深层水泥搅拌注浆量控制技术改进及应用
2018-04-27乔杨
乔杨
(中交第一航务工程局有限公司,天津 300456)
0 引言
DCM(深层水泥搅拌)是一种重要的地基处理工法,在日本应用非常广泛,在国内天津港、烟台港的码头建设中也曾试验性地应用过[1-2]。香港机场第三跑道扩建工程是目前世界上应用DCM工法的规模最大的项目,加固后的DCM体积约1 480万m3。为满足该项目要求,一航局将挤密砂桩船(砂桩2号)改造成DCM船(以下提及的砂桩2号,保留了船名,实际是DCM船)。在改造和试验过程中,发现依据韩国经验设计的部分工艺方案不能满足香港机场项目技术规格书的要求,注浆量控制方案就是其中之一。
DCM是原位土体与外加水泥拌和后,经水化反应、活化反应形成的水泥土,因此准确控制水泥的加入位置和加入量,是保证施工质量的关键[2-3]。水泥是以水泥浆的形式通过泥浆泵连续注入到土体中的,质量控制的关键就转化成了对注浆流量、处理机提升/贯入速度以及两者实时联动关系的控制[4-7]。由于砂桩2号所使用的泥浆泵是软管泵,输出流量具有明显的脉动特性,同时香港机场项目处于外海,施工作业工况较差,加之船上机电设备运行产生的电磁杂波对流量计测量数据的影响、控制系统PLC程序存在的缺陷等,导致实际注浆流量波动很大(流量低时超过50%),无法满足质量控制要求,不得不进行改进,并开展必要的试验和验证工作。
1 砂桩2号的注浆及控制系统
砂桩2号注浆及控制系统的组成如图1所示。水和水泥按设计的比例及控制精度称重后投入到搅拌罐中,搅拌均匀后临时存储在体积较大的储浆罐中(砂桩2号为10 m3)。按照工艺要求在处理机(喷浆口)到达指定位置时,启动泥浆泵开始注浆。注浆流量由流量计在泥浆泵出口处检测,然后反馈给PLC控制程序,经PID处理,将调节信息发送到变频器,调整泥浆泵电机运行状态,如此循环往复形成闭环控制,动态调整设定注浆流量和实际注浆流量之间的差值,以控制实际注浆流量在技术规格书许可的范围内波动。其中,流量的检测与反馈、PID参数设定和如何克服外界扰动,是注浆流量控制的关键,也是本次砂桩2号改造及调试过程中遇到的主要问题。
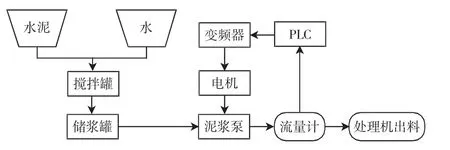
图1 砂桩2号的注浆及控制系统示意图Fig.1 Diagram of the injection and control system of No.2 sand pile
2 设备选型及影响分析
砂桩2号注浆及控制系统的主要设备型号为:
泥浆泵:选用软管泵bredel-80。
流量计:选用电磁流量计KOMETER KTM-800。
变频器:选用SOHO15VD4Y。
2.1 泥浆泵选型的影响
砂桩2号泥浆泵选用的是软管泵,不仅其脉动特性对注浆量控制有影响,其注浆能力和实际设定的注浆流量是否匹配,也是一个重要的影响因素。
软管泵的工作原理是:转轮循环压缩泵管(软管),将水泥浆连续挤压出去。软管泵的转轮在运行过程中,压紧泵管和离开泵管是交替进行的。转轮离开泵管时,泵管会因为失去压力而突然弹开,导致管内水泥浆受到的压缩推力突然消失,水泥浆会倒流进入泵管弹开的空间内,并引发“水锤”现象。由于脉动特性的存在,就每一次循环看,砂桩2号泥浆泵(软管泵)的注浆流量是不稳定的。
砂桩2号选用的bredel-80软管泵的注浆能力为0~350 L/min,单位排量为11.7 L/rad,采用V/F频率控制,通过频率(转速)大小控制变频电机的转速,从而调节注浆流量的大小。额定频率下运转最为平稳,即流量在150~200 L/min时,脉动特性较弱,瞬时流量控制相对准确。低流量下运转,需要相应降低频率,与额定频率相比降低越多,脉动特性增强也越明显,瞬时流量的波动范围会越来越大。砂桩2号注浆量控制方案改进前的实测流量波动情况如表1所示,表中数据的泥浆泵为1号泵,日期为2017年1月12日。

表1 砂桩2号泥浆泵注浆流量统计表(改进前)Table 1 The slurry injection data log of No.2 sand pile(Before improvement)
香港机场项目DCM施工工艺对注浆流量有两个要求:一是注浆作业时流量的调节范围在100~240 L/min之间;二是冲洗管路时流量的调节范围在320~350 L/min之间,两者相差太大。此外100~240 L/min的注浆作业流量调节范围也偏大。总之大流量和小流量不能两者兼顾,仅从泥浆泵的选型方面入手,很难解决问题。
2.2 流量计选型的影响
砂桩2号流量计选用的是KOMETER KTM-800电磁流量计。其工作原理是根据导电流体通过外加磁场时感生的电动势来测量导电流体流量。选择KOMETER KTM-800的主要原因是其最佳量程范围正好覆盖80~350 L/min。此外,砂桩2号科学排布了强弱电系统,供电系统安排在船尾部分,不会对船体中部的注浆及控制系统仪表产生过大干扰。还在现场对电磁流量计专门做了接地处理。电磁干扰的影响降到了最低。
2.3 变频器选型的影响
变频器常见的控制方式有两种,一种是V/F控制,一种是矢量控制。两种控制方式的主要区别在于:1)控制精度,矢量控制是闭环控制,精度较高;V/F控制属于开环控制,精度比矢量控制要低一些。2)低频扭矩,负载惯性较大,需要长期低频运转,应选用矢量控制。砂桩2号的泥浆泵转速控制精度要求高,且流量小于160 L/min时频率小于10 Hz,即大多数情况下处于低频运转状态,因此选用矢量控制的变频器是合适的。但由于改造期间没有考虑到这些问题,砂桩2号选用的是普通的V/F控制的变频器。后续改进工作也只能在此基础上进行。
3 注浆流量的PID控制
PID是工业生产中常用的一种控制方式,其作用是对控制变量进行动态调节,以减小实际输出值与设定值的差异。PID在水运工程中应用不多,但为了满足香港机场DCM施工控制要求,砂桩2号注浆流量采用了PLC中的PID模块进行控制。控制流程如图2所示。
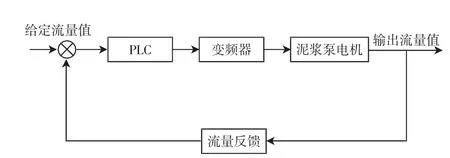
图2 注浆流量闭环控制流程图Fig.2 The close-loop control flow chart of the slurry injection
3.1 PID控制原理
砂桩2号选择了以PID参数整定为基础的注浆流量调节方式,采用下述计算公式,利用比例、积分、微分计算出控制量。

式中:e(t)为误差、控制器的输入;u(t)为控制器的输出;kp为比例系数;Ti为积分时间常数;Td为微分时间常数。其中e(t)可以看作目标流量与当前实际流量的差值,u(t)代表当前实时流量值。通过整定kp、Ti、Td3个参数,实现通过实测值实时调整设定流量与实际输出流量差值的目的。
3.2 PID具体实施方式及存在的问题
砂桩2号开始工作前,技术人员通过上位机设置不同施工阶段注浆流量的设定值。注浆系统启动后,PID也同步启动,并实时比较设定流量值与实际流量值的差异,经PID调节输出控制信号,通过变频器微调泥浆泵电机的转速,实现注浆流量的实时调节。每台泥浆泵都有3个整定参数,分别为kp、Ti、Td,通过人机交互界面的固定窗口,施工开始前由技术人员从上位机输入。砂桩2号的人机交互界面PID设定窗口如图3所示。

图3 人机交互界面PID设定窗口Fig.3 PID setting window of the MHI
由于泥浆泵性能存在一定差异,且管路长短不一、安装位置不同,因此各条注浆管线适用的PID参数也不完全一致。砂桩2号所有的整定参数都是通过试凑法确定的,需要经过一定时间的调试,才能达到比较理想的流量调节效果。
上述工作是在船厂完成的。进行外海试验时,发现注浆流量的控制效果仍然不能满足要求,因此又根据现场实际情况进行了控制方案的优化。
4 注浆流量控制方案的进一步优化
外海试验中,发现注浆流量的调节效果远不如在船厂船体稳定时的状态,具体体现在流量曲线动态误差大、调节时间过长。除去泥浆泵、变频器选型上的缺陷,分析原因有以下两个方面:1)船体摇晃及处理机钻入硬质土层,对管路内泥浆的输送平稳性及压力产生了影响,导致流量瞬时波动,产生了假的反馈输入值;2)流量计反馈对PID调节造成的负面影响,主要表现在通讯问题引发的反馈延时、流量误检测数据的干扰等。
针对以上问题,结合系统本身的缺陷,研究人员对流量调节系统进行了两方面优化:1)流量计反馈值调整:通过流量计参数设置过滤了小流量下的流量值反馈;将流量反馈值进行了平均处理,过滤了误检测的错误流量值,反馈值更加合理;2) 对PLC程序内的PID子程序进行优化,为PID子程序设置固定扫描周期和调节死区,并优化了控制逻辑。这样就解决了船体摇晃、处理机钻入硬质土层压力变化等引起的瞬时流量波动,以及通讯延时、误检测数据等对PID调节造成的负面影响。
PLC程序每个周期处理的梯级数量不固定,造成每次扫描执行的时间也是不固定的。这样采样周期不一致,采样就不精确,会干扰PID调节效果。因此研究人员为PID子程序设定了10 ms的固定扫描周期,并新增了相应设定窗口。
针对PID调节中流量稳态误差大的情况,研究人员为PID设置了调节死区。死区是指系统允许的误差值,当误差的绝对值小于设置的死区宽度时,死区的输出值为0,系统不对流量进行调节。误差的绝对值大于设置的死区宽度时,死区的输入、输出为线性关系,按正常的PID规律控制。这样就减小了PID在系统允许误差内过度频繁的调节动作,使得注浆流量的稳态误差减小。
5 改进效果
经过近两个月时间对砂桩2号注浆系统的改进和调试,DCM注浆流量的控制效果显著改善,如表2所示,表中数据的泥浆泵为1号泵,日期为2017年3月2日。
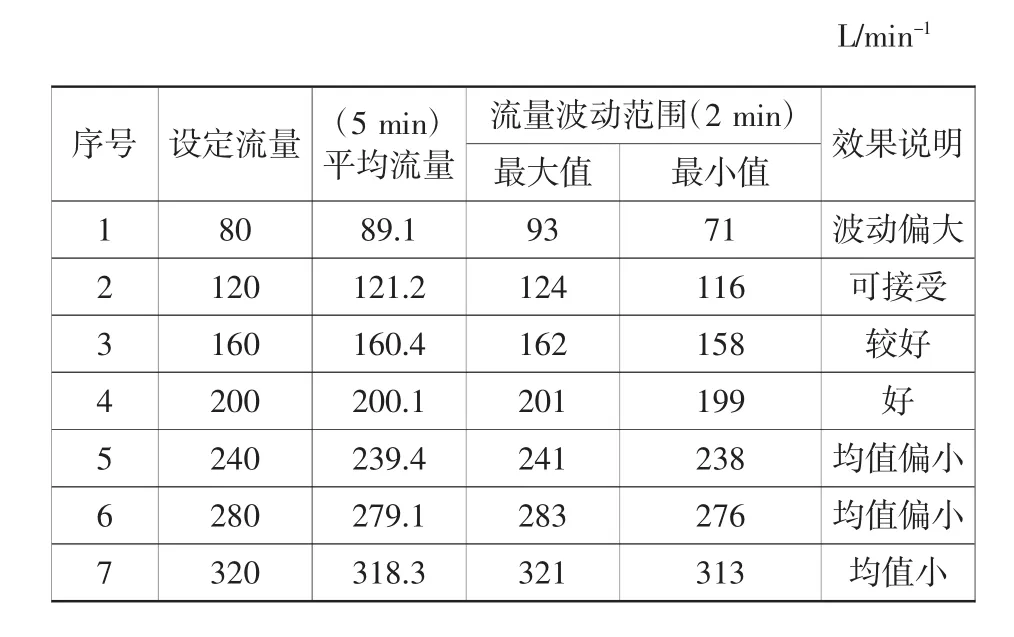
表2 砂桩2号泥浆泵注浆流量统计表(改进后)Table 2 The slurry injection data log of No.2 sand pile(After improvement)
设定流量在160~200 L/min改进效果最为理想,均值偏差小于0.5 L/min,波动范围±2 L/min。其他各流量段也都有明显改善,尤其是设定流量120 L/min时,均值偏差减小到了1.2 L/min,波动范围减小到了±4 L/min,为顺利实施香港机场DCM项目起到了非常关键的作用。
上述在香港机场项目针对DCM施工进行的研究,由于是初次开展、被动进行、时间受限,虽然达到了预期效果,也可为解决类似问题提供有益的借鉴。但由于泥浆泵、变频器选型上的缺陷,从表2也可以看出仍然存在不完美的地方,比如设定流量在80 L/min时控制效果还不够理想。在目前设备选型不变的情况下,研究人员认为在设备硬件和控制系统方面也还有值得研究和改进的地方,具备条件时将开展更深入的优化工作。
6 结语
近年来,在水运工程施工领域,中国集中引入了一批大型、专用施工装备,除本文介绍的DCM外,还有挤密砂桩、大直径钢圆筒振沉、外海深水基床高精度整平、大型海底沉管浮运安装等,其共同特点是大量应用工业自动化控制技术。在香港机场的DCM施工实践表明,工业自动化控制已是水运工程核心施工技术的重要载体,决定着整个项目的成败,应当引起水运工程界的高度重视。
参考文献:
[1]刘亚平.海上CDM施工中的几个技术问题[J].中国港湾建设,2009(4):42-45.LIU Ya-ping.Technical problems for the construction of marine CDM method[J].China Harbour Engineering,2009(4):42-45.
[2] 彭瑞.水泥深层搅拌技术的发展现状及展望[J].中国港湾建设,2009(2):77-82.PENG Rui.Status quo and trends of CDM technology[J].China Harbour Engineering,2009(2):77-82.
[3]李卫,袁德顺.CDM工法的室内试验配合比及工程特性[J].中国港湾建设,2008(5):28-30.LI Wei,YUAN De-shun.Research on laboratory mixture ratio and geotechnical properties of CDM method[J].China Harbour Engineering,2008(5):28-30.
[4] 安国利,周英,刘爱民.壁式CDM结构在码头接岸工程中的应用[J].中国港湾建设,2007(4):29-32.AN Guo-li,ZHOU Ying,LIU Ai-min.Application of wall-type CDM (Deep Cement-Mixing)in shore-connection structure of high-pile wharf at Nanjiang coal terminal of Tianjin Port[J].China Harbour Engineering,2007(4):29-32.
[5] 项国玉,于德洲.振冲碎石桩在海上防波堤工程中的应用[J].中国港湾建设,2010(4):56-59.XIANG Guo-yu,YU De-zhou.Application of vibro-replacement stone column on marine breakwater project[J].China Harbour Engineering,2010(4):56-59.
[6] 韩冉冉,王海鹏,刘横财.底出料振冲碎石桩水下施工技术[J].施工技术,2014,43(1):29-31,34.HAN Ran-ran,WANG Hai-peng,LIU Heng-cai.Underwater construction technology of vibro-replacement stone column of bottom discharge[J].Construction Technology,2014,43(1):29-31,34.
[7]BABASAKI R,SUZUKI K,SAITOH S,et al.Construction and testing of deep foundation improvement using the deep cement mixing method[J].Astm Special Technical Publication,1991(1089):10.
