An Exploration on Adaptive Iterative Learning Control for a Class of Commensurate High-order Uncertain Nonlinear Fractional Order Systems
2018-05-02JianmingWeiYouanZhangandHuBao
Jianming Wei,Youan Zhang,and Hu Bao
I.INTRODUCTION
PAST decades have witnessed tremendous research efforts aiming at the development of systematic design methods for the iterative learning control(ILC)of nonlinear systems performing control task over a finite interval repeatedly.ILC has been proven to be the most suitable and effective control scheme for such repeatable control tasks owing to its capacity of achieving perfect tracking by learning along iteration.Generally,according to the stability analysis tool,ILC can be categorized into two classes:traditional ILC[1]-[5]and adaptive ILC(AILC)[6]-[16].The basic idea of traditional ILC is to use information of the previous execution to design the control signal for current operation by a learning mechanism,which allows to achieve improving performance from iteration to iteration.Furthermore,the stability conclusion of traditional ILC is usually obtained by using contraction mapping theorem and fixed point theorem,which enables traditional ILC to deal with nonlinear plants without any information of the system.Traditional ILC has been developed greatly in theory and application because of its simplicity and availability.However,the main drawback of traditional ILC lies in the requirement of the global Lipschitz continuous condition,which restricts its application to certain nonlinear systems.Besides,the usage of contraction mapping theorem rather than Lyapunov method as the key tool of stability analysis in traditional ILC makes it difficult to relax the global Lipschitz condition to local Lipschitz or even non-Lipschitz condition and cooperate with the mainstream methods of nonlinear control theory,such as adaptive control and neural control.To overcome the constraints of traditional ILC,some researchers tried to introduce the idea of adaptive control into ILC and proposed adaptive iterative learning control[6],[7].AILC takes advantage of both adaptive control and ILC,which successfully overcomes the restriction of global Lipschitz condition,thus it enables us to use fuzzy logic systems or neural networks as approximators to deal with nonlinear uncertainties.In general,the control parameters of AILC methods are tuned along the iteration axis,and the so-called composite energy function(CEF)[8]is usually constructed to analyze the stability and convergence property of the closed-loop systems.The past decade has witnessed great progress in AILC of uncertain nonlinear systems[9]-[16].
Fractional calculus has been studied for more than 300 years.But the researches are mainly in the field of mathematical sciences[17],[18].Until recent decade,the applications of fractional calculus develop rapidly[19],[20].Fractional order systems allow us to describe and model a real object more accurately than the classical integer order dynamical systems.Among the investigations of fractional order systems in the past decades,control design for some fractional order systems has been a hot topic.Many different control methods have been proposed for various kinds of fractional systems[20]-[28].Especially,the research on control and synchronization control design for fractional order chaotic systems is very active[29]-[39].
Comparing with such a large number of results,the papers on the ILC control of fractional order systems are less.Only a few works are reported in the filed of ILC[40]-[53].Moreover,all these literatures are from the viewpoint of traditional ILC and the stability conclusions are obtained by using contraction mapping theorem method.Therefore,as results of integer-order systems,global Lipschitz condition is required for traditional ILC schemes.As for AILC problem of fractional order systems,to the best of our knowledge,there are no results having been reported.
In this paper,we present an AILC scheme for a class of nonlinear fractional order system with both parametric and nonparametric uncertainties in the presence of disturbance.As far as we know,no works have been presented for such a problem up till now.In the proposed AILC scheme,adaptive iterative learning controller with fractional order differential type and difference type learning laws are presented and the CEF containing new integral type Lyapunov function is constructed to analyze the stability and convergence property.The main contributions of the proposed AILC scheme and stability analysis are highlighted as follows.1)To the best of our knowledge,it is the first time,in the literature,that AILC problem of fractional order system is investigated.2)A sliding mode surface of tracking errors is designed by using the sufficient condition for linear fractional order systems.3)A new boundary layer function using Mittag-Leffler function is designed to deal with the initial condition problem in the ILC design of fractional order system.4)Fractional order differential type learning laws with alignment method for unknown constant parameters is used in the AILC method for the first time and integral type Lyapunov function is used to analyze the convergence of estimation errors.5)The hyperbolic tangent function is used to design robust control term for neural network approximation error and bounded disturbance,and a convergent series is introduced to guarantee the learning convergence along iteration index.
The rest of this paper is organized as follow.The problem formulation and preliminaries are given in Section II.The AILC design with parameter updating laws is developed in Section III.In Section IV,the CEF-based stability analysis is presented.A simulation example is presented to verify the validity of the proposed scheme in Section V,followed by conclusions in Section VI.
II.PROBLEM FORMULATION AND PRELIMINARIES
A.Preliminaries
In this subsection,some basic definitions and useful lemmas are given.
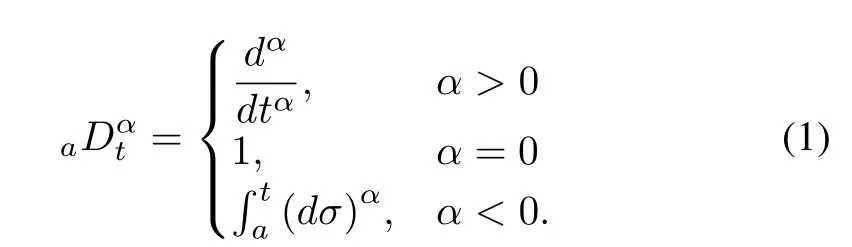
Definition 1[18]:Fractional calculus is a generalization of integration and differentiation to noninteger-order fundamental operatoraDαt,whereaandtare the bounds of the operation andα∈R.The continuous integro-differential operator is defined as
Definition 2[17]:The most important function used in fractional calculus-Eulers gamma function is defined as

Definition 3[17]:Another important function in the fractional calculus named Mittag-Leffler type with two parameters is de fined as

Especially,whenβ= 1,we obtain the Mittag-Leffler function with one parameter

For integer values ofα,(4)reduces to the well-known Cauchy repeated integration formula.
The three most frequently used definitions for the general fractional differintegral are:the Gr¨unwald-Letnikov(GL)definition,the Riemann-Liouville(RL)and Caputo definitions.
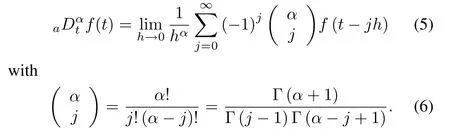
De finition 4[17]:The Gr¨unwald-Letnikov derivative definition of orderαis described as
Definition 5[54]:The Riemann-Liouville fractional integral of orderαof functionf(t)at a time instantt≥0 is defined as

From(7)we can write formula for the Riemann-Liouville definition of fractional derivative of orderαin the following form

forn-1<α<n.
Definition 6[17]:The Caputo fractional integral of orderαof functionf(t)at timet≥0 is de fined as

forn-1<α<n.
Remark 1:Actually,the above three definitions are equivalent under some conditions.We will use the Caputo definition in this paper.In the rest of this paper,the notationDα(·)indicates the Caputo derivative of orderαwitha=0,i.e.,Dα(·)=0Dαt(·).
Lemma 1[55],[56]:Consider the following fractional order autonomous system

where 0<α<1,x∈RnandA∈Rn×n.This system is asymptotically stable if and only if|arg(λ(A))|>απ/2.In this situation,the components of the state vector decay toward zero liket-α.The stable region for fractional order linear systems with 0<α<1 is shown in Fig.1.
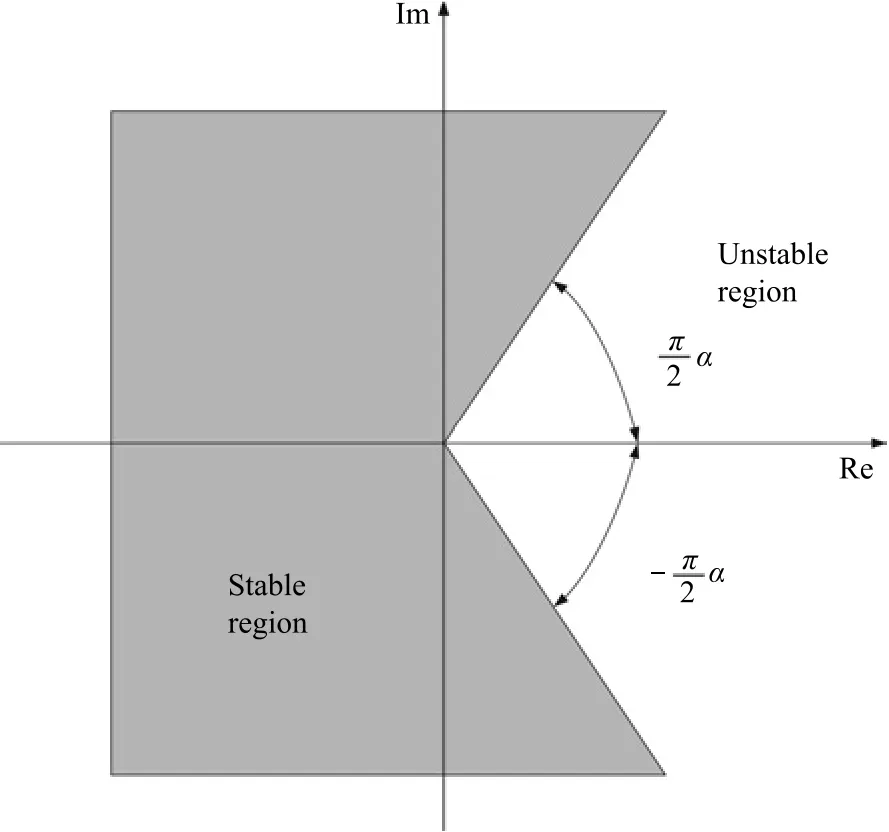
Fig.1.Stability domain for fractional order linear systems with 0<α<1.
Lemma 2[57]:The fractional systemDαy(t)=u(t),0<α<1,is equivalent to the following continuous frequency distributed model

with weighting functionµ(ω)=sin(απ)/(πωα),z(ω,t)∈R.
B.Problem Formulation
In this paper,we consider a class of commensurate highorder uncertain nonlinear systems in the presence of disturbance which runs on a finite interval[0,T]repeatedly as follows:

wheret∈[0,T]is the time,k∈N denotes the times of iteration;xi,k(t)∈R,i=1,...,nandyk(t)are the pseudo state and output variables,respectively;xk(t)=[x1,k(t),x2,k(t),...,xn,k(t)]T∈Rnis the pseudo state vector;f(·)is an unknown smooth function.θ(t)is an unknown continuous time-varying parameter andξ(·)is a known continuous function.d(t)is unknown bounded external disturbance.uk(t)∈R is the control input.The control objective of this paper is to design the adaptive iterative learning controller to steer the outputyk(t)to follow the desired reference signalr(t).
De finer1(t)=r(t)andri+1(t)=Dαri(t),i=1,2,...,n-1.Then we can write the desired reference vector asxd(t)=[r1(t),r2(t),...,rn(t)]T.De fine the tracking errors asei,k(t)=xi,k(t)-ri(t),i=1,2,...,n.Then the tracking error vector can be given byek(t)=xk(t)-xd(t)=[e1,k(t),e2,k(t),...,en,k(t)]T.In the rest of this paper,the denotationtwill be omitted when no confusion arises.
Choose the sliding surface ases,k= £ΛT1⁄ek,where Λ=[λ1,λ2,...,λn-1]Tandλ1,...,λn-1are chosen suitably such that the eigenvalues of the matrixBsatisfy condition of Lemma 1,where the matrixBis given by
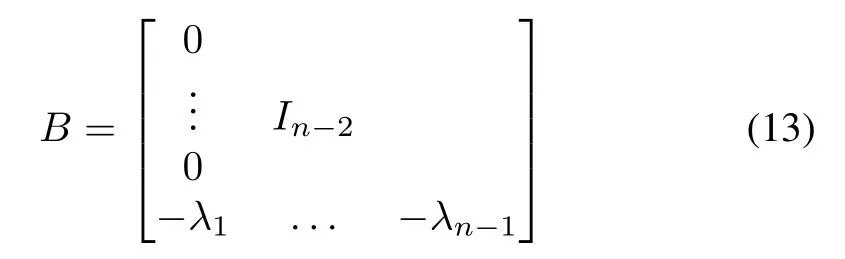
withIn-2as unit matrix ofn-2 dimensions.Then keeping the systems errors on this surface leads to the asymptotic stability of error systems and therefore output tracking of the desired reference signal.
To facilitate control system design,the following reasonable assumptions are made.
Assumption1:The unknown external disturbance is bounded.
Assumption 2:The desired state trajectoryxd(t)is continuous,bounded and available.
Assumption 3:The initial state errorsei,k(0)at each iteration are not necessarily zero,small and fixed,but assumed to be bounded.
C.RBF Neural Networks
In control engineering,two types of artificial neural networks are usually used to approximate unknown smooth functions,which specifically are linearly parameterized neural networks(LPNNs)and multilayer neural networks(MNNs).As a kind of LPNNs,the radial basis function(RBF)neural network(NN)[58]is usually used as a tool to model unknown nonlinear functions owing to its nice approximation capabilities.The RBF NN can be seen as a two-layer network in which hidden layer performs a fixed nonlinear transformation with no adjustable parameters,i.e.,the input space is mapped into a new space.The output layer then combines the outputs in the latter space linearly.Generally,the RBF NN approximates the continuous functionQ(Z):Rq→R as follows

whereZ∈ΩZ⊂Rqis the input vector,W=[w1,w2,...,wl]T∈Rlis the weight vector,the NN node numberl>1;andφ(Z)=[φ1(Z),...,φl(Z)]T,withφi(Z)as the commonly used Gaussian functions,i.e.,φi(Z)=whereµi=[µi1,µi2,...,µiq]is the center of the receptive field andσiis the width of the Gaussian function.It has been proven that iflis chosen sufficiently large,WTφ(Z)can approximate any continuous function,Q(Z),to any desired accuracy over a compact set ΩZ⊂Rqin the form ofQ(Z)=W∗Tφ(Z)+ε(Z),∀Z∈ΩZ⊂RqwhereW∗is the ideal constant weight vector,andε(Z)is the approximation error which is bounded over the compact set,i.e.,|ε(Z)|≤ε∗,∀Z∈ΩZ,whereε∗>0 is an unknown constant.The ideal weight vectorW∗is an artificial quantity required for analytical purposes.W∗is de fined as the value ofWthat minimizes|ε(Z)|for allZ∈ΩZ⊂Rq,i.e.,W∗:=argminW∈Rl{supZ∈ΩZ|h(Z)-WTφ(Z)|}.
III.AILC SCHEME DESIGN
According to the systems dynamic equation(10)and definition of tracking errors,we can have the dynamics of tracking error s

By taking the derivative of orderαof sliding surface,one has
According to Assumption 3,there exist known constantsεi,such that,|ei,k(0)|≤εi,i=1,2,...,nfor anyk∈N.In order to overcome the uncertainty from initial resetting errors,we define a novel boundary layer function by employing Mittag-Leffler function

Remark 2:As the boundary layer function[13]-[15]in integer order case,η(t)has property of decreasing along time axis with initial conditionη(0)=ε.Moreover,it is clear thatDαη(t)=εDαEα(-Kt)=-KεEα(-Kt)=-Kη(t).
Then we can de fine an auxiliary error signal as

where sat(·)is the saturation function which is de fined as
Subsequently,it can be easily obtained that
which implies thatsk(0)=esk(0)-η(0)esk(0)/η(0)=0 is satisfied for allk∈N.Moreover,there exists the fact that
To overcome the design difficulty from uncertaintyf(xk(t)),we employ radial basis function neural network to approximatef(xk(t))in the form of

From Lemma 2,we can obtain the equivalent continuous frequency distributed model of dynamical system ofsk

with weighting functionµ(ω)=sin(απ)/(πωα),zk(ω,t)∈R is the true error variable.
De fine a smooth scalar positive function as

The time derivative ofVs,k(t)can be expressed as

Then we can determine the control law as

Lemma 3[59]:For any Δk>0 andx∈R,the inequality|x|-xtanh(x/Δk)≤γΔkis established,whereγis a positive constant andγ=e-(γ+1)orγ=0.2785.
Lemma 4[60]:
The adaptive learning laws for unknown parameters are designed as

where ΓW∈Rl×lis a positive square matrix andqθ,qρ>0 are design parameters.In the following parts,we de fine the estimation error of Θ(t)as(t)=k(t)-Θ(t)where Θ(t)denotesW∗,θ(t)andρ.
Substituting the controller(26)back into(24)yields
From adaptive updating laws(27)and(29)it follows

According to Lemma 2,we can obtain the distributed frequency model of(31)and(32)as follows
wherezW,k(ω,t)∈Rlandzρ,k(ω,t)∈R are the true estimation error variables.
De fine a positive scalar positive function of parameter estimation errors as
Taking the time derivative ofVp,k(t)results in
De fine a Lyapunov candidate asVk(t)=Vs,k(t)+Vp,k(t).Hence,we can obtain the derivative ofVk(t)with respect to time by combining(30)and(36)

IV.ANALYSIS OF STABILITY AND CONVERGENCE
In this section,we will prove that the controller can guarantee the stability of the closed-loop system and the convergence of tracking errors.
The stability of the proposed AILC scheme is summarized as follows.
Theorem 1:Considering the fractional order system(12),and designing adaptive iterative learning controller(26)with parameter adaptive learning algorithms(27)-(29),the following properties can be guaranteed:1)all the signals of the closed-loop system are bounded;2)the pseudo error variablesk(t)converges to zero ask→∞,i.e.,Proof:De fine the Lyapunov-like CEF as

The proof includes four parts.
1)Difference of Ek(t)
Compute the difference ofEk(t),which is
Considering(37),one has
Utilizing the algebraic relationand taking the adaptive learning laws(28)into consideration,we have

Substituting(40)and(41)back into(39),it follows that

Lett=Tin(42).From the adaptive parameter updating laws we knowVp,k(0)=Vp,k-1(T).Therefore,it follows from(42)that

2)Finiteness of Ek(T)
According to(38),we know

Recalling adaptive updating law(28),we can have(t)=qθs1(t)ξ(x1),which leads to time derivative ofE1(t)as follows

According to the adaptive updating laws it is clear thatE1(0)=Vp,1(0),which is determined byW∗andρ.Thus the boundedness ofE1(t)can be ensured since Lettingt=Tin(47),we can obtain the boundedness ofE1(T)


Applying(43)repeatedly,we may have

Recalling Lemma 4 we have

which further implies the boundedness ofEk(T).
3)Finiteness of Ek(t)
Next we will prove the boundedness ofEk(t)by induction.The boundedness ofEk(T)is guaranteed for all iterations.Consequently,∀k∈N,there exists a constantM1satisfyingthus it follows
On the other hand,from(42),we obtain


Adding(51)to(50)leads to

As we have proven thatE1(t)is bounded,thereforeEk(t)is finite by induction.In the sequel,we can obtain the boundedness ofˆWk(t),ˆθk(t)andˆρk.
4)Learning Convergence Property
Rewrite inequality(49)as
Taking the limitation of(53),it follows that
According to the convergence theorem of the sum of series,Sincexdis bounded,the boundedness ofxkis established.Based on the above reasoning,we can arrive at thatuk(t)is bounded.
V.SIMULATION STUDY
In this section,a simulation study is presented to verify the effectiveness of the AILC scheme.Consider the following second-order nonlinear fractional order system:
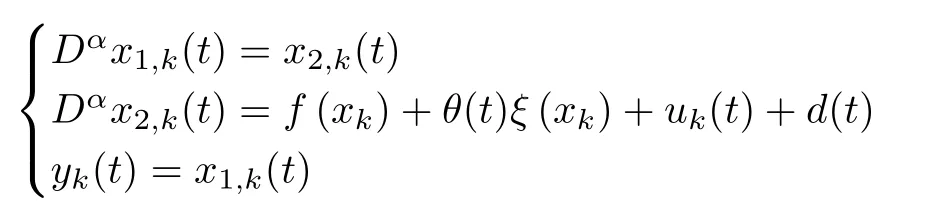
whereα=0.9,f(xk)=-x1,kx2,ksin(x1,kx2,k),θ(t)=1+0.5sint,ξ(xk)=sin(x1,k)cos(x2,k),d(t)=0.1×rand×sin(t)withrandpresenting a Gaussian white noise.The desired reference trajectory is given byr(t)=sint.The design parameters are chosen asε1=ε2=1,λ=2,K=6,ΓW=diag{0.6},qθ=2,qρ=0.8,ε=λε1+ε2=3.It is clear that|λ|>(απ)/2.Additionally,the boundary layer function is specified byη(t)=3E0.9(-Kt),a graphic representation ofη(t)is shown in Fig.2.
The parameters for neural network are chosen asl=30,µj=(1/l)(2j-l)[2,3],σj=2,j=1,2,...,l.The initial conditionx1,k(0)andx2,k(0)are randomly taken asr(0)+0.5(1-2rand)andr1(0)+0.5(1-2rand),respectively.For ease of programming,we use the Gr¨unwald-Letnikov definition in the simulation.The system runs on[0,2π]repeatedly.Parts of the simulation results are shown in Figs.3-7.

Fig.2. Mittag-Leffler type boundary layer function η(t).

Fig.3. System output yk(t)on r(t)(k=1).
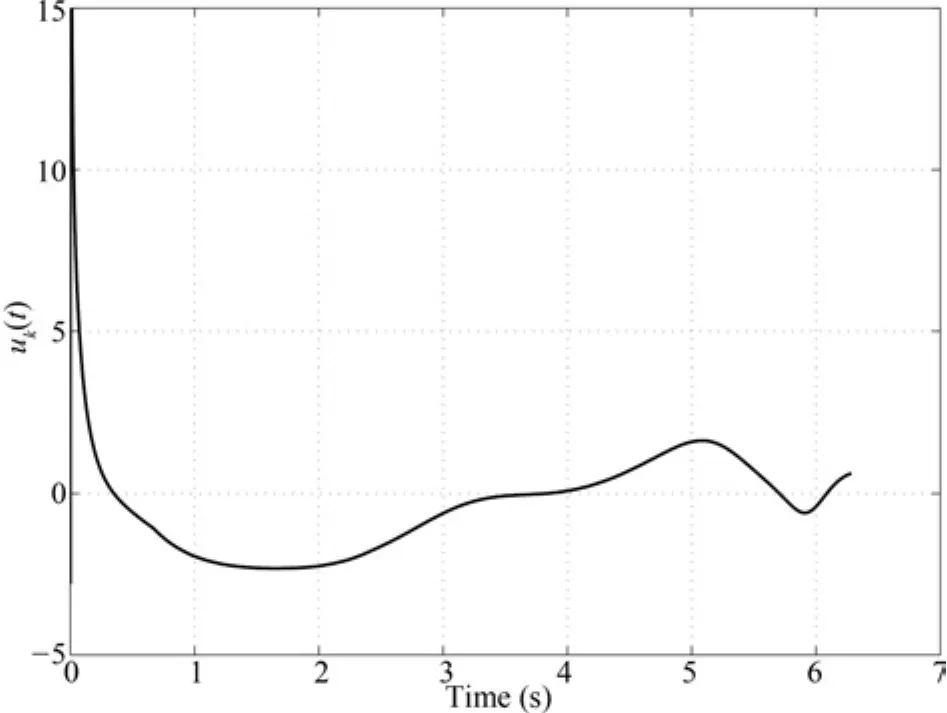
Fig.4. Control input(k=1).
Figs.3 and 4,and Figs.5 and 6 show the output tracking trajectory and control input of the 1st and the 30th iteration.Obviously,the signals are bounded and the tracking per for-mance of the 1st iteration is much worse than that of the 30th.Fig.7 gives the convergence ofalong the iteration axis,which indicates that the proposed AILC scheme achieves perfect tracking by learning.
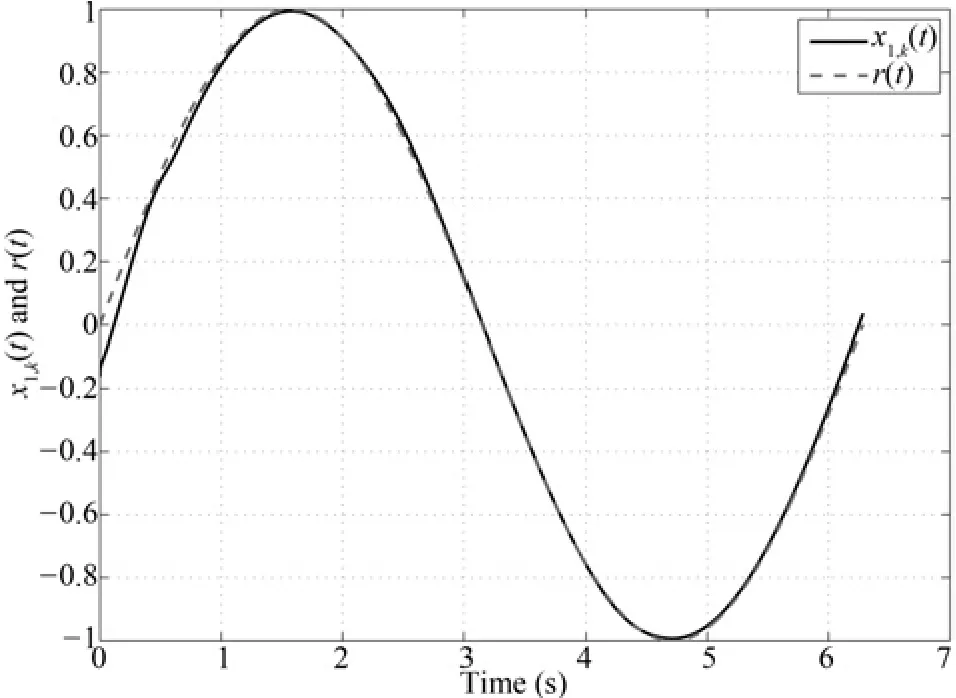
Fig.5. System output yk(t)on r(t)(k=30).

Fig.6. Control input(k=30).

Fig.7. t versus the number of iterations.
VI.CONCLUSIONS
In this paper,an adaptive iterative learning control scheme has been presented for a class of nonlinear fractional order systems in the presence of disturbance.A new boundary layer function by introducing Mittag-Leffler function is designed to deal with the initial condition problem of ILC.RBF NN is utilized to approximate the system uncertainty while fractional order differential type updating laws are designed to estimate ideal neural weight and the upper bound of neural approximation error and disturbance.The hyperbolic tangent function with a convergent series sequence is employed to form the robust control term.Theoretical analysis by constructing Lyapunov-like CEF has been presented to show the boundedness of all signals and convergence along iteration of tracking error.Simulation results have been provided to show the validity the proposed scheme.This is the first time consideration of the AILC problem of fractional order system.Compared with traditional ILC of fractional systems,our AILC scheme relaxes the global Lipschitz condition and a new framework of stability analysis by using Lyapunov-like CEF is presented.Although we only consider the class of nonlinear fractional order systems as(12),the idea of the proposed AILC method can be applied to more kinds of fractional order systems and provide a reference for AILC design of fractional order systems.
[1]S.Arimoto,S.Kawamura,and F.Miyazaki,“Bettering operation of robots by learning,”J.Robot.Syst.,vol.1,no.2,pp.123-140,Jun.1984.
[2]T.Y.Kuc,K.Nam,and J.S.Lee,“An iterative learning control of robot manipulators,”IEEE Trans.Robot.Automat.,vol.7,no.6,pp.835-841,Dec.1991.
[3]Y.Q.Chen and C.Y.Wen,Iterative Learning Control:Convergence,Robustness and Applications.London:Spring-Verlag,1999.
[4]Z.Bien and J.X.Xu,Iterative Learning Control:Analysis,Design,Integration and Applications.Boston,USA:Kluwer Academic Publisher,1998.
[5]J.X.Xu and Y.Tan,Linear and Nonlinear Iterative Learning Control.Berlin:Springer-Verlag,2003.
[6]J.X.Xu and Z.H.Qu,“Robust iterative learning control for a class of nonlinear systems,”Automatica,vol.34,no.8,pp.983-988,Aug.1998.
[7]M.French and E.Rogers,“Non-linear iterative learning by an adaptive Lyapunov technique,”Int.J.Control,vol.73,no.10,pp.840-850,Nov.2000.
[8]J.X.Xu and Y.Tan,“A composite energy function-based learning control approach for nonlinear systems with time-varying parametric uncertainties,”IEEE Trans.Automat.Control,vol.47,no.11,pp.1940-1945,Nov.2002.
[9]R.H.Chi,Z.S.Hou,and J.X.Xu,“Adaptive ILC for a class of discrete-time systems with iteration-varying trajectory and random initial condition,”Automatica,vol.44,no.8,pp.2207-2213,Aug.2008.
[10]R.H.Chi,S.L.Sui,and Z.S.Hou,“A new discrete-time adaptive ILC for nonlinear systems with time-varying parametric uncertainties,”Acta Automat.Sinica,vol.34,no.7,pp.805-808,Jul.2008.
[11]C.K.Yin,J.X.Xu,and Z.S.Hou,“An ILC scheme for a class of nonlinear continuous-time systems with time-iteration-varying parameters subject to second-order internal model,”Asian J.Control,vol.13,no.1,pp.126-135,Jan.2011.
[12]R.K.Zhang,Z.S.Hou,R.H.Chi,and H.H.Ji,“Adaptive iterative learning control for nonlinearly parameterised systems with unknown time-varying delays and input saturations,”Int.J.Control,vol.88,no.6,pp.1133-1141,Jun.2015.
[13]Y.C.Wang,C.J.Chien,and C.C.Teng,“Direct adaptive iterative learning control of nonlinear systems using an output-recurrent fuzzy neural network,”IEEE Trans.Syst.Man Cybern.B:Cybern.,vol.34,no.3,pp.1348-1359,Jun.2004.
[14]C.J.Chien,“A combined adaptive law for fuzzy iterative learning control of nonlinear systems with varying control tasks,”IEEE Trans.Fuzzy Syst.,vol.16,no.1,pp.40-51,Feb.2008.
[15]Y.C.Wang and C.J.Chien,“Decentralized adaptive fuzzy neural iterative learning control for nonaf fine nonlinear interconnected systems,”Asian J.Control,vol.13,no.1,pp.94-106,Jan.2011.
[16]C.L.Zhang and J.M.Li,“Adaptive iterative learning control for nonlinear pure-feedback systems with initial state error based on fuzzy approximation,”J.Franklin Inst.,vol.351,no.3,pp.1483-1500,Mar.2014.
[17]I.Podlubny,Fractional Differential Equations:an Introduction to Fractional Derivatives,Fractional Differential Equations,Some Methods of Their Solution and Some of Their Applications.New York:Academic Press,1999.
[18]I.Petr´aˇs,Fractional-Order Nonlinear Systems:Modeling,Analysis and Simulation.Berlin:Spring-Verlag,2011.
[19]J.D.Gabano and T.Poinot,“Fractional modelling and identification of thermal systems,”Signal Process.,vol.91,no.3,pp.531-541,Mar.2011.
[20]Y.Luo and Y.Q.Chen,“Stabilizing and robust fractional order PI controller synthesis for first order plus time delay systems,”Automatica,vol.48,no.9,pp.2159-2167,Sep.2012.
[21]M.¨O.Efe,“Fractional fuzzy adaptive sliding-mode control of a 2-DOF direct-drive robot arm,”IEEE Trans.Syst.Man Cybern.B:Cybern.,vol.38,no.6,pp.1561-1570,Dec.2008.
[22]H.Delavari,R.Ghaderi,A.Ranjbar,and S.Momani,“Fuzzy fractional order sliding mode controller for nonlinear systems,”Commun.Nonlinear Sci.Numer.Simulat.,vol.15,no.4,pp.963-978,Apr.2010.
[23]J.Li,J.G.Lu,and Y.Q.Chen,“Robust decentralized control of perturbed fractional-order linear interconnected systems,”Comput.Math.Appl.,vol.66,no.5,pp.844-859,Sep.2013.
[24]X.D.Tang,G.Tao,and S.M.Joshi,“Adaptive actuator failure compensation for parametric strict feedback systems and an aircraft application,”Automatica,vol.39,no.11,pp.1975-1982,Nov.2003.
[25]X.S.Wang,C.Y.Su,and H.Hong,“Robust adaptive control of a class of nonlinear systems with unknown dead-zone,”Automatica,vol.40,no.3,pp.407-413,Mar.2004.
[26]T.P.Zhang and S.S.Ge,“Adaptive neural control of MIMO nonlinear state time-varying delay systems with unknown dead-zones and gain signs,”Automatica,vol.43,no.6,pp.1021-1033,Jun.2007.
[27]T.P.Zhang and S.S.Ge,“Adaptive dynamic surface control of nonlinear systems with unknown dead zone in pure feedback form,”Automatica,vol.44,no.7,pp.1895-1903,Jul.2008.
[28]J.X.Xu,J.Xu,and T.H.Lee,“Iterative learning control for systems with input deadzone,”IEEE Trans.Automatic Control,vol.50,no.9,pp.1455-1459,Sep.2005.
[29]A.Razminia and D.F.M.Torres,“Control of a novel chaotic fractional order system using a state feedback technique,”Mechatronics,vol.23,no.7,pp.755-763,Oct.2013.
[30]C.L.Li,K.L.Su,J.Zhang,and D.Q.Wei,“Robust control for fractional-order four-wing hyperchaotic system using LMI,”Optik,vol.124,no.22,pp.5807-5810,Nov.2013.
[31]C.Yin,S.Dadras,S.M.Zhong,and Y.Q.Chen,“Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach,”Appl.Math.Modell.,vol.37,no.4,pp.2469-2483,Feb.2013.
[32]C.C.Yang and C.J.Ou,“Adaptive terminal sliding mode control subject to input nonlinearity for synchronization of chaotic gyros,”Commun.Nonlinear Sci.Numer.Simulat.,vol.18,no.3,pp.682-691,Mar.2013.
[33]X.Huang,Z.Wang,Y.X.Li,and J.W.Lu,“Design of fuzzy state feedback controller for robust stabilization of uncertain fractional-order chaotic systems,”J.Franklin Inst.,vol.351,no.12,pp.5480-5493,Dec.2014.
[34]I.Pan,S.Das,and S.Das,“Multi-objective active control policy design for commensurate and incommensurate fractional order chaotic financial systems,”Appl.Math.Modell.,vol.39,no.2,pp.500-514,Jan.2015.
[35]S.Bhalekar and V.Daftardar-Gejji,“Synchronization of different fractional order chaotic systems using active control,”Commun.Nonlinear Sci.Numer.Simulat.,vol.15,no.11,pp.3536-3546,Nov.2010.
[36]T.Z.Li,Y.Wang,and Y.Yang,“Designing synchronization schemes for fractional-order chaotic system via a single state fractional-order controller,”Optik,vol.125,no.22,pp.6700-6705,Nov.2014.
[37]S.K.Agrawal and S.Das,“Function projective synchronization between four dimensional chaotic systems with uncertain parameters using modi fied adaptive control method,”J.Process Contr.,vol.24,no.5,pp.517-530,May 2014.
[38]L.K.Gao,Z.H.Wang,K.Zhou,W.J.Zhu,Z.D.Wu,and T.D.Ma,“Modified sliding mode synchronization of typical three-dimensional fractional-order chaotic systems,”Neurocomputing,vol.166,pp.53-58,Oct.2015.
[39]Y.Gao,C.H.Liang,Q.Q.Wu,and H.Y.Yuan,“A new fractionalorder hyperchaotic system and its modified projective synchronization,”Chaos Soliton.Fract.,vol.76,pp.190-204,Jul.2015.
[40]Y.Q.Chen and K.L.Moore,“OnDα-type iterative learning control,”inProc.40th IEEE Conference on Decision and Control,Orlando,Florida,USA,2001.pp.4451-4456.
[41]H.S.Ahn,K.L.Moore,and Y.Q.Chen,“Stability analysis of discretetime iterative learning control systems with interval uncertainty,”Automatica,vol.43,no.5,pp.892-902,May 2007.
[42]Y.Li,Y.Q.Chen,and H.S.Ahn,“Fractional order iterative learning control,”inICROS-SICE International Joint Conference 2009,Fukuoka,Japan,pp.3106-3110,2009.
[43]H.S.Li,J.C.Huang,D.Liu,J.H.Zhang,and F.L.Teng,“Design of fractional order iterative learning control on frequency domain,”inProc.2011 IEEE International Conference on Mechatronics and Automation,Beijing,China,pp.2056-2060,2011.
[44]Y.Li,Y.Q.Chen,and H.S.Ahn,“A generalized fractional-order iterative learning control,”inProc.50th IEEE Conference on Decision and Control and European Control Conference(CDC-ECC),Orlando,USA,pp.5356-5361,2011.
[45]Y.Li,Y.Q.Chen,and H.S.Ahn,“On thePDα-type iterative learning control for the fractional-order nonlinear systems,”inProc.2011 American Control Conference,San Francisco,CA,USA,pp.4320-4325,2011.
[46]Y.H.Lan,“Iterative learning control with initial state learning for fractional order nonlinear systems,”Comput.Math.Appl.,vol.64,no.10,pp.3210-3216,Nov.2012.
[47]Y.Li,Y.Q.Chen,and H.S.Ahn,“On P-type fractional order iterative learning identification,”inProc.13th International Conference on Control,Automation and Systems,Gwangju,Korea,2013.pp.219-225.
[48]Y.H.Lan and Y.Zhou,“Dαtype iterative learning control for fractionalorder linear time-delay systems,”Asian J.Control,vol.15,no.3,pp.669-677,2013.
[49]Y.Li,L.Zhai,Y.Q.Chen,and H.S.Ahn,“Fractional-order iterative learning control and identification for fractional-order Hammerstein system,”inProc.11th World Congress on Intelligent Control and Automation,Shenyang,China,pp.840-845,2014.
[50]Y.Li,Y.Q.Chen,and H.S.Ahn,“Fractional order iterative learning control for fractional order system with unknown initialization,”inProceedings of the 2014 American Control Conference(ACC),Portland,Oregon,USA,pp.5712-5717,2014.
[51]Y.Li,Y.Q.Chen,and H.S.Ahn,“A high-gain adaptive fractional-order iterative learning control,”inProc.11th IEEE International Conference on Control&Automation(ICCA),Taiwan,China,pp.1150-1155,2014.
[52]M.Lazarevi´c and P.Mandi´c,“Feedback-feed forward iterative learning control for fractional order uncertain time delay system-PDαtype,”inProc.2014 International Conference on Fractional Differentiation and Its Applications(ICFDA),Catania,Italy,pp.1-6,2014.
[53]L.Yan and J.Wei,“Fractional order nonlinear systems with delay in iterative learning control,”Appl.Math.Comput.,vol.257,pp.546-552,Apr.2015.
[54]A.A.Kilbas,H.M.Srivastava,and J.J.Trujillo,Theory and Applications of Fractional Differential Equations.The Netherlands:Elsevier,pp.69-83,2006.
[55]D.Matignon,“Stability results for fractional differential equations with applications to control processing,”inComputational Engineering in Systems and Applications,Lille,France,pp.963-968,1996.
[56]J.Sabatier,M.Moze,and C.Farges,“LMI stability conditions for fractional order systems,”Comput.Math.Appl.,vol.59,no.5,pp.1594-1609,Mar.2010.
[57]J.C.Trigeassou,N.Maamri,and A.Oustaloup,“Lyapunov stability of linear fractional systems:part 1-de finition of fractional energy,”inASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference,Portland,Oregon,USA,2013.
[58]M.M.Gupta and D.H.Rao,Neuro-Control Systems:Theory and Applications.New York,USA:IEEE Press,1994.
[59]M.M.Polycarpou,“Stable adaptive neural control scheme for nonlinear systems,”IEEE Trans.Automatic Control,vol.41,no.3,pp.447-451,Mar.1996.
[60]S.Zhu,M.X.Sun,and X.X.He,“Iterative learning control of strictfeedback nonlinear time-varying systems,”Acta Automat.Sinica,vol.36,no.3,pp.454-458,Mar.2010.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Decomposition Methods for Manufacturing System Scheduling:A Survey
- Nonlinear Bayesian Estimation:From Kalman Filtering to a Broader Horizon
- Vehicle Dynamic State Estimation:State of the Art Schemes and Perspectives
- Coordinated Control Architecture for Motion Management in ADAS Systems
- An Online Fault Detection Model and Strategies Based on SVM-Grid in Clouds
- An Adaptive RBF Neural Network Control Method for a Class of Nonlinear Systems