小型化高稳定半导体激光驱动电路研究
2018-04-27邱选兵孙冬远李传亮蒋利军魏计林
邱选兵,李 宁,孙冬远,李传亮,蒋利军,魏计林,王 高
(1.太原科技大学应用科学学院,山西 太原 030024;2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
1 引 言
目前,分布式反馈激光器(Distributed Feedback Laser,DFB)已经越来越趋向于小型化、低成本、高功率方向的发展,在环境、医疗、食品、国防、工业自动化等方面得到了广泛的应用。可调谐半导体激光吸收光谱(Tunable Diode Laser Absorption Spectroscopy,TDLAS)技术是一种基于DBF半导体激光器的波长扫描和电流调谐特性的气体吸收光谱检测技术,该技术具有非接触、响应时间短、灵敏度高、指纹识别、实时测量等优点而被广泛应用于恶劣环境下的气体浓度、温度、压力以及速度等参数的测量[1-2]。由TDLAS的原理可知,激光器输出激光波长的准确度和稳定度是实现气体分子指纹检测的关键,而DFB的输出波长主要取决于激光器的工作温度与注入电流的大小和稳定度。DFB驱动电流和工作温度的稳定性是衡量一个半导体激光器驱动性能优劣的主要指标,因此在激光光谱应用中需要优先考虑激光器的驱动电流和温度控制[3-4]。
国外商用的DFB激光器驱动器的厂商主要有Wavelength、ILX Lightwave和Thorlabs公司等大公司[5],这些厂商制造的激光驱动器功能齐全、智能化程度高,但是其价格昂贵、体积大、性价比很低,不能适应嵌入式的实时测量中。国内厂商制造的驱动电路中多以MOS管驱动DFB,控制精度不高,容易受到电子器件本身和工作环境的影响。在温度控制方面,多采用模拟比例-积分-微分(PID)控制环,温度控制精度和灵活性差,因此需要研制一种适用于工业现场环境的小型化、高精度、高稳定度、数字化和智能化的激光驱动电路[6-7]。
针对在嵌入式实时测量中半导体激光器温度和电流的控制,采用美国Wavelength公司的温控芯片WTC3243和电流驱动芯片WLD3343作为半导体激光器主要驱动芯片,基于低功耗单片机STM32F103控制DFB的温度和输入电流的稳定调节,实现DFB激光器输出波长的稳定、连续可调。
2 高精度稳压电源设计
激光器的电源稳定度是波长调制精确度的前提,根据激光驱动器集成化和稳定性的要求,设计了一种体积小、高稳定、低纹波线性稳压电源。该电源由交流降压、整流滤波、线性稳压和低通滤波4部分组成。变压器先将220 V/50 Hz交流电降压到±6 V交流电源,再通过KBP307的整流桥整流后进入10000 μF和0.1 μF并联电容滤波,经过滤波后的电源进入到高精度线性稳压芯片中。0.1 μF小电容抑制高频噪声,10000 μF电容降低电源纹波。如图1所示。
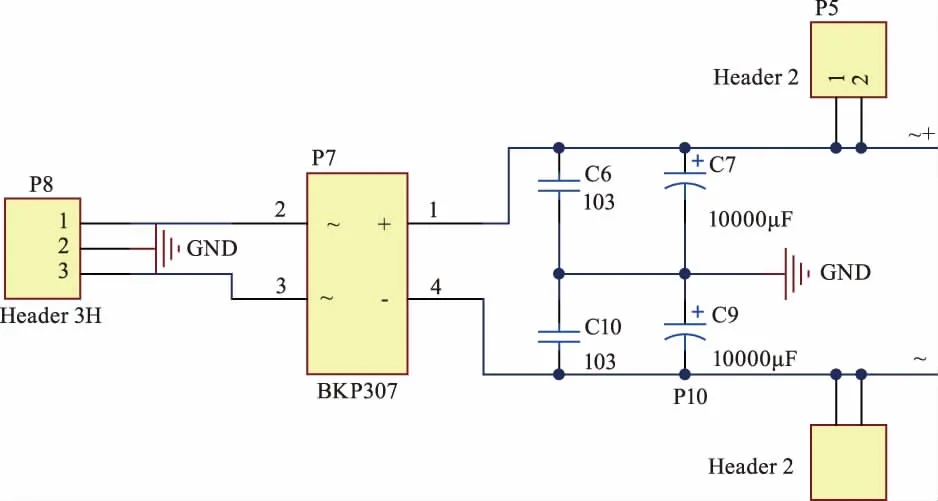
图1 整流滤波电路Fig.1 Rectifier and filter circuit
正负稳压电源芯片选择为凌特公司LT1086/LT3015,可以提供1.5 A/3 A的输出电流,并且可以在1 V的低压差条件下运行,电压准确度调节率为1%,电压调整率0.015%。该芯片的电压调整率小,负载调整率小的特点能够保证在低纹波的条件下稳定运行。低通滤波采用LC-π型滤波模块,如图2所示,该部分使用了2200 μF和0.01 μF电容并联,在降低高频干扰的同时抑制纹波。并联的电感是为了增大通过的电流,其截止频率公式为:
(1)
其中,L=440 μH,C=2200 μF,计算得截止频率为161 Hz。
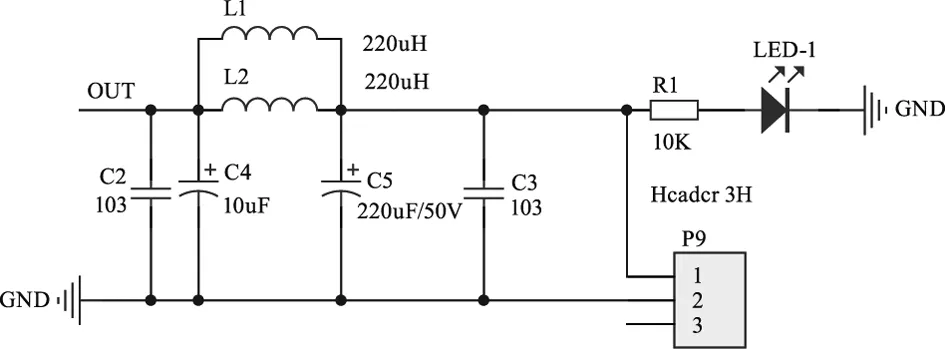
图2 低通滤波电路Fig.2 Low pass filter circuit
该电源使用优利德UT61E四位半高精度万用表进行测量,负载为功率电阻,总电流为250 mA,每间隔1 h记录电源电压,进行12 h稳定度测试,所得实验数据如表1所示。
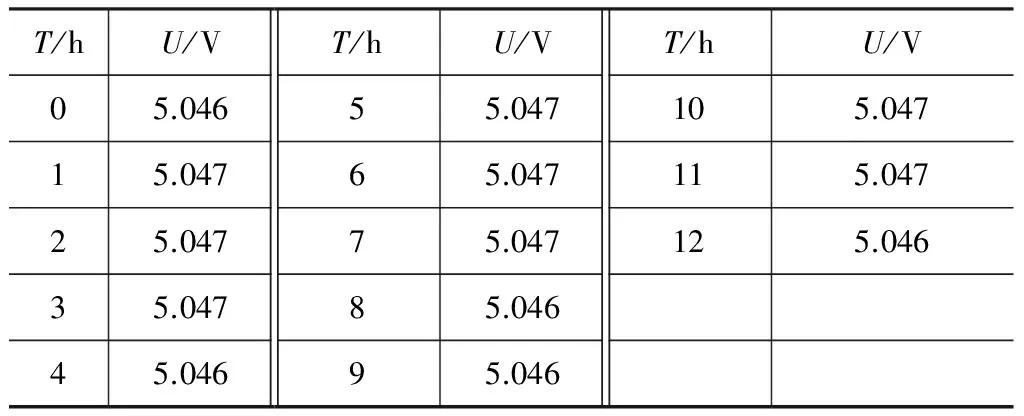
表1 电源长期稳定度测试数据Tab.1 Experimental data for long time stability test
为评价电源的稳定性,引入变异系数,变异系数也称为离散系数、稳定度,它是反映数据分布状况的一个统计量,用来反映单位均值上的离散程度,在电源中用来描述其长时稳定度的度量[8],定义为标准差和算数平均数的比值:
(2)
式中,C.V为稳定度;SD为准差;MN为样本平均值。从式(2)可以看出研制的电源其12 h的稳定度达到了1.003×10-4,满足高稳定低温漂的激光驱动电源需求[9]。
3 激光驱动电路
3.1 系统总体
整体的驱动电路分为主控电路、温控电路、恒流驱动电路、DAC电路,其控制原理如图3所示。
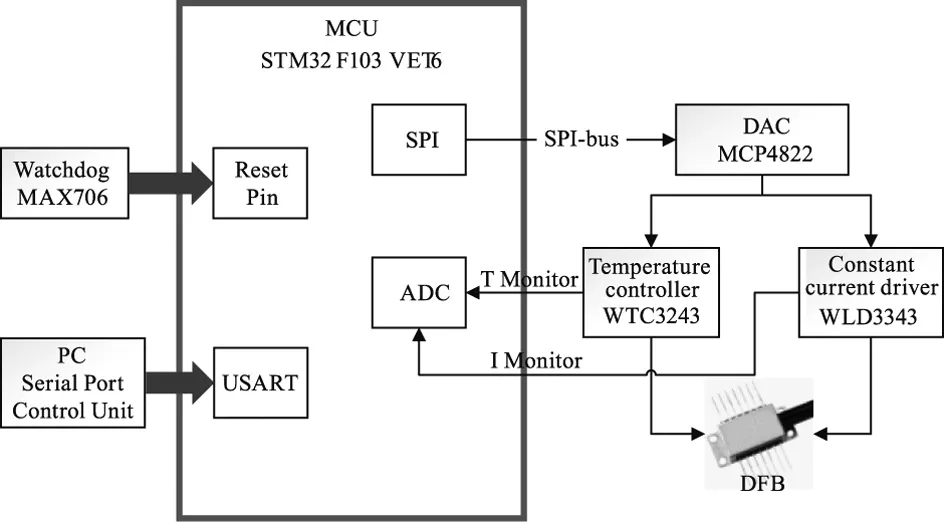
图3 驱动电路整体框图Fig.3 The diagram of the whole driving circuit
整个系统的控制部分由计算机完成,计算机通过串行口可以设置DFB的注入电流和工作温度。控制信号经串口从PC传输到MCU(Microcontroller Unit)后,MCU经过SPI(Serial Peripheral Interface)总线与MCP4822通信分别控制WTC3243和WLD3343,分别控制DFB的温度和注入电流,同时外部的扫描和波长调制信号可以通过BNC外部输入,实现激光器的波长调制和解调功能。
由于CO2在近红外和中红外波段都有吸收,而且在中红外的吸收强度较近红外高,但是中红外激光器价格昂贵,成本高。因此,选择已经广泛应用于通信及气体检测领域的商用近红外DFB激光器作为CO2气体检测系统的光源,在1.43 μm波段附近具有较强的CO2吸收带,并且带吸收带的H2O干扰较小[10]。所以驱动电路测试的DFB选择中心波长为1430 nm,峰值输出波长在1428~1432 nm之间。
3.2 主控电路
主控芯片采用ST公司的基于Cortex-M3内的低功耗STM32F103(MCU)微控制器,具有体积小、功耗低等特点,适合小型化的集成应用。MCU控制DAC(Digital to Analog Converter)芯片MCP4822调节半导体激光器的工作温度和驱动电流;采用片上集成的12位ADC(Analog to Digital Converter)采集经过放大电路后的温度和驱动电流的反馈信号,实现对温度和驱动电流的实时监控和控制。MCU的模拟参考电压由REF3130提供,该芯片输出电压为3.0 V,电压误差为±0.2%,温度系数为15 ppm/℃,结合合理的放大电路可以实现高精度的模拟数据采集,其原理图如图4所示。
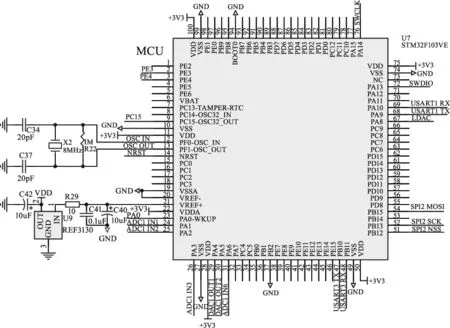
图4 主控引脚连接图Fig.4 Interface diagram of MCU
3.3 温控电路
温控电路的核心芯片为WTC3243,它是一款功能齐全、稳定性较高、外观紧凑的温度控制器。内部集成积分时间和增益倍数可调节的模拟比例积分控制环,调节温度的精度可以达到0.0009 ℃,它可以控制加热电阻或者TEC(Thermo Electric Cooler)元件来使温度保持稳定,最大驱动电流达到2.2 A。该器件的外围电路设计如图5所示,芯片通过VSET引脚上的电压来控制半导体激光器的工作温度。WTC3243通过为半导体激光器内部的热敏电阻提供一个偏置电流,在S+引脚上产生一个偏置电压,通过比较该电压值和VSET电压值,从而改变芯片驱动TEC电流的大小和方向,完成半导体激光器工作温度调节。另外MCU内部ADC通过采样S+端的电压值,即可得到半导体激光器工作温度,方便对其温度进行调节和监控。
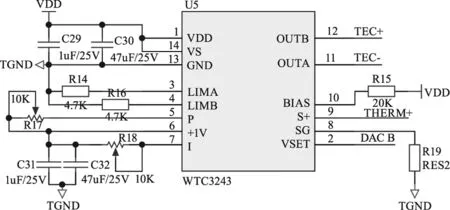
图5 WTC3243外围器件连接图Fig.5 The diagram of componentssurrounding WTC3243
通过改变外部电阻来调节输出TEC的电流大小、PI控制环增益和时间常数。输出电流大小和LIMA和LIMB连接电阻阻值有关,部分RLIMA和RLIMB阻值与最大TEC驱动电流的对应情况如表2所示。
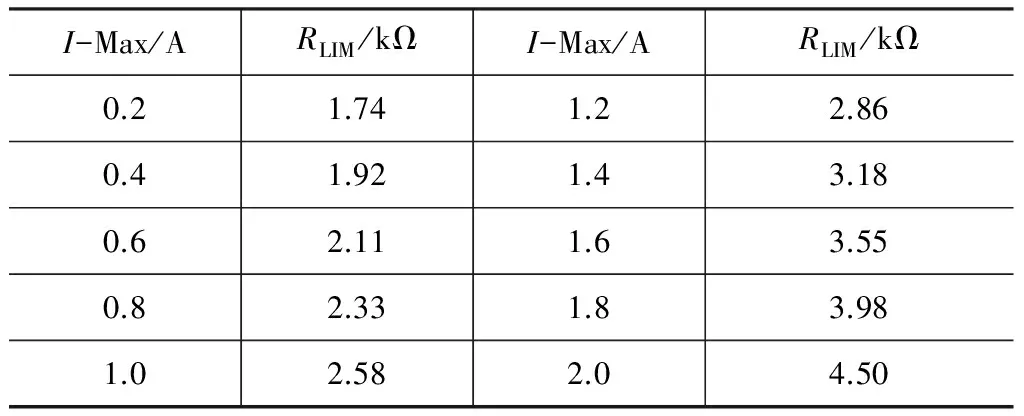
表2 最大输出电流及RLIMA和RLIMB关系Tab.2 The relationship between maximum output current and RLIMA,RLIMB
综合考虑温度调节的范围和温度调节能力以及半导体激光器中TEC允许的最大电流,确定最大输出电流为1 A,RLIMA和RLIMB均选择2.7 kΩ电阻。
温度传感器的偏置电流可以通过BIAS引脚上拉一个电阻到电源,该电阻阻值计算公式为:
(3)
芯片的最大的VSET值为2 V,而DFB激光器中内部的温度传感器为10 kΩ的热电阻,因此需要提供100 μA的偏置电流,RBIAS选择20 kΩ。
WTC3243的VSET引脚连接到DAC的输出电压引脚进行温度调节。当DFB激光器的工作温度和预设温度相同时,MCP4822输出电压保持稳定,该器件驱动TEC电流为0。当激光器温度和预设温度不同时,MCU计算并命令MCP4822输出相应的电压值,该器件改变驱动TEC电流大小和方向,进行制冷或者加热,控制激光器工作温度等于预设温度,并且保持稳定。
3.4 恒流驱动电路
恒流驱动电路的主要芯片为WLD3343,是美国Wavelength公司研制的专门用来驱动激光器的器件,该芯片有恒功率模式和恒电流模式,本设计采用恒电流驱动模式,最大的驱动电流可以达到2A,驱动电流的稳定度为200 ppm。该芯片的外围器件的连接图如图6所示,芯片通过设置VSET引脚上的电压来设置激光器的驱动电流,单片机管脚PA0控制激光器的关断,电流监控脚IMON通过RC滤波后进入单片机内部模数转换,获取实时驱动电流,DFB激光器从电压源获取电流,然后从OUTA引脚输入到WLD3343内部的恒流源。
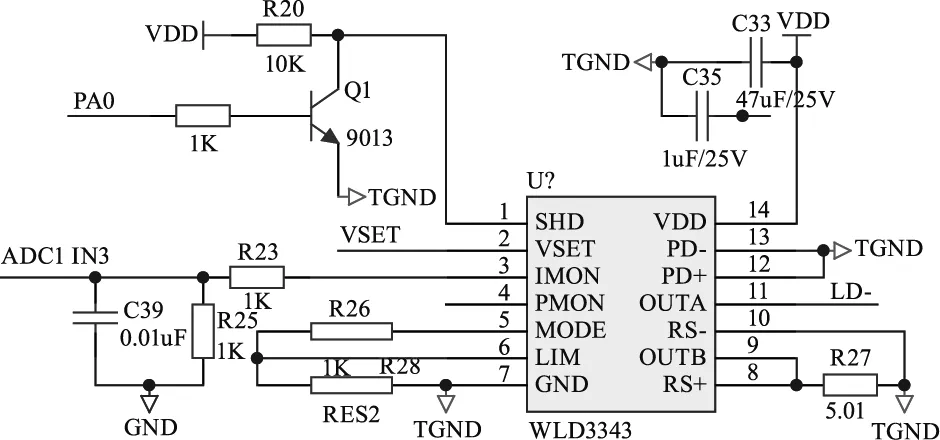
图6 WLD3343外围器件连接图Fig.6 The diagram of components surrounding WTC3343
WLD3343最大驱动电流由RS+和RS-之间的电阻阻值来确定,计算公式如下:
(4)
本文采用的DFB激光器最大电流为120 mA,为保护激光器,此处选用的电阻为10 Ω,即最大的输出电流为100 mA。
在恒流驱动模式,可以通过芯片IMON引脚上的电压监测DFB的驱动电流,该电压值和驱动电流的关系为:
VIMON=2×ILD×RSENSE[V]
(5)
因此,加载到VSET引脚上的电压与和激光器的实际驱动电流的关系如下:
(6)
在TDLAS实际应用中,激光器的驱动电流既可以通过MCU控制DAC产生一个稳定的直流电压直接控制,同时外部的调制和扫描电压通过BNC接口输入到电压设置端,实现气体的波长调制功能。
3.5 DAC驱动输出
DFB驱动的工作温度和注入电流的控制电平是通过集成内部参考的DAC转换器MCP4822,与MCU采用SPI通信方式连接。MCP4822是美国Microchip公司生产的高精度、低功耗、低成本高度集成化的模数转换器,主要参数:双通道12位DAC、内部集成2.048 V的参考电压(其温度系数为50 ppm/℃)、可选2倍参考电压输出、单电源(2.7 V 至 5.5 V)、建立时间4.5 μs,工作电源为-40 ℃至 +125 ℃。MCP4822两路模拟电压输出其中一路用于设置激光器的工作温度,另一路设置注入电流的大小,由于在实际驱动应用中,温度和电流的范围有限,12位的DAC输出已经足够满足需求,其外部接口电路如图7所示。
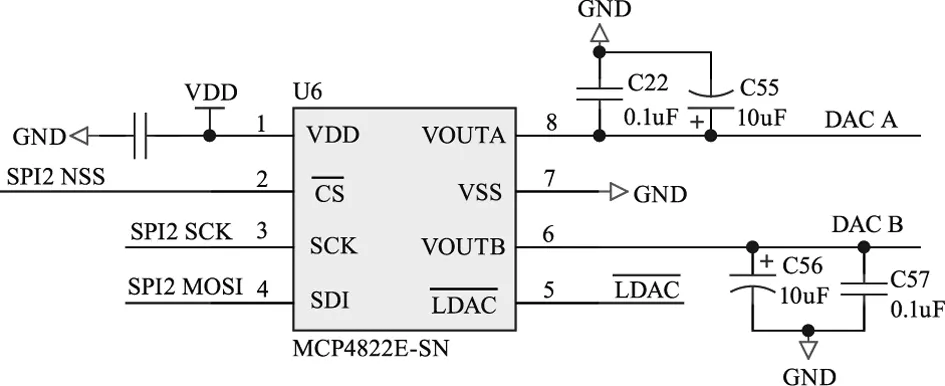
图7 MCP4822接口电路Fig.7 MCP4822 interface circuit
4 实验与讨论
由于在TDLAS的实际应用中要求在气体的吸收带范围内的波长扫描范围和稳定的激光输出,为测试驱动电路的性能,针对波长扫描范围进行了线性度实验和输出激光的稳定进行了稳定性实验,激光输出信号输入到Bristol 621高精度波长中,波长计采用USB接口与计算机相连,实验连接图如图8所示。
4.1 线性度实验
线性度实验的实验步骤是先保持激光器为某一工作温度,驱动电流从20 mA渐变到80 mA,过程中记录输出激光的波数;其次改变工作温度,重复上述实验。激光器的工作温度的变化范围为10~39℃。实验测得的激光器输出波长与驱动电流以及温度的曲线如图9所示。
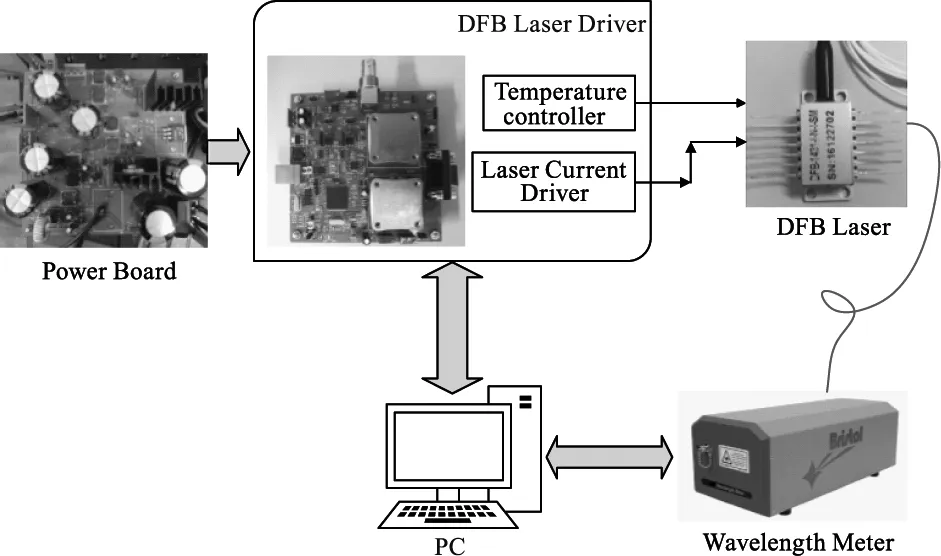
图8 实验设备连接图Fig.8 Diagram of the experimental system
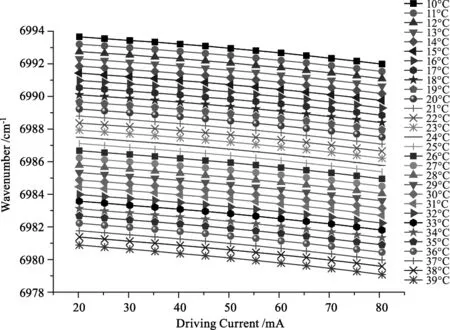
图9 不同温度和不同电流下激光器输出波长曲线图Fig.9 Curve of wavenumber under different temperature and current
图9中,随着温度升高,DFB输出激光的波数变小,其变化的趋势基本为线性关系。另一方面,随着驱动电流增大,DFB的输出激光波数线性的减小,这和DFB的数据手册给出的参数一致。从图9可以看出激光器的输出波数与驱动电流成反比,不同温度下的激光器输出则表现出不同的截距。
为进一步描述DFB激光器的驱动电流与波长的线性度,将上述实验数据进行线性拟合,如图10(a)和(b)分别是不同温度下驱动电流与波数的线性拟合后的相关系数R和斜率标准差δ的关系。从图10(a)可见随着温度的升高,相关系数从-0.9958变到-0.99773,其值为负表示两者的变化趋势成反向,并且相关系数的绝对值越接近1,其相关性越好;而拟合后的标准差随着温度的上升,其值从7.6084310-4减小到6.0403210-4,斜率标准差越小代表斜率越稳定,线性度越好,正如10(b)所示。从图10可以得出,在选择CO2吸收峰的时候,尽可能的选择温度高的工作点,这样线性度更高,并且其标准差也小,从而更为准确控制激光器的调制。
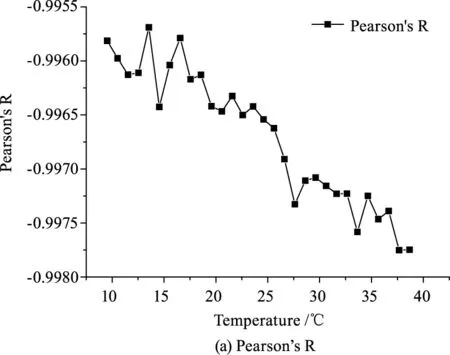
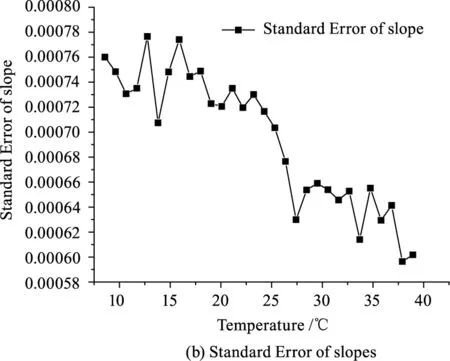
图10 不同温度下的相关系数和斜率标准差Fig.10 Pearson's R and Standard Error of slope at different temperature
图11是温度为10 ℃、20 ℃、30 ℃、39 ℃时线性拟合曲线,对比拟合曲线和原始数据,可得残差最大为-0.08538个波数,最小为4.385610-4个波数。可见拟合曲线和原始数据的偏差很小,DFB输出波数和驱动电流具有良好的线性度,可以满足TDLAS气体浓度检测对激光器线性度的要求。
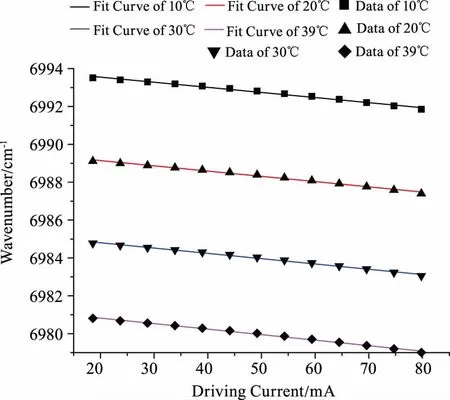
图11 部分温度下的线性拟合曲线Fig.11 Linear fitting forsome temperatures
4.2 稳定性测试
稳定性实验是测试激光驱动器工作的稳定程度,稳定度测试分为短时稳定性测试和长时稳定性测试两部分。
短时稳定性测试实验方法是固定温度和驱动电流,然而记录10 min的输出波数,采样间隔为0.15 s,共计4000个采样点,再改变驱动电流和温度重复以上实验。图12(a)为电流为45 mA时激光器的输出波数曲线图。通过图12(a)可以看出在10 min以内,输出波数的差值0.01个波数,激光器输出波长满足实验所需的稳定度。
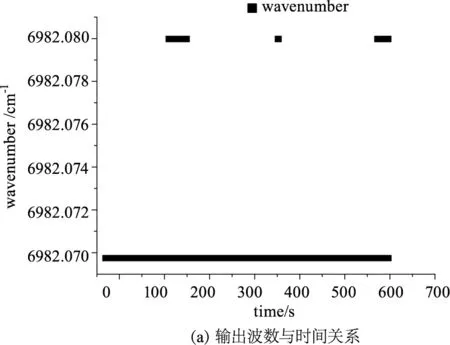
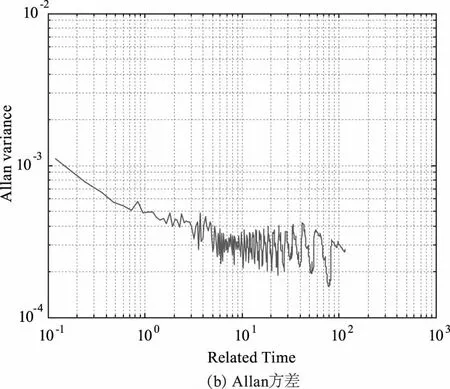
图12 35 ℃,45 mA稳定度试验Fig.12 Stability test at 35 ℃,45 mA
为了进一步分析系统的稳定性,引入Allan方差[11],对存在于光谱探测信号中的激光器自身噪声、光学噪声以及电路的电子噪声等不同噪声项进行量化。通过Allan方差能清楚地观测各类噪声随积分时间变化而产生的规律,可以对各种噪声源进行辨识,评估系统的稳定性[12]。当温度为35 ℃、驱动电流为45 mA时,计算得Allan方差曲线如图12(b)所示。在5.25 s时,Allan方差得到最小值0.0002597。
长时间稳定性测试实验方法是将DFB的工作温度设为27 ℃注入电流设为45 mA,此时输出波数在CO2吸收线附近,进行24 h的输出波数记录,采样间隔为0.15 s,共57600个采样点。每隔100个采样点取一个点,绘制的曲线如图15所示。由图13中可以看出输出波数最大差值仅有0.0134个波数。将图13中实验数据带入式(2),计算长期稳定度为3.9810-7。从所得结果可以看出数据在均值附近离散程度很小,稳定性良好。
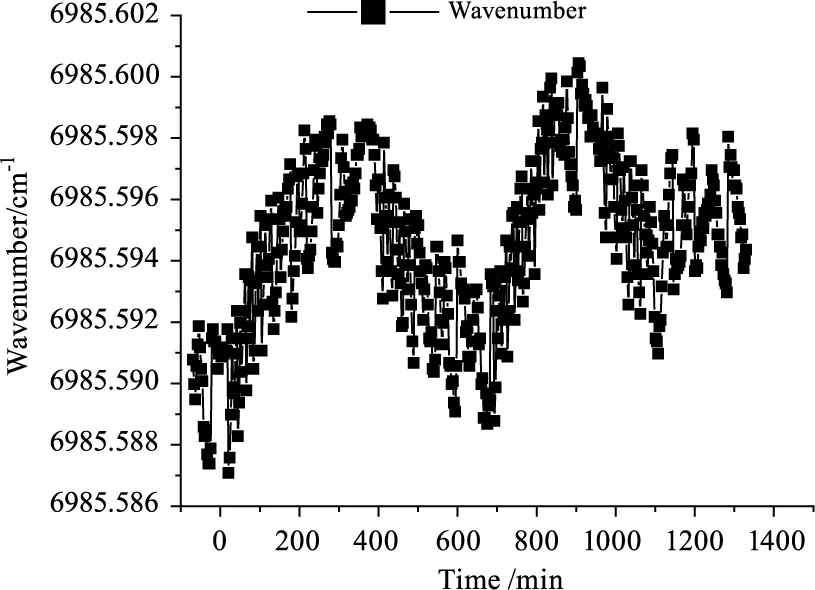
图13 输出波数长期稳定性Fig.13 Long-term stability testof wavenumber
5 结 论
本驱动电路以STM32F103VET6为主控芯片,通过DAC芯片MCP4822实现温控芯片WTC3243和恒流驱动模块WLD3343的激光恒流恒温控制。实验证明,该激光驱动器可以使用输出的激光波长随温度和驱动电流的变化进行线性变化,短时工作时,输出激光的偏差为0.01个波数,长时工作时,波数偏差0.014个波数。该激光器驱动电路具有良好的线性度和很高的稳定性,线性相关系数大于0.9958、标准差小于7.6084310-4,Allan方差在5 s时小于2.59710-4,为下一步的基于TDLAS遥感测量的CO2准确测量奠定了基础。
参考文献:
[1] HANSON R K.Applications of quantitative laser sensors to kinetics,propulsion and practical energy systems[J].Proceedings of the Combustion Institute,2011,33(1):1-40.
[2] HE Junfeng,HU Jun,KAN Ruifeng,et al.Laser tuning performance testing and optimization in TDLAS oxygen measuring systems[J].Spectroscopy and Spectral Analysis,2015,35(3):577-581.(in Chinese)
何俊峰,胡军,阚瑞峰,等.TDLAS 氧气测量系统中激光器调谐性能测试与优化[J].光谱学与光谱分析,2015,35(3):577-581.
[3] LIU Yu,DUAN Silong.A digital controlled laser power supply system[J].Laser & Infrared,2009,39(10):1064-1067.(in Chinese)
刘玉,段士龙.一种全数字控制的工业激光器驱动电源[J].激光与红外,2009,39(10):1064-1067.
[4] LUO Liang,HU Jiachen,WANG Canyuan,et al.Design of high-precision driving power and temperature control circuit for semiconductor laser[J].Laser Technology,2017,41(2):200-204.(in Chinese)
罗亮,胡佳成,王婵媛,等.高精度半导体激光器驱动电源及温控电路设计[J].激光技术,2017,41(2):200-204.
[5] DANG Jinming,ZHAI Bing,GAO Zongli,et al.Nanosecond driver for multiple pulse-modulated Infrared quantum cascade lasers[J].Optics and Precision Engineering,2013,21(9):2209-2216.(in Chinese)
党敬民,翟冰,高宗丽,等.纳秒级脉冲型群红外量子级联激光器驱动电源[J].光学 精密工程,2013,21(9):2209-2216.
[6] CONG Menglong,LI Li,CUI Yansong,et al.Design of high stability digital controldriving system for semiconductor laser[J].Optics and Precision Engineering,2010,18(7):1629-1636.(in Chinese)
丛梦龙,李黎,崔艳松,等.控制半导体激光器的高稳定度数字化驱动电源的设计[J].光学 精密工程,2010,18(7):1629-1636.
[7] EE Eyler.Instrumentation for laser physics and spectroscopy using 32-bit microcontrollers with an Android tablet interface[J].Review of Scientific Instruments,2013,84(10):103101.
[8] TIAN Xiaojian,SHANG Zuguo,GAO Bo,et al.Control system for 980 nm high stability laser pump source[J].Optics and Precision Engineering,2015,23(4):982-987.(in Chinese)
田小建,尚祖国,高博,等.980nm高稳定度激光泵浦源控制系统[J].光学 精密工程,2015,23(4):982-987.
[9] ZHANG Guoxiong,HUANG Chunhui.Continously adjustable semiconducter laser diode driver with high stability[J].Laser & Infrared,2011,41(2):160-163.(in Chinese)
张国雄,黄春晖.一种高稳定连续可调半导体激光器驱动源[J].激光与红外,2011,41(2):160-163.
[10] Rothman L S,Gordon I E,Babikov Y,et al.The HITRAN2012 molecular spectroscopic database[J].Journal of Quantitative Spectroscopy and Radiative Transfer,2013,130:4-50.
[11] Allan D W.Statistics of atomic frequency standards[J].IEEE Proceedings,1966,54(2):221-230.
[12] Viciani S,Siciliani M,Borri S,et al.A quartz-enhanced photoacoustic sensor for H2S trace-gas detection at 2.6μm[J].Applied Physics B,2015,119(1):21-27.