浅谈机器人割草机项目开发中的技术要点
2018-04-26朱典悝
朱典悝
( 上海大学材料科学与工程学院,上海 200072 )
0 引言
相关预测显示,欧洲市场对于机器人割草机的需求将以每年高于20%的速度增长,至2022年,全球机器人割草机的市场规模将达到20亿美元。对于传统的园林工具生产企业和品牌制造商而言,机器人割草机市场份额的快速增长既是机会又是挑战。本文结合机器人割草机项目开发实际工作,对整机设计、结构和软硬件协同开发、测试认证及材料选用等方面进行阐述,希望能给同行提供参考意见,避免在研发过程中走弯路,从而提高效率,节省时间。
1 概述
机器人割草机是一种以微处理器(MPU)为核心、配备多个电机和传感器、按照软件程序设定,在一定条件下自主进行割草作业的机电一体化集成度较高的智能化电动工具产品,具备定时启动、自动返回基站充电、躲避障碍物、感知雨水等功能。
机器人割草机在早期发展过程中,由于没有统一的安全标准,各研发单位和研发人员均按照自己的理解进行产品研发,使得市场产品种类繁多,设计思路和结构也是五花八门。直到EN 50636-2-107:2015的正式发布,才使得该项产品设计变得有章可循。本文讨论的技术内容均在EN 50636-2-107:2015要求范围内。至于北美地区,到目前为止还未颁布机器人割草机的安全标准。
2 整机设计
针对机器人割草机的整机设计,应确定割草电机的参数和割草刀布局、行走电机参数和前后车轮布局、传感器选型布局、割草机行走路径、充电站参数布局、人机交互界面参数布局等,在此基础上才能开展微处理器的选型、硬件功能模块的电路设计和软件开发设计。
本文以切割宽度为180 mm~220 mm、采用随机行走路径的机器人割草机为例进行讨论。
目前市场上主要存在两种形式的割草刀片布局。图1所示为以Husqvarna为代表的圆刀盘带动甩刀片式刀片(一般为3片),图2所示为以Robomow为代表的多齿整体刀片。

图1 圆刀盘带动甩刀片式刀片

图2 多齿整体刀片
本文倾向采用圆刀盘带动甩刀片方案。理由如下:
1)按照EN 50636-2-107:2015第20.102.1要求,采用多齿整体刀片必需按照传统割草机要求,护罩必须低于刀片平面3 mm以上,该条款使得产品结构设计受到一定限制;
2)整体刀片的安全性较低,在极端情况下切割草坪上的物体时,更易割伤物体,刀片也更易损坏。
Escalator system length Ls and split section length A1, A2(including manual input split section length A1, A2) are calculated from SAP system.
采用甩刀片方案时应注意控制刀片的重量和转速,按照EN 50636-2-107:2015的ANNEX AA要求,刀片动能应≤2 J。
机器人割草机一般选用无刷电机,其工作时间较长,MPU需实时监测和控制电机启停、转速以及负载等参数。以切割宽度为180 mm~220 mm机器人割草机为例,割草电机额定功率为50 W左右,其空载转速为3 000 r/min~4 000 r/min,较适合于实际工况。通常该型机器人割草机整机重量为10 kg左右,设定行走速度为2 km/h,爬坡能力为20°。行走电机选用带减速齿轮箱的无刷电机组件,额定功率为30 W左右,减速后轮轴空载转速为50 r/min~60 r/min即可满足要求。也有一些企业探索将行走电机改用外转子无刷电机以取消减速箱的技术方案,这方面内容可参考CN 204046343U、CN 204994273U等技术专利。这种创新很有意义,如能实现可降低产品制造成本并延长使用寿命。
机器人割草机的车轮布局以三轮(前方一个万向轮,后方两个驱动轮)和四轮(前方两个万向轮,后方两个驱动轮)居多。三轮布局利于行走时更灵活,四轮布局利于行走时更稳定。对于前万向轮,应注意做好防水防尘密封结构。对于后驱动轮,轮皮的花纹选择较为重要,预防打滑的同时也应防止车轮压伤草皮。
碰撞和提升传感器的选用是机器人割草机结构设计和性能的重要因素。在早期的研发中采用了微动开关或相类似的机械式部件,导致结构复杂、灵敏度低、防水性能差等问题。目前较主流的方式为磁铁+HALL元件进行非接触式感应。该方式较大程度简化内部结构设计,确保机壳内部的防水密封,感应灵敏,不受使用寿命的限制。
倾角传感器可采用六轴陀螺仪,如mpu6550等,监控割草机的倾斜角度、地磁角度和主板温度,对采用随机行走路径的机器人割草机适用。
绝大多数机器人割草机行走路径为随机。加装了GPS模块的割草机可对工作区域进行分块,如将房屋前后划分为A、B两个区域并根据其面积大小分配工作时间。
作为技术发展方向之一,BOSCH推出的INDEGO机型采用平行直线行走路径。从目前来看,平行直线行走路径技术难度大、成本高,对多障碍物和孤岛等工作区域的覆盖算法尚不成熟。所以,机器人割草机随机行走路径在未来一段时间内仍是市场主流。随机路径与平行直线路径示意见图3。
在机器人割草机充电站参数和布局方面,应高度重视专利问题。Husqvarna AB在2003年申请了EP1512053B发明专利(电子定范围系统(ELECTRONIC DEMARCATING SYSTEM))并获得授权。该专利目前在德国、英国、法国、意大利、瑞典和瑞士等国有效,在其它欧洲国家已经失效。EP1512053B所保护的边界线按时间间隔脉冲信号产生方式,实际上也被目前大部分机器人割草机所采用,由此产生了一些专利纠纷。值得注意的是EP1512053B所保护的部分内容已经被iRobot公司在2002年06月12日申请的专利EP2330473B1中所公开,这使得Husqvarna专利中的部分权利要求其新颖性受到质疑。相关公司都在围绕边线的识别技术进行积极的探索和研究并获得了一些成果。
机器人割草机采用人机交互界面,早期多采用LED数码管+按键的方式,界面直观性较差,操作复杂。近几年开始采用LCD显示屏+薄膜键盘的方式(或LCD触摸屏)替代后,界面简单明了。随着互联网的发展,通过SIM卡、蓝牙或WAN等无线通讯技术,对机器人割草机的设置逐步转移到操作者手机APP中进行,可获得更多便利性。
3 软硬件协调及测试认证
早期机器人割草机使用C8051及类似单片机,随着芯片技术发展和割草机功能要求(如无线连接)的增加,越来越多的机型开始采用基于ARM CORTEX-M3架构的STM32芯片。该芯片运行速度快(72 MHz)、功耗低(36 mA)、内存大(512 K)、管脚丰富,相比51系列芯片更适合于新一代机器人割草机的功能需求,如电源管理、电机控制、人机界面、无线通讯等。
图4为以STM32F103为核心的机器人割草机系统功能框图。无刷电机的驱动模块有软件驱动和硬件电路驱动两种方法,建议采用硬件电路驱动的方法。一方面可简化割草机的软件和电机的驱动电路,另一方面可节省认证时间和费用(电机采用软件驱动,软件需单独评估)。采用硬件驱动或可导致负载变化时电机辐射峰值大,进而影响其它元器件如边线传感器工作的稳定性,这需要结构、电子硬件、嵌入式软件工程师三方协调。优化电机磁路、电机增加轭磁圈、优化边线传感器运放电路、调整软件中波峰识别值等,都是较为有效的手段。
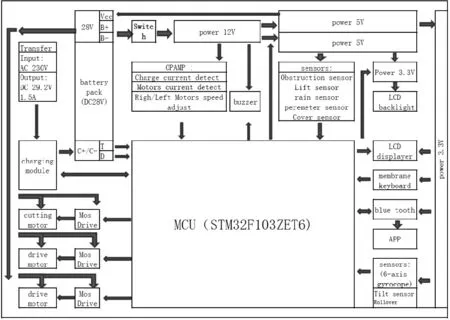
图4 机器人割草机系统功能框图(28 V平台/STM32F103)
LCD驱动也可采用两种方式,即LCD电路板自带驱动或由MCU驱动。例图中使用的STM32F103核心,借用其丰富资源,采用由MCU直接驱动相对而言更为便捷,可使系统更精简。
在标配无线连接模块的机型上,LCD显示屏可忽略。通过无线连接后,手机APP可直接对割草机进行设置并实现操作。
碰撞和提升传感器虽是采用磁铁+HALL元件的电子感应方式,但其性能和灵敏度却取决于结构工程师的设计。磁铁的磁场强度及其与HALL元件相对位置精度的控制,悬浮机壳弹性支撑结构设计和装配精度都是影响碰撞和提升传感器灵敏度的关键因素。
在机器人割草机的研发过程中,实地测试是非常重要的环节,能够帮助研发工程师找出结构、电路、软件上存在的问题,进行针对性改善。设计时一些被忽略或不确定的逻辑,往往可以通过实际测试找到答案。一些典型的问题,例如割草机返回基站时因陷入孤岛死循环,或因驱动轮打滑进入死循环,或因边线传感器对边线信号的灵敏度出错导致机器出界以及三个电机的过流保护值设定等问题,都需要结构和软硬件工程师协同努力,在测试中及时解决。图5所示为机器人割草机500 m2标准测试示意图。
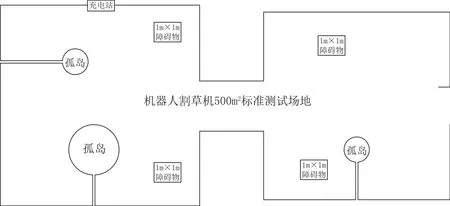
图5 机器人割草机500 m2标准测试示意
在机器人割草机产品认证方面,结构和硬件电路的认证与传统手推式割草机并无太大区别,可按照EN 50636-2-107相应条款逐一执行。对于软件评估工作,其文件整理工作量较大,且对软件语法、逻辑等都有相应条款规定,相关认证机构已针对机器人割草机提出了并行工程的要求,即:在项目开发初始阶段,联系认证机构软件评估工程师参与,对软件架构、语法、逻辑等进行规范,以提高软件评促效率,节省认证时间。
4 零部件材料选用
机器人割草机的工作环境相对苛刻,其在户外草坪上全天候待命,应可承受日晒雨淋、水雾侵蚀等自然环境。对于整机的外罩、外壳等表面零件,建议选用ASA工程塑料。
ASA由苯乙烯、丙烯腈和亚克力橡胶聚合而成,即维持了ABS的主要特性,也结合了亚克力的耐候性特点,被广泛应用在汽车、建筑、户外运动以及电子电机产品上。图6所示为LGASA LI912 WOM(人工老化)测试报告。
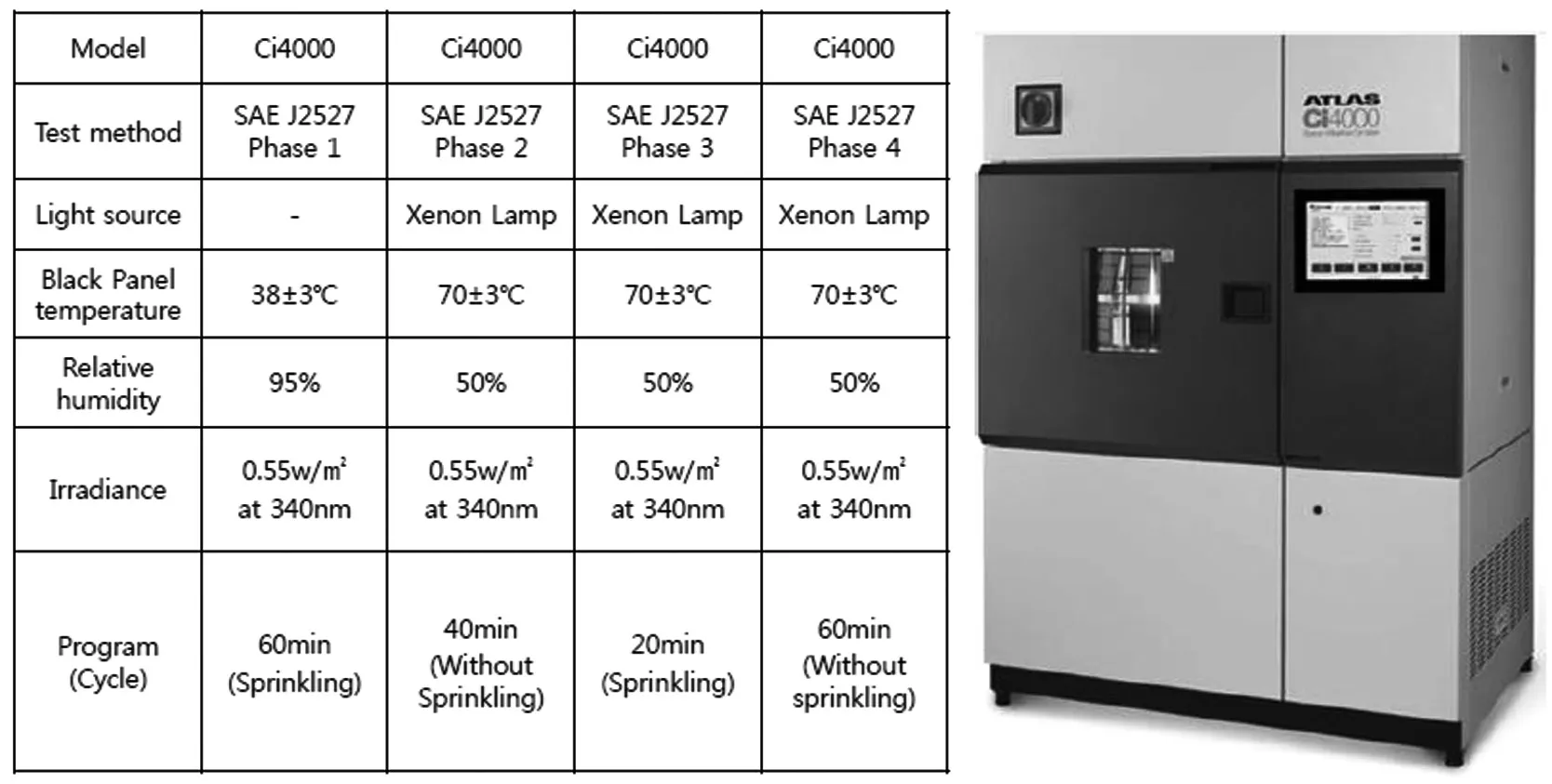
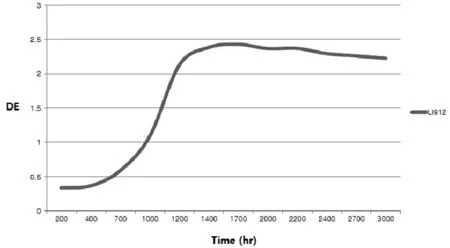
图6 LG ASA LI912 WOM(人工老化)测试报告
5 结语
机器人割草机是机电一体化集成度较高的智能化工具产品,对于传统的园林工具生产制造企业和开发人员而言都是不小的挑战。在我国,除少部分企业成功推出机器人割草机产品并进入市场,更多的企业却是因研发周期不断拖延或停滞不前甚至中途夭折。由此可见,机器人割草机项目开发时就应把握好整机设计的方向,选择BENCHMARK样机,通过市场调查确定产品定位及技术方向。研发过程中应处理好结构与电子软硬件协同开发,同时重视检测、认证以及材料选用等方面的工作。
[1]Safety of household and similar appliances-Part2-107:Particular requirements for robotic battery powered electrical lawnmowers: EN_50636-2-107:2015 [S].