三相异步电机转子斜槽度EasiMotor优化设计
2018-04-26邢国利
邢国利
( 北京超同步伺服股份有限公司,北京 101500 )
0 引言
中小型鼠笼式三相异步电动机普遍采用定子或转子斜槽的方式削弱齿谐波磁场所产生的谐波电动势,从而削弱由这些谐波磁场引起的附加转矩,改善启动性能,并降低电磁振动和噪声。韩国学者Im等计算了斜槽电机的电磁力波,对随时间变化的电磁力做离散傅里叶变换,指出在电机的设计阶段可通过设计转子斜槽角度以避免电磁力波的频率和电机共振频率重合。由此可见,研究并优化转子斜槽是有必要的。
斜槽计算,通常采用经验值,或采用庞大计算量的三维有限元分析方法,这些往往不能满足不同设计需求的工程应用。采用电机电磁场软件EasiMotor,结合电机磁路设计的快速性和有限元分析的精确性,融入优化网格剖分技术、电机驱动控制模块和有限元自动生成功能,可快速实现电机的优化设计和准确分析,提供一种方便快捷且准确的仿真中文环境。
本文采用EasiMotor软件的分段斜槽技术对不同斜槽度进行二维有限元斜槽转矩特性对比分析,找到最佳斜槽度,使转矩脉动最小,为今后此类设计提供参考或帮助。
1 三相异步电机二维有限元模型
1.1 电机参数
以三相异步电机为例,采用EasiMotor V3.1sp1软件建立电机模型,分析电机转子斜槽的优化过程。该电机的基本设计参数见表1所示。

表1 设计参数
1.2 基于EasiMotor的电机模型
首先,建立磁路计算模型。选择电机类型:鼠笼式三相感应电机,根据表1中的额定参数及其结构尺寸,建立三相异步电机磁路模型,见图1。
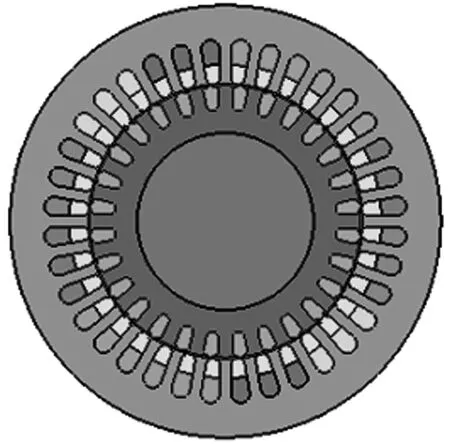
图1 电机模型
计算磁路模型,判断所建电机模型正确,磁路计算结果满足该电机设计的基本性能要求。此时,该电机的磁路计算完成。
在建模过程中找对对应的槽型,应时刻注意模型显示。EasiMotor槽型库含有较多槽型,有相近槽型,但磁路计算结果相差较多。
其次,转化为有限元模型。基于上述磁路计算的结果工况,创建二维有限元负载虚拟实验。为节约计算时间,计算采用系统默认最小周期,即四分之一周期模型,见图2。一般采用为减少剖分网格减少计算量,默认最小周期模型,也可以选择最小模型的整倍数,或电机全模型。
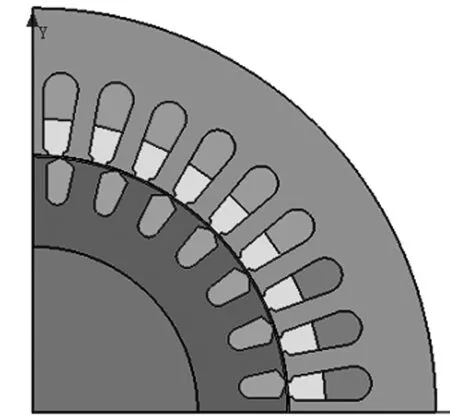
图2 有限元模型
再次,网格剖分细化。EasiMotor软件本身具有网格自加密能力,为精度需要,瞬态场网格须手动剖分或在其基础上加密、细化,如电机定转子间的气隙、定转子齿部等重点设计部位。上述电机模型加密后的网格剖分图形见图3。
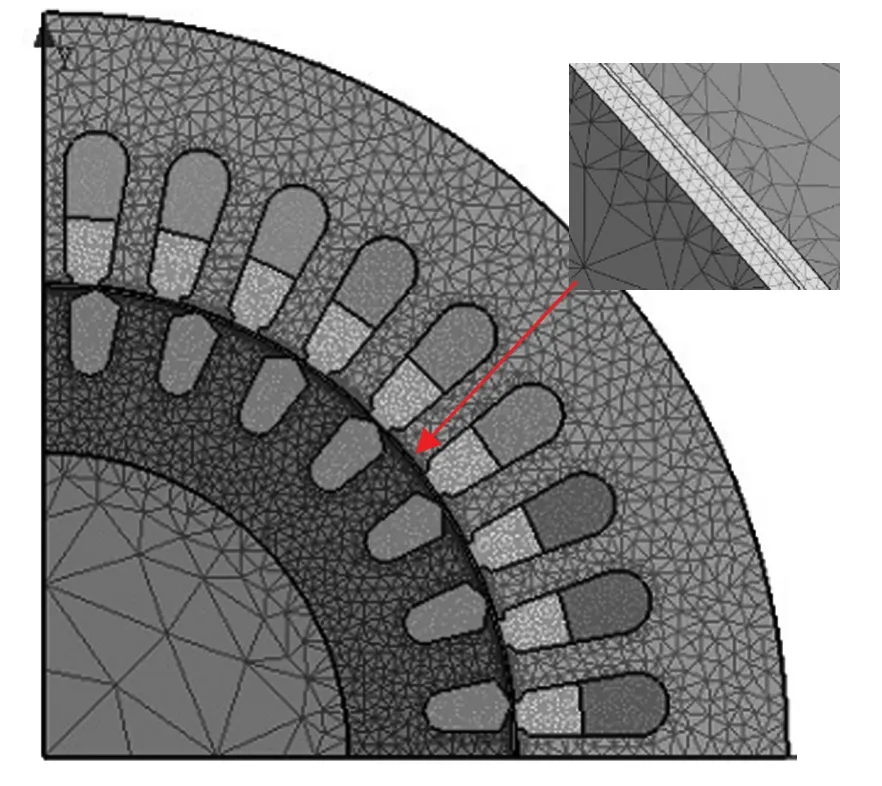
图3 网格剖分
需注意的是,EasiMotor二维有限元模型已将气隙自动分为两层(见图3放大图部分),只要增加定子侧气隙和转子侧气隙的网格数即可。定转子铁芯区域加密应适当,加密可提高精度,但必然增加计算量。
1.3 二维有限元参数设置
系统根据磁路计算结果加载完成EasiMotor有限元模型中的边界条件以及电机额定激励。本次计算主要考虑的斜槽效应,即斜槽分段数和斜槽角度设置。考虑精度与计算量,将斜槽分段数设为10段;软件默认斜槽角度为径向上一个定子齿距所占的圆心角α,即:α=360/Z1=10°,是本次设计需要优化的参数。图4为电机有限元仿真计算后的磁密云图。
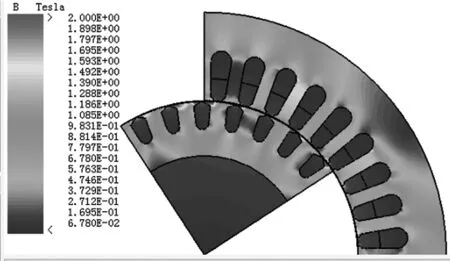
图4 磁密云图
有限元模型中边界条件及激励都已加载完成,但还需注意以下:
1)模型中,励磁电源默认为电压源,如是伺服控制需将默认电压源更改为电流源;
2)损耗设置,损耗应考虑不同区域的铁耗、铜耗;
3)瞬态参数,仿真停止时间至少设置10个周期以上,本次设置为0.4 s,为准确计算转矩脉动,将电机步长取小,步长设为一个周期的1/120,即为1.5489e-4。
2 计算结果分析
EasiMotor软件负载虚拟实验,即二维有限元计算,提供电机多种性能曲线,如绕组电压、绕组电流、铜损铁耗、转速、输出转矩等。
本次设计主要考虑三相异步电机额定转速时的输出转矩曲线(图5输出转矩曲线),以及对稳定后的曲线图做特征值后处理,计算其转矩脉动(torque ripple),如图6所示。
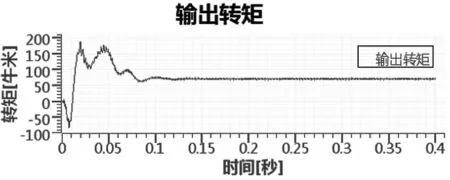
图5 输出转矩曲线
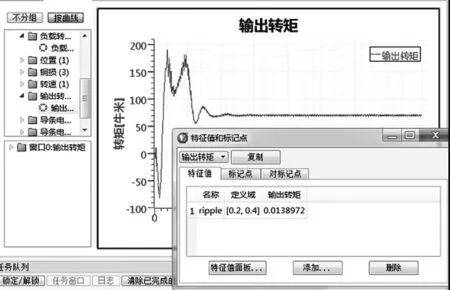
图6 转矩脉动特征值
文献[4]中提出Y2系列电机斜槽度取1~1.4倍的定子齿,以降低形成最低阶次振动力波的相带谐波与齿谐波,进而降低电动机噪声。所以本次设计斜槽度从一个定子齿=360/Z1=10°开始,从10°增至20°(相当于2倍定子齿),计算不同斜槽度下的转矩脉动,其计算结果见表2,斜槽度10°~20°转矩脉动表。
将表2数据拟合为图7斜槽度10°~20°转矩脉动图,可见随着斜槽度的增加,转矩脉动图近似开口向上的抛物线,且在15.2°~16.2°之间有极小值点。
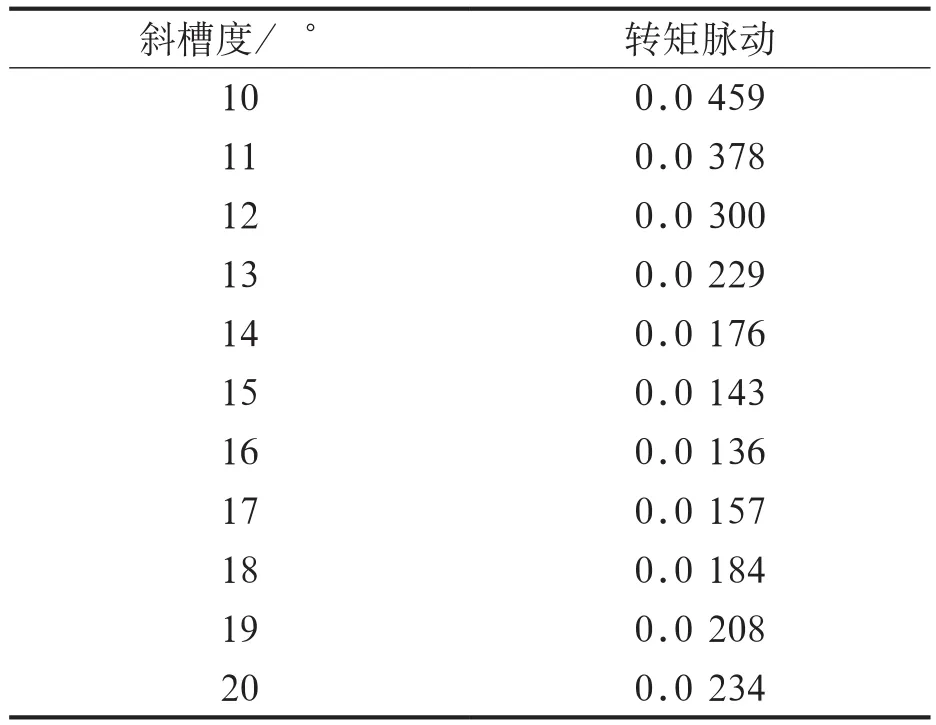
表2 斜槽度10°~20°时转矩脉动
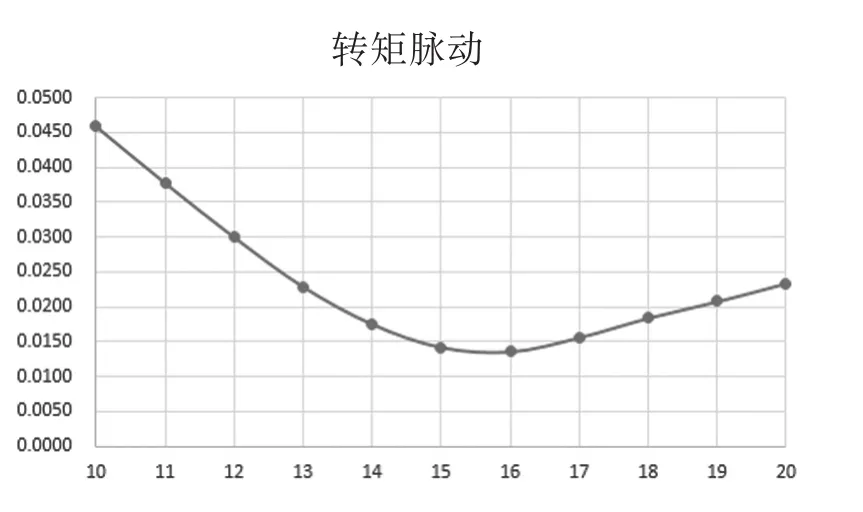
图7 斜槽度10°~20°转矩脉动
以间隔0.1°细化斜槽度15.2°~16.2°,计算分析对应的转矩脉动如表3所示,图8是对应的拟合转矩脉动曲线。
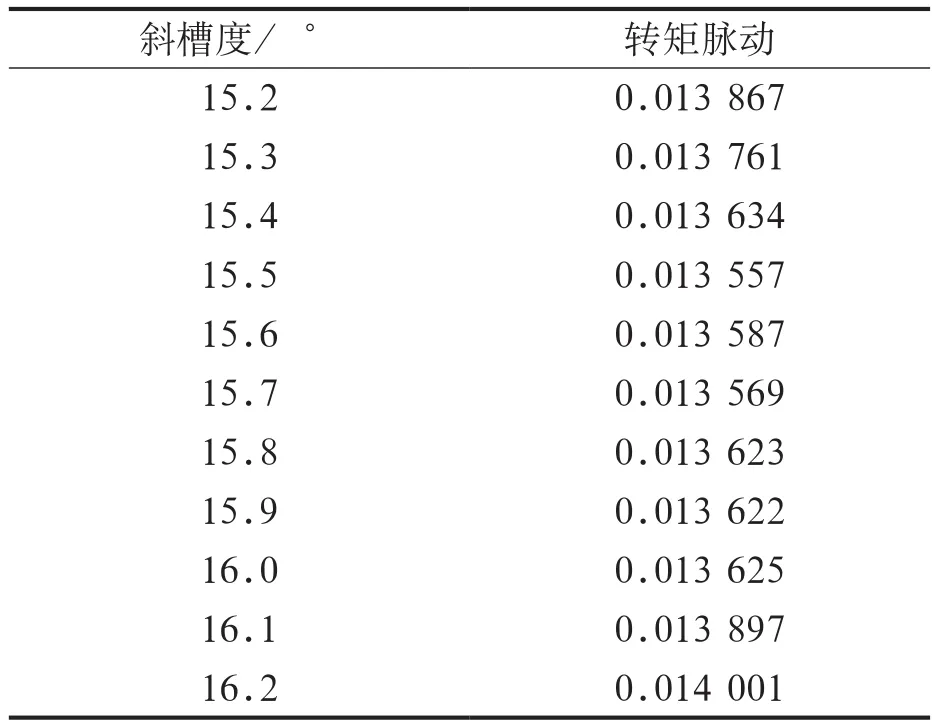
表3 斜槽度15.2°~16.2°转矩脉动
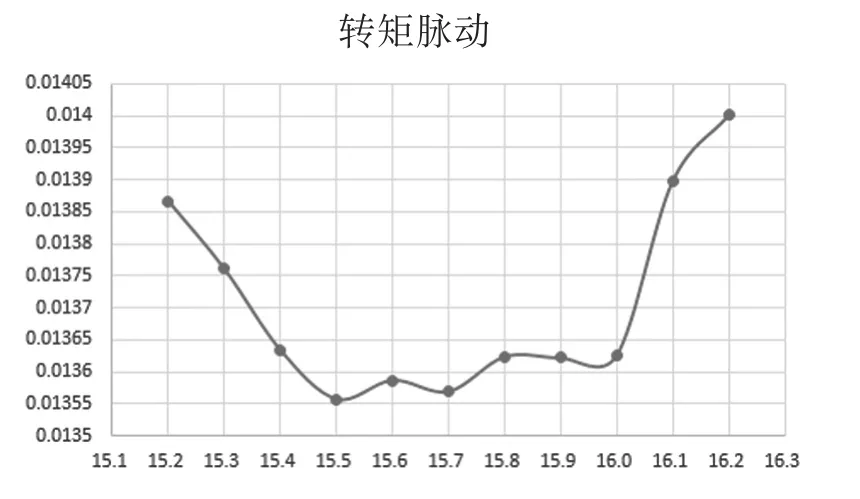
图8 斜槽度15.2°~16.2°转矩脉动
从表3和图8可以看出,15.2°~16.2°,转矩脉动极限点在0.01 356左右,且斜槽度选在15.4°~15.8°。
极值点之所以选择15.4°~15.8°为一个范围,我们要综合考虑:
一方面,有限元计算与网格的质量、剖分精细程度、网格数量密切相关,网格精度决定计算的精度,网格的数量决定计算的时间。
另一方面,中小型电机定子槽数相对较少,Y2系列斜槽公差±1.2 mm左右,所以转子斜槽度的偏差至少为0.5°。
本次细化计算的斜槽度极值点选择为15.4°~15.8°是满足工程设计要求的。
3 结论
本文通过EasiMotor软件的场路结合强大功能,完成了三相异步电动机额定转速下的瞬态仿真,详细介绍了二维有限元计算过程,对不同斜槽度下的输出转矩曲线进行转矩脉动分析对比,找到转矩脉动最小的斜槽度值,对异步电机研究、开发及优化提供帮助,有利于加快项目研发周期,降低项目研发成本。
[1]谢颖,刘海松,吕森,等.笼型感应电机电磁振动变化规律的研究[J].中国电机工程学报,2015(15).
[2]朱道萌,杨立,卢南方,等.基于三维场的斜槽电机齿槽转矩优化分析[J].现代机械,2016(4).
[3]梁文毅,陆天雄,张翔.基于分段斜槽技术的电机斜槽特性分析[J].电机技术学报,2011(11).
[4]杨永平.转子斜槽对谐波的影响[J].电机技术,2016(2).