结冰条件下人机环复杂系统分布式仿真方法
2018-04-26徐浩军裴彬彬吕晗阳
李 哲, 徐浩军, 薛 源, 裴彬彬, 吕晗阳
(空军工程大学航空航天工程学院, 陕西 西安 710038)
0 引 言
结冰是导致飞机失控、诱发飞行事故的重要因素之一[1]。受结冰外部环境的限制,真实结冰试飞条件要求高,难以广泛开展。结冰条件下地面飞行仿真模拟,对于研究结冰后飞行动力学特性,驾驶员感知结冰影响,训练结冰条件下的操纵具有重要意义。现有的结冰气动影响模型较为简单,多为结冰修正因子形式[2],且未考虑结冰时间对结冰程度的影响,驾驶员难以感受到真实结冰飞行情形,有必要建立随时间变化的结冰模型、构建结冰条件下实时飞行仿真系统,研究结冰飞行的安全分析方法。
人机环复杂系统实时飞行仿真是以数字化飞行器的运动情况为研究对象,结合故障模式、外部环境、飞行控制律、综合可视化显示技术等的一种面向对象的复杂系统仿真。随着仿真逼真程度的增加,飞行仿真系统中含有大量的数学模型,单台计算机无法胜任高强度实时并行计算和显示的要求。为解决这一矛盾,通过降解大型仿真系统为若干分系统,然后将分系统布置在不同节点,多机实时交互、运行仿真。运用网络技术将大量计算机连接起来,可以获得强大的解算能力及便捷的数据共享。构建分布式实时飞行仿真系统,为新机型的预研、设计、试验、优化和评估等提供了可视化的验证平台。分布式仿真系统的构造与应用,实时网络传输技术等近年来得到了广泛的发展。
实时网络传输技术最早提出是用来解决多计算协同使用过程中的数据高效实时交互问题。国外对实时网络体系结构、标准、协议等研究较早,发展了分布式交互仿真(distributed interactive simulation,DIS)、聚合级仿真协议(aggregate level simulation protocol,ALSP)、高级体系结构(high level architecture,HLA)等仿真体系结构,将构造仿真、虚拟仿真和真实仿真集成统一,满足复杂系统综合仿真的需求。实时网络技术应用很广,美国航空航天局(national aeronautics and space administration,NASA)较早地将实时网络技术应用到飞行模拟器中[3]。随后针对结冰后飞机飞行动力学仿真问题,美国伊利诺伊州大学Bragg教授运用该大学实时飞行仿真模拟器[4],研究飞机遭遇结冰后的空气动力学和飞行安全问题,提出飞机智能积冰系统(smart icing system, SIS)。NASA格林研究中心、田纳西州大学等联合研制开发了冰污染影响下飞行训练设备[5]。文献[6]联合开发了积冰污染边界保护系统(icing contamination envelope protection,ICEPro),为驾驶员提供积冰信息及飞机边界信息[6],并在地面模拟器进行试飞验证[7]。
国内对实时网络技术的应用正在推广,国防科技大学的姚新宇教授提出了基于Simulink RTW的分布式实时仿真系统构建方法[8]。北京理工大学吴嗣亮教授在卫星对抗系统中应用反射内存网络,解决了反射内存网通讯方式、HLA应用程序协调等问题,达到了仿真系统实时性的要求[9]。中国飞行试验研究院的欧杰、盛勇等人研究了飞行模拟系统的组建与验证方法,并将反射内存网络应用到试飞的实时监控中[10-11]。南京航空航天大学的杨国清在某型号任务的射频仿真系统中,采用反射内存网络技术,取得了良好的实时效果[12]。西北工业大学的高立娥等人在水下航行器半实物仿真系统中,应用反射内存实时网络技术,显著提高了仿真帧频,降低了多种仿真设备间信息传输中的信号干扰[13]。哈尔滨工业大学的袁赣南教授对反射内存网络构成的实时网络关键技术进行了研究[14]。反射内存网络的优势使其适用于分布式实时仿真控制领域,上海交通大学的王旭永教授研究了群设备间强实时性通信问题,提出了基于“xPC+反射内存网”的解决方案[15]。西北工业大学周军教授将分布式实时仿真应用于动态平衡作战仿真系统[16]。反射内存网络良好的实时性为实时系统提供了坚实的技术支撑,在复杂系统仿真、网络通讯、工业控制等领域都取得了一定的成果。
分布式飞行仿真系统由多个节点组成,各节点间需要大量数据传输。基于反射内存卡的通讯网络,能够很好地解决实时性问题。本文以某型运输机飞行仿真模拟器为研究对象,综合运用分布式仿真技术、反射内存技术、可视化技术和风险评估技术等,设计开发了开放式通用结冰条件下飞行仿真模拟器,并基于分布式实时仿真系统,研究了结冰条件下飞行安全分析方法。
1 分布式飞行仿真系统架构
根据仿真模型类型及其实现方式的不同,仿真系统分为数字仿真、半实物仿真和人在回路仿真。本文所构建的飞行模拟器采用人在回路仿真。飞行器等被控对象的动态特性通过建立数学模型在计算机上运行,实验人员通过人感系统操纵数字化模型。人在回路的仿真必须实时进行,对系统运行的可靠性、实时性提出了很高的要求。
分布式飞行仿真各节点含有复杂的迭代计算,各计算节点间需要大量时间同步的数据交互,为满足上述要求需要建立具有数据传输稳定、传输效率高、纠错能力强、延迟可预测、良好兼容性等特点的通讯网络。传统网络技术,如以太网、光纤分布式数据接口(fiber distnbuted data interface,FDDI)等组网技术存在以下弊端:①网络延迟较大,数据传输速率不高,尤其是对于大量的数据处理,实时性较差;②当网络负载较大时,传输数据延迟不可预测,易丢包,准确性较差;③网络通讯必须借助复杂的网络协议,通讯效率较低。反射内存网是一种高速、实时、可预测性的网络,可以较好地解决实时系统中数据传输的实时性问题,已在许多实时领域得到应用。传统以太网与反射内存网性能参数比较如表1所示[14]。根据分布式飞行仿真系统的实际需求,将系统的各个任务分配到节点仿真计算机,系统结构如图1所示。
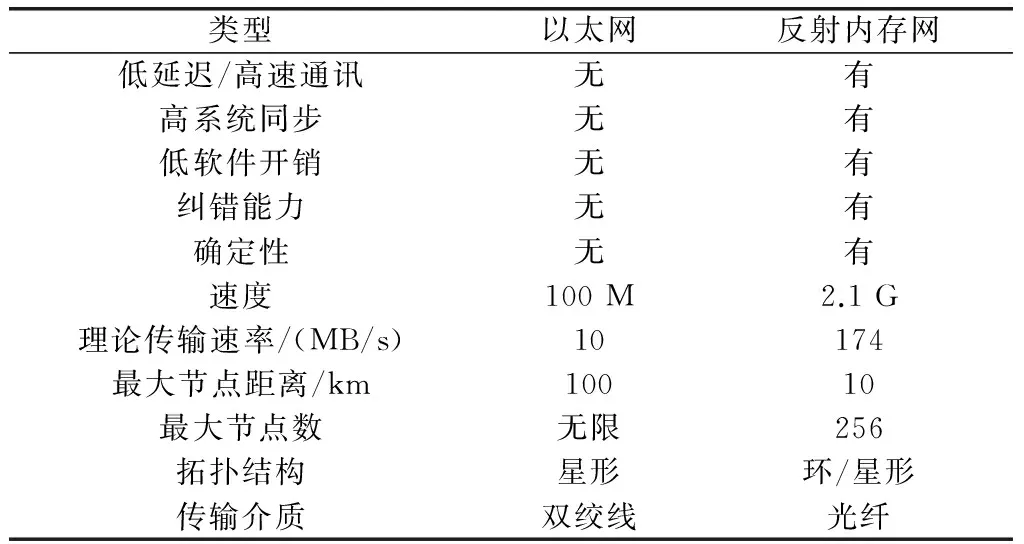
表1 反射内存网与传统以太网比较
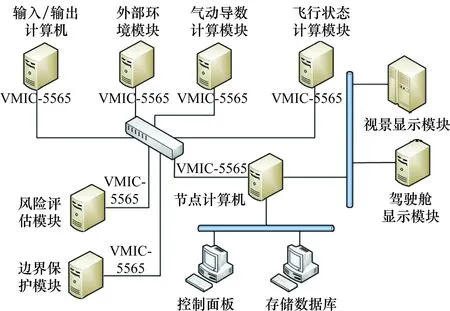
图1 分布式飞行仿真结构图Fig.1 Distributed flight simulation architecture
系统主要由模型解算、可视化显示、控制台与存储计算机组成。为满足分布式仿真实时性的要求,模型解算分为:输入输出(input-output,IO)计算机、外部环境加载、气动力计算、飞行解算、风险评估、边界保护与节点计算机。7台计算机通过多模光纤Hub互联,构成星形拓扑的反射内存网络。IO计算机主要用于驾驶员操纵的输入以及驾驶杆力等的输出。外部环境计算机包括结冰、风切边、大气紊流等模型解算。风险评估计算机通过飞行解算数据进行实时在线的风险预测,边界保护计算机进行在线边界告警。控制台由一台计算机负责,用于规划监控整个系统的运行,存储计算机用于存储飞行数据。可视化显示部分,包括一台大型视景工作站和一台座舱内显示计算机,分别负责驾驶员视角外部环境显示和驾驶舱内电子仪表的显示。由于控制台、存储计算机以及可视化显示系统不需要模型解算与强实时数据共享,通过以太网与节点计算机连接。
2 结冰飞行仿真实时通讯网络构建
实时通讯网络系统是指在规定时间内相互交联的计算机能够执行计算等处理协同异步事件的系统,完成规定任务的时间是评价该系统优劣的决定性因素。当前分布式实时系统多指硬实时系统,即每个任务均需要在规定的截止时间完成相应任务。实时网络必须具备实时操作系统,通讯的确定性与可预测性。若某节点数据传输超过时限,即便对应节点接收到相关数据,系统将认为该次数据传输无效。
2.1 基于反射内存技术的通讯网络
反射内存技术是通过局域网在互连的计算机间提供高效数据传输的技术。每个反射内存卡都有固定唯一的物理内存地址,可以插在多种总线的主板上,如VME、PCI等。现在常用的反射内存卡为VMIC-5565。该技术的基本原理类似于分布式的共享内存,每个计算机节点配置一块反射内存卡,构成高速复制内存的环状网络,如图2所示。卡上预留有双口内存,各层软件均可读、写这些内存。网络中每台计算机在向本地反射内存写入数据的同时,对应的数据和存储地址通过网络广播到其他节点的反射内存卡中的相应位置,没有总线冲突和协议耗时,网络中的每台计算机均可以在几微秒甚至纳秒级别内读取新数据。由于反射内存的数据更新仅依赖于硬件操作,仿真系统的网络延迟仅取决于网络节点个数和占用带宽比例,网络延迟的大幅缩小保证了系统实时性要求。
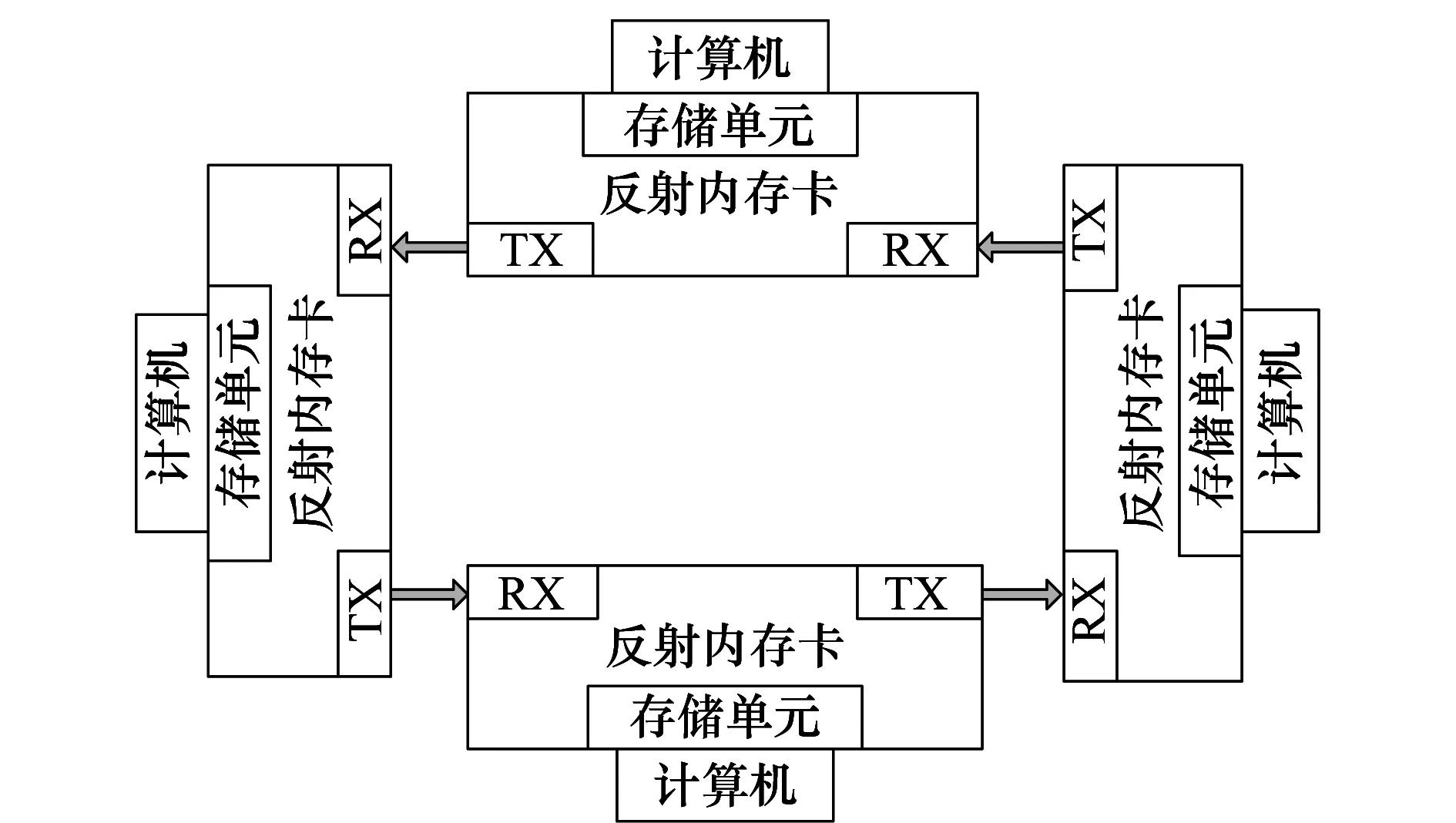
图2 反射内存网环状结构Fig.2 Ring structure of VMIC network
目前,反射内存网的拓扑结构主要包括环状和星形及其变异结构两种。环形结构不需要光纤Hub,节省了光纤使用量和设备,但网络中每个节点会有一定的延迟,且串联结构中若一个节点故障将致使整个网络瘫痪,不便于网络重组[17];星形结构中,每个节点都通过两个分别用于发送和接收的点到点链路,与Hub上的自动光纤旁路板相连,避免了单点失效引起的网络失效,实现了故障隔离,延迟较小,但光纤使用量较大,Hub故障问题不容忽视。本文采用基于星形物理拓扑的逻辑内环反射内存网结构,其中心节点为一个光纤旁路Hub,如图3所示。
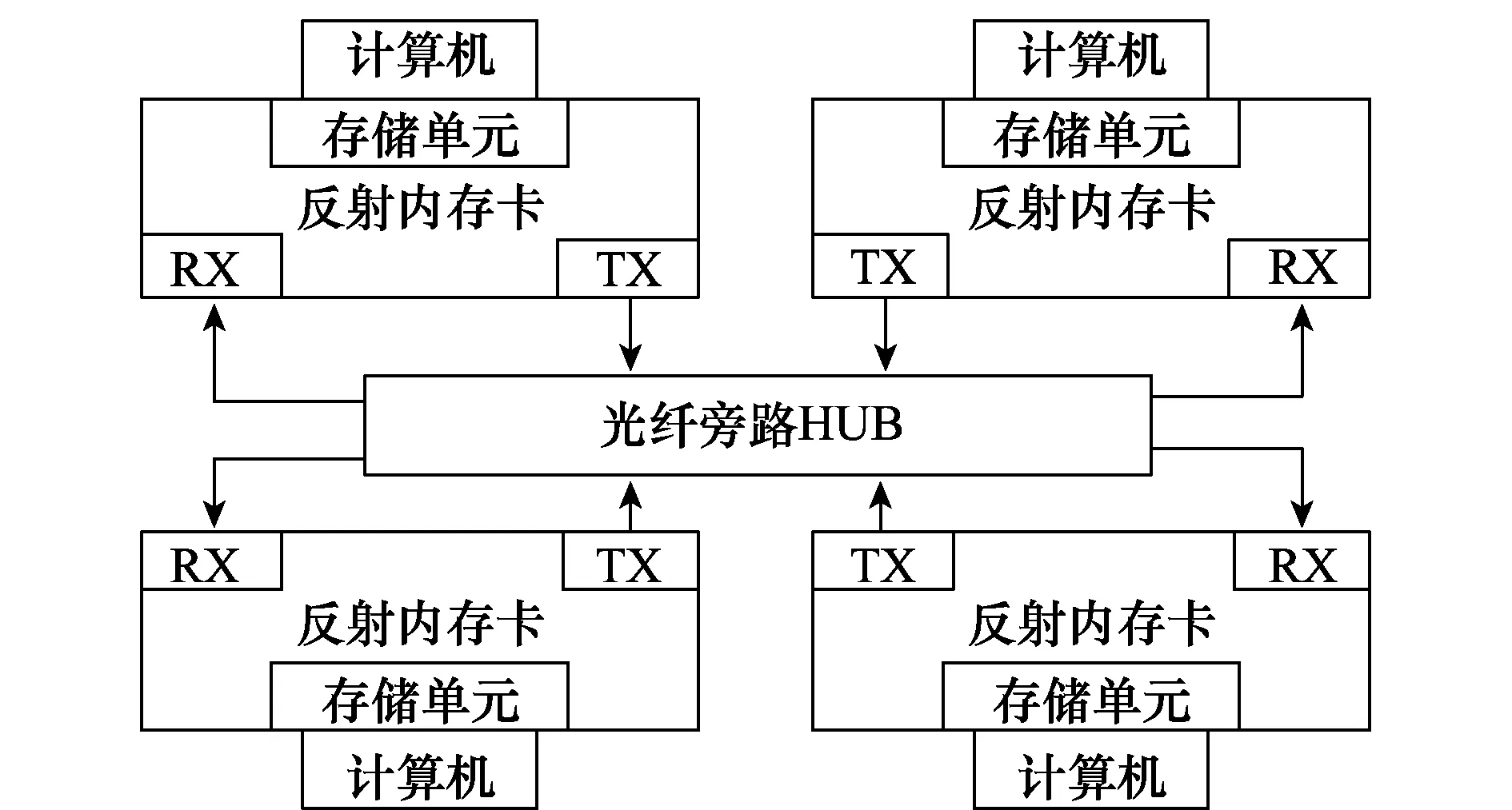
图3 反射内存网星状结构Fig.3 Star structure of VMIC network
2.2 结冰计算节点设计
外部恶劣环境因素包括:结冰、大气扰动、尾流以及风切边等。结冰条件由于受到飞行条件与飞行状态的影响,其建模较为复杂。以飞机翼面结冰为例,翼面主要影响飞机流场特性,引起飞机气动导数的变化,进而引起气动力变化,影响飞行状态。现有工程简化的结冰模型为式(1),在气动导数数据库中提取气动导数时,可通过结冰因子进行修正。
CA(ice)=(1+ηKice)CA
(1)
式中,CA,CA,ice分别为结冰前后飞机气动导数值;Kice为结冰系数,对于给定的飞机为常值,取值见文献[2];η为结冰因子,表示结冰的严重程度,与飞机参数无关。
该模型较为简单,对于结冰的情形描述不够精确。结冰条件的不同,导致最终形成的结冰几何外形不同,进而影响气动特性。以对飞机影响严重的明冰为例,明冰形成过程数据来源于NASA Gleen中心对NACA 23012翼型结冰风洞实验[18],冰形和升力系数随结冰时间变化如图4所示,图中实验条件为飞行速度200 kts,平均液态水含量0.75 g/m3,平均水滴有效直径15 μm,空气温度2.2 ℃。
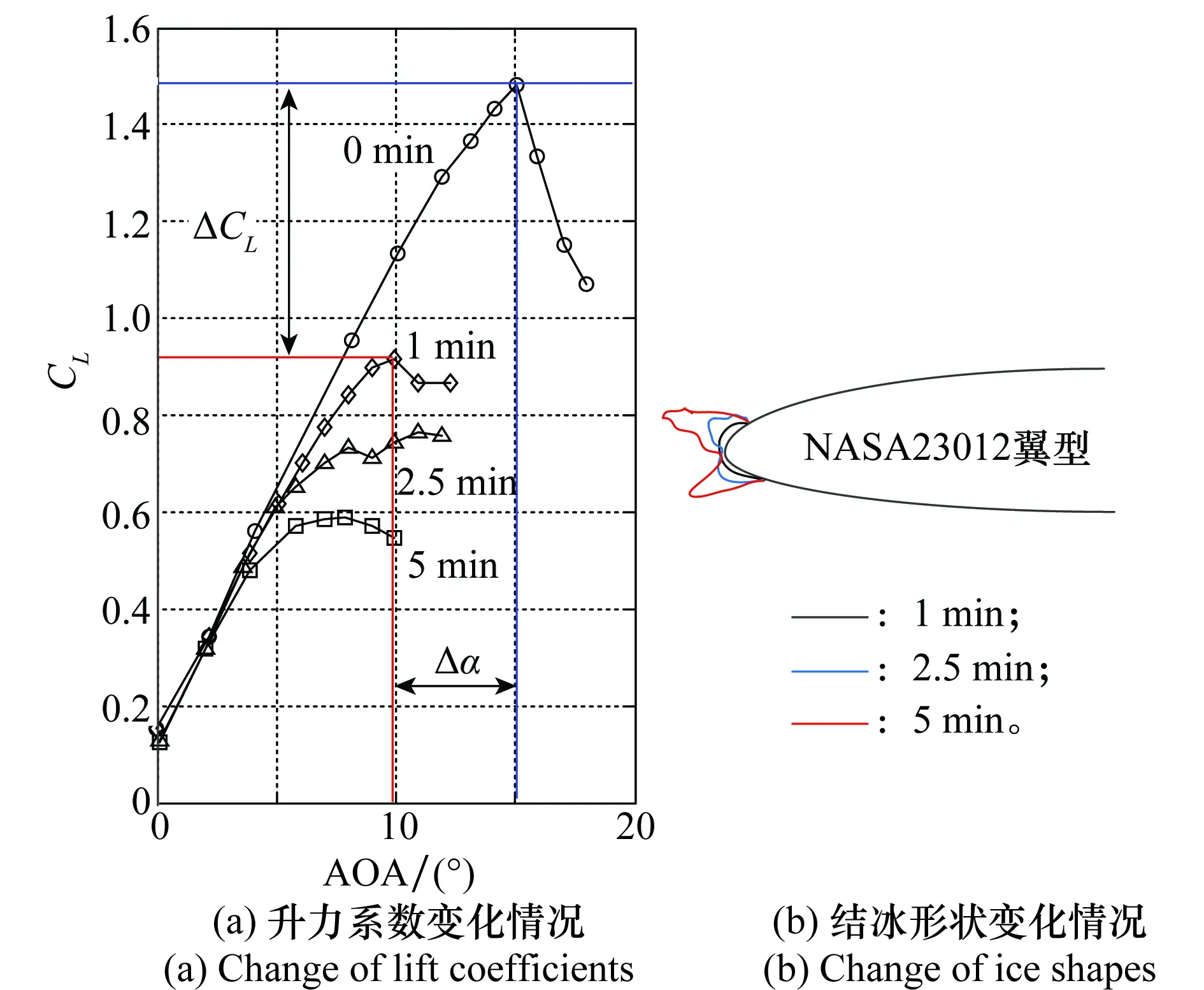
图4 NASA冰风洞升力系数实验结果Fig.4 NASA lift coefficient experiment results by ice wind tunnel
依据冰风洞实验得到的翼型升力阻力系数,估算工程所需的整机结冰气动系数[19]。结冰冰形随时间的变化及气动影响特性构成结冰气动影响数据库。因为通过结冰试飞或风洞吹风只能得到部分典型状态点的结冰气动导数,故依据试验样本点通过3次样条插值等方法,扩充结冰气动导数数据库[20],以满足各个飞行状态所需的结冰气动导数。
结冰影响模型加载在外部环境节点计算机上。需要建立以结冰环境与结冰时间为输入,结冰冰形,气动影响为输出的结冰数据库。结冰环境主要包括该空域云层的3个参数:空气温度(T)、云的液态水含量(liquid water content,LWC)和平均水滴有效直径(mean volumetric diameter,MVD)[19]。通过实时交换飞行状态数据,获取下一时刻结冰情形及对气动导数的影响,并写入反射内存卡,供气动力计算模块调用结冰后的气动导数。结冰后气动导数计算关系为
CA(ice)=f((α,β,V),(T,LWC,MVD),tice)
(2)
在研究高精度结冰飞机仿真建模时,需要建立高精度的结冰影响气动数据库模块。现有技术水平下,无论采用实验的手段还是计算流体动力学流场仿真手段,获得飞机结冰后的气动特性均需要花费大量时间,无法进行实时飞行仿真。因而在结冰控制端设定好某次飞行情形下的结冰类型,并在仿真过程中从结冰气动导数数据库中调取相应气动导数。其结冰模型模块化设计如图5所示。
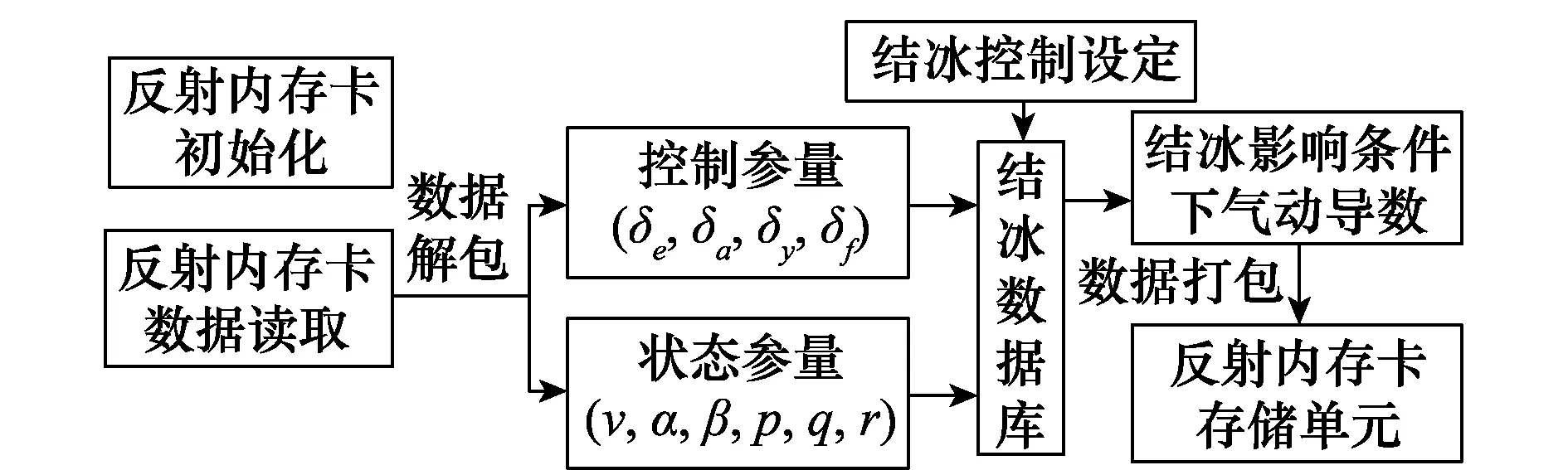
图5 结冰影响计算机的数据传输Fig.5 Data transmission in icing effect computer
2.3 飞控计算与飞行求解节点设计
根据图1,飞控计算和飞行求解部分主要包括构建模型、设计控制律、整合输入输出参数、数据模型替换和管理等。为实现仿真系统的通用性,结合分布式思想,对飞行器模型、控制律模型和输入输出参数整合模型进行模块化设计,预留标准的数据接口,便于改造和替换仿真对象。
结合背景飞机,将飞行器非线性数学模型、控制律模型和输入输出参数整合模型进行独立封装。控制律模型封装示意图如图6所示。
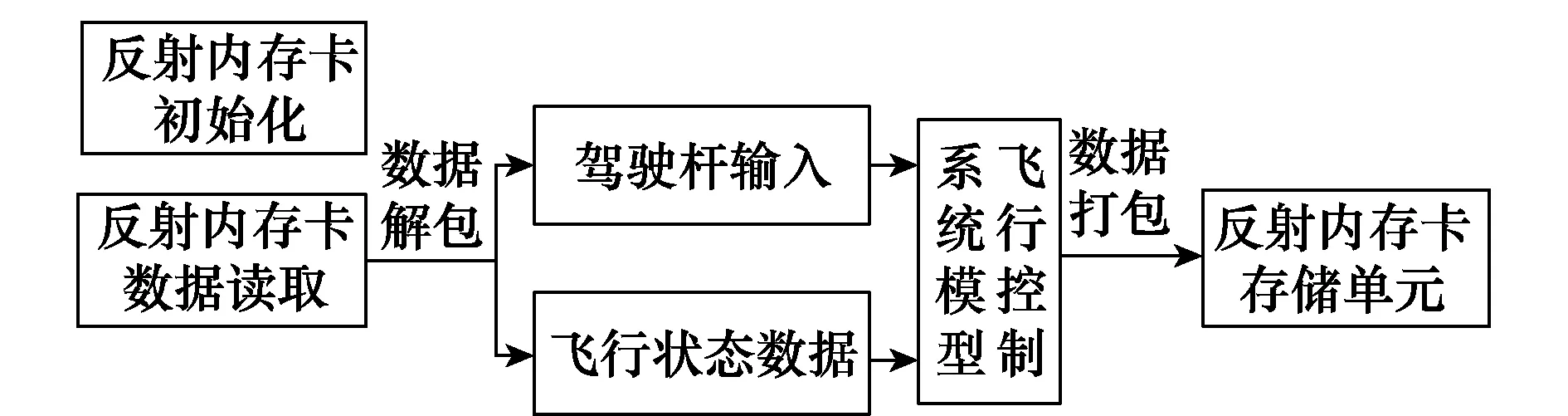
图6 控制律计算机的数据传输Fig.6 Data transmission in control law computer
模型中,控制律的输入主要包括两部分。一是由驾驶员操纵输入(如操纵杆等),通过操纵解算计算机解算并将数据分发至各反射内存卡,供控制律解算读取;二是由飞控计算和飞行求解计算机反馈的相应参数,直接广播至反射内存卡中。控制律模型计算机解算后的数据,供飞行计算、执行机构、视景显示、风险评估等节点计算机读取,构成闭环回路。
飞行解算节点进行结冰后全量方程的求解。通过控制律计算得到舵偏与油门大小,获得飞行状态变化与飞行轨迹。飞机解算方程的动力学方程与运动学方程分别为
(3)
(4)

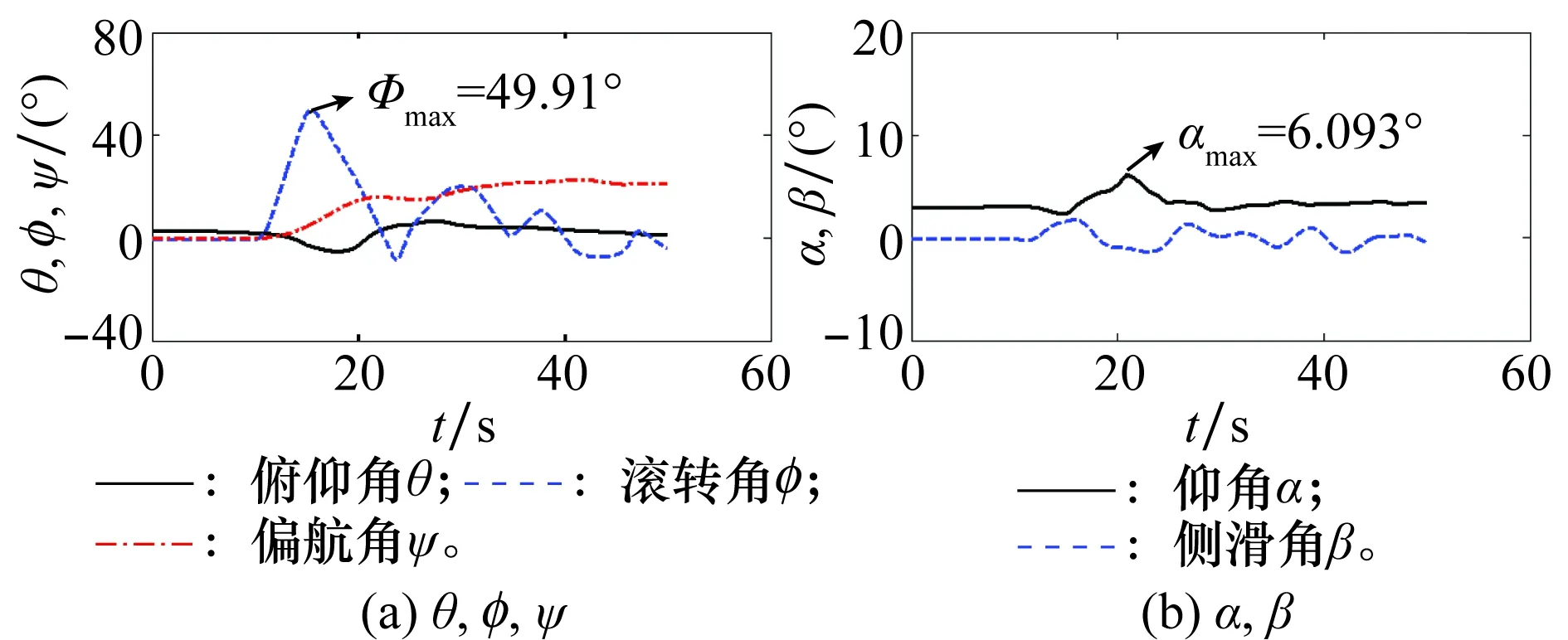
图7 非对称结冰飞行状态响应Fig.7 Flight response in asymmetric icing conditions
2.4 视景节点设计
视景计算机主要用来调度处理模型和地景,依据驾驶员输入随时改变外部环境参数、观察视角和驾驶舱内外显示画面,增加爆炸、烟雾等特殊效果。视景计算机能够接收驾驶员操纵控制信息和飞行解算计算机的实时计算数据,结合空地视景,显示飞行器的实时飞行姿态和舵面偏转情况,实时存储数据但不必反馈。视景软件框架如图8所示。
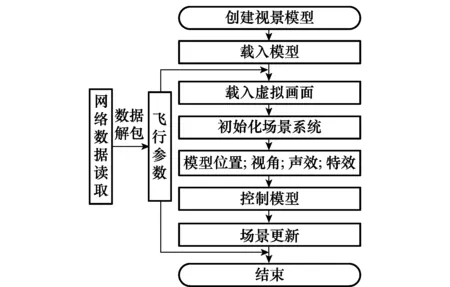
图8 视景软件框架Fig.8 Visual software framework
3 复杂飞行仿真系统工作方式
实时飞行模拟器上所配置的软件系统较为庞杂,既有状态量解算等实时性要求较强的软件,也包括教员控制、工程师管理等对实时性要求不高的软件,因此在设计网络通信架构时,需根据需求综合设计,建立合理的通信架构,满足快速、灵活性要求。
根据系统需求,强实时性要求的计算机主要包括输入输出模型、外部环境因素影响计算、气动力计算、飞行状态量解算、在线风险评估与安全边界实时解算,因此飞行仿真系统中进行与此相关的解算计算机划归为实时环内,进程控制的节点计算机也编入实时环内。编写嵌入式程序,将程序加载到Vxworks实时操纵系统的节点计算机上。座舱内的平显、视景显示系统虽具有一定的实时性要求,但飞行模拟器显示系统允许10 ms级的时间延迟,属于非强实时性,可通过千兆子网络联接;教员控制台、工程师管理等涉及人机交互界面的计算机允许的时间延迟较大,可在Windows操纵系统下运行,普通局域网进行数据交换即可满足需求。
反射内存网内各解算模块必须同步进行,复杂实时仿真系统网络由系统给流程控制计算机发送节拍指令,其同步机制:
(1) 教员控制计算节点打出仿真指令至流程控制节点计算机,并在VMIC内改写预留标志;
(2) 节点计算机通过阅读VMIC内的标志判定是否开始本模块解算,解算完毕后向VMIC保留地址标志位写入相应信号;
(3) 流程控制节点计算机综合各环内计算节点的解算情况,并与系统设定的任务时钟周期比较,若各节点在规定周期内完成解算任务,则等待下一个规定触发时刻,进行下一次解算;
(4) 若计算节点未在规定周期内完成解算,进程控制节点计算机则等待全部解算任务完成后,再等待进入下一次解算,并与时钟周期对比,顺延所有仿真解算任务,同时在管理软件中显示导致延迟的计算节点,便于统一管理与后期改进维护。实时同步时间序列的设计方案如图9所示。
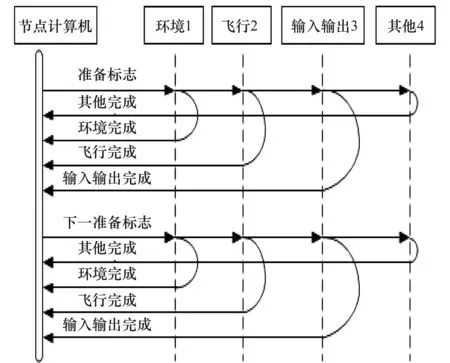
图9 实时同步时间序列Fig.9 Real-time synchronous time sequence
传统主控计算机主要进行飞行解算和流程控制等功能,但工程调试经验表明,两个强实时性解算模块耦合在一起,不便于工程管理、软件开发和后期维护改造等。背景飞机飞行模拟器采用分布式节点布置,构建实时网络数据分发架构,最大程度发挥不同功能节点的功效,提高仿真系统的通用性、灵活性。飞行状态量解算、气动力计算等计算机集中资源进行强实时性飞行解算;教员控制台等流程控制模块集中资源进行飞行仿真评估分析和数据分发配置等。各计算机分工明确,数据流向清晰可查,便于仿真系统调试和维护,仿真数据流向如图10所示。
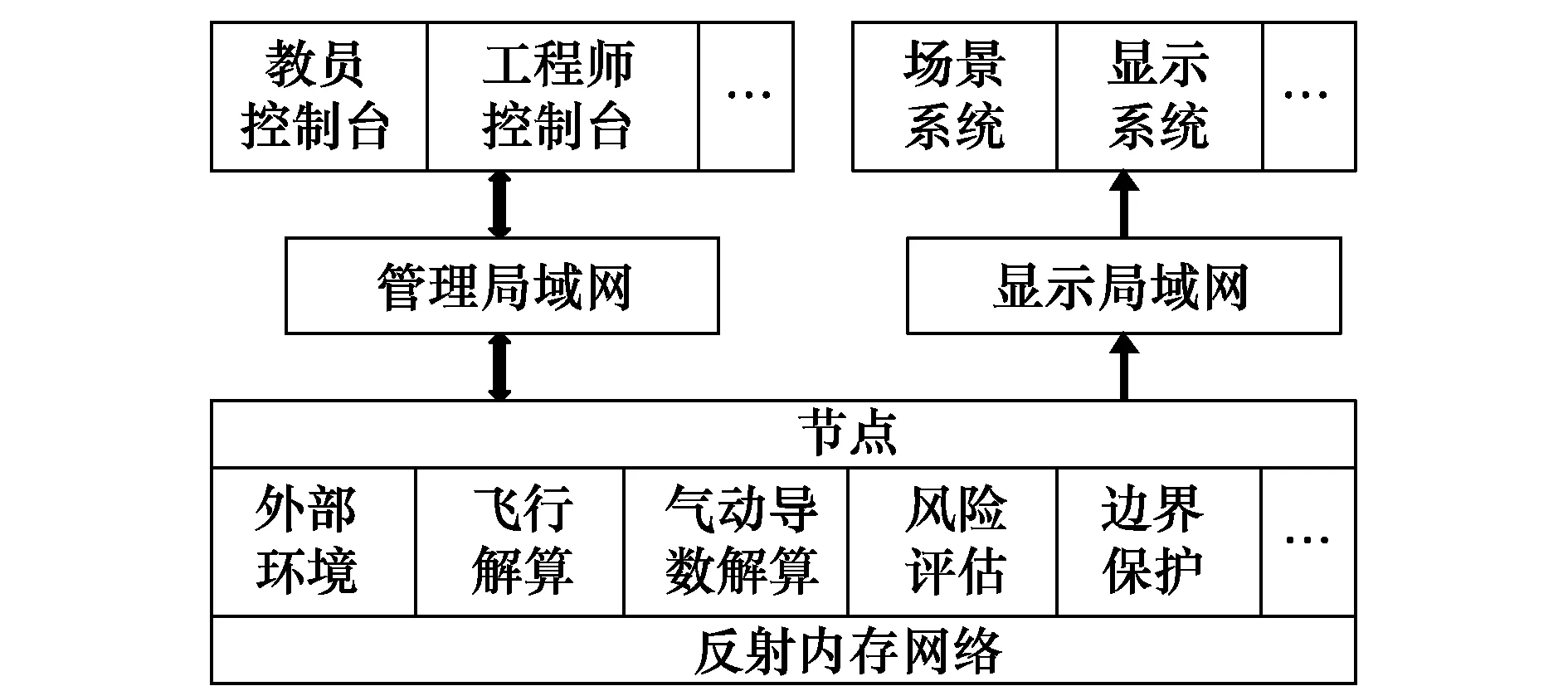
图10 仿真数据流向Fig.10 Simulation data flow
4 结冰飞行安全分析方法
4.1 风险评估
风险评估计算节点,包括风险概率定量评估与在线安全窗风险告警。风险概率定量评估是通过分析飞行状态极值参数统计特性,采用参数超限与小概率事件评估的方法对飞行风险进行定量评估。以非对称结冰仿真为例,选取迎角与滚转角为评估参数,分析参数极值样本的统计规律。采用Copula模型对二维极值参数分布模型进行描述,得到其风险概率密度分布图与累计概率分布图,如图11所示[21],X,Y轴分别为迎角极值和滚转角极值的概率分布函数,Z轴分别为概率密度和累积概率,继而得到风险概率。
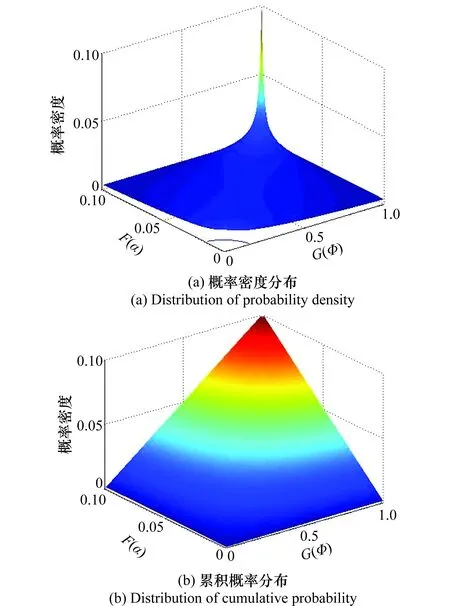
图11 概率密度与累积概率分布图Fig.11 Distribution maps of probability density and cumulative probability
在线安全窗风险告警,是通过计算机模拟仿真,对飞行状态参数数值进行等级划分,并用不同的颜色表示危险等级,得到预测时间段内单个飞行参数的安全谱,叠加各飞行参数风险度,得到该情形下的飞行安全谱,如图12所示。

图12 综合飞行情形安全谱Fig.12 Integral safety spectrum of flight situation
以遭遇对称结冰(η=0.1)和非对称结冰(右机翼η=0.1,左机翼η=0)为例,在三维空间中通过跟踪俯仰角与倾斜角轨迹进行仿真。根据飞行解算计算机计算得到的飞机状态变量的变化曲线,将各参数划分不同危险等级。对称结冰条件下,舵面失效明显,安全范围显著缩小;非对称结冰条件下,右侧舵面被污染,安全窗口形状畸变,但左侧机翼未被污染,仍有舵面效应,因此窗口面积缩小较少,如图13所示。此外,结冰随时间变化气动影响数据库建立后,可获取随结冰时间增加飞行安全窗的变化情况。不同因素之间的耦合对飞行安全的影响,同样可用安全窗展示出来,并给予驾驶员安全提示。
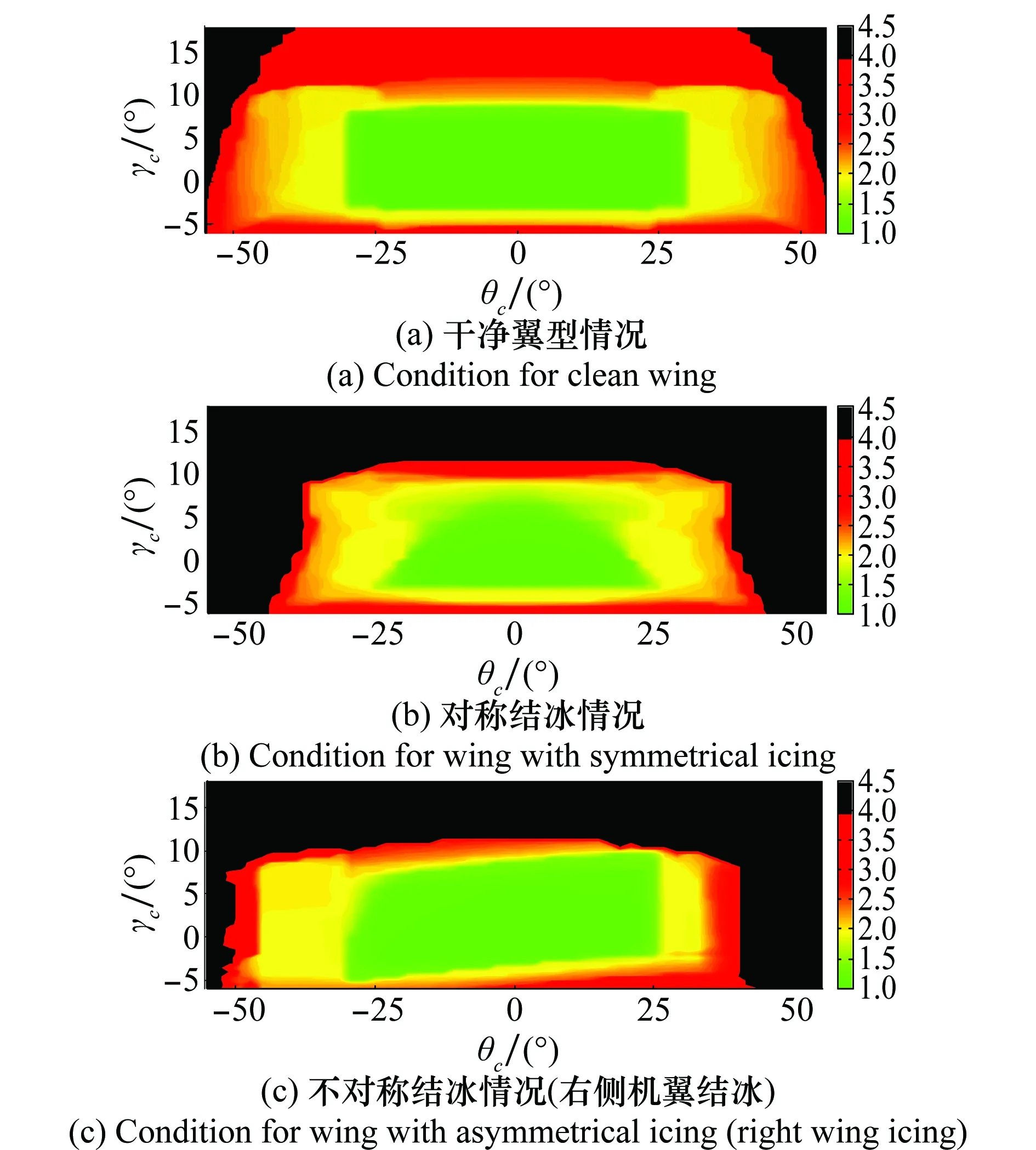
图13 平飞状态下飞行安全窗(H0=2 000 m,V0=120 m/s)Fig.13 Flight safety windows for flat flight (H0=2 000 m, V0=120 m/s)
4.2 边界保护
飞机结冰后气动导数变化,会引起飞机动力学模型参数的改变。边界保护节点,依据非线性系统分析方法,绘制状态参数的二维三维相图,判断稳定平衡状态。图14中横坐标为迎角,纵坐标为俯仰角速率,红色线条是最接近不稳定平衡点但趋向于稳定平衡点的相轨迹,由非线性动力学可知,该相轨迹构成了稳定焦点A和鞍点B的边界。红色边界左下方区域的相轨迹均最终趋向于稳定焦点A,构成稳定域;红色边界右上方相轨迹均趋向无穷远处[22]。因此在迎角小于失速迎角时,仍然要考虑俯仰角速度的许用范围。

图14 飞机结冰后纵向运动相平面图(α=0.254 8 rad)Fig.14 Phase plane of icing aircraft longitudinal motion (α=0.254 8 rad)
图15为纵向运动中平衡点稳定域随结冰因子的变化,用于动态评估飞机在某一平衡点抗扰动的稳定范围。通过非线性系统流形法[23],可绘制基于迎角、速度、俯仰角速度构成的三维稳定域。稳定域的大小表示,平衡点受到扰动后,能恢复原平衡的稳定范围。由图15可以看出,随着结冰因子的增加,稳定域逐步缩小,表明随着结冰程度的增加,飞机抗干扰的能力越来越弱。η从0.1~0.3的变化过程中,飞机经历了弱结冰至强结冰的过程,稳定域范围缩减明显;在强结冰后(η>0.3),稳定域范围已缩减严重,随着η值的增加,稳定域缩减效果逐渐降低。
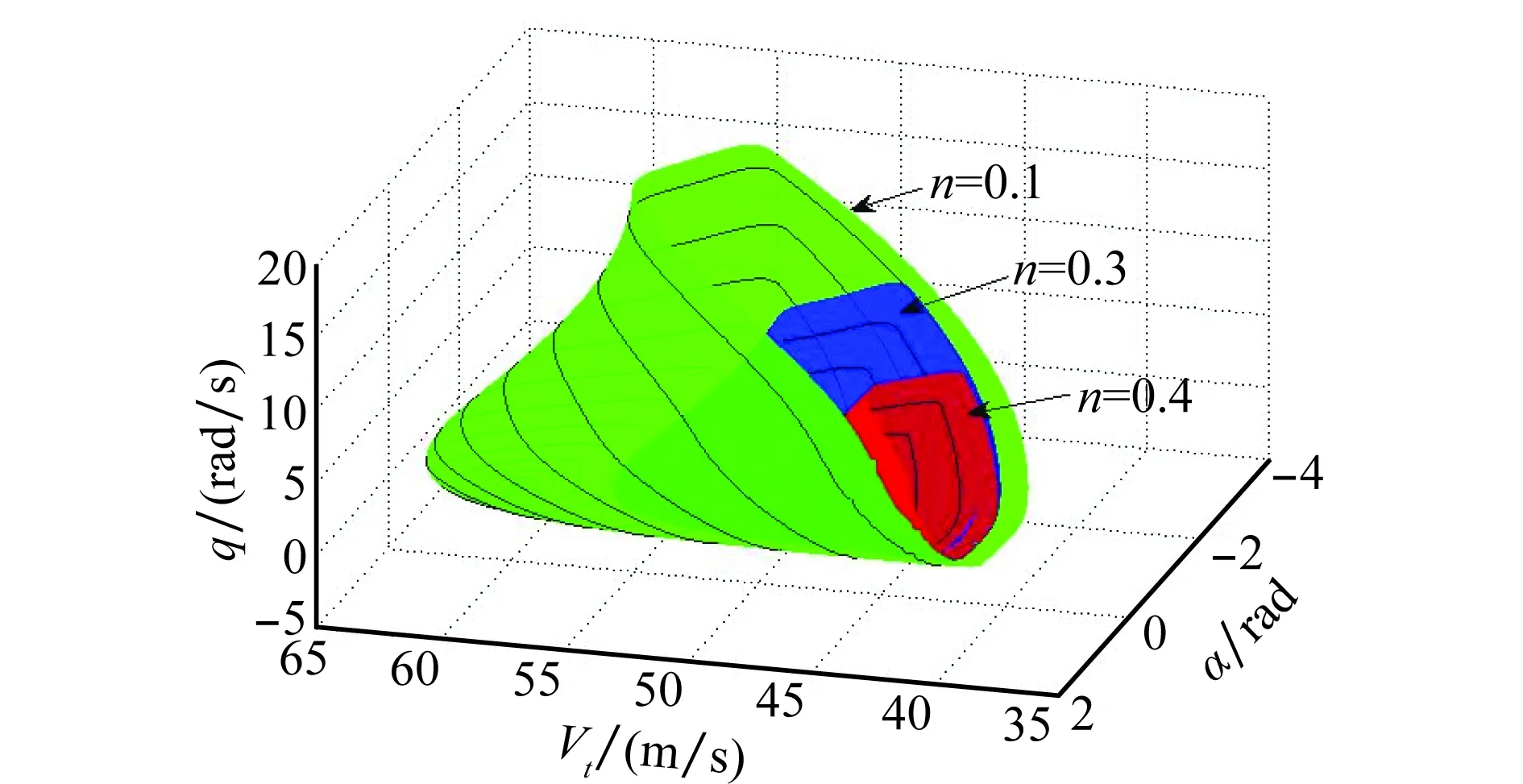
图15 飞机结冰后纵向运动稳定边界Fig.15 Stability boundary of icing aircraft longitudinal motion
5 结 论
本文主要对结冰条件下基于人机环分布式实时飞行仿真系统的构建以及安全分析方法进行了研究。构建了以反射内存通讯网络为基础,结合以太网的分布式实时仿真系统。仿真系统采用了7个模块化的网络节点,便于各模块单独开发,以及后期飞行包的维护、更改和替换,拓展飞行模拟器的使用范围。并对飞行仿真系统的工作方式与时间同步方法进行研究,满足了飞行仿真实时性的要求。
基于该仿真平台,能够直观地研究不同结冰条件和不同飞行状态下的飞行安全参数变化趋势,确定结冰诱发飞行风险中的飞行动力学原因。通过关键飞行安全参数风险度的综合所构建的飞行安全窗,与结冰后稳定域的计算,对在线预警飞行风险、提高驾驶员的情景感知能力具有重要作用。
下一步研究中,进一步完善结冰气动导数数据库,增加气动导数的插值密度;完善多种外部环境因素叠加影响下的飞行模拟过程,对多因素耦合作用下的飞行安全分析提供平台支撑。
参考文献:
[1] ANDREW L R. Examination of icing induced loss of control and its mitigations[R]. USA: NASA/TM—2010-216912, 2010.
[2] BRAGG M B, HUTCHISON T, MERRET J. Effect of ice accretion on aircraft flight dynamics[J].Journal of Pediatric Hematology/Oncology, 1999,21(2):136-141.
[3] CLEVELAND J I, SUDIK S, GROVE R. High performance real-time flight simulation at NASA Langley[C]∥Proc.of the 4th National Technology Transfer Conference and Exposition, 1994: 456-462.
[4] BRAGG M B,VBASAR T, PERKINS W R, et al. Smart icing systems for aircraft icing safety[C]∥Proc.of the AIAA Aerospace Science Meeting & Exhibit,2008.
[5] ROBERT W D, GLEN A D. Icing encounter flight simulator[J]. Journal of Aircraft, 2006, 43(5): 1528-1537.
[6] GINGRAS D R, BARNHART B, RANAUDO R, et al. Deve-lopment and implementation of a model-driven envelope protection system for in-flight ice contamination[C]∥Proc.of the AIAA Guidance, Navigation and Control Conference, 2010.
[7] RANAUDO R, MARTOS B, NORTON B, et al. Piloted simulation to evaluate the utility of a real time envelope protection system for mitigating in-flight icing hazards[C]∥Proc.of the AIAA Atmospheric and Environments Conference, 2010.
[8] 石仁星.基于Simulink RTW的分布式实时仿真关键技术研究[D].长沙: 国防科技大学, 2011.
SHI R X. Key technical research of distributed real-time simulation based on simulink RTW[D]. Changsha: National University of Defense Technology, 2011.
[9] 李海,吴嗣亮. 基于HLA和反射内存网的半实物卫星对抗仿真系统[J]. 系统仿真学报, 2006, 18(6): 1520-1523.
LI H, WU C L. Hard-in-the-loop simulation system of communication satellite countermeasure based on HLA and reflective memory network[J]. Journal of System Simulation, 2006, 18(6): 1520-1523.
[10] 欧杰,李岑. 某型飞机模拟仿真系统组建和研究[J].硅谷, 2014, 151(7): 55-57.
OU J, LI C. Form and research of an aircraft analog simulation system[J]. Silicon Valley, 2014, 151(7): 55-57.
[11] 盛勇,白光丰,范旭明. 实时反射内存网络在试飞实时监控系统中的应用[J]. 计算机测量与控制, 2014, 22(7): 2297-2300.
SHENG Y, BAI G F, FAN X M. Application of reflective memory network in flight real-time monitoring system[J]. Computer Measurement and Control,2014,22(7):2297-2300.
[12] 杨国青.射频仿真实时控制系统的设计与应用[D].南京:南京航空航天大学,2011.
YANG G Q. Design and application of RF simulation real-time control system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011.
[13] 高立娥,康凤菊,王彦恺. 一种基于反射内存实时网络的半实物仿真系统[J].计算机仿真, 2004, 22(3): 29-32.
GAO L E, KANG F J, WANG Y K. A hardware-in-the-loop simulation system based on reflective memory real-time network[J]. Computer Simulation, 2004, 22(3): 29-32.
[14] 纪红. 基于反射内存网络的实时网络关键技术的研究[D]. 哈尔滨: 哈尔滨工业大学, 2013.
JI H. Research on the key technology for real-time network based on reflective memory network[D]. Harbin: Harbin Engineering University, 2013.
[15] 扬飞鸿,王旭永,陶建峰. 基于xPC和反射内存网的半实物仿真[J].上海交通大学学报, 2010, 44(7):892-896.
YANG F H, WANG X Y, TAO J F. Hardware-in-the-loop simulation based on xPC target and reflective memory network[J].Journal of Shanghai Jiaotong University,2010,44(7):892-896.
[16] 熊嵩,周军,呼卫军.基于扩展HLA的作战系统动态平衡仿真[J].系统工程与电子技术, 2014, 36(4): 789-794.
XIONG S, ZHOU J, HU W J. Dynamic balancing combat system simulation based on extended HLA[J]. Systems Engineering and Electronics, 2014, 36(4): 789-794.
[17] 冯炳灿,孔德仁. 反射内存网络在实时测控系统中的应用[J].计算机测量与控制, 2011,19(1):60-62.
FENG B C, KONG D R. Application of reflective memory network in real-time measurement and control system[J]. Computer Measurement & Control, 2011, 19(1): 60-62.
[18] BROEREN A P, BRAGG M B, ADDY H E, et al. Effect of high-fidelity ice accretion simulations on the performance of a full-scale airfoil model[C]∥Proc.of the 46th AIAA Aerospace Science Meeting & Exhibit, 2008.
[19] 徐浩军,李颖晖,李哲. 飞行安全理论与分析[M]. 北京: 科学出版社, 2017: 190-206.
XU H J, LI Y H, LI Z. Flight safety theory and analysis[M]. Beijing: Sciences Press, 2017: 190-206.
[20] FIKRET C, RAHMI A. Aircraft icing detection, identification, and reconfigurable control based on Kalman filtering and neural networks[J]. Journal of Aerospace Engineering, 2008, 21(2): 51-60.
[21] WANG X L, XU H J, XUE Y. Flight risk assessment in icing conditions based on multivariate extreme value theory[C]∥Proc.of the 25th European Safety and Reliability Conference, 2015:665-673.
[22] 屈亮,李颖晖,袁国强,等.基于相平面法的结冰飞机纵向非线性稳定域分析[J].航空学报,2016,37(3):865-872.
QU L, LI Y H, YUAN G Q, et al. Analysis of longitudinal nonlinear stabilizing region for icing aircraft based on phase-plane method[J].Acta Aeronautica et Astronautica Sinica, 2016,37(3): 865-872.
[23] 李殿璞. 非线性控制系统[M].西安:西北工业大学出版社,2009:94-140.
LI D P. Nonlinear control system[M]. Xi’an: Northwestern Polytechnical University Press, 2009: 94-140.
