伺服电动机装配之形位公差计算探讨
2018-04-27陈绪标
陈绪标 ,张 龙
(上海海立(集团)股份有限公司,上海 201206)
0 引 言
伺服电动机是目前比较流行的一款高档永磁同步电动机,因其自身振动小、噪声小、运行控制精度高、温升低、可靠性高而得到广泛应用。
因伺服电动机及其系统对其自身振动、噪声要求、运行控制精度等方面要求较高,故在伺服电动机结构设计、生产制造、装配调试等方面需对各电机各零部件尺寸及形位公差进行严格控制,这就涉及到伺服电动机尺寸公差/形位公差等整机计算。
一般电机厂在结构设计时仅对整机尺寸公差进行尺寸链计算,往往会忽略形位公差的尺寸链计算。
1 伺服电动机形位公差预计算的必要性
伺服电动机装配精度要求较高,在电机结构设计时需预计算伺服电动机各形位公差。一方面,能够校验各部品零部件设计的形位公差精度是否能满足电机整机形位公差精度要求,起到验证各部品形位公差是否设计合理的作用;另一方面,通过预计算各形位公差,并以形位公差预计算值范围为基准,对电机整机形位公差进行出厂检验控制,确保电机整机装配质量,即:如果出厂检测电机的实际整机形位公差不超过预计算值范围,则说明电机轴向气隙均匀,进而伺服电动机谐波及转矩波动小,有利于提高电机运行品质;如果实测的形位公差超过预计算值范围,则不利于提高电机的运行品质。
另外,从使用方的角度考虑,伺服电动机整机形位公差对伺服电动机所使用的设备系统装配及运行均有重要影响,整机形位公差的大小直接影响伺服电动机安装、运行质量以及使用寿命等。
故在伺服电动机结构设计时预计算整机装配形位公差十分必要。
2 伺服电动机基本结构简介
以某一款普通的1 kW伺服电动机为例,其内部基本结构如图1所示。
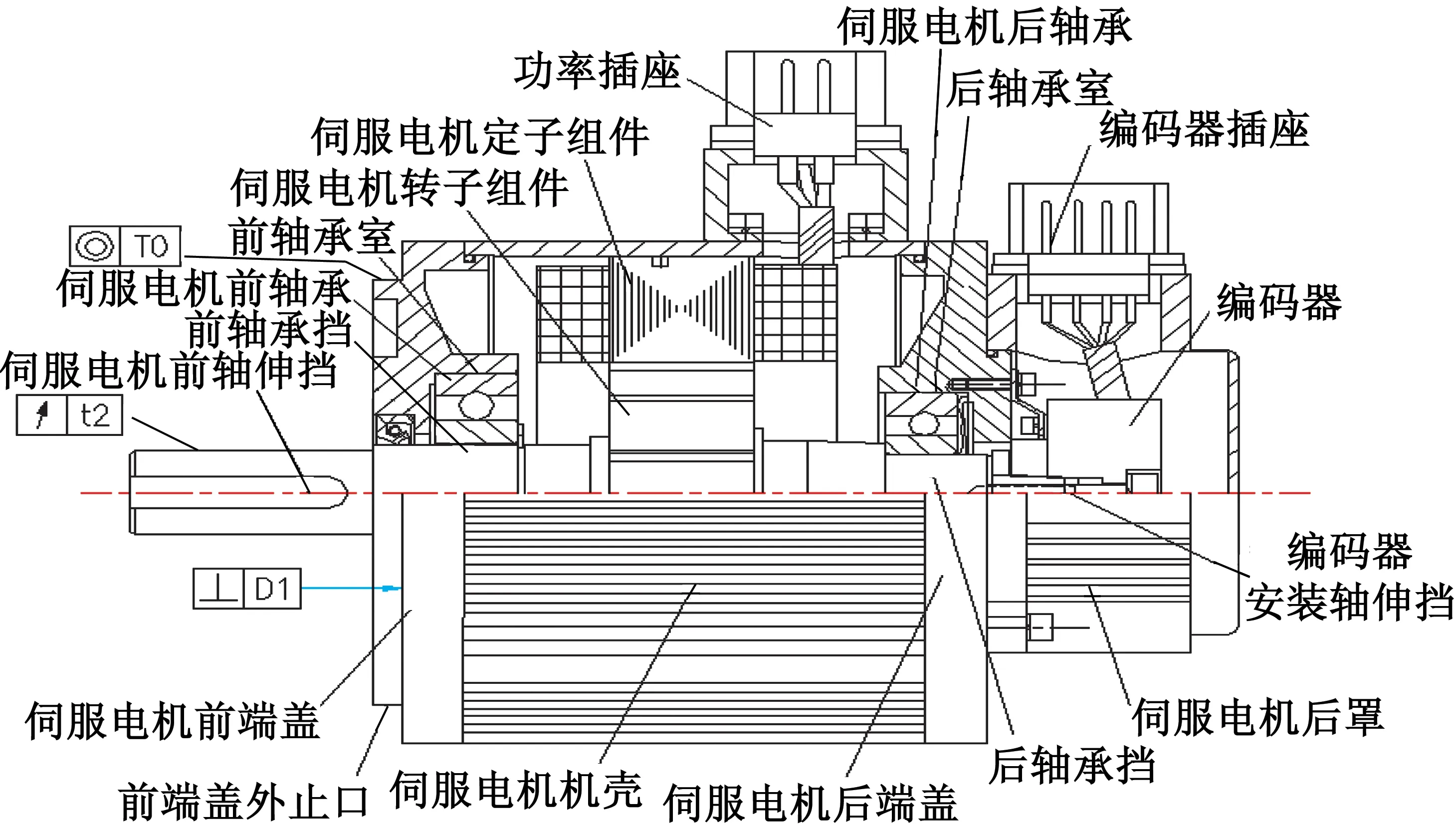
图1 普通伺服电动机内部结构
如图1所示,伺服电动机主要由如下零部件组成:伺服电动机定子、伺服电动机转子、伺服电动机前后端盖、伺服电动机直轴、伺服电动机壳体、伺服编码器后罩、伺服电动机编码器等部分组成。伺服电动机转子通过前后轴承安装于前后端盖上,前后端盖又通过伺服电动机壳体固定在伺服电动机定子的中心部位。此外,为了控制电机轴向窜动,并抑制伺服电动机运行噪声,在后轴承与后端盖之间增加了波形垫圈。
3 伺服电动机形位公差计算对象说明
如图1所示,伺服电动机形位公差计算对象,从国内客户的角度,并结合进口伺服电动机的外形尺寸要求,总结出伺服电动机形位公差计算组成部分如图2所示。其中,t2为伺服电机轴伸装配总跳动度;T0为伺服电机前端盖止口相对轴伸同轴度;D1为图1中的伺服电机前端盖端面相对轴伸垂直度。在伺服电动机整体结构设计中,需考虑上述各方面在图1、图2中出现的形位公差尺寸链的计算。
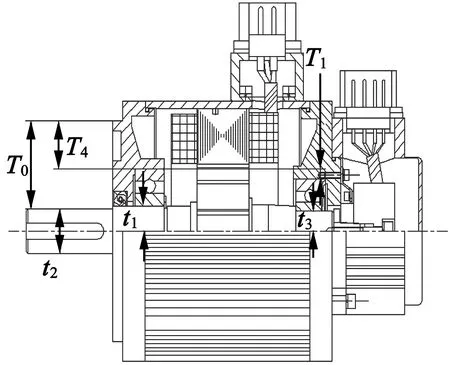
图2 伺服电动机前端盖同轴度T0图示尺寸
4 伺服电动机尺寸链典型计算循环图
根据伺服电动机基本结构,结合目前伺服电动机的安装特点,选择前端盖外止口同轴度T0(见图1)作为计算对象,将其作为伺服电动机形位公差尺寸链计算循环图的案例进行说明。
根据本文伺服电动机的结构,影响伺服电动机整机装配前端盖同轴度T0的主要因子如下:t1,T4,T1,t3,t2,具体组成结构框图如图2所示,尺寸链闭环如图3所示,且影响伺服电动机整机装配同轴度主要因子参数说明如表1所示。

图3 伺服电动机同轴度T0尺寸闭环图链
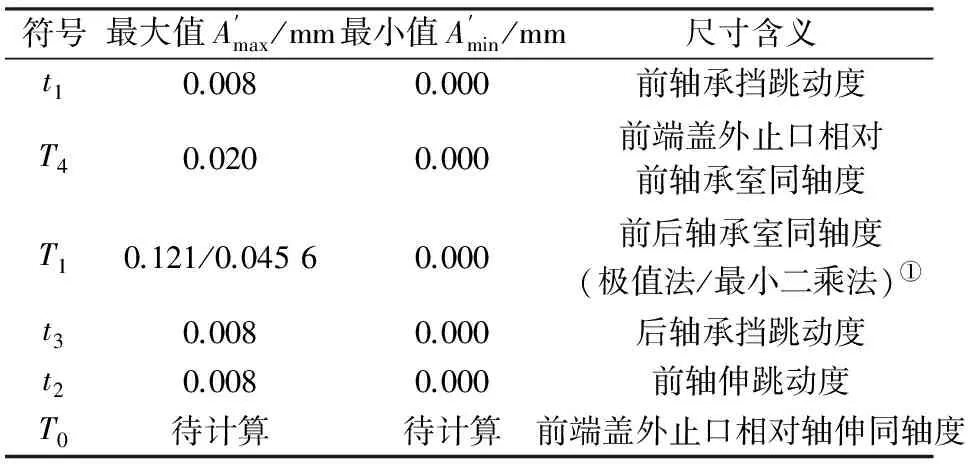
符号最大值A′max/mm最小值A′min/mm尺寸含义t10.0080.000前轴承挡跳动度T40.0200.000前端盖外止口相对前轴承室同轴度T10.121/0.04560.000前后轴承室同轴度(极值法/最小二乘法)①t30.0080.000后轴承挡跳动度t20.0080.000前轴伸跳动度T0待计算待计算前端盖外止口相对轴伸同轴度
注①:T1是指前后轴承室的同轴度值,也是通过尺寸链计算得来的,其中0.121为通过极值法计算得来的,0.045 6为通过最小二乘法计算得来的,在文章里未描写详细计算过程。
5 伺服电动机形位公差尺寸链计算方法
5.1 极值法
伺服电动机尺寸链传统计算方法为最大值与最大值、最小值与最小值的累加,通常称为极值法。根据图2及图3,得出前端盖同轴度T0的计算过程如下:
T0=t1max+T4max+T1max+t3max+t2max
(1)
式中,T1采用极值法,取值0.121。最终算得:
5.2 最小二乘法
5.2.1 定义
最小二乘法(又称最小平方法或概率法 )是一种数学优化方法,它通过最小化误差的平方和寻找数据的最佳函数匹配,利用最小二乘法可以简单地求得未知的数据,并且能使得这些求得的数据与实际数据之间的误差的平方和最小。
5.2.2 最小二乘法在尺寸链计算的应用
伺服电动机尺寸链的闭环计算可看成是一系列数字的优化计算,其计算过程也是求解理论计算值与实际数据的误差最小值。鉴于此,采用最小二乘法并在其基础上进行优化计算尺寸链也是一种可行的方法。
本文计算对象仍为伺服电动机前端盖同轴度T0,根据图2及图3,得出T0计算过程分别如下:
(2)
式中:T1也是计算值,其计算也应采用最小二乘法来计算[1],取0.045 6.最终算得:
6 实测对比
根据伺服电动机的装配步骤,并对各零部件进行筛选,将合格的伺服电动机各零部件进行随机装配,通过伺服电动机专用检测设备进行检测(高精度偏摆仪),具体检测结果如表2所示。
从实测数据看,最小二乘法计算的结果更接近实测值,极值法计算的结果与实测值偏差较大。
从上述数据看来,用最小二乘法来计算尺寸链公差较极值法误差更小。

表2 伺服电动机整机实测数据对比
7 结 语
综上所述,中高精度电机(不拘泥于伺服电动机)的整机装配后的形位公差是可以通过尺寸链闭环来计算得出的。
通常,我们往往习惯于极值法来计算尺寸链公差范围,但从上述分析计算及实测结果来看,极值法计算的结果范围远大于整机形位公差实测值,对于电机装配质量控制没有严格的保证;而最小二乘法则更接近于实测尺寸,其对电机装配的质量控制更有意义,故建议优先采用最小二乘法进行形位公差的计算。并将此计算结果作为电机形位公差的控制点加以控制,以便在批量化生产中提升高精度电机的装配质量。
[1] 张子忠,王铁成.微电机结构工艺学[M].哈尔滨:哈尔滨工业大学出版社,1997: 276-283.
[2] 胡志强.电机制造工艺学[M].北京:机械工业出版社,2011:221-223.
[3] 陈魁.应用概率统计[M].北京:清华大学出版社,2000:46-54,79-82.
[4] 周兰生.1FT5交流伺服电机装配尺寸链的建立[J].工程科技:2010,(4):151-152.