面向可靠性的可修和不可修系统的建模及其可靠性指标分析
2018-04-28陈楠楠马瑞宏阿荣
陈楠楠 马瑞宏 阿荣
摘 要:针对可修和不可修系统,本文研究其可靠性指标,在可修复系统建模的基础上探讨了不可修复系统的建模和指标计算,定义并求解了不可修复系统的可靠性函数、失效概率密度函数、失效率和平均失效时间。通过对其系统可靠性指标的计算分析,可以进一步提高系统性能,为优化系统做出决策依据。最后运用龙格库塔方法展示了具体系统的指标求解过程。
关键词:可修复系统;不可修复系统;可靠性指标
中图分类号:O213.2 文献标识码:A 文章编号:
引言
可修复系统,顾名思义就是通过维修之后,能恢复功能继续工作的系统。对于可修复系统,主要是维修的速度,以及从发生故障到恢复到正常所用时间是考虑的重点,尽量要求它可靠的不停的工作,即使偶尔故障,停机时间也很短。而不可修复系统是指系统或组成单元一旦发生故障,不再修复。而不再修复的原因有多种,例如技术上达不到或经济方面的考虑。对于可不修复系统,要在设计初期考虑其可靠性,使之不发生故障或者有很低的几率发生故障。
本文首先介绍了可修复系统和不可修复系统的概念,其次基于连续时间的Markov对其进行建模,然后进行可靠性指标分析,最后给出具体数值算例,展示指标求解过程。
一、可修复系统建模
可修复系统,即当元件失效时,可以对其元件进行修复使其正常运行。通常有以下几条假设[3]:
1、开始时,所有元件都是新的,并且只有一个修理工人来修理损坏的元件。失效元件在被修复之后,就和新的一样。在同一时间内,不会有两个或以上的元件同时失效。当系统失效时,没有失效的元件将不会再失效;
2、只要元件失效,那么修理工人就必须第一时间来修理损坏的元件。在失效元件修理期间,其他元件也有可能失效;
3、对于系统处于工作时的失效元件,维修工人遵循先失效的元件有优先修理权;
4、系统失效时,修理工人优先修理关键元件;
5、元件工作时间和维修时间服从均值分别为和的指数分布。
下面基于系统签名档的方法进行建模分析,根据前人对可修复系统的建模,在时刻的系统状态可定义为:
其中,表示让系统仍然处于工作状态的失效元件数的最大值,表示让系统处于失效状态的失效元件数的最小值。基于上面提到的假设条件下,是连续时间的时齐的马尔科夫过程,其转移状态集合为。令为工作状态集合,为失效状态集合。
过程的转移概率定义为:
⑴
令表示系统处于状态时的所有情况数,即系统中包含有个失效元件(个工作)的路集数。所以有
⑵
其中是系统Signature向量的第个分量,表示个元件的寿命按从小到大排列后,在所有可能的排序中第个元件失效导致系统失效的概率。
通过推导可得该马尔科夫过程的状态转移概率矩阵:
⑶
当时,有
⑷
当时,有
⑸
对且,定义转移速率矩阵:
⑹
其中[4].
通过状态转移概率矩阵,进而可求得可靠性函数、失效概率密度函数、失效率和平均失效时间。
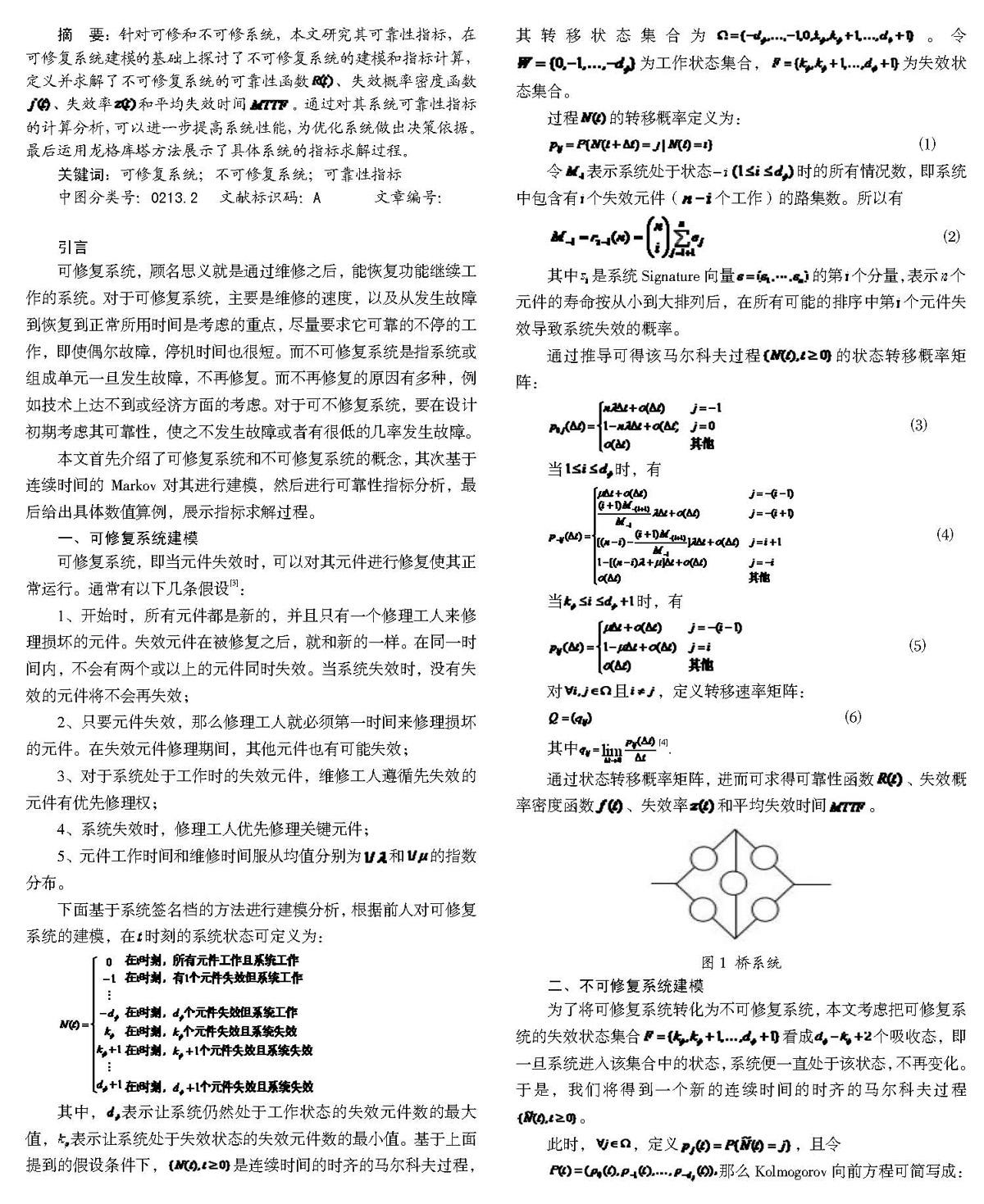
图1 桥系统
二、不可修复系统建模
为了将可修复系统转化为不可修复系统,本文考虑把可修复系统的失效状态集合看成个吸收态,即一旦系统进入该集合中的状态,系统便一直处于该状态,不再变化。于是,我们将得到一个新的连续时间的时齐的马尔科夫过程。
此时,,定义,且令
那么Kolmogorov向前方程可简写成:
⑺
其中是转移速率矩阵的前行列的子矩阵。
三、数值算例
如图1所示,考虑桥系统,其系统签名档为,状态集合,其中工作状态集合,失效状态集合,令、,根据式子(1)—(6),可得到当该桥系统可修复时的转移速率矩阵:
,
令失效状态集合F为吸收态,此时得到矩阵
.
那么Kolmogorov向前方程可写成:
.
此方程可以用Laplace变换去求解,但是本文用另一个相对简单的方法——龙格库塔方法来求解。此方法通过得到每一个离散时刻t时的目标函数值,刻画出目标函数值的曲线,从而直观地看到每一函数的变化趋势。最终结论如下:
13)可靠性随时间变化曲线图
从图2中可看出随时间变化,桥系统的可靠性开始是迅速下降,随着使用时间推移,可靠性逐渐趋于0,也就是说当时间足够长之后,该系统处于工作状态且从未失效过的概率为0。
图2 可靠性随时间变化曲线图
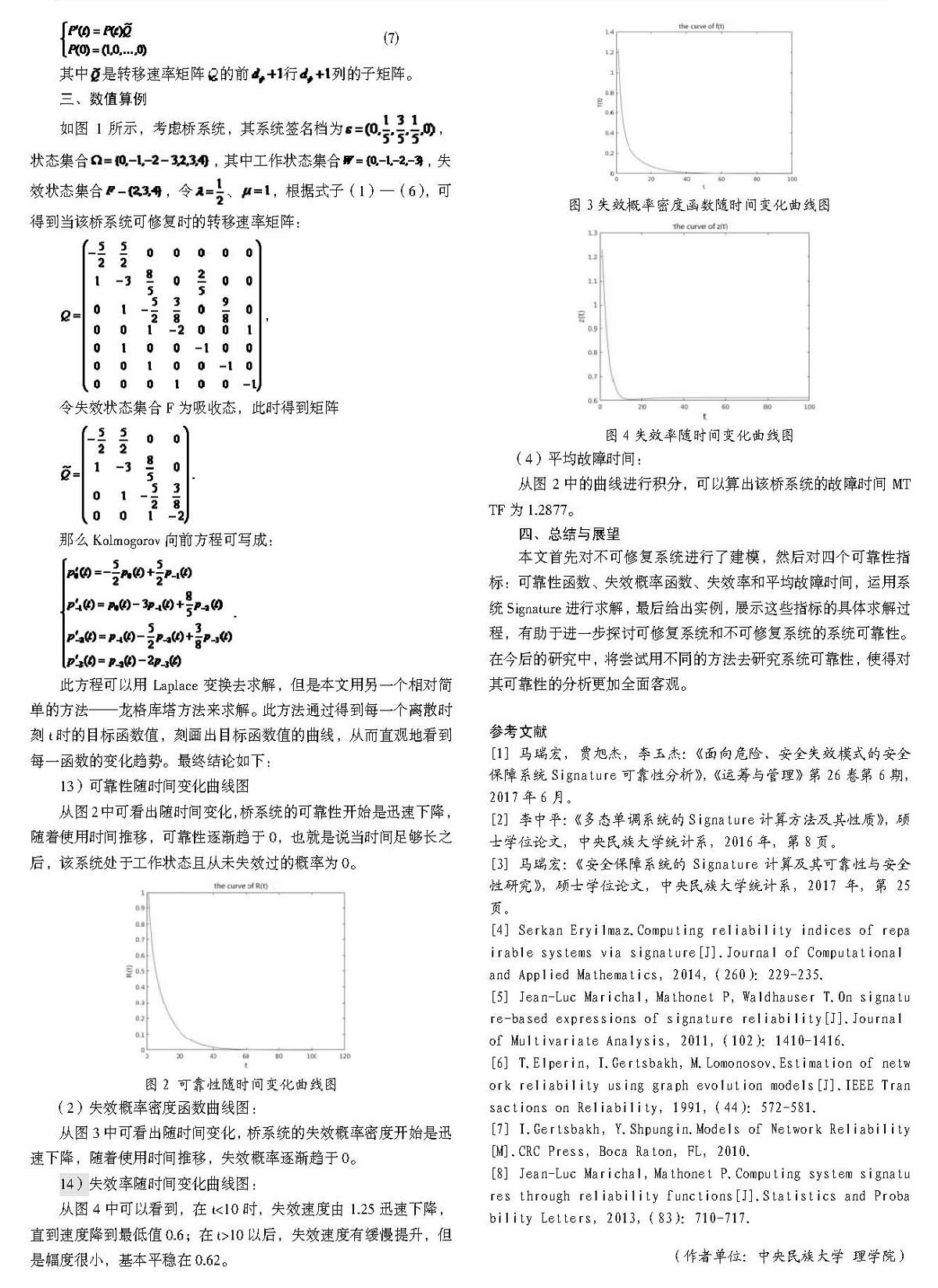
(2)失效概率密度函数曲线图:
从图3中可看出随时间变化,桥系统的失效概率密度开始是迅速下降,随着使用时间推移,失效概率逐渐趋于0。
14)失效率随时间变化曲线图:
从图4中可以看到,在t<10時,失效速度由1.25迅速下降,直到速度降到最低值0.6;在t>10以后,失效速度有缓慢提升,但是幅度很小,基本平稳在0.62。
图3失效概率密度函数随时间变化曲线图
图4失效率随时间变化曲线图
(4)平均故障时间:
从图2中的曲线进行积分,可以算出该桥系统的故障时间MTTF为1.2877。
四、总结与展望
本文首先对不可修复系统进行了建模,然后对四个可靠性指标:可靠性函数、失效概率函数、失效率和平均故障时间,运用系统Signature进行求解,最后给出实例,展示这些指标的具体求解过程,有助于进一步探讨可修复系统和不可修复系统的系统可靠性。在今后的研究中,将尝试用不同的方法去研究系统可靠性,使得对其可靠性的分析更加全面客观。
参考文献
[1] 马瑞宏,贾旭杰,李玉杰:《面向危险、安全失效模式的安全保障系统Signature可靠性分析》,《运筹与管理》第26卷第6期,2017年6月。
[2] 李中平:《多态单调系统的Signature计算方法及其性质》,硕士学位论文,中央民族大学统计系,2016年,第8页。
[3] 马瑞宏:《安全保障系统的Signature计算及其可靠性与安全性研究》,硕士学位论文,中央民族大学统计系,2017年,第25页。
[4] Serkan Eryilmaz.Computing reliability indices of repairable systems via signature[J].Journal of Computational and Applied Mathematics,2014,(260):229-235.
[5] Jean-Luc Marichal,Mathonet P,Waldhauser T.On signature-based expressions of signature reliability[J].Journal of Multivariate Analysis,2011,(102):1410-1416.
[6] T.Elperin,I.Gertsbakh,M.Lomonosov.Estimation of network reliability using graph evolution models[J].IEEE Transactions on Reliability,1991,(44):572-581.
[7] I.Gertsbakh,Y.Shpungin.Models of Network Reliability[M].CRC Press,Boca Raton,FL,2010.
[8] Jean-Luc Marichal,Mathonet P.Computing system signatures through reliability functions[J].Statistics and Probability Letters,2013,(83):710-717.
(作者單位:中央民族大学 理学院)
