激光扫描仪能够满足采场验收测量的精度要求。
(2)基于激光扫描的点云数据可以构建采场三维空间精细模型,点云数据采样间隔对于采场体积计算精度的影响较小,合理采样间隔为50~200 mm。
(3)SURPAC软件的不同参数选取对于采场体积的计算精度影响较大,为确保采场体积计算精度,等高线间距应小于0.5 m,抽稀间距应不大于1.5 m。
[1] 赖东林.采空区测量新方法探讨[J].有色金属:矿山部分,2001(5):42-43.
Lai Donglin.Discussion on a new method of goaf measurement[J].Nonferrous Metals:Mine Section,2001(5):42-43.
[2] 徐安泰,李传晗,于 超,等.距离交会法在矿房验收的应用及误差分析[J].计算机光盘软件与应用,2012(11):102-103.
Xu Antai,Li Chuanhan,Yu Chao,et al.Application of intersection law in mine acceptance and error analysis[J].Computer CD Software and Applications,2012(11):102-103.
[3] 吴 侃,汪云甲,王岁权,等.矿山开采沉陷监测及预测新技术[M].北京:中国环境科学出版社,2012.
Wu Kan,Wang Yunjia,Wang Suiquan,et al.New Technology of Monitoring and Prediction in Mining Subsidence[M].Beijing:China Environmental Science Press,2012.
[4] 闫腾飞,李元辉,徐 帅,等.采空区三维激光扫描系统地理坐标定位方法[J].金属矿山,2015(5):135-139.
Yan Tengfei,Li Yuanhui,Xu Shuai,et al.Research on geographical coordinate positioning method of three-dimensional laser scanning system for mine goaf[J].Metal Mine,2015(5):135-139.
[5] 张卓峰.井下激光扫描测量方法及精度分析[D].青岛:山东科技大学,2013.
Zhang Zhuofeng.Laser Scanning Measurement Method and Precision Analysis in Mining[D].Qingdao:Shandong University of Science and Technology,2013.
[6] 柏雯娟.用三维激光扫描技术监测矿山开采沉陷[J].金属矿山,2017(1):132-135.
Bai Wenjuan.Mining subsidence monitoring method based on laser scanning technique[J].Metal Mine,2017(1):132-135.
[7] 冯晓刚,刘明星,撒利伟,等.三维激光扫描在土石方量精计算中的应用[J].地理空间信息,2015(4):49-51.
Feng Xiaogang,Liu Mingxing,Sa Liwei,et al.Application of 3D laser scanning in earth volume calculation[J].Journal of Geomatics,2015(4):49-51.
[8] 韩 亚,王卫星,李 双,等.基于三维激光扫描技术的矿山滑坡变形趋势评价方法[J].金属矿山,2014(8):103-107.
Han Ya,Wang Weixing,Li Shuang,et al.An evaluation method of mine landslide and deformation trend based on three-dimensional laser scanning technology[J].Metal Mine,2014(8):103-107.
[9] 冒爱泉,朱益虎,郝思宝,等.地面三维激光扫描仪精度测评方法和误差改正模型研究[J].测绘通报,2014(2):72-75.
Mao Aiquan,Zhu Yihu,Hao Sibao,et al.The research of accuracy evaluation method and error correction model based on 3D laser scanner[J].Bulletin of Surveying and Mapping,2014(2):72-75.
[10] 郑德华,沈云中,刘 春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005(2):32-34.
Zheng Dehua,Shen Yunzhong,Liu Chun.3D Laser scanner and its effect factor analysis of surveying error[J].Engineering of Surveying and Mapping,2005(2):32-34.
[11] 王俊杰.三维激光扫描数据采集误差来源及精度分析[J].科协论坛,2011(5):97-98.
Wang Junjie.Sources and accuracy analysis of 3D laser scanning data acquisition error[J].Technology Association Forum,2011(5):97-98.
[12] 王仲锋,王 渝,陈 雷.三维激光扫描技术在城市地下空间测量中的应用研究[J].测绘与空间地理信息,2017,40(5):1-4.
Wang Zhongfeng,Wang Yu,Chen Lei.Application of 3D laser scanning technology measure urban underground space[J].Geomatics and Spatial Information Technology,2017,40(5):1-4.
[13] 刘文龙,赵小平.基于三维激光扫描技术在滑坡监测中的应用研究[J].金属矿山,2009(2):131-133.
Liu Wenlong,Zhao Xiaoping.Study on the application of 3D Laser Scanning Technology in Landslide Monitoring[J].Metal Mine,2009(2):131-133.
[14] 臧 伟,钱 林,孙宝军,等.地面三维激光扫描技术在工程测量中的应用[J].北京测绘,2015(3):130-135.
Zang Wei,Qian Lin,Sun Baojun,et al.Application of ground 3D laser scanning technology in engineering survey[J].Beijing Surveying and Mapping,2015(3):130-135.
[15] 沈 宁.三维激光扫描技术在隧道变形监测中的应用研究[D].青岛:山东科技大学,2017.
Shen Ning.Research on Laser Scanner Applied for Deformation Monitoring of Tunnel[D].Qingdao:Shandong University of Science and Technology,2017.
