基于VCS的固存坏块仿真系统设计与应用
2018-04-25,,,,
,, , ,
(上海航天电子技术研究所,上海 201109)
0 引言
NAND Flash[1]固存由于其具有的优点广泛应用于航天数据处理系统,这些优点包括访问速度快、低功耗、高密度、大容量、抗震性强等[2]。由于NAND Flash的制造工艺不能保证其存储区域在生命周期内保持性能的可靠,因此在NAND Flash 生产及使用过程中都有可能产生坏块[3]。在数据处理系统中使用固存控制FPGA对坏块进行管理,为保证坏块管理的正确性,必须对固存控制FPGA进行严格验证。随着坏块管理设计复杂性越来越高,对坏块的验证难度也随之变得日益复杂。传统上,一个完整的设计,往往需要花费70%的时间在验证上,即便如此,也很难保证坏块管理的完全正确性[4]。传统的对固存控制FPGA坏块管理的验证方法有模块级仿真和硬件联测。前者单独测试固存的擦写、读、全擦除等流程,无法模拟固存工作过程中坏块的产生及其对固存控制过程的影响,难以保证验证的充分性。后者在硬件上宏观上测试系统功能,被动地等待固存坏块产生,难以主动控制固存坏块产生位置,且测试周期长,无法保证坏块在不同分布工况下的功能正确性。为此有必要设计一种坏块受控的仿真系统来保证坏块验证的充分性,并提高坏块验证效率。
1 仿真系统搭建
选用VCS作为搭建坏块仿真环境的平台。VCS是Synopsys公司提供的FPGA/ASIC仿真验证平台,支持VHDL、Verilog、SystemVerilog等语言[5]。
1.1 VCS环境准备
编写执行脚本Makefile文件对仿真模型和固存控制FPGA进行分析、编译、仿真。观察结果输出,检查坏块管理的正确性。在Makefile中对VCS做仿真设置,VCS工作过程分为:分析(Analysis)、编译(Elaboration)、仿真(Simulation)[6]。
分析(Analysis)是VCS仿真的第一阶段。该阶段对库文件、固存控制FPGA、仿真模型进行分析、进行语法检查。编译(Elaboration)是VCS仿真的第二阶段。该阶段VCS使用在分析(Aanlysis)阶段产生的中间文件,建立例化层次并生成可执行的二进制文件。仿真(Simulation)是VCS仿真第三阶段。该阶段可通过命令./{OUTPUT}-gui-cm {CM_COMMAND}-cm_dir {OUTPUT}打开仿真界面,观察仿真波形[7]。
1.2 仿真系统结构
在VCS平台中通过Verilog语言建立仿真模型,如图1所示。仿真模型情况如表1所示。核心仿真模型是EEPROM模型和固存模型。前者用于验证坏块表的维护,并将维护过程记录在数据文件中(eeprom0.dat~eeprom3.dat),后者用于模拟固存的全擦除、擦写、读流程,并在上述工作流程中模拟产生坏块并反馈给固存控制FPGA,将固存响应过程记录在固存响应过程文件文件中(flashctrl.dat)。 遥控指令发送模型用于发送读、写、停等遥控指令,其中指令保存在文件remote_control.txt中。
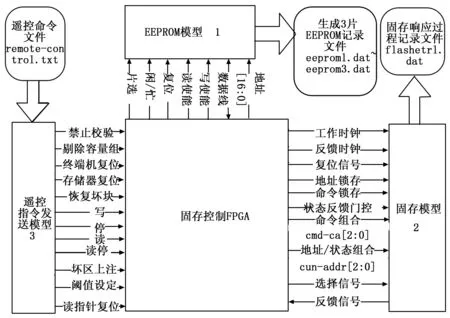
图1 仿真系统结构
仿真模型详情如表1所示,对EEPROM模型和固存模型做详细阐述。
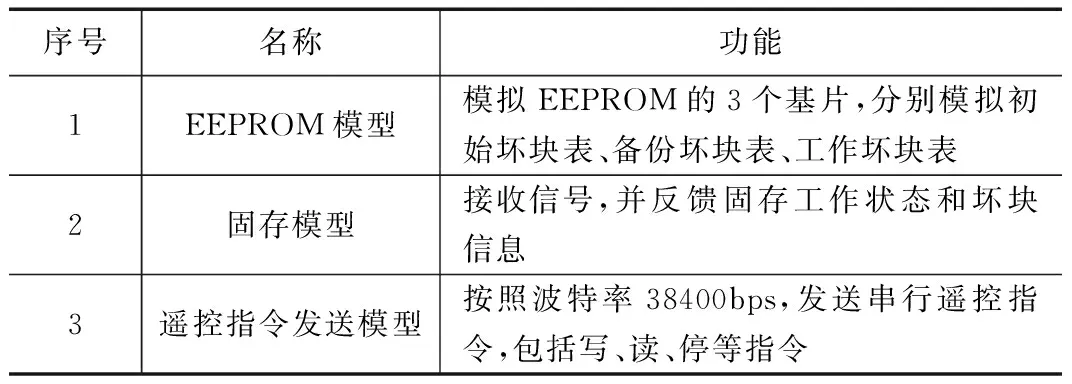
表1 仿真模型表
1.2.1 EEPROM模型
EEPROM模块包括3片EEPROM,其中EEPROM1为初始坏块表,EEPROM2为备份坏块表,EEPROM3为工作坏块表。其中,工作坏块表是固存工作时的日常用表,初始坏块表和备份坏块表是工作坏块表出现异常时,作为备用的应急表。三种表的作用将在其维护过程的验证中做详细说明。
建立工作坏块表包括初始化流程和受固存FPGA控制的读/写流程。初始化流程的意义是建立初始坏块表,读写流程的意义是在存储板工作流程中,根据坏块变化情况维护EEPROM中的工作坏块表。EEPROM地址范围为0 ~ 131071,其存储的数据位宽为8bit,每个EEPROM地址对应固存中的一个块地址。每个EEPROM地址中的数据位宽为8bit,判断坏块的阈值为5,即EEPROM地址中“1”的个数小于5,则认为该EEPROM地址对应的固存块为坏块。通过Verilog语言可以随机产生坏块也可精确产生坏块。EEPROM的地址范围为0~131071,对应固存中131072个块。对工作坏块表的维护过程存储在记录文件eeprom3.dat中。建立工作坏块表流程如图2所示。
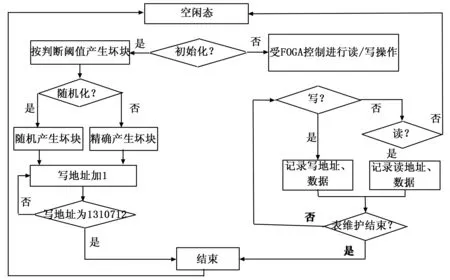
图2 建立工作坏块表流程
1.2.2 固存模型
使用Verilog语言建立固存模型,在模型参数端口可精确设置坏块发生的位置(设置固存的块地址、层地址、页地址)。由固存芯片资料可知,擦写流程中产生坏块的方式与读流程中产生坏块的方式不同。故在固存模型中设置三种模式的坏块反馈机制:第一,擦写固存时坏块判断标准:查询6次未收到准备好信息,或收到准备好信息但存储板反馈为坏块时,则认为出现坏块[8-9]。第二,读固存初始坏块表坏块判断标准:查询1次收到读出厂标志为低电平(坏块),则认为出现坏块。第三,读固存时坏块判断标准:读操作时当读完一个区块数据后,对收到的汉明校验计数结果进行判断,若汉明校验信号低电平脉冲个数大于遥控指令设定的阈值,则认为该区块为坏块。其中第一、第三种情况出现在固存工作过程中,是固存自发行为。第二种情况受遥控指令控制,当遥控指令发送模型发送“读初始坏块表指令”后,固存读EEPROM第1层中存储的初始坏块信息。固存坏块产生机制如图3所示。
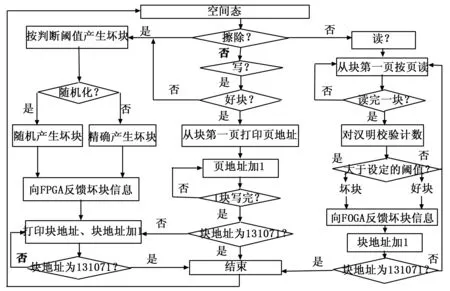
图3 固存工作流程中坏块产生流程图
2 坏块管理验证
对固存坏块管理的验证包括坏块表维护过程的验证和坏块分布对固存读写流程影响的验证。
2.1 坏块表维护过程验证
仿真系统对固存坏块表维护过程的验证包括建立初始坏块表、恢复初始坏块表、恢复备份坏块表、建立备份坏块表、坏块取消、坏块上注、工作坏块表下传、写固存时坏块查询及标记、读固存时坏块查询及标记、擦除固存时坏块查询及标记。
1)建立初始坏块表:仿真系统发送“读初始坏块表指令(32’h000018C8)”。仿真系统根据固存模型反馈,将固存中的初始坏块情况写入记录文件eeprom1.dat。Data为8bit数据,若数据的二进制形式含“1”的个数小于5,则是坏块,若“1”的个数大于等于5,则是好块。固存好块地址在eeprom1.dat中记录情况(部分)如下所示:
top_tb.MU5: Addr = 000b,Data = 7f; top_tb.MU5: Addr = 001c,Data = df;
top_tb.MU5: Addr = 001f,Data = 7f; top_tb.MU5: Addr = 0024,Data = fd;
2)恢复初始坏块表:仿真系统发送“恢复初始坏块表指令(32’h000018C7)” 。FPGA将初始坏块表eeprom1.dat的数据写入工作坏块表eeprom3.dat。导入数据时进行阈值为5的判断,即若数据“1”的个数小于5,认为是坏块,若数据“1”的个数大于5,认为是好块。将好块写为全1,将坏块写为全0。eeprom3.dat记录了恢复初始坏块表的全部过程。固存共131072个块,仿真系统将整个恢复坏块表流程记录,发现初始坏块表最后一个数据无法写入工作表。
经分析原因如下:在读初始坏块表最后一个地址时,在状态机state_prom的状态PROM_RDPROM_FIRST_OELOW态将wrprom_nxt_end置为高电平,导致写工作坏块表最后一个地址时片选信号无效,无法完成对工作表最后一个地址的写入。针对该问题的修改措施为:将对初始坏块表判最后一个地址的位置由状态PROM_RDPROM_FIRST_OELOW移状态PROM_WRPROM_NXT_END,使得判到初始坏块表最后一个地址时,对工作表的片选信号有效,从而完成对最后一个地址的写入。
3)恢复备份坏块表:仿真系统发送“恢复备份坏块表指令(32’h000018C6)”。仿真系统将备份坏块表中的信息写入工作坏块表,即通过读eeprom2.dat写eeprom3.dat记录了恢复备份坏块表过程。由于备份表关于地址的控制逻辑与初始表关于地址的逻辑相同,故备份表最后一个地址(131071)也无法被选中,及备份坏块表的最后一个地址信息复发恢复到工作坏块表。修改措施与恢复初始坏块表的修改方法相同。
4)建立备份坏块表:仿真系统发送“建立备份坏块表指令(32’h000018C5)”。仿真系统将工作坏块表信息写入备份坏块表,即读eeprom3.dat写eeprom2.dat。仿真系统同样发现工作坏块表最后一个地址无法写入备份坏块表。修改措施与恢复初始坏块表的修改方法相同。
5)坏块上注:当固存数据传输异常,地面控制站认为固存某地址是坏块时,需要进行坏块上注,在工作坏块表中将固存的坏块信息进行标注。仿真系统发送“坏块上注指令32’hbf000005”,即向固存地址05h上注信息,将其标记为坏块。观察eeprom3.dat,可见仿真系统对指定的坏块进行了上注。
6)坏块取消:当地面控制站认为固存某地址是好块时,需要进行坏块取消。其工作流程类似于坏块上注。仿真系统发送“坏块取消指令32’hb5000013”,即向固存地址13h上注信息,将其标记为好块。观察eeprom3.dat,地址13 h由坏块(00h)转变为好块(ffh)。
7)工作坏块表下传:仿真系统发送“坏块表下传指令”,工作坏块表信息会通过遥测下传。
8)写固存时坏块查询及标记:仿真系统发送“写指令”。仿真系统可根据工作坏块表对固存坏块标记情况跳过对应的坏块,只写好块。通过查看仿真系统产生的eeprom3.dat中坏块分布信息及flashctrl.dat中固存写过程,可以验证FPGA跳过了坏块,只写好块。
9)读固存时坏块查询及标记:在仿真系统中令汉明校验开启,令固存模型在读流程中产生坏块,固存坏块信息保存在文件flashctrl.dat中,工作坏块表对固存读流程中坏块变化情况保存在文件eeprom3.dat中。通过比较flashctrl.dat与eeprom3.dat可以验证在读流程中坏块产生及标记的正确性。
10)擦除固存时坏块查询及标记:令仿真系统模拟固存在擦除过程中不产生坏块,固存操作记录flashctrl.dat中只对工作坏块表eeprom3.dat中的好块进行擦除;令固存在擦除过程中产生坏块,eeprom3.dat根据固存坏块变化情况实时进行变化。
2.2 坏块分布对固存读停的影响
2.2.1 读停问题描述
固存控制FPGA要求读固存页地址到达300 h时,可自动读停。若不能读停而对相同地址重复读,会造成数据重复、紊乱。令仿真系统中工作坏块表第0块、第4095块为好块,其余块为坏块(块地址12d也为坏块),观察固存能否在页地址300 h时自动读停。工作坏块表设置方式如下所示:
initial begin
k = 0;
sram_cnt = 0;
repeat(131072) begin
sram[sram_cnt] = 8’h00; //备注:00h表示坏块
sram_cnt = sram_cnt + 1;
end
for (k = 0;k < 4096; k = k + 1)begin
sram[0] = 8’hff; //备注:将第0块,第4095块设置为好块,其余均为坏块
sram[4095] = 8’hff; //备注:ffh表示好块
end
end
固存控制FPGA在页地址为300h(768d),即块地址为768/64=12d(1块包含64页)时配合页读使能信号rd_page_adden对信号cntt进行计数,当cntt计到“10”时,令固存读停,源代码下所示。
process(rst_n,clk)
… …
if(zs_rd_addreq='1')then
cntt <=(others=>'0');
elsif (rd_page_adden = '1')and(rd_addr(width downto 0)="000" & x"0300")then
cntt <=cntt+1;
……
end process;
process(rst_n,clk)
begin
… …
elsif (cntt ="10")then
rd_stop <='1';
else
rd_stop <='0';
… …
end process;
由于仿真系统已将第1块~第4094块均设置为坏块,故固存页地址跳过了这些地址,当页地址为300h时,固存页读地址使能信号rd_page_adden保持无效,cntt计数失效,固存读停失败。仿真如图4所示。
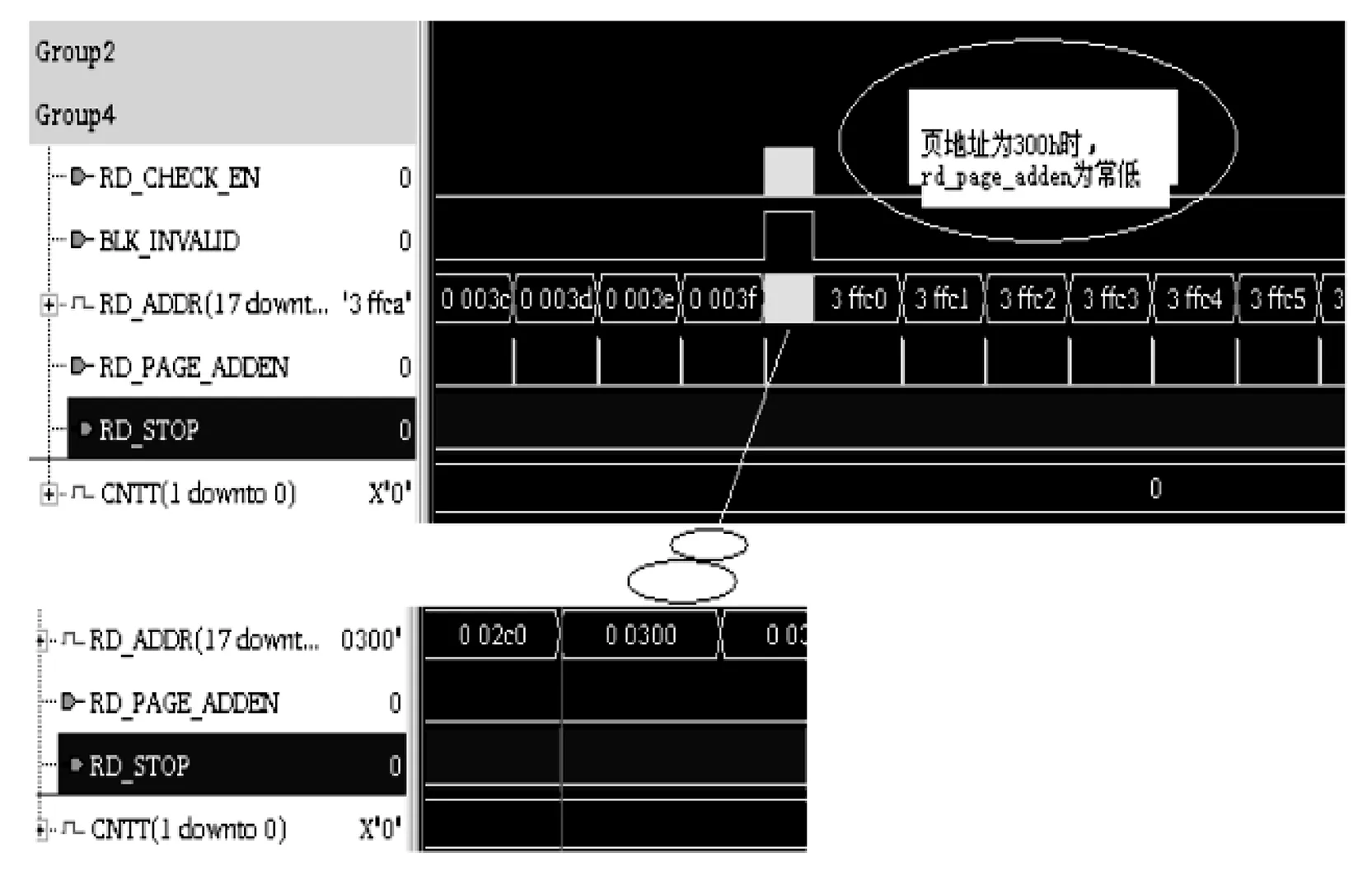
图4 地址为300 h时,信号RD_PAGE_ADDEN为低电平
2.2.2 读停设计优化
固存读停失败的原因是未考虑坏块对判停位置的影响。针对读停失效的修改方法是增加对坏块的考量,增加坏块标志信号blk_invalid的判断。若固存准备读停时遇到坏块,信号cntt正常进行计数,计数到达“10”时,信号rd_stop有效,可令固存读停,优化后的代码如下所示:
process(rst_n,clk)
… …
if(zs_rd_addreq='1')then
cntt <=(others=>'0'); //备注;当blk_invalid为1时,表示遇到坏块。
elsif( (rd_page_adden='1')or (blk_invalid ='1'andrd_check_en = '1') )and(rd_addr(width downto 0)="000" & x"0300")then //备注:准备读停时,增加对坏块的考虑
cntt <=cntt+1;
… …
end process;
2.3 坏块分布对固存写停的影响
2.3.1 写停问题描述
固存在工作时,若写到最后一块,要求可以自动写停。令固存模型的最后一块为坏块,仿真发现固存写到最后一块时,未写停,而是对最后一块重复写,导致数据出错。原因在于,当固存最后一块为坏块时,固存控制FPGA会跳过最后一块,最后一页地址"111"&x"fffff"无法执行到,即if语句条件不成立,写溢出信号wr_overflow无法置高,固存无法写停。出错的代码如下:
elseif (wr_addr = “111”&x”fffff”) then //备注:32’h7fffff即8388608d
wr_overflow <= ‘1’; //备注:8388608/64 = 13072,即最后一块的末页
2.3.2 写停设计优化
针对固存最后一块为坏块的工况,不判最后一块的末页,改为判最后一块的首页,即页地址由fffff改为fffc0,优化后的代码如下所示:
elseif (wr_addr = “111”&x”fffc0”) then //备注: fffff-fffc0 = 3f,即63
wr_overflow <= ‘1’; //备注:8388608/64 = 13072,即最后一块的末页
此时if语句条件满足,写溢出信号wr_overflow有效(高电平),固存可写停。
2.4 坏块分布对数据处理安全性的影响
2.4.1 坏块连续分布验证的必要性
固存一般应用在数据处理系统,数据处理系统对数据处理速率比较敏感,在全速率工作时,要求数据流畅传输,不阻塞。但由于固存本身物理特性,写固存前需要对其进行擦除,如果固存连续出现坏块,则需对其进行连续擦除,直到擦到好块为止[10-11]。数据处理系统的载荷输入端不间断地向固存输入载荷数据,如果坏块连续出现,固存一直处于擦除流程,不接收载荷数据,数据会阻塞在固存前端,如前端缓存FIFO,造成FIFO写溢出,导致数据丢失。故有必要验证坏块连续分布对数据处理系统工作安全性的影响。
2.4.2 坏块连续分布验证过程
令固存模型在擦除时连续五次遇到坏块,仿真系统设置方法如下:
case (erase_block_addr)
16’h0000,16’h0001,16’h0002,16’h0003,16’h0004: force_sts_fail = 1’b1;
default: force_sts_fail = 1’b0; //备注:force_sts_fail低电平表示擦除时遇到好块
end case
令固存连续出现5次坏块时,发现固存数据输出端丢失数据。输出数据记录文件内容(部分)如下所示,发现计数区丢失,表明固存丢失数据。
L1:1acf fc1d 540f 0000 00ff aaaa aaaa aaaa
L2: aaaa aaaa aaaa aaaa aaaa aaaa aaaa aaaa
L3: aaaa aaaa aaaa aaaa aaaa 3fff 1234 1234
L4: aaaa aaaa aaaa aaaa aaaa 3fff 1234 1234
仿真如图5所示。期望的第一帧数据计数区应为“0001”,计数区位置应在数据区“1234”前,但因固存连续出现坏块,导致计数区丢失。
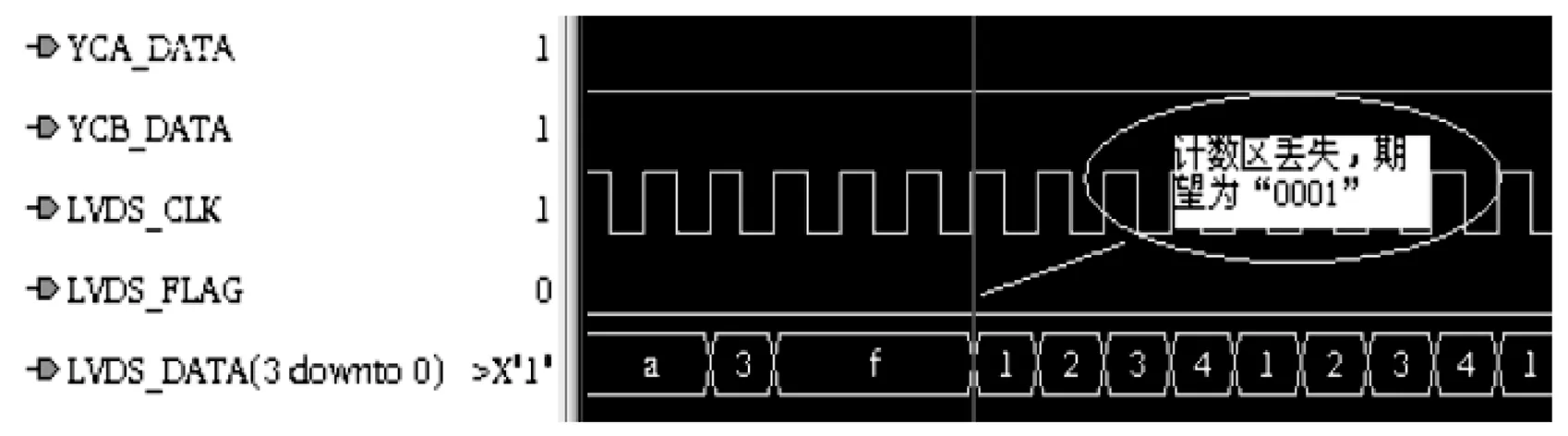
图5 仿真波形显示丢失计数区
在仿真系统中令坏块连续出现的次数逐渐减小,直到固存输出端数据正常。此时坏块连续出现的次数为3。
2.4.3 坏块连续分布对数据处理系统安全性的启示
仿真结果表明,当坏块连续出现4次及以上时,数据处理系统会丢失数据。为此,设计对坏块的控制需进行两方面的考虑。
1)研读固存芯片手册,向芯片厂商求证固存坏块是否会连续出现4次或4次以上。若固存芯片厂商不能保证坏块分布可靠性,则需对数据处理系统性能做出限制,如降低载荷输入速率。
2)若载荷数据速率不允许降低,可监测固存前级缓存FIFO的编程满信号。若连续出现坏块, FIFO发生写溢出,将FIFO的编程满信号通过遥测通知地面控制站,地面控制站可将对应通道的错误数据丢弃,改用备用通道数据。
3 结语
针对固存物理特性造成的坏块产生不可预知性,设计了坏块产生受控的闭环仿真系统,提供了存储三种坏块表的EEPROM模型和可反馈坏块信息的固存模型,并对坏块表维护过程和坏块分布对固存工作状态的影响进行了仿真验证,实现了坏块分布的全面覆盖及坏块管理结果的记录可查。为适应当前航天产品型谱化工作,下一步将对坏块仿真系统所含模型进行模块化封装,以期可通过修改遥控指令文件、EEPROM模型和固存模型参数,增强仿真系统在不同型号航天产品中的通用性。
参考文献:
[1] Samsung,K9K8G08U0A [EB/OL],http://www.samsung.com/Products/Semiconductor,2006-1-10.
[2] 乔立岩,张 鹏,魏德宝,等.一种新型NAND Flash 坏块管理算法的研究与实现[J]. 电子测量技术, 2015,38(11):37-41.
[3] 彭 兵,步 凯,徐 欣, NAND Flash坏块管理研究[J]. 微处理机,2009,2(4) :113-115.
[4] 宋秀兰, 吴晓波.高性能验证平台设计与搭建[J]. 电子器件,2008,31(6):1819-1821.
[5] Synopsys VCS MX/VCS MXi user guide [S] .Version E-2011.03-SP1.2011.
[6] Synopsys.Design ware AHB Verification IP databook[S].March 24.2003.
[7] Synopsys.Reference verification methodology user guide[S].September 2004.
[8] 邢 旺,郁聪冲.数据记录器中NAND Flash的坏块管理方法[J].船舰电子工程, 2016, 36(8):132-134.
[9] Takeuchi K. Novel co-design of NAND Flash memory and high-speed solid-state drives [J]. VLSI circuit,2009,44(4):1224-1227.
[10] 张 鹏,乔立岩.NADN Flash坏块管理算法研究与实现[D].哈尔滨:哈尔滨工业大学, 2015.
[11] 杨 博,李 波.基于NAND FLASH的嵌入式系统启动速度的研究[J]. 计算机测量与控制,2010,18(8):1869-1875.
