基于改进MAP方法的气象雷达风电场杂波抑制
2018-04-26何炜琨王晓亮吴仁彪
何炜琨, 高 丽, 王晓亮, 吴仁彪
(中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300)
0 引 言
风力发电作为一种清洁可再生能源,已得到世界各国广泛关注。近十多年来,我国风电累计装机容量飞速增长[1-2]。研究表明,风电场对其附近的气象观测设备可能会产生较为严重的影响。气象雷达风电场杂波抑制技术的研究,对于提高气象目标参数估计的准确性,减少气象目标的误检测和误跟踪,保证民航飞行安全具有重要意义。气象雷达风电场杂波抑制技术主要从风轮机设计、雷达设备和雷达信号处理技术3方面展开。风轮机设计及雷达设备相关的干扰抑制技术在一定程度上会降低风能的利用率,受限于周围的地理环境,甚至可能导致成本的增加,其应用局限性较大。与雷达信号处理技术相关的抑制技术主要围绕凝视和扫描两种工作模式展开,凝视模式下杂波抑制方法主要包括Radon变换法[3]、中值滤波法[4]、匹配追踪算法[5]以及利用风轮机杂波时域周期特性来实现风电场杂波的抑制[6]。上述抑制方法要求雷达驻留时间较长。扫描模式下的杂波抑制方法主要包括Kong等提出的自适应谱处理算法[7],Feng提出的距离多普勒回归(range-Doppler regression,RDR)算法[8],奥克拉荷马大学气象研究中心利用散射仪遥测系统基于自适应算法抑制风电场杂波[9],Yan等提出的基于自适应滤波器(如维纳滤波器等)的风电场杂波抑制方法[10]以及Frank等提出的信号分离法[11]等。上述算法均是基于一次回波数据(Level I数据)进行的,且算法复杂度较高。Kong在2014年提出利用二次(Level II)数据基于最大后验概率(maximum a posterior,MAP)的风电场杂波抑制技术[12]。该方法利用高仰角未受风电场污染区域数据的统计特性作为先验信息来抑制风电场杂波。对于气象雷达而言,除最低仰角外,不同体扫模式包含多个高仰角扫描数据,高仰角扫描数据的选取对于算法性能的提升至关重要,然而文中没有给出选取雷达高仰角数据的方法,且没有给出在只利用二次数据的前提下能够有效评价算法性能的定量性能评价指标。
本文在传统MAP算法的基础上,利用雷达与风电场的地形信息,对传统MAP算法中的高扫数据进行筛选,改善风电场杂波抑制效果。除此之外,针对气象雷达的不同体扫模式,给出相应的定量评价指标,对文中风电场杂波抑制算法的性能进行细致的分析和定量评价,验证本文算法的有效性。
1 传统MAP算法
MAP是Kong提出的一种杂波抑制算法。传统MAP算法认为气象雷达在低扫时能够照射到风电场,而在高扫时风电场杂波不在雷达扫描区域内。图1给出了美国堪萨斯州Dodge市的KDDC气象雷达在同一时刻不同仰角扫描时得到的同一区域的气象雷达反射率因子。从图1中显然可以看出,低仰角扫描(简称低扫)时可以明显看到Gray County风电场杂波(如红色圆圈的区域),而高仰角扫描(简称高扫)时该风电场杂波不再明显。
MAP算法利用高扫的数据(未被风电场污染)作为观测数据,低扫的数据(受风电场污染)作为待估计区域。根据气象目标的反射率因子、径向速度以及谱宽等参量随距离连续分布特性,利用未污染区高、低仰角扫描时相应气象目标参量的统计特性(后验概率分布),根据受污染区内每一个高扫单元的被估参量的观测值来估计受污染区内相应低扫单元的参量,如式(1)所示:
(1)


图1 VCP21模式下KDDC雷达相同扫描时刻的Level II数据Fig.1 Level II data of KDDC radar at the same scan time in VCP21 mode
由式(1)可知,在MAP算法中,首先计算未受风电场污染区域的高、低仰角气象目标相应参数的后验概率分布p(XL|XH),其次根据污染区高扫下的气象目标参量值,在后验概率分布p(XL|XH)中找到使p(XL|XH)最大时的XL并将其作为污染区相应位置的气象目标参量估计值,算法流程图如图2所示。
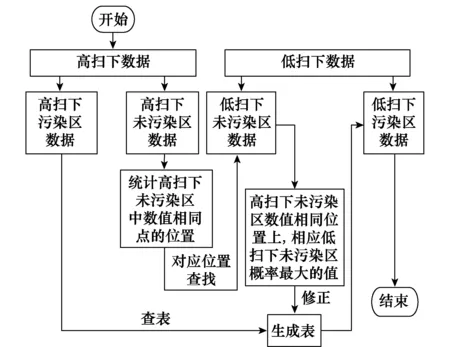
图2 MAP算法流程图Fig.2 MAP algorithm flow chart
2 改进的MAP算法
在传统MAP算法的基础上,本文做了两个方面的改善。首先,利用气象雷达和风电场位置以及雷达参数等信息,计算气象雷达在不同仰角下的雷达波束范围,将其作为先验信息来选取有效的高仰角扫描数据,以此来改善风电场杂波的抑制效果;其次,考虑到不同仰角扫描区域内气象目标径向速度的变化较快进而影响抑制效果的问题,利用同一仰角扫描区域内,径向速度随距离连续变化的特性,利用低仰角扫描下的未污染区数据作为先验信息对抑制后的径向速度进行修正,提高算法的抑制性能。
2.1 气象雷达波束高度的计算
由于雷达仰角以及雷达波束宽度的关系,使得风轮机即使处于雷达视线距离范围内,也可能不会对雷达产生影响,例如,风轮机高于或低于雷达波束高度,都不会对雷达产生影响。
雷达波束示意图如图3所示,在考虑雷达与风电场所在地形海拔高度影响的条件下,可通过相应几何关系计算得到雷达波束的照射范围,如式(2)~式(6)所示[13]。

图3 雷达波束示意图Fig.3 Radar beam diagram
根据余弦定理,可利用式(2)计算风轮机与雷达之间的夹角:
(2)
式中,R为地球半径;d为风机距雷达的距离。
利用正弦定理得到雷达波束关系:
(3)
(4)
式中,h1和h2分别代表雷达波束上下表面的高度;hr表示雷达高度;φ0表示雷达仰角;θ0表示雷达波束宽度。将式(3)、式(4)化简,可得在距离雷达d处的上下波束高度:
(5)
(6)
雷达用不同仰角扫描风电场及其周围气象目标,会出现风轮机低于最低雷达波束、风轮机处于最高雷达波束与最低雷达波束之间、风轮机高于最高雷达波束(此种情况不符合实际,很少见)3种情况。只有风轮机处于最高雷达波束与最低雷达波束之间时,风轮机才会对雷达产生影响。若将此时相应的雷达仰角数据作为高仰角扫描数据,则会影响风电场杂波抑制效果。
2.2 改进MAP算法流程
改进的MAP算法中,首先根据雷达、风电场位置信息以及雷达参数计算气象雷达的波束范围,并以此为依据来选择气象雷达的高扫数据;其次利用传统MAP算法抑制风电场杂波;最后以低仰角未污染区域的径向速度为先验信息对抑制后的径向速度进行修正,改进的MAP算法流程图如图4所示。

图4 改进MAP算法流程图Fig.4 Improved MAP algorithm flow chart
3 气象雷达风电场杂波抑制效果评价
风电场杂波抑制效果评价从定性与定量两方面进行。定性评价通过人眼直接观察,然而人眼可辨范围有限,定性评价存在一定的局限性。本文采用计算抑制前后受风电场污染区域气象目标相应参量随距离变化图像的熵值和该图像所构成矩阵的奇异值分布两方面结合来评估风电场杂波抑制效果。由于气象目标的反射率因子、径向速度和谱宽等参量随距离均匀分布,因而认为未受风电场污染区域参量随距离变化的图像熵值较小,污染区域相应参量所对应的图像熵值将有所增加。矩阵的奇异值代表图像的能量信息[14],图像矩阵的能量信息主要由该矩阵的大奇异值决定。由此当风电场杂波抑制后所对应图像的大奇异值变小即图像的能量变小,恢复效果较好。一般来说,当熵值与矩阵的奇异值两者都减小,恢复效果较好。
4 实验结果
实验数据来源于美国下一代WSR-88D气象雷达采集的LEVEL II数据,即只利用经过回波数据处理后的二次矩数据来实现风电场杂波抑制。本文研究位于堪萨斯州,Dodge市的KDDC雷达(见图5蓝线圈标注)以及位于该雷达西南40 km左右处的Gray County风电场(见图5红线圈标注)。其中,KDDC雷达位于北纬37.760°,西经99.968°。雷达天线的海拔高度为816 m。Gray County风电场及风轮机参数如表1所示。Gray County风电场是堪萨斯州最大的风电场,也是美国最大的风电场。该站点由170台Vestas V-47风力发电机组成,每个风轮机塔架高217 ft,叶片长77 ft,发电量为470 kW。
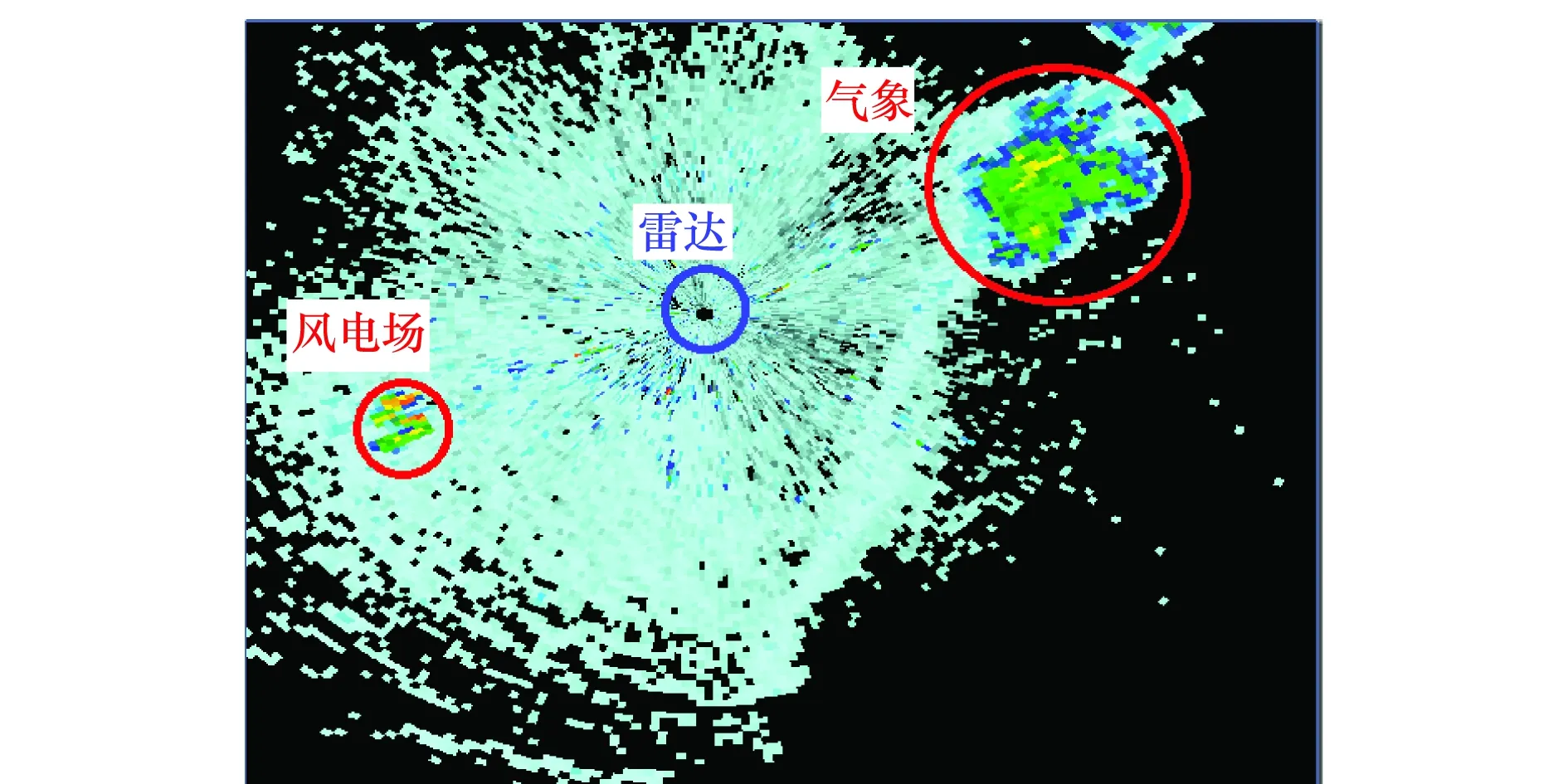
图5 Gray County风电场、KDDC雷达及气象分布关系Fig.5 Distribution relationship of Gray County wind farm, KDDC radar and meteorological target
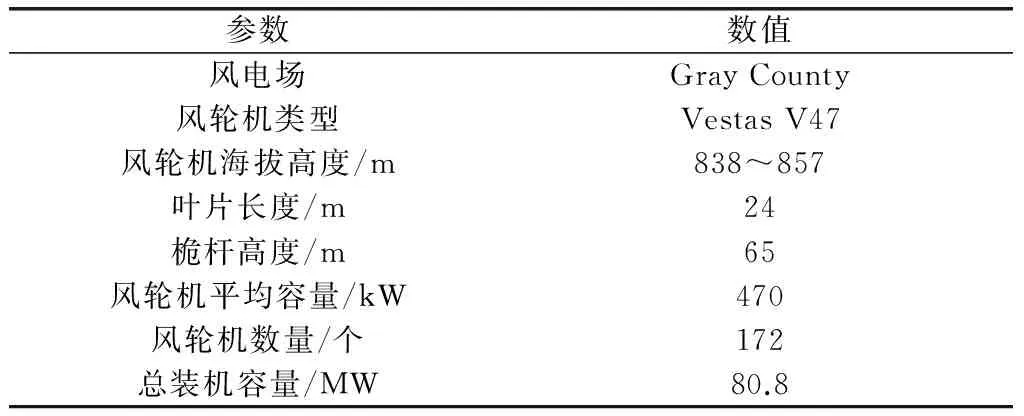
参数数值风电场GrayCounty风轮机类型VestasV47风轮机海拔高度/m838~857叶片长度/m24桅杆高度/m65风轮机平均容量/kW470风轮机数量/个172总装机容量/MW80.8
4.1 传统的MAP抑制算法及抑制效果评价
美国KDDC雷达于2006年3月30日,20:39:48(GMT)时刻扫描捕获的包含风电场在内的某区域雷达回波为数据源验证风电场杂波抑制方法及评估其抑制性能的有效性。利用传统MAP算法进行风电场杂波抑制,结果如图6所示。
图6中,从左向右的3列依次代表反射率因子、径向速度和谱宽3个参量。从上至下分别为风电场杂波抑制前,风电场杂波抑制后以及真实气象目标的参量信息。从图6可以看出,风电场杂波抑制后的参量(反射率因子、径向速度和谱宽)与真实气象信息很接近,抑制效果较好。为定量评价其抑制效果,计算抑制前后反射率因子、径向速度和谱宽3个参量与真实气象(未受污染)相应参量的偏差和方差如表2所示。由表2看出,反射率因子、径向速度、谱宽都有所改善。谱宽抑制效果最好,反射率因子及径向速度抑制效果次之。
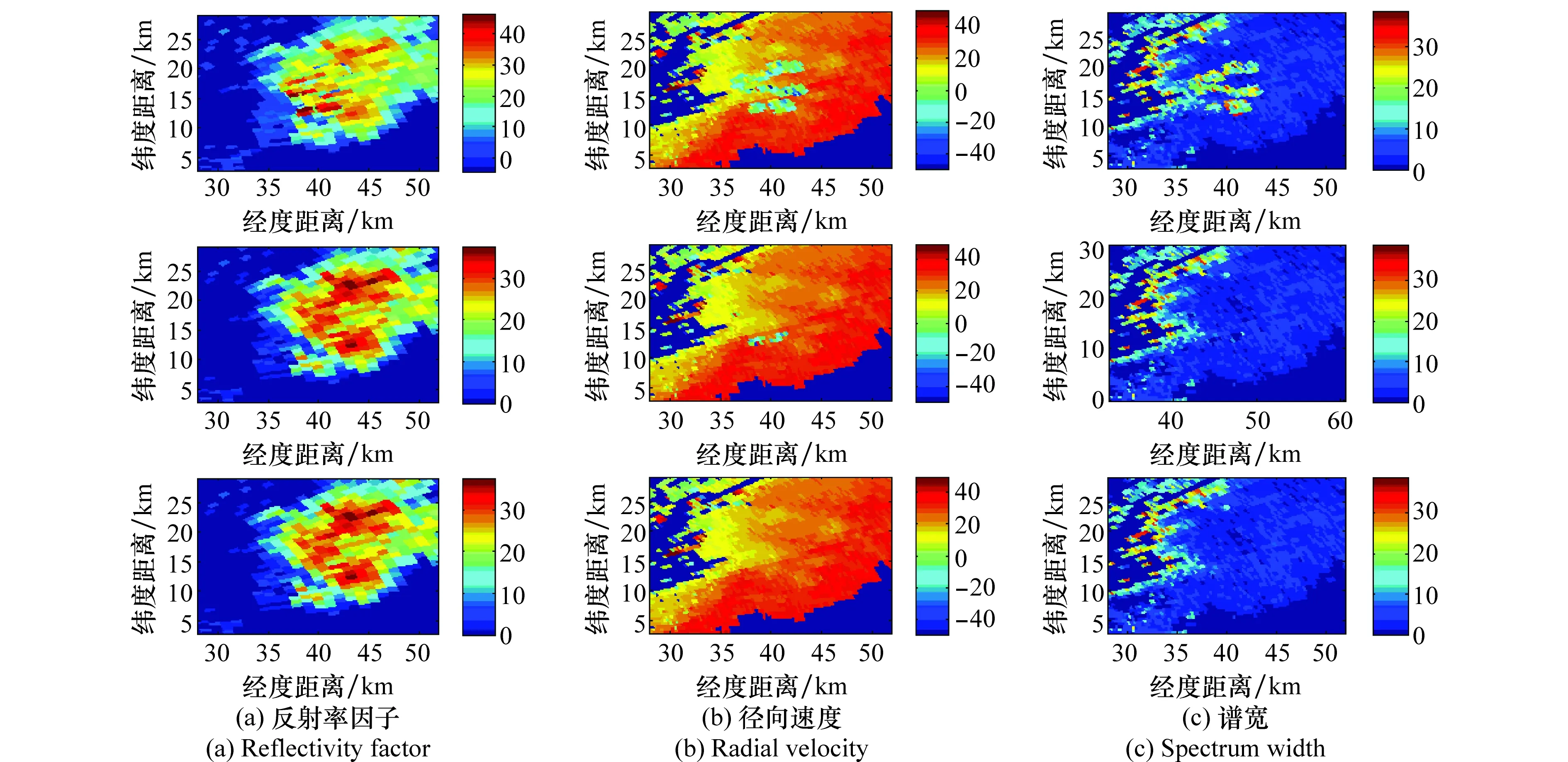
图6 传统MAP算法抑制前后风电场及气象对比Fig.6 Comparison of wind farms and weather between before and after suppression using the traditional MAP algorithm
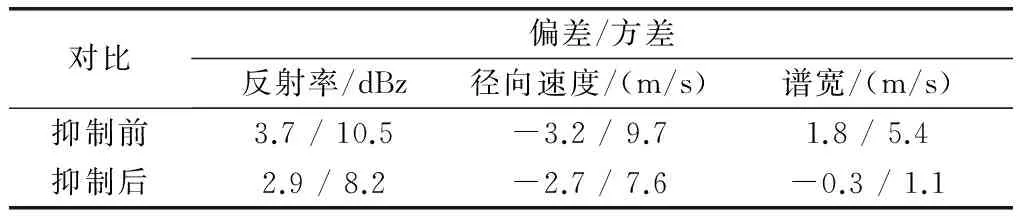
对比偏差/方差反射率/dBz径向速度/(m/s)谱宽/(m/s)抑制前3.7/10.5-3.2/9.71.8/5.4抑制后2.9/8.2-2.7/7.6-0.3/1.1
4.2 不同体扫模式下风电场杂波的抑制与抑制性能分析
数据依旧来源于Gray County风电场对KDDC雷达产生的杂波。降水模式分为层状云降水(扫描模式为VCP21)和对流云降水(扫描模式为VCP212)。对流云降水具有降水强、反射率因子大等特点;层状云降水的回波呈现成片分布特点,面积较大、降水弱、反射率因子较小[15]。由于无法获得风电场区域处真实的气象信息,为此如第3节所述,引入熵值及奇异值分布特性来定量评价杂波抑制效果。
4.2.1 层状云降水模式
层状云降水体扫模式为VCP21,该扫描模式6 min内实现9个不同仰角的扫描:0.57°,1.53°,2.50°,3.35°,4.30°,6.00°,9.90°,14.60°,19.50°。利用气象雷达与风电场的地理信息及相应的雷达参数计算仰角(1.53°和2.50°)所对应的最低雷达波束高度如图7所示。
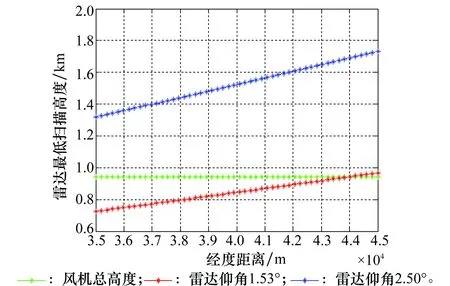
图7 VCP21模式下不同仰角的最低雷达波束高度Fig.7 Minimum radar beam height for different elevations in VCP21 mode
由图7可以看出,VCP21模式下,雷达1.53°仰角的最低波束可以部分照射到风电场杂波,而2.50°仰角照射不到风电场杂波。分别选择1.53°和2.50°两个仰角的扫描作为高扫数据进行风电场杂波抑制,抑制结果如表3及图8所示。由表3及图8可以看出,相比1.53°仰角作为高扫数据,2.50°仰角作为高扫数据得到的杂波抑制效果较好。这是由于层状云降水具有水平范围大、持续时间较长、强度比较均匀、随时间变化缓慢的特点[16]。由于1.53°仰角仍可以照射到风电场杂波,因而在气象目标不够强的前提下,该仰角作为高扫数据会影响风电场杂波抑制效果。
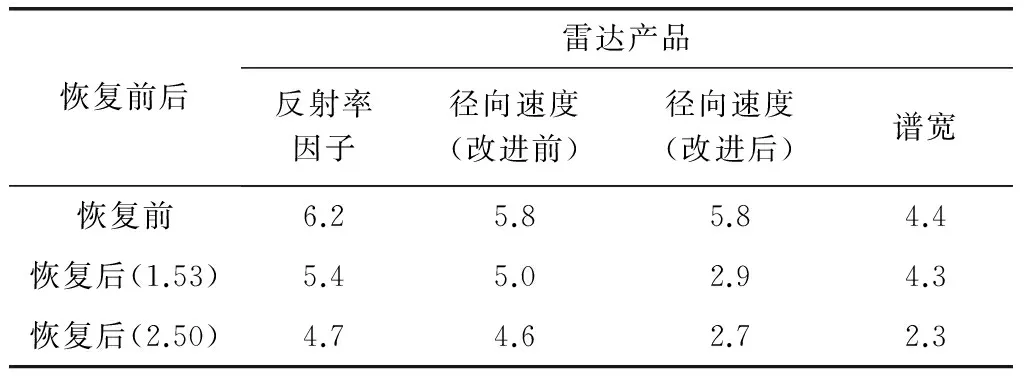
表3 VCP21模式下的抑制性能(熵值)


图8 VCP21模式下改进MAP算法的抑制效果及性能(雷达: KDDC,数据时间:2011年6月29日11:27:50)Fig.8 Suppression effect and performance of improved MAP in VCP21 mode (Radar: KDDC, Data Time: June 29, 2011 11:27:50)
需要说明的是,风电场杂波抑制后反射率因子和谱宽的改善效果较好,而径向速度由于风轮机叶片不停旋转,导致同一扫描时刻上风轮机叶片不同散射点具有或正或负不同的径向速度,且径向速度在不同俯仰角扫描下变化较为明显,为此本文对径向速度的抑制结果进行改进。由于同一低扫区域内气象目标径向速度具有随距离连续分布的特性,对距雷达相同距离单元的非污染区径向速度进行曲线拟合(见图9 (a)),并以此作为先验信息,对MAP处理后的径向速度结果进行平滑校正。校正后的结果如图9(b)所示。对比图8(b)、图9(b)以及表3可以看出,熵值由改进前4.6 bit/pixel降为2.7 bit/pixel,径向速度抑制效果有较大的改善。
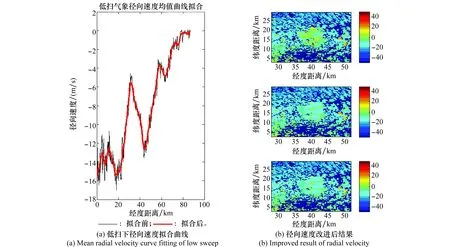
图9 VCP21模式下的径向速度改进后结果Fig.9 Improved results of radial velocity in VCP21 mode
4.2.2 对流云降水模式
对流云降水包括VCP11,12,121,211,212和221这6种体扫模式。本文主要研究VCP212模式。不同仰角下的最低雷达波束高度如图10所示。从图10可以看出,VCP212模式下的0.81°仰角可以照射到风电场杂波,而2.35°仰角照射不到风电场杂波。分别利用0.81°和2.35°仰角作为高扫数据进行风电场杂波抑制,其结果如表4及图11所示,其中图11中的径向速度是经过改进后的结果。
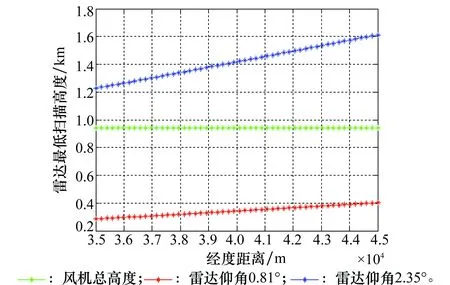
图10 VCP212模式下不同仰角的最低雷达波束高度Fig.10 Minimum radar beam height at different elevations in VCP212 mode

bit/pixel

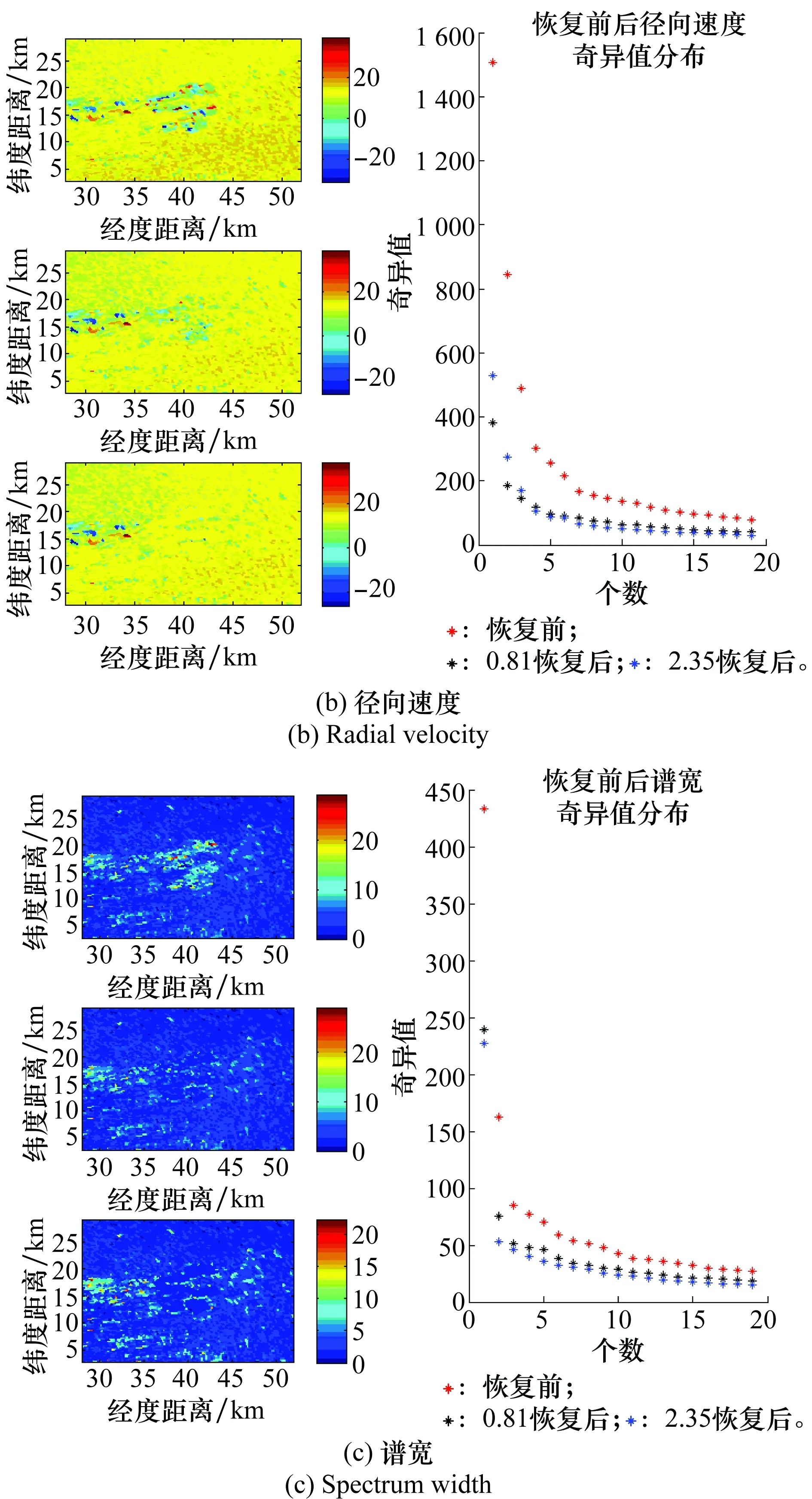
图11 VCP212模式下的改进MAP算法抑制效果及性能(雷达: KDDC,数据时间:2017年12月2日01:56:04) Fig.11 Suppression effect and performance of improved MAP in VCP212 mode(Radar: KDDC, Data Time: December 2, 2017 01:56:04)
由图11及表4看出,2.35°仰角作为高扫数据得到的抑制结果对于反射率因子和径向速度的改善不很明显,这是由于对流云降水具有范围小、强度大、分布不均匀等特点,相比于此时的强气象目标,虽然0.81°仰角仍可以照射到风轮机,但由于气象目标信息较为明显,对杂波抑制效果影响不大。
5 结 论
本文在传统MAP算法的基础上,利用雷达波束范围作为先验信息选择有效的高扫区域数据来实现风电场杂波抑制。同时,针对径向速度抑制效果不够明显的问题,利用低扫未污染区域的径向速度对抑制后的结果进行校正。利用不同体扫模式下KDDC雷达附近的Gray County风电场雷达回波的Level-II实测数据对算法进行验证,并详细分析不同VCP体扫模式下文中抑制算法的性能。从验证结果可以看出,对于信杂比较低的层状云降水模式,改进算法抑制效果提升较为明显。而对于信杂比较高的对流云降水来说,改进算法的抑制效果改善有限。需要说明的是,对于晴空模式,由于大气折射指数分布不均匀影响使其气象参数变化较为明显。因此,晴空模式应选取与污染数据所对应的低仰角较为接近的次低仰角数据作为高扫数据。
参考文献:
[1] Global Wind Energy Council. Global wind statistics 2014[EB/OL].[2015-03-15]. http:∥www.gwec.net/wpcontent/uploads/2015/03/GWEC_Global_Wind_2014_Report_LR.pd.
[2] 中国可再生能源学会风能专业委员会(CWEA). 2014中国风电发展报告[J]. 风能,2015(2):36-49.
China Wind Energy Association (CWEA). 2014 Chinese wind power development report[J]. Wind Energy, 2015(2): 36-49.
[3] GALLARDO H B. Detection and mitigation of wind turbine clutter in C-band meteorological radar[J]. IET Radar, Sonar & Navigation, 2010, 4(4): 520-527.
[4] ISOM B M, PALMER R D, SECREST G S, et al. Detailed observations of wind turbine clutter with scanning weather radars[J]. Journal of Atmospheric and Oceanic Technology, 2009, 26(5): 894-910.
[5] NAQVI A, LING H. Signal filtering technique to remove Doppler clutter caused by wind turbines[J]. Microwave and Optical Technology Letters, 2012, 54(6): 1455-1460.
[6] YANG J, PAN C, WANG C J, et al. Wind turbine clutter mitigation in coastal UHF radar[J]. The Scientific World Journal, 2014(2014):529230.
[7] KONG F, ZHANG Y, PALMER R. Wind turbine clutter mitigation for weather radar by adaptive spectrum processing[C]∥Proc.of the Radar Conference, 2012:471-474.
[8] FENG N, TORRES S, PALMER R. On the mitigation of wind turbine clutter for weather radars using range-Doppler spectral processing[J]. IET Radar, Sonar & Navigation, 2013, 7(2): 178-190.
[9] KONG F, ZHANG Y, PALMER R, et al. Wind turbine clutter mitigation for weather radar by means of telemetry[C]∥Proc.of the 34th Conference on Radar Meteorology, 2009.
[10] KONG F,ZHANG Y, PALMER R, et al. Wind turbine clutter mitigation for weather radar: a feasibility study by means of scaled measurement[C]∥Proc.of the 27th Conference on Interactive Information Processing Systems, 2011.
[11] FRANK U, BRADLEY M I. Mitigation of wind turbine clutter for weather radar by signal separation[J]. IEEE Trans.on Geoscience and Remote Sensing, 2016, 54(5):2925-2934.
[12] KONG F. Wind turbine clutter in weather radar: characterization and mitigation[D]. USA:University of Oklahoma,2014.
[13] 汲超迪.气象雷达风电场杂波电磁散射特性分析及其影响评估技术研究[D].天津:中国民航大学, 2016.
JI C D. Analysis of clutter electromagnetic scattering characteristics of weather radar wind farms and Its impact assessment technology[D].Tianjin: China Civil Aviation University, 2016.
[14] 高仕龙. 矩阵奇异值分解的图像性质及其应用[J].乐山师范学院学报,2008,23(5):14-15.
GAO S L. The image properties of matrix singular value decomposition and its application[J]. Journal of Leshan Teachers College,2008,23(5):14-15.
[15] 仲凌志.层状云和对流云雷达回波的自动识别及其在估测降水中的应用[D].南京:南京信息工程大学,2006.
ZHONG L Z. Automatic recognition of layered cloud and convective cloud radar echo and its application in estimating precipitation[D].Nanjing:Nanjing University of Information Engineering, 2006.
[16] 胡明宝.天气雷达探测与应用[M].2版.北京:气象出版社,2007:147-151.
HU M B.Weather radar detection and application[M].2nd ed. Beijing: Meteorological Press, 2007: 147-151.
