遥测网络时间同步技术实现及检测方法研究
2018-04-25,
,
(中国飞行试验研究院,西安 710089)
0 引言
遥测是集传感、采集、通信和数据处理为一体的一门综合性技术,在军用和民用飞行试验领域有着广泛的应用。在传统飞行试验中,遥测为飞行试验对象的实时监控提供了主要数据来源。随着航空武器装备的发展,现代飞行试验从单机试飞向多机协同试飞的模式转变,遥测带宽需求日益增长,双向传输需求日趋紧迫,有力推动了遥测从传统的“点对点”单向传输,朝着双向的网络化方向发展。遥测网络的概念已经出现,技术框架也初步形成。遥测网络作为一种特殊的远距无线传输网络,是连接高速移动试验对象(飞行器)节点和地面试验设施、实现空地一体化综合测控网络系统的重要组成部分。遥测网络中的传输时延和试验对象间的时间同步,是影响遥测网络应用中的实时性和同步性的关键因素,必须重点探讨和解决。
1 遥测网络中试验对象节点间数据时间同步的概念
传统的、基于IRIG 106遥测标准的遥测传输模式,采用FM/PCM串行传输方式,具有较好的实时性。实际应用中,当遥测速率、遥测距离等确定后,传输时延基本上是确定的。由于过去飞行试验基本上都是“单机试验”,遥测监控模式也是“单机监控”,“时间同步”基本上只涉及同一架飞机内测试参数的时间同步问题。针对个别同一试验中多试验对象的遥测监控,也是通过“单机监控”方式实现的,飞行试验过程中多试验对象间的数据时间同步问题基本上未涉及,相关数据时间同步处理只是在事后数据处理中完成。
信息化条件下的多机协同试飞和遥测网络的应用,使同一飞行试验中的多个试验对象遥测数据融合、实时处理、多试验对象同时监控将成为常态,多试验对象间的数据时间同步成为必须解决的技术问题之一。
飞行试验遥测网络是一种特殊的远距、宽带、基于无线传输的实时测控网络,加之飞行试验对象(飞行器:空中高速移动节点)具有高速、大机动等特点,遥测网络的组网方式不尽相同,使遥测数据传输的电磁环境相对复杂,影响了遥测网络数据传输的时间延迟和时间同步。针对飞行试验遥测网络微妙级的时间同步要求(同一试验对象内为1微秒、不同试验对象间为100 μs),遥测网络中多试验对象间时间同步的技术实现与检测都是技术难题。
在iNET的技术要求中,把多试验对象间测量数据时间同步定义为:在测试过程和通过试验对象端(TAS)、地面站端(GSS)及无线链路(RF)的通信过程中,从多个分立试验对象上同时读取到的两传感器参数之间的最大时差。
从上述定义中可以看出,多试验对象间测量数据的时间同步包括了机载测试网络(aNET)中的数据采集同步和遥测网络(rfNET)中的数据传输同步两个部分。机载测试网络系统(aNET)是一种基于光缆和电缆的测控网络,网络中已采用了PTP精确时间同步协议,目前数据时间同步已达到1微秒级的应用精度;而遥测网络(rfNET)目前还处于研究与试验阶段,iNET标准中推荐采用NTP时间同步协议,不同试验对象间数据包传输的时间同步目前还没有实际使用值,预计在毫秒级。因此,要提高多试验对象间测量数据的时间同步,遥测网络(rfNET)中的数据包传输环节是主要因素,需要重点研究和探讨。
按照iNET标准对遥测网络的定义,我们可以把遥测网络(rfNET)中的数据传输同步理解为多试验对象端(TAS)间的数据包的时间同步,即在遥测网络中,多个试验对象端(TAS)同时发送的数据包,经过RF无线链路传送,到达地面站端(GSS)接收后,多个试验对象端(TAS)数据包收到时间的最大时差。显然,该时差就是试验对象端(TAS)上的数据包发送到地面站端(GSS)接收过程中的传输时延之差,是遥测网络中多个试验对象节点数据传输时延不相等所造成,必须采用相关同步技术给以修正。
2 遥测网络中的时间同步协议和同步原理
2.1 网络时间协议(NTP)
网络时间协议(NTP :Network Time Protocol)是用来使网络中的计算机或设备单元对其服务器或时钟源提供高精准度的时间校正(LAN上与标准间差小于1毫秒,WAN上几十毫秒),且可通过加密确认的方式来防恶毒的协议攻击。该协议是美国iNET遥测网络标准中推荐的遥测网络数据传输时间同步协议。RF网络单元标准中的第10条:通用网络协议和服务中的10.3 款,指明遥测网络数据传输的时间同步采用RFC 1305网络时间协议,其工作原理如图1所示。客户端或设备首先向时间服务器端发送一个NTP时间同步报文请求,其中包含了该报文离开客户端的时间戳T0(以客户机时间为参照),当时间服务器端接收到该包时,依次填入报文到达的时间戳T1(以服务器时间为参照)和离开的时间戳T2(以服务器时间为参照),然后立即把报文返回给客户端,客户端在接收到响应报文时,记录报文返回的时间戳T3(以客户机时间为参照)。客户端用上述4个时间戳值就能够计算出NTP报文的传输迟延和客户端节点与时间服务器端节点之间的时钟偏差。客户端使用时钟偏差来调整本地时钟,使其时间与时间服务器端的时间一致。NTP协议假设 NTP 请求和回复包传送时延相等,我们用δ表示往返时延,则:

图1 NTP同步原理
我们用θ代表客户端与时间服务器之间的时间偏差,则:
θ= [(T1-T0)-(T3-T2)]/2
可以看出δ和θ只与T1、T0差值及T2、T3差值相关,而与T1、T2差值无关,即最终的结果与时间服务器上请求处理所需的时间无关。因此,客户端可通过T0、T1、T2、T3计算出其与时间服务器之间的时差去调整本地时钟,即可完成时间同步。NTP时间同步的局限性在于虽然假设携带时间戳的报文经历往返相等的时间迟延,但无法克服报文单向时延所造成的影响,同时NTP在高层(应用层)用软件方式打时间戳,越靠近应用层,同步精度越低,且具有不确定性,影响了时间同步的精度。
网络时间协议(NTP)是典型的网络授时同步协议,通过在时间服务器和客户端之间互相传递时间戳,计算出客户端相对于服务器的时延和偏差,从而实现网络节点间的时间的同步。NTP协议机制严格、实用、有效,网络开销少,可以在各种网络上获取毫秒级的可靠时间同步。在遥测网络中,我们可以假设飞行器上试验对象端(TAS)为客户机端,地面上的遥测地面站端(GSS)为服务器端,应用NTP协议即可为整个遥测网络设备间的时间同步问题提供了一种解决途径。
2.2 精确时钟同步协议(PTP)
精确时钟同步协议(PTP:Precision Time Protocol)是由网络精密时钟同步委员会提出,于2001年中获得IEEE仪器和测量委员会美国标准技术研究所(NIST)的支持,并于2002年底获得IEEE标准委员会通过,作为IEEE1588标准,其全称是“网络测量和控制系统的精确定时同步协议标准”。该标准旨在解决以太网的定时同步能力不足问题,减少传统技术实现时间同步所带来的额外布线开销,如IRIG-B等。标准定义了一个在测控网络中, 与网络交换、本地计算和分配对象有关的精确时钟同步协议( PTP) 。此协议特别适合于基于以太网的技术, 精度可以达到微秒级的范围。该协议提出后就广泛应用于各类以太网以及部分地面测控网络中。
针对现代飞行试验遥测网络时间同步的新需求和遥测网络特点,以及网络时间协议(NTP)毫秒级的同步精度和固有缺点,难以满足多机协同试飞高精度的时间同步要求。并开始逐步将该协议推广到飞行试验遥测网络中,例如机载采集系统的精准时间同步等。利用该议并采用软硬结合的方法,可以把遥测网络的时间同步精度提高到微秒级。
精确时钟同步协议(PTP) 使用时间戳来同步本地时间。一个简单的PTP系统包括一个主时钟节点和多个从属时钟节点。具有主从时钟设备的节点发送和接收有时间信息的报文, 并且在每一个发送和接收的报文中加上发送和接收的时间戳。有了时间戳,接收方就可以计算出自己在网络中的时钟误差和延时。具体同步过程如图2 所示。
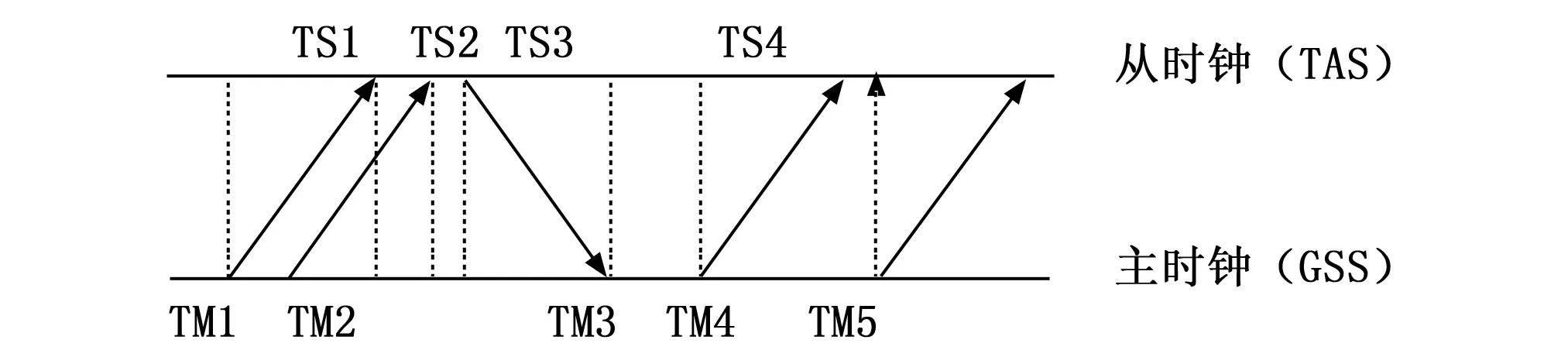
TM1:同步报文发送时间;TS1:同步报文接收时间;TM2:跟随报文精确发送时间;TS2:跟随报文精确接收时间;TM3:延迟请求报文精确接收时间;TS3:延迟请求报文精确发送时间;TM4:延迟回复报文精确发送时间;TS4:延迟回复报文精确接收时间;TM5、TS5:实现精确同步时间;图2 PTP 同步过程
从图2 可知,发送的报文包括:同步报文( Sync) 、同步报文之后的跟随报文( Follow_Up) 、延时请求报文(Delay_Req) 、延时请求的回复报文(Delay_Resp) 。用一个标准时间的时钟( 主时钟) 来校正其它的时钟(从时钟),主、从时钟的时间差和报文传输延迟计算如下:
主、从时钟节点间传输延迟 = 同步报文接收时间TS1- 同步报文发送时间TM1;
从、主时钟节点间传输延迟 = 延迟请求报文接收时间TM3-延迟请求报文接收时间TS3;
延迟时间 =(主、从时钟节点间传输延迟 + 从、主时钟节点间传输延迟)/2
偏离时间 = 同步报文接收时间 - 同步报文发送时间 -延迟时间
用δ表示延迟时间,则:δ= [(TS1-TM1)+(TM3-TS3)]/2
用θ代表主时钟端与从时钟端之间的时间偏差,则:θ=(TS1-TM1)-δ
根据偏离时间可以精确地对从时钟进行时间校正,在这个过程中,假设传输介质是对称均匀的。
PTP协议的核心思想是网络中最精确的时钟(主时钟)以包交换的方式同步所有其它时钟(从时钟),需要专用的硬件,在底层(物理层)打时间戳(越靠近物理介质层,同步精度越高),支持在物理介质层、驱动程序层或应用软件层检测和记录报文发送和接收的时间戳,避免了报文处理时间的不确定性,时间同步可达到微秒级。因此PTP协议是飞行试验遥测网络系统时间同步的最佳选择,在该领域的深入应用还有待于进一步试验与验证。
3 基于IEEE 1588的遥测网络时间同步的技术实现
3.1 技术实现思路
按照前述遥测网络(rfNET)中的数据传输同步的概念,多试验对象端(TAS)间的数据时间同步,即在遥测网络中,多个试验对象端(TAS)同时发送的数据包,经过RF无线链路传送,到达地面站端(GSS)接收后,多个试验对象端(TAS)数据包收到时间的最大时差,技术实现途径是在试验对象端(TAS)和地面站端(GSS)的核心部件:RF收发器中集成1588 IP核组件。RF收发器中的1588 IP核组件应具备三个基本功能,一是实现主、从时钟功能;二是在物理层用硬件方法打时间戳;三是辅助PTP协议的运行。1588 IP核组件的常见实现形式是1588芯片或FPGA逻辑。
3.2 支持IEEE 1588协议的RF网络收发器技术方案
一种基于DP83640芯片、支持IEEE 1588标准的RF网络收发器技术方案如图3所示。

图3 支持IEEE 1588协议的RF网络收发器技术方案框图
该方案是在常规的RF网络收发器中嵌入DP83640 1588芯片,辅助精确时间同步的实现。DP83640 芯片是美国国家半导体公司推出的具备IEEE 1588 协议硬件支持功能的以太网物理层芯片,它内置了一个精度为8ns、可BDS/GPS授时的IEEE 1588 数字时钟,能够在报文发送和接收时精确标记时间戳。DP83640 是物理层(PHY)芯片,不能直接与没有MAC网络控制器的MPU处理器通信,需要在二者之间加入MAC控制器芯片,通过介质无关接口(MII)与MPU处理器连接,实现数据及时间戳等控制信息的交换。MPU同时还要运行网络的上层协议,与MAC一起构成一个完备的TCP/IP栈,提供对RF网络和PTP协议的运行支持。
3.3 遥测网络中多试验对象节点间时间同步的技术实现
遥测网络中两试验对象节点之间的数据时间同步的技术实现框图如图4所示。两个试验对象节点和一个遥测地面站端均配备有支持IEEE 1588协议的RF网络收发器。我们假设遥测地面站端中的RF网络收发器时钟为主时钟,两个试验对象节点中的RF网络收发器时钟为从时钟,按照PTP协议同步原理,主时钟节点周期性向从时钟节点发同步请求报文,首先实现主时钟和从时钟的对准(同步),并分别测量出两个试验对象节点数据包到遥测地面站端的传输延迟时间,通过计算和修正,即可实现两个试验对象节点间的数据时间同步。
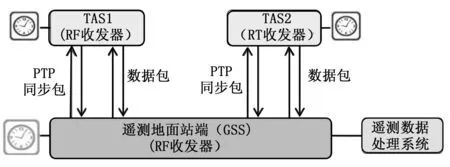
图4 遥测网络中多试验对象节点间数据时间同步的技术实现框图
4 遥测网络中的时间同步检测方法
常规测控网络中的时间延迟检测,长期以来也一直是一个难以解决的技术难题。原因之一是常规测控网络中各网络节点之间时间没有统一的授时,时间并不同步;原因之二是常用的通信协议不能使信息包携带信息包经过网络节点的时间信息。而遥测网络是一种特殊的测控网络,各试验对象和遥测地面站节点,均有基于GPS/BDS授时的精确时统,遥测网络中各网络节点之间的时钟高度同步(纳秒级),同时,遥测网络中采用了NTP或PTP时间同步协议,信息包均带有精确的发送、接收时间戳,因而,遥测网络中的时间延迟和时间同步检测相对容易实现。
当然,遥测网络也有它的特殊性,如上所述,遥测网络中时间同步的实现可以采用不同的同步协议和方法, 但前提条件均是“假设传输介质是对称均匀的”,而实际中的遥测网络具有多种组网方式,在点对点组网方式中,可以认为传输介质是对称均匀的,而在多点对一点的组网方式中,传输介质对称均匀是不现实的。因此,作为一种通用性和准确性的遥测网络时间同步检测方法,必须采用一种与时间同步协议无关、可适应各种遥测网络模式的方法来进行时间同步检测。同时,还应对“传输介质不对称均匀”的情况进行分析,提供必要的修正方法。
检测方法:遥测网络时间同步检测方法如图5 所示。图中是由两个试验对象端(TAS1、TAS2)到一个地面站端(GSS),组成的两点到一点的典型遥测网络,每个端点都具有GPS/BDS授时的精确的时钟,测试计算机在相关软件配合下,实现两个试验对象端(TAS1、TAS2)对地面站端的数据传输时延测量、时间同步计算、显示和数据存储。

图5 遥测网络时间同步检测方案
检测原理:如图6所示,由检测计算机启动,地面站端在T0时刻,以广播方式发送一条报文作为检测请求报文, 两个试验对象端(TAS1、TAS2)分别接收到检测请求报文后, 打上各自的本地时间戳T1、T2,放入检测响应报文中,然后在T3、T5时刻分别向地面站端(GSS)返回检测响应报文, 地面站端(GSS)收到检测响应报文后打上本地时间戳T4、T6,检测计算机从地面站端(GSS)中获取检测响应报文后,取出各自的发送和接收时间戳, 发送和接收时间差,就是检测报文的传输时间延迟,两个试验对象端(TAS1、TAS2)到地面站端(GSS)的传输时间延迟之差,即是两个试验对象端(TAS1、TAS2)的同步时间,如图6所示。

图6 两个试验端同步时间
计算方法:
TAS1到GSS的传输时间延迟 =(T4-T3)
TAS2到GSS的传输时间延迟 =(T6-T5)
TAS2和TAS1同步时差 = (TAS2到GSS的传输时延- TAS1到GSS的传输时延)
或:TAS2和TAS1同步时差=(T6-T4)/2
5 遥测网络中传输时延分析和同步时差修正
5.1 遥测网络中传输时延因素分析
遥测网络中数据传输时延可以定义为:从试验对象端(TAS)发送数据包,到地面站端(GSS)接收到数据包的整个传输过程中的最大延迟时间。
参考常规无线网络时间延迟划分,遥测网络中的传输时延也应包括:
1)发送时间(Send Time):源节点完成一帧数据和发送请求到MAC层所需时间;
2) 访问时间(Access Time):链路层协议等待信道空闲的时间,主要依赖信道负载;
3) 传输时间(Transmission Time):物理层发送数据包的时间,该时间取决于数据包的大小和遥测发射速率;
4) 传播时间(Propagation Time):数据包在发送节点到接收节点传输介质中的传播时间,该时间依赖于收发方的物理距离和传播媒质特性;
5) 接收时间(Reception Time):物理层接收数据包所花费的时间,接收时延与传输时延相对应,并且与传输时延有重叠:
6) 接收处理时间(Receive Time):接收节点重新组装消息并传递给上层应用所需的时间;
5.2 遥测网络中多试验对象间同步时差的修正
如前所述,网络时间同步不管是使用NTP协议还是PTP协议,同步原理均假设“传输介质是均匀对称”,在此假设条件和局域网环境下,多节点之间的传输时延基本上是相同的。那么,影响网络中多节点间时间同步的主要因素:各节点中的时钟同步和传输时延,通过NTP或PTP时间同步协议均可得到修正,使常规测控网络系统的时间同步精度可达到毫秒级或微秒级。
针对特殊的飞行试验遥测网络来说,通常多试验对象若在同一空域中试飞,使用同一遥测网络,其数据结构、传输协议、遥测速率、传输条件等软硬件环境基本相同,可以认定“传输介质是均匀对称”的假设条件成立,也就是说各试验对象节点的地面站端节点的数据传输时延应该基本相同,通过PTP协议,数据传输时延之差(时间同步)应可满足要求。但是,针对一些特殊试验,若试验对象节点不在同一空域(到地面站的距离不同),试验对象节点的数据包大小不一样、遥测速率不同等因素,使“传输介质是均匀对称”的假设条件并不成立,也就是说各试验对象的地面站传输时延不相同,例如,若两个试验对象到地面站的距离相差为300 km,传播时延就差1 ms,导致时间同步时差过大。在这种情况下,必须通过分析,找到修正方法,进行修正。
另外,在准实时数据传输情况下,对于试验数据的同步处理,可采用“事后时间同步处理方法”,即先到的数据包等待后到的数据包,然后按数据包发送时间对齐的方法来实现数据的精确同步。
6 结束语
遥测网络是空地一体化综合测试网络系统的核心组成部分,由于试验对象节点(飞行器)的快速移动,遥测网络环境相对复杂,具有诸多的不确定性,传输时延长短,影响遥测网络的实时性,时延之差,影响遥测网络的时间同步性。目前,遥测网络还处于研究与演示验证阶段,本文提出的一些遥测网络时间同步技术实现思路和检测方法,有待在遥测网络系统研发和飞行试验演示验证中进行验证和不断完善。
参考文献:
[1] 白效贤,杨廷梧,等. 航空飞行试验遥测技术发展趋势与对策[J]. 测控技术,2010(11):6-9.
[2] 袁炳南,霍朝晖,白效贤. 新一代遥测网络系统—TmNS[J]. 测控技术,2010(11):18-21.
[3] iNET System Requirements [M]. Version 2007,1.
[4] iNET Telemetry Network System Architecture[M]. Version 2007,1.
[5] 张艳芳,王 平,谢吴飞,等. EPA 时间同步测试方法与实现技术[J]. 计算机工程与应用,2007(16):146-148.
