无刷双馈电机定子电压定向的矢量控制策略
2018-04-27段琦玮
段琦玮,刘 石,龙 腾
(1.华北电力大学,北京 102206;2.剑桥大学,英国 CB2 1TN)
0 引 言
风能是一种重要的可再生能源。近年来,有关风力发电的研究在世界上受到了非常广泛的关注。目前,风力发电是最主要的风能利用途径。由于具有较高的安全性、稳定性以及只需要较小容量的功率变换器件,双馈感应发电机(以下简称DFIG)广泛应用于风力发电系统中。DFIG的主要缺陷是由于存在电刷和滑环而使得维护成本增加[1]。无刷双馈电机(以下简称BDFM)由于没有电刷和滑环,同时还保留了DFIG只需要小容量功率变换器件的优点,被认为在海上风力发电等领域拥有广阔应用前景[2]。
目前,针对BDFM的控制策略的研究主要有: 功率绕组(以下简称PW)磁场定向矢量控制[3-5]、直接转矩控制[6]、间接转矩控制[7-8]、直接功率控制[9]等几种。其中,矢量控制是BDFM的控制领域中应用最广泛的控制方法。ZHOU D首先提出了转子磁链定向模型并应用到BDFM的控制中,此控制策略因为需要控制PW和控制绕组(以下简称CW)之间的相位角差导致控制算法比较复杂[10-13]。之后POZA和SHAO Shiyi分别提出了PW磁链定向的矢量控制策略,但是此控制策略性能受磁链位置角的观测精度影响很大[3-5,14]。剑桥大学的研究团队在2013年基于统一矢量模型的研究[15-19]提出了PW电压定向的矢量控制方法,但此控制方法无法实现无功功率的控制。
本文基于BDFM的统一矢量模型提出了PW电压定向的矢量控制策略,并给出了详细的理论推导过程。此控制策略可以实现转速和无功功率的解耦控制。之后基于一台极对数比为4∶1的无刷双馈样机进行了电机试验研究。试验结果表明了该控制系统可以实现转速和无功功率的单独控制,并且具有良好的鲁棒性,表明了此控制策略可以应用于风力发电系统中。
1 PW电压定向的统一矢量模型方程
BDFM PW电压定向的统一矢量模型方程如下[18]:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
式中:自由变量η和γ以及PW、CW和转子各变量的坐标定位角θs1,θs2,φr由下式给出:
(8)
式中:下标s1,s2,r分别为PW,CW和转子绕组的量;V,I,Λ,M,L分别为电压、电流、磁链、互感及自感矩阵矢量;ω,R,R,Ll,L,p分别为电压频率、电阻值、电阻矩阵、漏磁电感值、互感值、极对数;N为转子的同心回路数;Te为电机电磁转矩;ζ为两定子绕组A相轴线的机械位置角度差;上标“*”表示取变量的共轭;上标“t”表示取矩阵的转置;Re为取变量的实部[20]。θ1为PW电压位置角。
根据定子电压定向坐标系的原理可知:
(9)
(10)
由于PW直接连接电网,因此其幅值和频率可认为保持不变,即|Vs1|和ω1为定值。
2 矢量控制器设计
2.1 控制理论
2.1.1 转速的控制
由磁链方程式(4),式(5)和式(6)可得到定子和转子的电流矢量表达式:
(11)

式(11)进一步变形计算:
(12)







式(4), 式(5)和式(12)代入式(7)可得到电磁转矩Te的方程:
Te=GIm {Λs1Is1}
(13)
式(10)代入式(13)可得:
(14)
由式(14)可知,转矩可由PW的d轴电流单独控制。
由于转速可由电磁转矩直接控制[4],因此BDFM的转速可由Ids1直接控制。
2.1.2 无功功率的控制
BDFM无功功率的表达式如下式:
(15)
将式(9)代入式(15)得:
(16)
由式(16)可知,无功功率可由PW的q轴电流单独控制。
2.2 Is2表达式
由式(10),式(11)和式(12)可得:
[Gr-(Lr-Mr)Gi]
(17)
由式(17)可得:
(18)



式中:C1,C7,G3,Gc∈常数;C2,C3,C8,G4∈1×N阶常数矩阵;C6,G2,G7;Gi,Gr∈N×1阶常数矩阵;C4,C5;G1,G5,G6∈N×N阶常数矩阵。
2.3 Vs2表达式
由式(2),式(9)和式(12)可得:
(19)
因此由式(19)可得:
(20)

2.4 矢量控制系统
将式(18)和式(20)代入式(14)和式(26)得:
(21)

由式(21)可给出转速控制环和无功功率控制环,如图1所示。
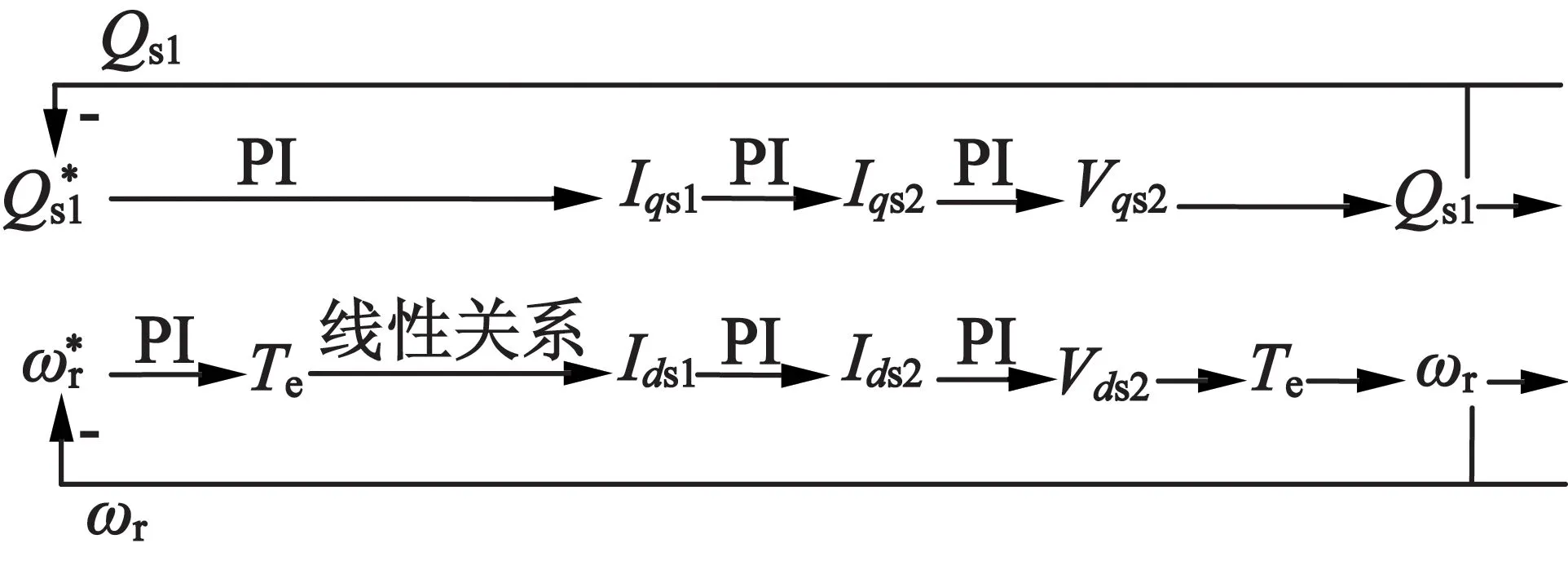
图1 转速和无功功率控制环
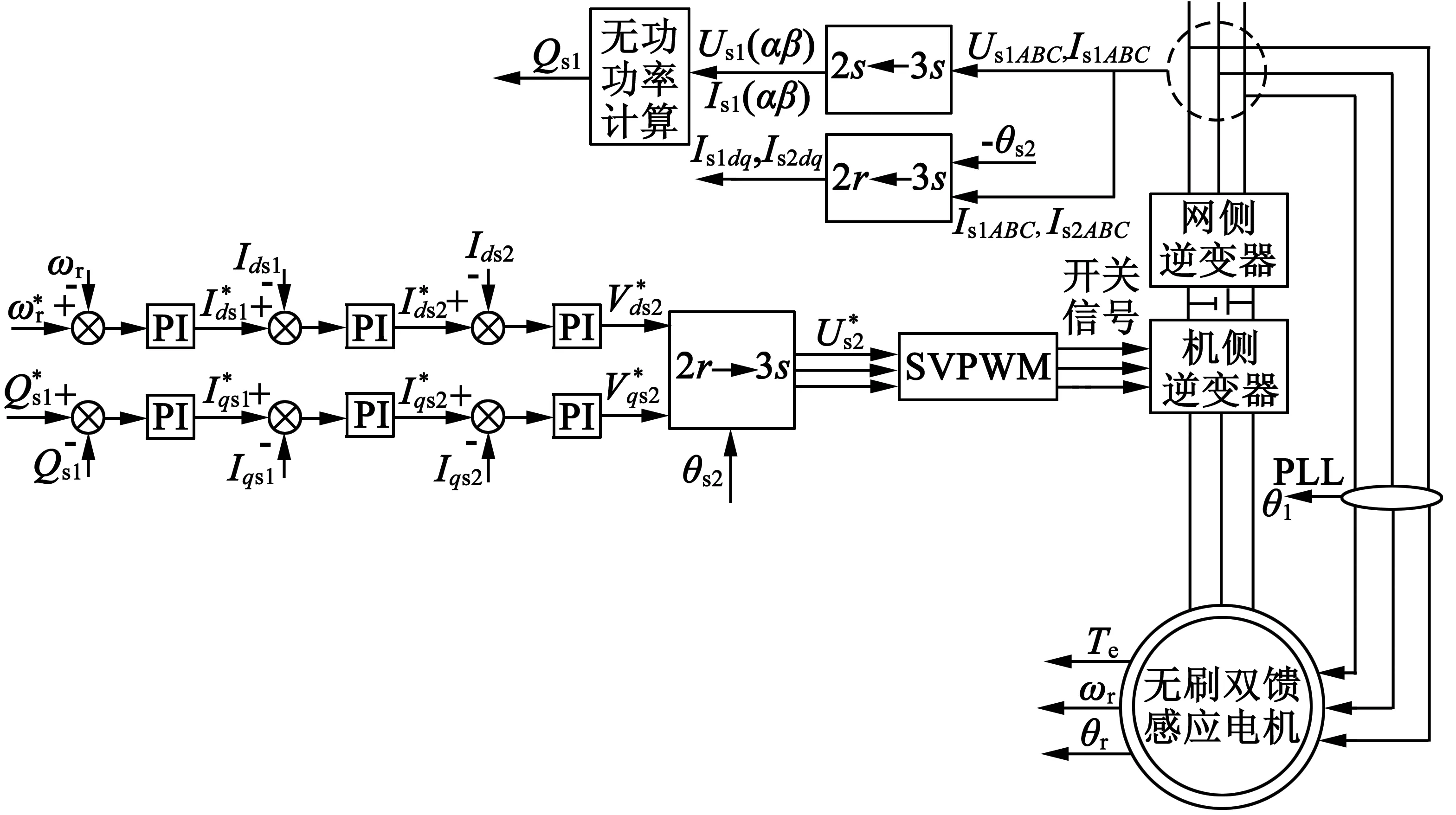
图2 PW电压定向的矢量控制系统框图
图2为BDFM PW电压定向的矢量控制系统框图。由转速和无功功率的参考值可以分别给定Vds2和Vqs2的参考值,然后通过SVPWM模块产生开关信号来控制CW侧的逆变器。要注意的是,转速环和无功功率环分别由d轴和q轴的电压和电流量控制,同之前的矢量控制方法不同[3-4,15,21]。
3 试验研究
为了验证所提出的矢量控制策略的性能,搭建了变频调速试验平台进行试验研究。试验样机的参数已在文献[20]中给出。试验所用控制器件为两块DSP控制板(TMS320F28335),分别控制网侧逆变器和机侧逆变器。一台直流电机跟BDFM样机通过联轴器连接以提供所需负载转矩。转速和转子位置角由增量式编码器测定。PW的电压位置角由锁相环(PLL)得到。
3.1 转速变化试验
图3为无功功率给定值为0,转速给定值在720 r/min (超同步运行)和480 r/min (亚同步运行)变化时无功功率,转矩,Ids1,Ids2,Vds2,Iqs1,Iqs2,Vqs2的响应波形。
由图3(a)可知,转速控制器可以稳定快速地跟随转速变化值。由图3(d)可知,无功功率在转速变化时有扰动但很快可以恢复为0。由图3(c)和图3(e)可以看出,Ids1,Ids2,Vds2的值都有变化,以补偿转速的扰动;Iqs1,Iqs2的值基本保持不变,而Vqs2的值有扰动,原因是受到了Vds2的耦合作用。

(a) 转速
(b) 转矩

(c) Ids1,Ids2,Vds2

(d) 无功功率
(e) Iqs1,Iqs2,Vqs2
3.2 无功功率变化试验
图4为电机转速给定为675 r/min,无功功率变化时转速,转矩,Ids1,Ids2,Vds2,Iqs1,Iqs2,Vqs2的响应波形。无功功率参考值设定: 0~2 s为-2 000 Var,2~4 s为2 000 Var,4~6 s为-2 000 Var。
如图4(a)所示,无功功率控制器可以控制无功功率快速跟随给定值的变化,同时可以控制PW吸收或输出无功功率。如图4(c)所示,电机转速约有5 r/min的变化。由图4(b)和图4(d)可以看出,Iqs1,Iqs2,Vqs2的值都有变化,以补偿无功功率的扰动;Ids1,Ids2的值基本保持不变,而Vds2的值有扰动,原因是受到了Vqs2的耦合作用。

(a) 无功功率

(b) Iqs1,Iqs2,Vqs2
(c) 转速

(d) Ids1,Ids2,Vds2

(e) 转矩
3.3 负载转矩阶跃变化试验
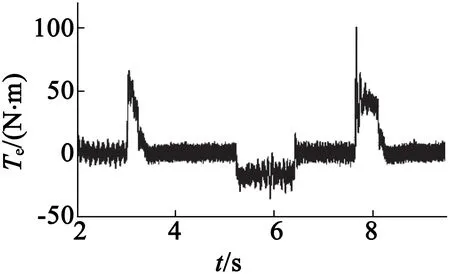
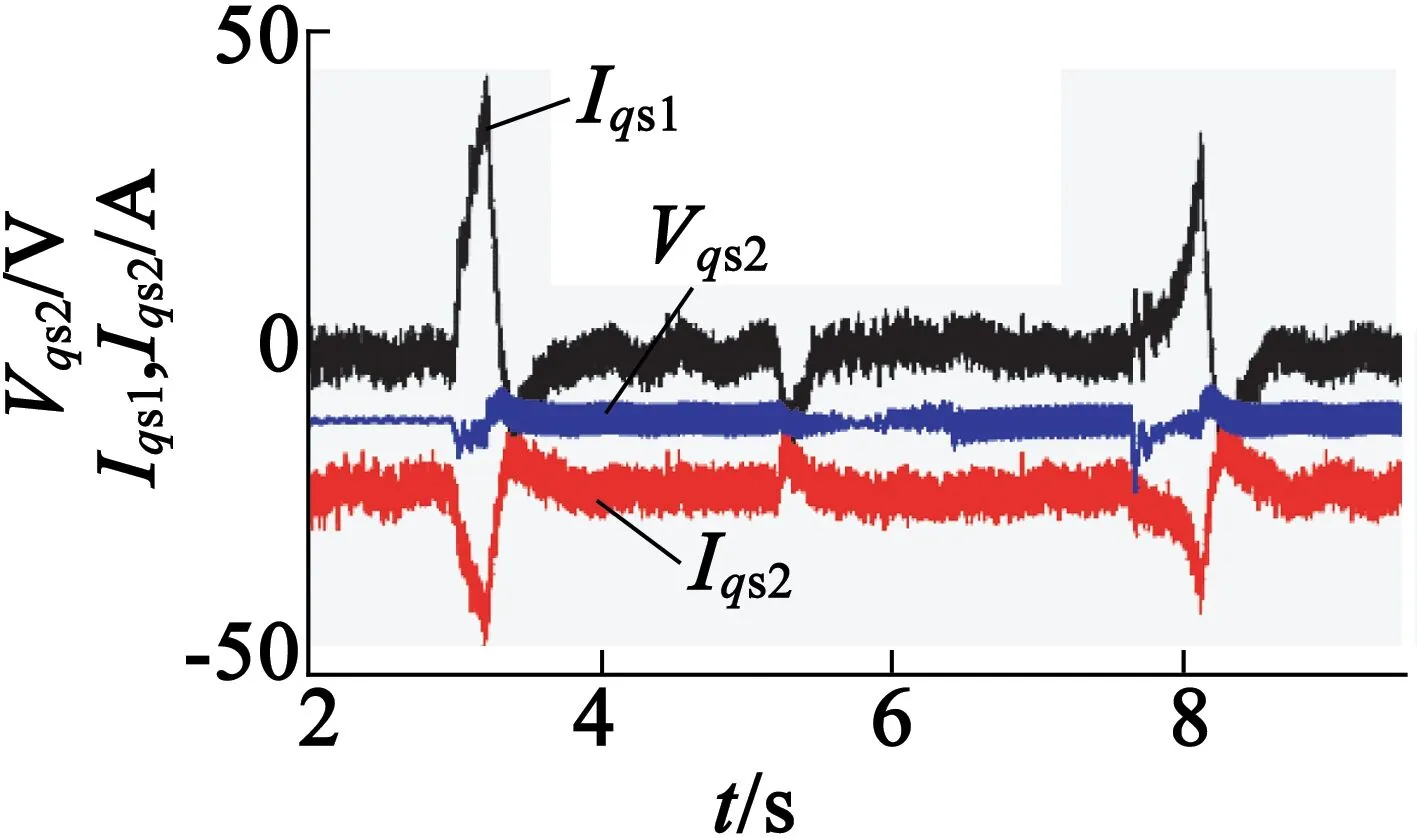
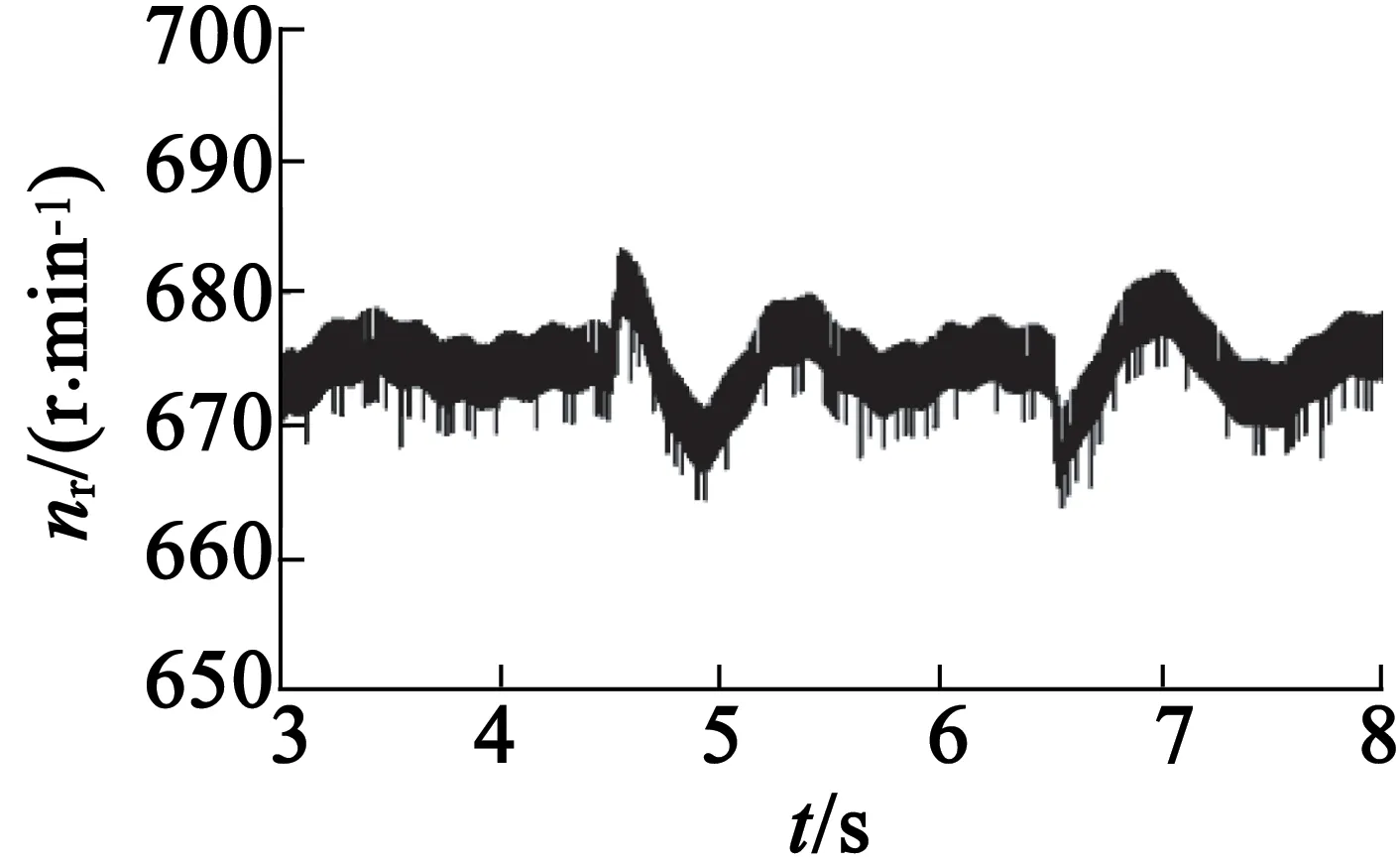
图5为电机转速给定为675 r/min,无功功率给定值为0,负载转矩变化时的转矩,转速,无功功率,Ids1,Ids2,Vds2,Iqs1,Iqs2,Vqs2的响应波形。负载转矩给定值: 0~2.5 s为空载,2.5~4.5 s为103 N·m,4.5~6.3 s为空载。
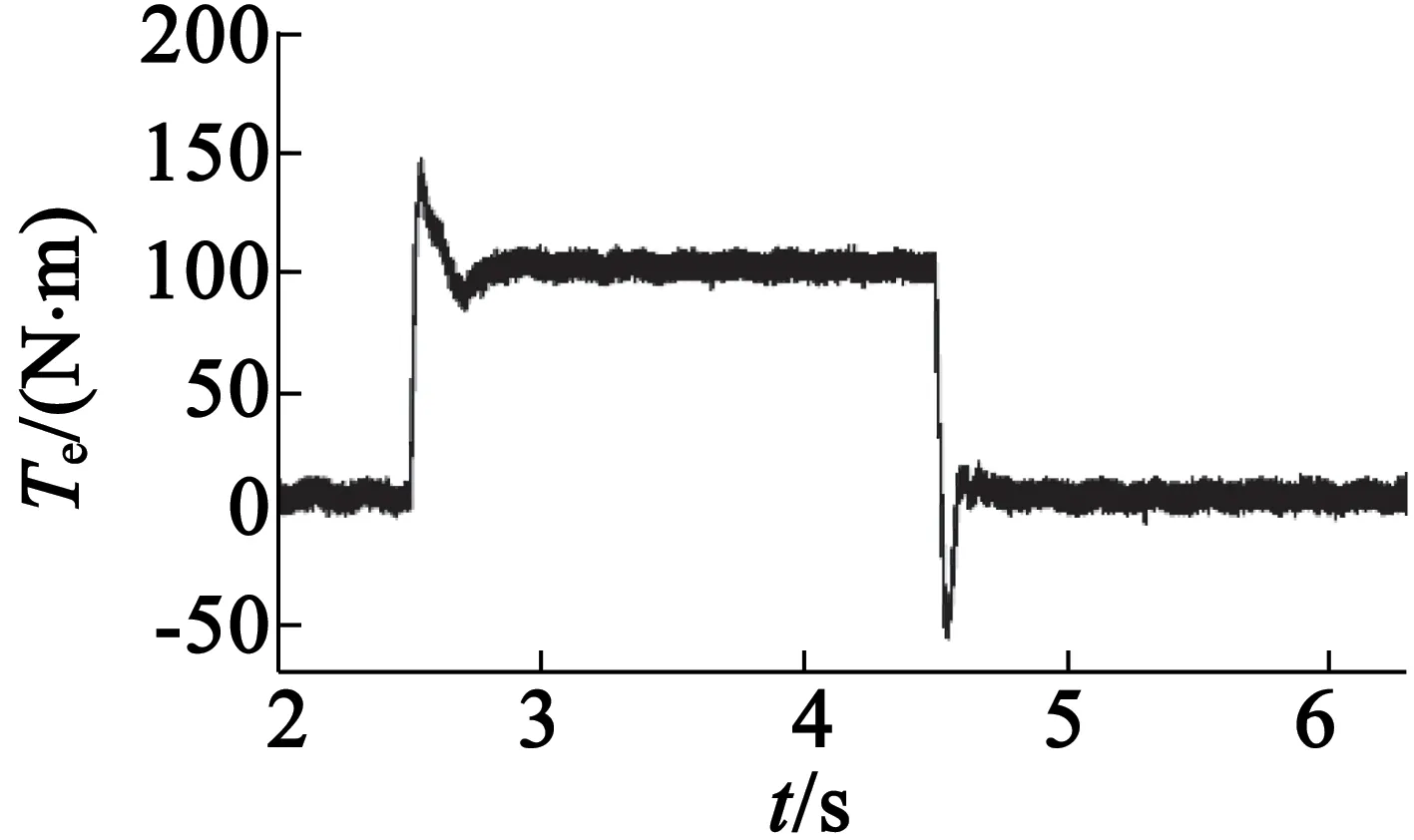
(a) 转矩

(b) 转速

(c) Ids1,Ids2,Vds2
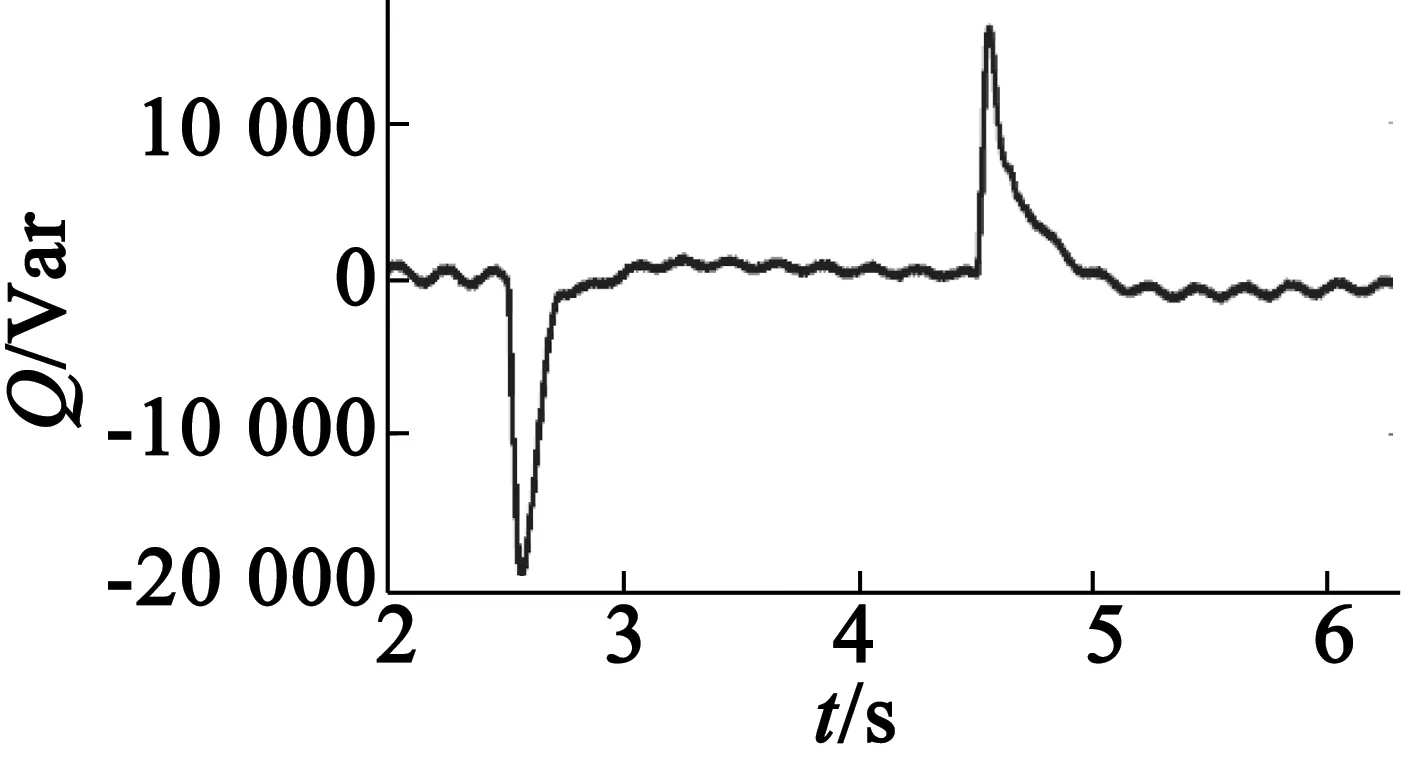
(d) 无功功率
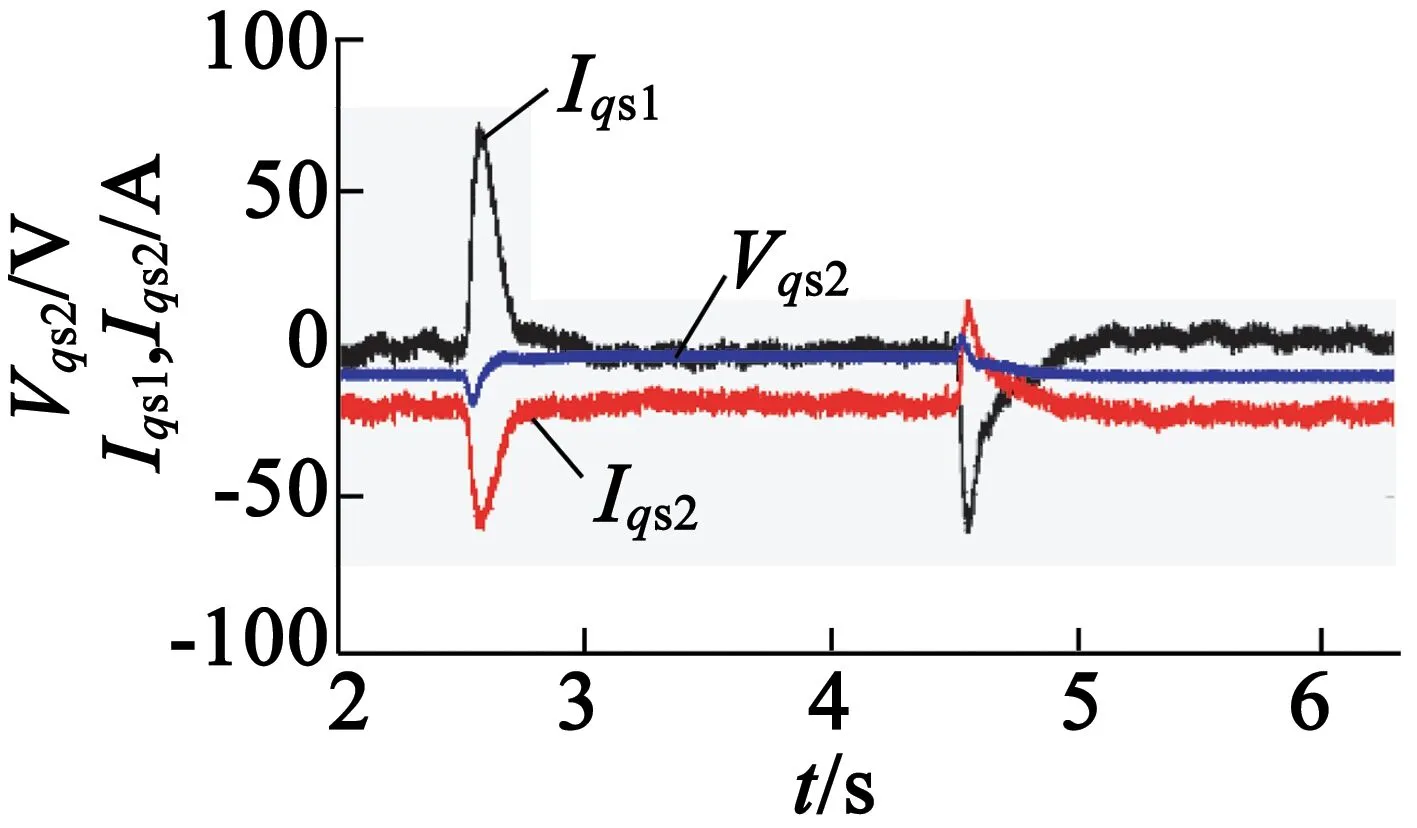
(e) Iqs1,Iqs2,Vqs2
如图5(a)和图5(b)所示,负载转矩变化时,转速发生微小扰动然后可以快速回到给定值。无功功率出现了较大的扰动,说明了转速/转矩控制环对无功功率控制环的耦合较大。
4 结 语
本文在BDFM的统一矢量模型的基础上提出了具有转速控制环和无功功率控制环的矢量控制系统,并给出了详细的理论推导。控制策略由在BDFM的变频调速实验平台上进行了试验研究。试验结果表明了在该控制策略下BDFM在转速、无功功率、转矩信号给定值变化扰动时可以保持稳定运行。下一步将针对两控制环之间的交叉耦合问题进行补偿模块的研究。
[1] SANTISTEBAN J A,STEPHAN R M.Vector control methods for induction machines:An Overview[J].IEEE Transactions on Education,1995,28(18):147-151.
[2] MCMAHON R A,ROBERTS P C,WANG X.Performance of BDFM as generator and motor[J].Electric Power Applications, IEE Proceedings -,2006,153(2):289-299.
[3] SHAO S,ABDI E,BARATI F.Stator-flux-oriented vector control for brushless doubly fed induction generator[J].IEEE Transactions on Industrial Electronics,2009,56(10):4220-4228.
[4] POZA J,OYARBIDE E,SARASOLA I.Vector control design and experimental evaluation for the brushless doubly fed machine[J].Iet Electric Power Applications,2009,3(4):247-256.
[5] SHAO S,ABDI E,MCMAHON R.Vector control of the brushless doubly-fed machine for wind power generation[C]//IEEE International Conference on Sustainable Energy Technology.IEEE,2009:322-327.
[6] SARASOLA I,POZA J,RODRIGUEZ M A.Direct torque control for brushless doubly fed induction machines[C]//IEEE International Electric Machines & Drives Conference, 2007:1496-1501.
[7] ZHAO R,ZHANG A,MA Y.The dynamic control of reactive power for the brushless doubly fed induction machine with indirect stator-quantities control scheme[J].IEEE Transactions on Power Electronics,2015,30(9):5046-5057.
[8] ZHANG A,WANG X,JIA W.Indirect stator-quantities control for the brushless doubly fed induction machine[J].IEEE Transactions on Power Electronics,2014,29(3):1392-1401.
[9] ZHANG X,SHU J,WU J.Decoupled power control based on the ADRC for brushless doubly-fed machine[J].Acta Energiae Solaris Sinica,2008(12):1477-1484
[10] ZHOU D,SPEE R,ALEXANDER G C.Experimental evaluation of a rotor flux oriented control algorithm for brushless doubly-fed machines[J].IEEE Transactions on Power Electronics,1997,12(1): 913-919.
[11] ZHOU D,SPEE R,ALEXANDER G C.A simplified method for dynamic control of brushless doubly-fed machines[C]//Conference of the IEEE Industrial Electronics Society, 1996:946-951.
[12] ZHOU D,SPEE R.Field oriented control development for brushless doubly-fed machines[C]//IAS Meeting, 1996:304-310.
[13] SPEE R,WALLACE A K,LAUW H K.Performance simulation of brushless doubly-fed adjustable speed drives[C]//Industry Applications Society Meeting,1989:738-743.
[14] ZHANG F,YU S,WANG X.Research of a novel brushless doubly-fed generator with hybrid rotor[J].IEEE Transactions on Applied Superconductivity, 2016,26(7):1-5.
[15] BARATI F,MCMAHON R,SHAO S.Generalized vector control for brushless doubly fed machines with nested-loop rotor[J].IEEE Transactions on Industrial Electronics,2013,60(6):2477-2485.
[16] BARATI F,ORAEE H,ABDI E.Derivation of a vector model for a brushless doubly-fed machine with multiple loops per nest[C]//IEEE International Symposium on Industrial Electronics, 2008: 606-611.
[17] BARATI F,ORAEE H,ABDI E.The brushless doubly-fed machine vector model in the rotor flux oriented reference frame[C]//Conference of the IEEE Industrial Electronics Society , 2008: 1415-1420.
[18] BARATI F,SHAO S,ABDI E.Generalized vector model for the brushless doubly-fed machine with a nested-loop rotor[J].IEEE Transactions on Industrial Electronics,2011,58(6):2313-2321.
[19] BROEKHOF A,MCMAHON R,MACIEJOWSKI J.Reference frame re-alignment for vector control of the brushless doubly-fed machine[C]//Control Conference:2013:4580-4585.
[20] 段琦玮,刘石,龙腾.统一矢量模型的无刷双馈电机的转速控制[J].自动化仪表,2017,38(6):1-5.
[21] ADEMI S,JOVANOVIC M G.Vector control methods for brushless doubly fed reluctance machines[J].IEEE Transactions on Industrial Electronics,2015,62(1):96-104.