羽流导流综合验证试验技术
2018-04-26胡旭坤张登攀张奎好
胡旭坤,张登攀,张奎好
(北京航天试验技术研究所,北京 100074)
0 引言
航天器的姿态控制和轨道调整依靠姿轨控发动机来实现,姿轨控发动机排气羽流冲击在航天器表面,会对航天器产生作用力,对其姿态保持形成干扰力矩。羽流还会在航天器表面造成化学沉积,对元件表面造成侵蚀,会引起光学仪器、太阳能帆板等元件的性能下降,甚至失效。另外,羽流流场高温气体会影响航天器的整体热平衡,同时对一些红外敏感器造成工作干扰。随着我国航天事业的发展,羽流问题越来越受到重视。
羽流试验是研究真空羽流及其效应的有效手段,一般具有以下特点:
1)试验舱具有足够大的空间。为使排气羽流如同在宇宙空间那样自由膨胀,以正确测定羽流的形状和特征,要求试验舱的膨胀舱部分的尺寸足够大。
2)以大抽速的内装式深冷泵做主抽气泵。只有泵的抽速足够大,才能保证当发动机工作时,试验环境的真空度满足复现羽流在宇宙空间的自由膨胀状况。
3)配备复杂的羽流测量系统。羽流试验需要测量羽流流场、气动力效应、气动热效应和污染效应等参数,与一般的高空模拟试验相比,其测量参数的种类和难度大大增加。
某航天器将在地外天体起飞、上升,由于上升发动机燃气排放空间有限,使航天器所承受的发动机羽流力、热效应将更加明显,且羽流场也更加复杂,对于航天器的起飞稳定性及热防护造成直接威胁。为了验证发动机羽流对航天器的综合力、热效应,验证发动机与羽流导流装置的相容性,考核羽流热防护材料性能及防护效果,需要进行发动机燃气羽流导流综合验证试验工作。本次试验发动机推力大大超出了我国现有羽流试验设施能力,试验难度大,任务周期紧,为此研究制定了对现有大型高空模拟试验台进行改造,以承担羽流导流综合验证试验的方案。
1 试验系统组成及原理
羽流导流综合验证试验系统包括真空舱、试验件结构安装系统、位姿调整系统、温度控制系统、真空抽气系统、控制系统、推进剂加注系统及测量系统等,原理框图如图1所示。
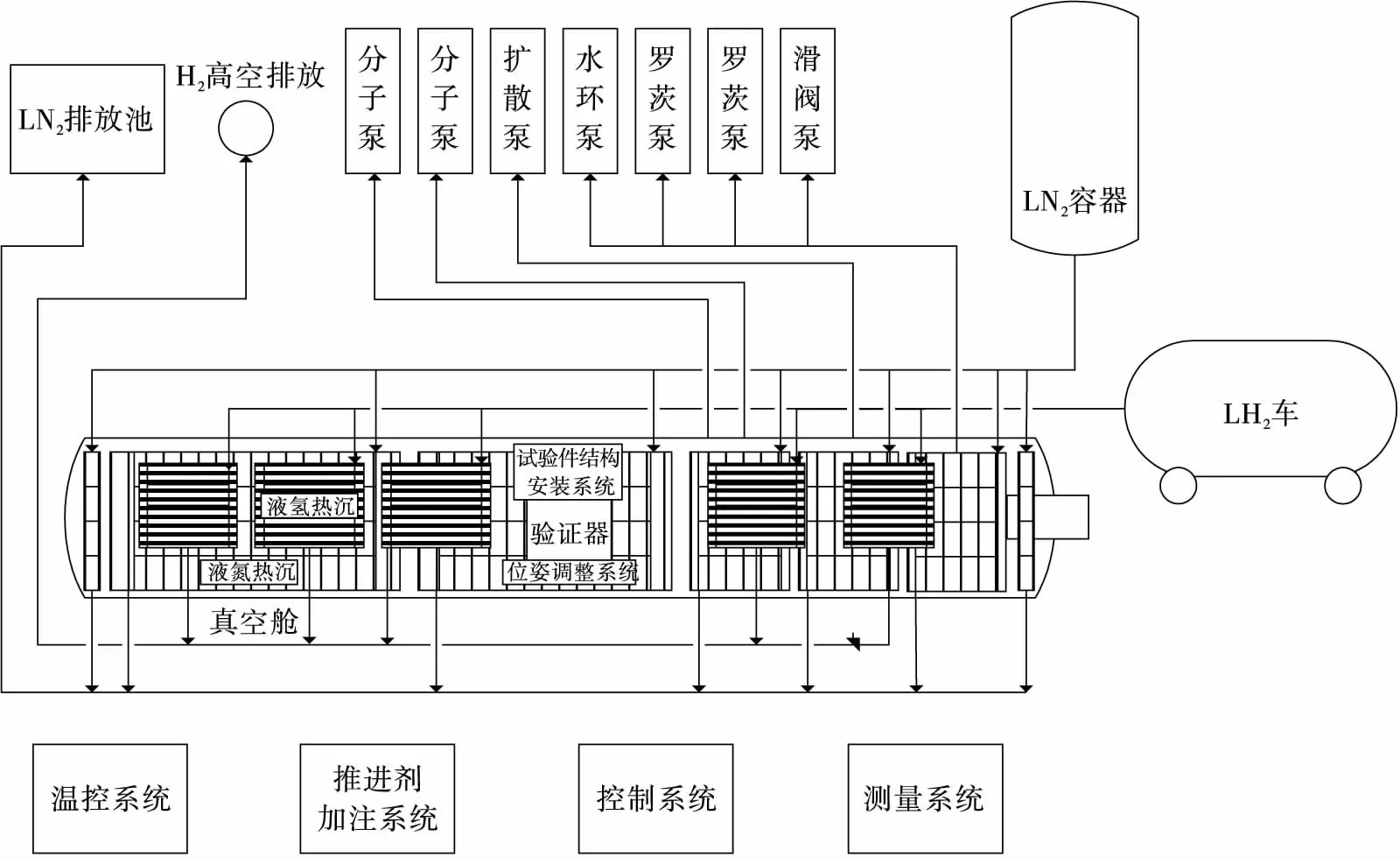
图1 羽流导流综合验证试验系统框图Fig.1 Block diagram for synthetical verification test system of plume flow guidance
1.1 真空舱
该设备为一个卧式真空容器,用于真空环境的获得及试验件的安装,以满足点火过程中试验件环境压力要求。真空舱直筒部分直径5 m、长15 m、容积500 m3。舱内设有液氮热沉支撑、试验件安装及位姿调整系统支撑。舱上设置液氮进出舱口、液氢进出舱口、电缆进出舱口、抽空口、放气口、观察窗、检查门及紧急泄压口等法兰接口。
1.2 试验件结构安装系统
该系统用于试验验证器、测量装置的安装以及结构的整体移动,同时实现主推力及羽流扰动作用力的测量,包括试验件支架和测力板,具备各向力矩现场校验功能。
1.3 位姿调整系统
该系统用于调整试验验证器的位置,从而实现航天器起飞、上升过程模拟。采用六自由度平台作为调姿运动平台,由上平台、下平台、六套作动器和控制系统等组成。利用上位机控制伺服电机的运动,实现试验件按照试验要求的状态运动。
1.4 温控系统
该系统用于使试验件及测控设备在试验过程中保持正常工作温度,采用电加热丝带缠绕加热温控方式对部件局部控温,对异型工件采用贴片进行局部控温。
1.5 真空抽气系统
该系统用于实现发动机点火前的极限真空要求以及点火过程中的动态真空要求。采用机械真空泵与低温泵组合工作的方式,包括液氢热沉、液氢供应系统、液氮热沉、液氮供应系统、水环泵机组、滑阀泵机组、罗茨泵机组、分子泵机组、氢浓度检测及报警系统。
1.6 控制系统
该系统用于完成羽流导流试验中验证器推进分系统阀门的单元控制及程序控制,并具备各路阀电流的数据采集能力。控制系统由控制台、控制机柜、欧姆龙PLC、上位机、通讯电缆、远程控制电缆、过舱转接插头、舱内对接插头、UPS不间断电源、直流稳压电源、隔离放大模块及信号隔离分配模块等部分组成。
1.7 推进剂加注系统
该系统用于向试验验证器加推进剂,包括氧化剂、燃料加注系统各一套,分别由加注贮罐、放液回收罐、真空泵、称重设备、配气设备、废气处理设备、流量计、压力表、管路、过滤器及阀门等组成。
1.8 测量系统
该系统用于发动机羽流场参数、环境及试验件状态参数的测量,由稳态数据采集系统、压力前端测量系统、真空压力前端测量系统、温度前端测量系统、热流前端测量系统、舱内摄录像系统和纹影仪组成。
试验中试验验证器安装于真空舱内,可远程控制上升发动机开关机及位姿调整装置的运动。
试验过程中为降低实时抽真空对发动机羽流场的影响,采取发动机点火前利用机械真空泵机组与液氮热沉、液氢热沉联合对真空舱抽真空,待真空舱内压力满足点火条件后,关闭机械真空泵机组,然后再开始发动机点火的模式。在点火过程中,低温热沉系统一直处于运行状态,对发动机燃气进行冷凝吸附,以维持真空舱内环境压力。
试验点火模式有两种:一种是静态点火,即调整试验验证器的位姿至一定的距离和姿态角,然后发动机点火;另外一种是动态点火,即发动机点火的同时,采用位姿调整系统控制试验验证器模拟起飞过程运动特性。在整个发动机点火程中,通过部署在相应位置的热流传感器、压力传感器、热电偶、力矩测量装置及纹影相机等测量羽流场的力、热特性并记录羽流场的分布情况。
2 试验结果
羽流导流综合验证试验系统建成并通过调试后,成功完成了20次试验点火任务。
2.1 真空舱内压力
真空舱内压力曲线如图2所示。各次发动机点火真空舱初始环境压力均低于1×10-2Pa,发动机点火0.5 s时刻舱压低于20 Pa,热沉对于燃气的吸附速率达到1.18×106Pa·m3/s,全面满足了总体部门提出的试验过程中真空舱环境压力要求。
2.2 试验件结构安装系统
通过试验获得了在导流装置处于不同距离与角度下,试验验证器所受各向力与力矩数据。发动机推力曲线如图3所示,试验件结构安装系统在发动机点火前后系统的零位一致,点火过程中,推力参数测量性能稳定,各次点火的曲线变化规律完全一致,能够真实反应发动机点火产生的推力。发动机点火产生的轴向推力除跟随工况的变化略有升高或降低外,推力变化趋势一致。
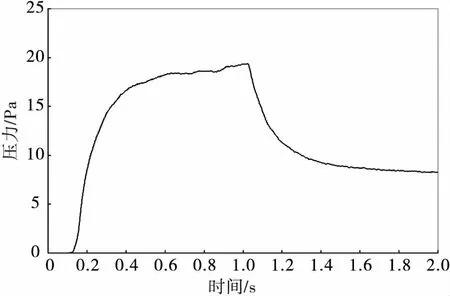
图2 真空舱内压力曲线Fig.2 Curve of pressure in vacuum chamber
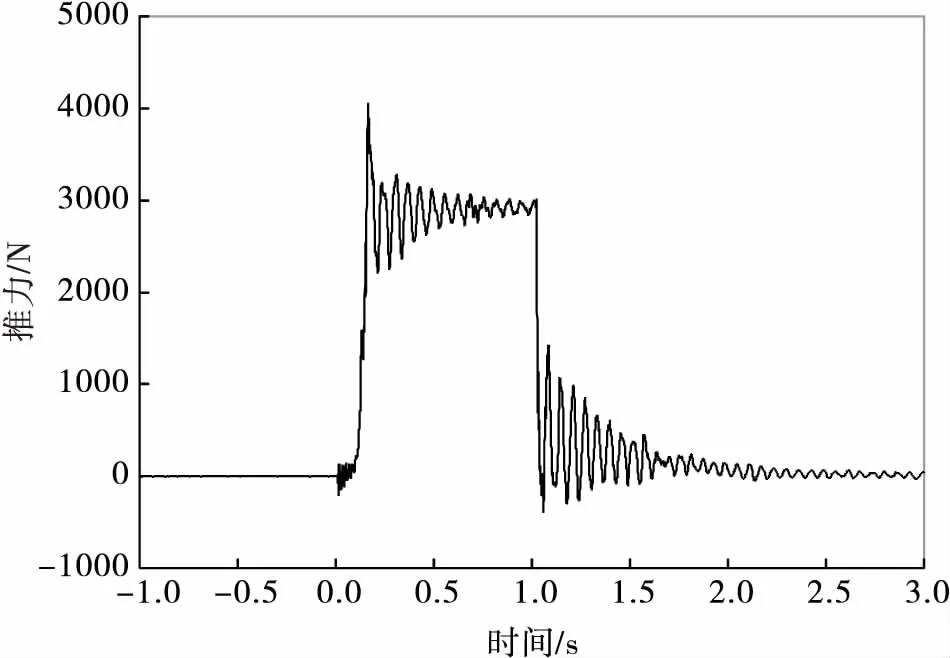
图3 发动机推力曲线Fig.3 Curve of engine thrust
2.3 位姿调整系统
各次静态位姿调整点火试验,系统反馈值与参数设定值最大位移偏差为0.719 mm,角度最大偏差为0.048°,满足位移控制精度优于1 mm,角度控制精度优于0.1°的要求。
动态位姿调整试验,位置时间曲线如图4所示,位置反馈值(X′)与参数设定值(X)一致。
2.4 温控系统
各次试验温控系统所控制温度稳定于设定目标温度上下2 ℃范围内,保证了舱内各测控设备在低温环境下正常运行。
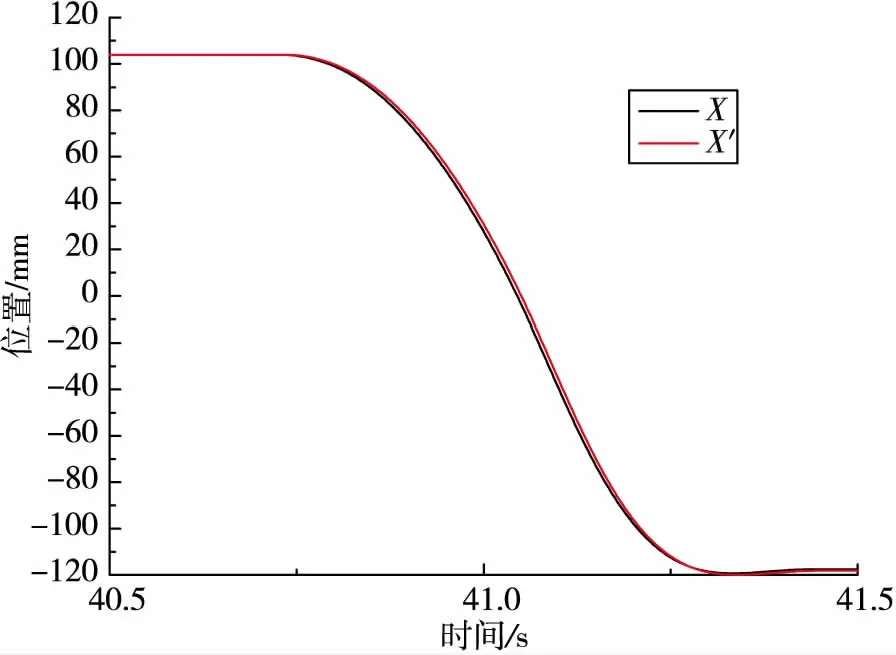
图4 位置时间曲线Fig.4 Curve of position time
2.5 测量系统
测量系统获得了试验验证器表面压力分布数据、热流密度分布数据、温度分布数据、氧/燃喷前压力数据、发动机室压数据,记录了发动机点火及羽流扩散视频图像,发动机燃气流纹影图像。测量系统在各阶段试验中工作正常,测量参数重复性好,数据真实有效,为评价发动机羽流对航天器的综合力、热效应提供了依据。
3 采用的关键技术
3.1 真空环境的获得及保持
本次试验要求在发动机点火前真空舱内压力不超过1×10-2Pa,发动机点火0.5 s内真空舱内压力低于20 Pa,发动机燃气流量大,舱内动态真空度要求高。为达到试验要求,首先增加液氮热沉面积并新增液氢热沉系统,采用低温冷凝吸附的方法吸附点火过程中发动机排出的燃气,提高系统极限真空度,燃烧产物中的水蒸气、二氧化碳、一氧化碳以及氮气迅速吸附在热沉表面。其次扩大真空舱的容积,新增一个真空舱段,使真空舱总容积达到500 m3,从而能够在保持低压情况下容纳不可冷凝的氢气组分。
本次试验发动机共点火20次,由于发动机燃气中含有氢气成分,液氢热沉无法冷凝吸附,使得真空舱内压力在发动机点火后达到1×10-2Pa以上,需将舱内热沉复温,将舱内氢气置换,然后重新对真空舱抽真空,一次点火需要2~3天时间。为加快试验进度,在真空舱上增设了分子泵抽真空系统,使得发动机一次点火后不必开舱复温,利用分子泵抽真空系统,经2.5 h,即可使真空舱内达到低于1×10-2Pa的点火条件,大大缩短了试验周期,节约了试验介质。
以上措施有效保证了试验所需真空环境条件,在国内首次将液氢热沉应用于发动机点火的高空模拟试验中。
3.2 羽流扰动作用力的测量
羽流扰动作用力是本次试验的主要测量参数,由于验证器重力全部加载在测力装置上,羽流扰动作用力远远小于试验验证器重力,因此难以准确测量。在国内仅进行过单台发动机的推力矢量测量,还没有进行过舱天器整机偏转力矩测量。为满足测量精度要求,采取了以下措施:
1)将4个三向压电石英力传感器均布在试验件的安装平面上,构成4点支撑式压电测力仪,具备6分力测量能力。利用4个三向力传感器输出的12路力信号可求解得出推力矢量力的大小、方向以及作用位置的数据。
2)选用具有较大预紧力的压电晶体测力结构,克服试验件及辅助部件自重造成预紧力损失问题。
3)配置轴向力校验装置和侧向力校验装置,对3个方向的测力传感器进行现场静态标定,保证推力及力矩测量的准确性。
所研制的测量系统结构紧凑、刚性好、固有频率高,全面满足了羽流扰动作用力测量精度要求。
3.3 真空低温环境下试验验证器运动模拟
羽流导流综合验证试验过程中,为了获得试验验证器在一定距离(0.2~0.6 m)、角度(0~6°)范围内不同位置条件下的发动机羽流场力、热效应,需要在不同相对位置条件下点火。为此研制了基于六自由度Stewart平台模式的位姿调整系统,将试验验证器安装在位姿调整系统上,利用伺服控制系统来控制伺服作动器的六自由度运动,按照试验要求调整试验验证器位置,从而模拟航天器起飞、上升的动态过程。位姿调整系统配置了温控装置,采取了有效的绝缘措施,经调试与试验验证,在试验舱内真空低温环境下工作稳定可靠。
3.4 液氢和氢气的安全使用
液氢热沉安装在真空舱内,用于冷凝吸附发动机燃气,为保障液氢热沉工作,配套了液氢供应系统。液氢具有低温危险性,极易泄漏和汽化为氢气。氢气的可燃极限范围宽,点火能量低,具有爆燃和爆轰危险性。液氢热沉和液氢供应系统设计、运行中采取了以下安全措施:
1)真空舱内液氢热沉管路全部采用焊接形式连接,避免接头处泄漏氢气;
2)试验大厅电气防爆等级提升,增加通风措施,防止氢气聚集;
3)将试验大厅与其他房间连通的预留电缆、推进剂液气路、抽真空管路、扩压器出试验大厅洞口封堵,防止氢气扩散至其他房间;
4)试验大厅内真空舱两侧地面铺设导电橡胶,入口设消静电接地球;
5)对试验现场氢浓度进行检测,超限报警,及时发现险情,加以排除;
6)真空舱设吹氮气系统和水环泵抽真空系统,当检测到舱内氢气大量泄露时,采用向舱内和水环泵出口管路吹氮气和利用水环泵对真空舱抽真空的方式将舱内氢气抽出,露天高空排放。
以上措施确保了各次调试及试验过程操作人员及试验设备的安全。
4 结束语
在现有大型高空模拟试验台基础上通过新增试验件结构安装系统、位姿调整系统、温度控制系统,改造现有真空舱系统、真空抽气系统、控制系统、推进剂加注系统及测量系统等,解决了真空环境的获得及保持、羽流扰动作用力的测量、真空低温环境下试验件的相对运动模拟、液氢和氢气的安全使用等技术难题,建成了羽流导流综合验证试验系统,为我国首个推进系统整机高空模拟试验系统。经调试及试验验证,试验系统全面满足了总体部门提出的各项要求,通过试验获得了试验验证器所受羽流扰动力数据以及试验验证器表面压力、温度、热流密度等参数分布情况数据,圆满完成羽流导流综合验证试验任务。
参考文献:
[1] 郭霄峰, 李耀华, 于广经, 等. 液体火箭发动机试验[M]. 北京:宇航出版社, 1990.
[2]蔡国飙. 真空羽流效应实验系统设计[M]. 北京:国防工业出版社, 2016.
[3] 王文龙,周建平,蔡国飙. 羽流效应地面模拟试验系统关键技术发展[J]. 航空动力学报, 2012, 27(4): 900-906.
[4] 凌桂龙, 王文龙, 蔡国飙,等. 用于发动机羽流试验研究的液氦热沉设计[J]. 航空动力学报, 2011, 26(11): 2630-2635.
[5]张建华, 贺碧蛟, 蔡国飘, 等. 高空羽流撞击效应试验研究[J]. 航天器环境工程, 2005, 22(2): 86-91.
[6] 王文龙, 周建平, 蔡国飙. 姿控发动机羽流气动力测量试验方案初探[J]. 载人航天, 2011(6): 51-56.
[7]肖泽娟, 程惠尔, 周红玲, 等. 空间羽流试验台设计与系统测试[J]. 上海航天, 2008(4):56-60.
[8]肖泽娟, 程惠尔, 周伟敏, 等. 空间发动机羽流场的试验研究[J]. 空气动力学学报, 2008, 26(4): 480-485.
[9]肖泽娟, 程惠尔, 周红玲, 等. 空间CO2羽流压力场的数值计算和实验研究[J]. 宇航学报, 2008, 29(1): 265-269.
[10] CRIDER D H, PREBOLA J L, Jr, CREWS D S. Space environment simulation capabilities and developments at AEDC: AIAA 2005-7635 [R]. USA: AIAA, 2005.
