便携式雷达综合检测平台及智能故障诊断系统的设计
2018-04-25,,,
, , ,
(1.西安黄河机电有限公司设计研究所,西安 710043; 2.海军工程大学 电子工程学院, 武汉 430033)
0 引言
活动目标侦察校射雷达可以在夜间或恶劣气候条件下侦察敌方运动中的人员、车辆、坦克和舰船等目标,测定其坐标和速度,并测定己方射弹地面炸点对目标偏差以校正火炮射击。某型活动目标侦察校射雷达作为新一代定型装备,已经大量装备我军地面侦察部队。在实际作战使用维修以及装备保障时,研制厂家研制了该雷达的中继级检测维修车。检测维修车配备了三大单元和显示组合独立的检测台,以及专家诊断系统,但是由于配套设备繁多、造价高昂,部队装备数量很少,难以解决该雷达特别是野战基层级维修保障能力严重不足的问题。原有的检测维修车虽然配备了专家系统,但是专家系统的故障检测准确率偏低,专家系统知识库已不能满足部队日益增长的维修需求和部队作战任务[1-2]。
为解决该雷达维修成本高、野战基层级维修保障能力严重不足和日常训练的问题,提高专家系统故障检测准确率,研制设计了一种便携式雷达综合检测平台(简称检测平台)[3],该平台以满足部队需求、智能化设计思路,多功能集成及多样化检测手段,将雷达检测设备、模拟训练器和基于BP神经网络的智能故障诊断系统的功能集于一体,实现检测平台的集成化、小型化和检测的智能化。
1 主要功能和技术指标
该检测平台主要功能和指标如下:
1)检测平台可实现对雷达三大单元、显示组合的独立检测、自检结果的采集和汇流环的自动检查,检测项目覆盖三大单元和显示组合技术条件规定的所有条目;
2)产生跳频编码、量程控制、目标特性、 高低控制、高压控制、DGC中频增益控制曲线等控制信号;
3)产生并模拟和路以及差路模拟目标视频信号,实现以下功能:
(1)模拟运动目标:模拟目标个数:3个;模拟目标速度范围:0~200 km/h,可任意设置; 信号幅度连续可调;
(2)模拟炸点目标:炸点方位、距离、持续时间和多普勒频率可设定;数量:3发;
(3)信号灵敏度检测:模拟信号幅度±0.1 V;方位、距离可任意设定,多普勒频率为0~200 Hz;数量:3个;
(4)跟踪精度测试:实时录取方位和距离跟踪数据,并进行闭环跟踪精度的图像和数据处理。
4)智能故障诊断系统:具备神经网络的自动故障分析、报警和预测能力,同时具备可以根据历史故障信息进行深度学习网络自训练和校正能力;
可根据雷达三大单元的自检信息或故障现象,利用声音、文字、图像等多媒体手段,对维修人员现场维修提供强大的技术支持和维修指导;
在雷达单元维修过程中可随时调用,保证雷达现场维修时的故障分析和维修能力。
5)覆盖率:可更换单元检测覆盖率不小于95%。
6)故障检测率:电子线路板故障检测率不小于95%。
7)虚警率:电子线路板故障检测虚警率不大于2%。
2 硬件组成及工作原理
检测平台的硬件组成如图1所示,其构成部分有:主控计算机板、雷达综合信号产生及处理板、时序检查板、DGC接口板、母板、图像信号处理组合、综合电源、加固液晶屏、操作面板、固态继电器、机箱、24V直流稳压电源、一体化键盘机箱、信号电缆、电源电缆和测试电缆组成。
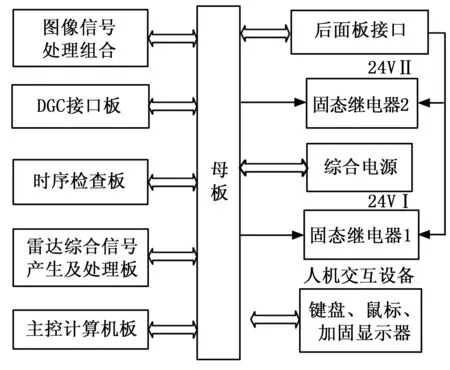
图1 检测平台硬件组成图
主控计算机板采用PC104嵌入式计算机为主控计算机,以3片BK51SD单片机作为从机,从机分别位于主控计算机板、雷达综合信号产生及处理板和时序检查板,采用多微机共总线分布式控制技术,通过DPRAM双端口存储器完成与从机数据交互。主控计算机板通过LVDS接口连接加固液晶显示屏,通过PS/2接口连接键盘鼠标,通过音频接口连接内置音箱,以实现人机交互[4-5]。主控计算机板运行智能故障诊断系统和雷达综合检测软件,并用于完成对天线座单元的检测,是检测平台的核心控制模块。
雷达综合信号产生及处理板该板由3个DDS控制器AD7008、FPGA、放大滤波电路、调制电路、频率自检电路和加法电路等组成[6]。主要用于完成对主控台单元的检测,并具有模拟训练器的主要功能。
时序检查板主要由BK51SD单片机、DPRAM、CPLD、光电耦合器、基准时钟滤波放大电路等组成,主要用于为本组合和被测设备提供时序和状态控制信号,同时在加电管理软件的控制下,通过光耦控制两个固态继电器进行加电控制,其中24 V Ⅰ用于本组合加电,由综合电源产生5 V、15 V和200 V三种电源;24 V Ⅱ用于被测单元加电。
DGC接口板主要由BK51SD单片机、CPLD、E2PROM、DPRAM、D/A转换器等组成,主要用于完成对收发仓单元的测试,同时负责产生DGC接收机增益控制曲线。
图像信号处理组利用FPGA及大规模存储电路,产生行同步信号、帧同步信号和二次图像信号,以完成对雷达显示组合的测试和维修。
3 智能故障诊断系统设计与实现
3.1 诊断系统原理设计
检测平台的智能故障诊断系统综合了BP神经网络和专家系统的优势。神经网络具有强大的非线性映射能力,而且还具有自适应、自学习、容错性和并行处理等性质。在工作过程中,根据一组输入,神经网络便按已确定的权值计算出对应的输出,同时还可以根据其输出与实际情况的差值,按各训练过程相同的学习规则修改权值,即进行自学习,使之能适应外界环境的变化,采用简单的神经元连接而形成的复杂网络系统,具有高度复杂的非线性动力学系统特点[7]。
BP网络是一种多层前馈神经网络,其神经元的传输函数为S函数,可以实现从输入到输出的任意的非线性映射,用于浅层次经验推理。专家系统主要用于深层次符号推理,可通过内容进行匹配逻辑推理。通过利用神经网络与专家系统相结合的方式,不仅可存储信息,处理统一网络系统,还可对知识进行存储并解决问题,推理故障发生整个过程[8-9]。
对于故障诊断系统来讲,故障表示是故障系统的首要问题。文中假设F为某雷达系统故障表,其中各故障的属性组成固定属性集Z,F={f0,f1,f2…fn},其中,f0表示正常系统,f1,f2…fn代表各个故障。
ASi={Ai|Ai作为某雷达的动态属性,表示故障fi导致的差错};IN-AS={AK|AK为某雷达的输入属性,决定某雷达动态特性}。

AS=AS′∪IN-AS
其中,AS为雷达系统故障集F所对应的属性集,令AS={A1,A2,…,An},L是系统对故障进行的具体诊断,则在t时刻对雷达系统进行的具体诊断故障为:fi=L(A1(t),A2(t),…,An(t)),i=0,1,…,n。自变量可取到是属性集AS在各时刻t的所有取值,对雷达系统的故障诊断结果是由故障集多个故障的逻辑运算综合而成。
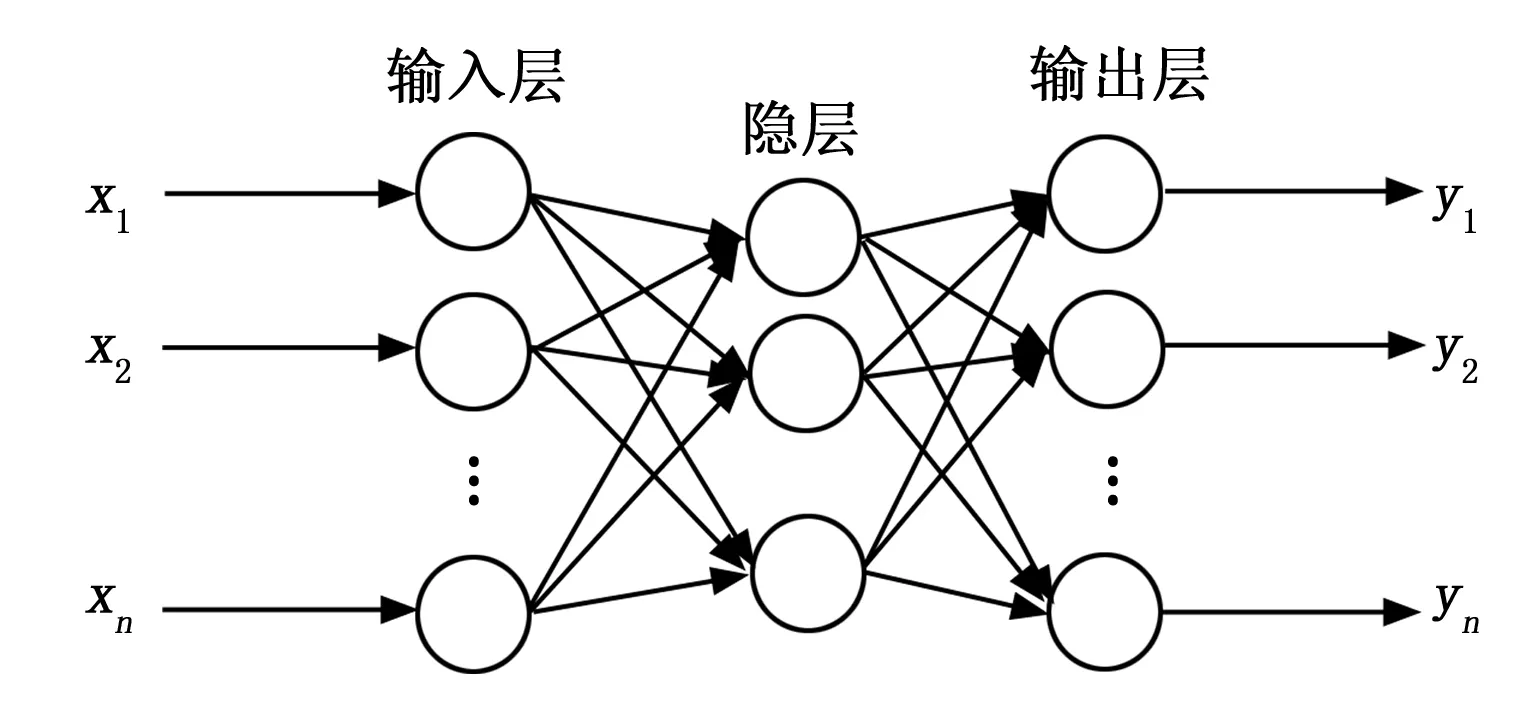
图2 神经网络结构
基于故障检测机理,该平台神经网络检测系统主要划分为3层模块,3层次网络结构,如图2所示。前模块分别实现故障原因输入;中间模块为BP神经网络,实现数据分析处理;后模块为反逻辑,实现清晰化[10]。其中,为保证合适的神经网络节点数,降低网络计算复杂度与训练难度。神经网络各层节点数主要依据先前雷达故障发生经验公式设定,并依据训练结果而调整。具体经验公式如下:
nimpic=2ninput+1
(1)
(2)
(3)
nimpic=log2ninput
(4)
其中,nimpic为隐藏层神经元个数,ninput为输入层神经元个数,noutput为输出层神经元个数,a取值为1~10。神经网络训练算法如下:
1)输入层节点i,其输出等于xi,i=1,2,…,n;
2)隐含层节点j,其输入hi,输出Oj分别为:
(5)
(6)
其中,j=1,2,…,m;Tj=wn+1jxn+1,xn+1=-1。
3)输出层节点,其输入hk,输出yk分别为:
(7)
(8)
其中,k=1,2,…,l;Tj=wm+1kOn+1,Om+1=-1。
(9)
(10)
3.2 系统设计实现
3.2.1 系统软件概述
综合检测平台采用定制裁减的Win XPE嵌入式操作系统,具有内核小、占用系统资源少、启动速度快、增强写保护等特点。研发了基于WinXPE操作系统下的底层驱动软件、库维护软件和应用程序,实现了Windows系统下的实时控制及数据交换[11],最小采样周期50 ms。
研制开发了智能故障诊断系统、雷达综合检测软件、集总接口分配软件、直接数字合成DDS1和DDS2软件、通讯接口软件、模拟信号检测软件、接口采集软件、数模接口控制软件、DGC数据存储等软件,其中Win XPE系统环境下应用软件17个,FPGA软件4个、CPLD软件2个、数据存储软件1个。
雷达综合检测软件和智能故障诊断系统均采用delphi语言编写,通过二维矢量图形和虚拟仪表控制界面,使人机交互界面更加简单明确,易学易用。各软件受雷达综合检测软件统一调度,其核心目标是为智能故障诊断系统提供被测产品的当前信息。
3.2.2 主要技术难点
1)BP整神经网络结构调整及训练指标的确定。智能诊断系统的核心是知识,拥有的知识的多少及知识的质量决定了一个诊断系统所具有解决问题的能力。神经网络的知识获取与传统的专家系统知识获取完全不同,随着对BP神经网络算法研究的深入,发现该方法存在主要难点是网络的隐层节点数的选取上,基本上是根据经验采用试探法选取的。为了使神经网络更加有效地解决实际的故障诊断问题,需要找到其结构特性最能反映故障诊断问题的神经网络,并且其权值能比较精确地表示故障征兆到故障原因之间的非线性映射关系。这需要通过大量的实例来训练神经网络,并不断调整神经网络结构及确定训练指标,使得神经网络获得相应的领域知识。与传统专家系统的知识获取相比,它实际上大大节省了时间,而且由于它可以直接从数据中获取知识,所以也大大增加了知识的来源。
2)信息融合。对于未经学习的样本和远远偏离样本的输入数据,神经网络专家系统的诊断能力将下降,甚至可能得出错误的结论。因此,采用神经网络专家系统进行故障诊断时,对诊断对象的机理必须十分清楚。智能故障诊断系统在基于神经网络专家系统进行故障诊断的基础上,必须充分利用雷达综合检测软件提供的被测产品的其它的参数信息,通过信息融合,提高诊断的准确性。
3.2.3 故障诊断系统软件实现
智能故障诊断系统程序结构示意图见图3。在该系统中,知识库及推理机完全分离,知识库作为专家系统的核心,其内容修改由库维护软件完成。推理部分采用了神经网络和流程控制知识相结合的推理方式。推理机根据某雷达的当前信息,首先判断出是否出现异常,若异常,则根据原规则指定由哪个神经网络集成进行诊断。神经网络推理采用BP 网络的前向运算规则,其结果根据相应的神经网络集成运算得出,从而判断是否出现故障并指定故障发生的部位,并通过多媒体手段为用户提供详细的维修指导建议和操作说明[12]。
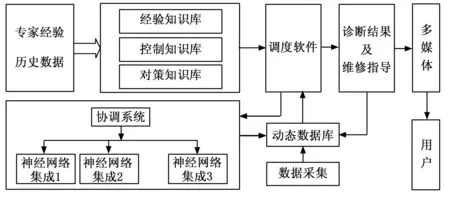
图3 智能故障诊断系统程序结构示意图
4 仿真测试与效果评估
4.1 测试结果
雷达故障系统诊断步骤如下:1)将雷达发射系统的故障样本输入到输入层,各节点也是该层神经网络神经元的输出;2)根据由经验值所得到的故障类型阈值去判定对应输出层神经元的最终输出结果。表1为由实际经验所得出的雷达发射系统实际故障样本和其对应特征值,表2为将各样本输入到神经网络输入层从而得到的对应训练结果,即雷达发射系统故障原因[13]。
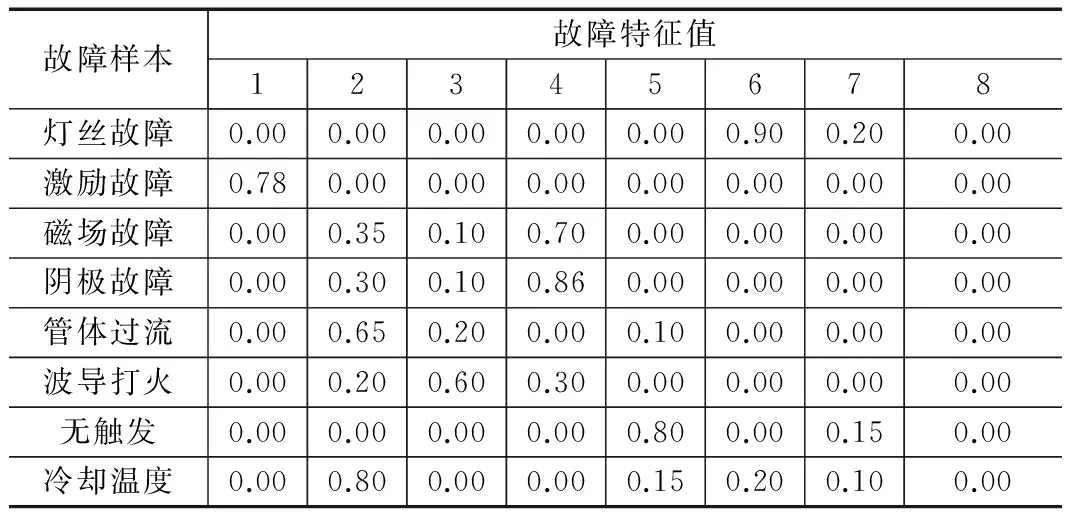
表1 典型故障样本

表2 典型故障样本网络输出值
将表1的数据进行归一化处理后, 以实际故障样本为网络的原始训练样本, 送入BP网络进行训练。网络输入层、隐含层和输出层节点数分别取8、9 和10 ,网络训练3625 次, 得出3 层BP 网络的各个连接权值和阈值。经过上述学习训练, 网络获取诊断发射系统的故障知识,网络目标输出“1.00”表示有故障发生,“0.00”表示对应的故障不发生。根据网络输出结果,将判决门限取0.85,即在某种故障模式下,网络的输出大于0.85,而其它均较小时,则判定为发生了该故障。训练结果表明,雷达发射系统故障诊断的准确性大幅提高。
4.2 测试曲线及诊断性能
图4为整个神经网络训练过程, 由结果变化曲线可以看出,经过37次迭代,神经网络训练结果可快速收敛到目标值0.0001,此时训练误差为8.2578e-005,表明其对故障检测性能良好。

图4 网络训练结果
在雷达05批产品中抽调一部进行试验,每个单元分系统分别人为设置故障和非故障样本共 30 组,以这8个分系统共270组样本检验智能故障诊断系统的诊断性能,其结果如表3所示。
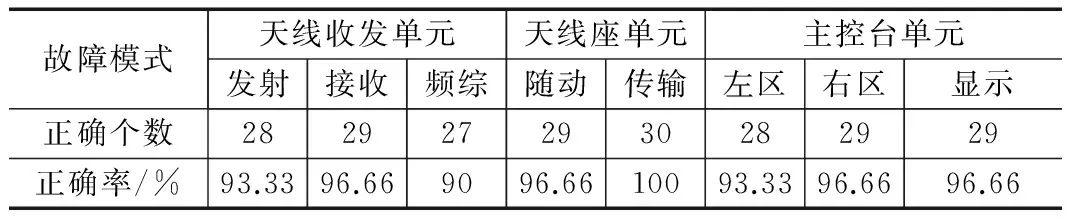
表3 智能故障诊断系统的诊断结果
从表3实测数据分析,所有的测试结果故障诊断正确率都在90%以上,表明该智能故障诊断系统的诊断性能远优于现有的检测手段。但是天线收发单元和主控台单元由于功能和线路设计复杂,故障诊断正确率偏低,说明该系统神经网络和专家系统还需进一步完善。
4.3 整体性能评价
在设计鉴定阶段,被测产品现场可更换单元(LRU)总数量为17个,检测平台可检测的可更换单元数量为17个,可更换单元检测覆盖率为100%。检测平台对于车间可更换单元(SRU)设置故障总数为100个,通过测试,其正确故障检测为99个,按照70%置信度计算,SRU故障检测率为98.96%,虚警率为0.04%,完全满足技术指标的要求。
经部队使用试验,检测平台以简单易用、功能完善、故障定位快速准确、携行方便等特点得到用户单位的广泛好评。
5 结论
综合检测平台是为满足某型雷达的野战基层级维修需要而进行研制的专用检测设备,集故障检测、性能测试和模拟训练功能于一体,可对某型雷达三大单元和显示组合进行独立的检查、测试和调整,并采用基于BP神经网络的故障智能诊断系统,大幅提升了对某型雷达的故障分析、故障定位和维修能力,可满足野战条件下装备的快速维修保障和训练,并适用于多级维修,提高了雷达在部队实装配备的综合诊断检测效率,为装备维修提供了有力的支持和保障。
参考文献:
[1] 张 翔,崔潇潇,王 洋,等. 基于机电混合式目标模拟的雷达制导半实物仿真关键技术[J]. 弹箭与制导学报, 2015, 35(4): 39-42.
[2] 许 稼, 彭应宁, 夏香根, 等. 空时频检测前聚焦雷达信号处理方法[J]. 雷达学报, 2014, 3(2): 129-141.
[3] 王 杰, 金秋春, 马鹏阁, 等. 基于消光比的机载多脉冲激光雷达性能综合测试系统研制[J]. 计算机测量与控制, 2014, 22(3): 778-780.
[4] 张增继. 基于 ARM 嵌入式系统在雷达接口控制与数据采集系统中的应用[J]. 信息通信, 2015 (2): 19-20.
[5] 刘立人. 自干涉合成孔径激光三维成像雷达原理[J]. 光学学报, 2014 (5): 253-260.
[6] 车 俐, 白云浩, 蒋留兵. 小型高精度防撞雷达信号处理系统实现[J]. 现代雷达, 2016, 38(7): 32-35.
[7] 胡霄楠, 史忠科. BP 神经网络在雷达故障诊断中的应用研究[J]. 计算机测量与控制, 2006, 14 (12):1660-1662.
[8] 许志宏, 卢旻昊, 陈 列. 基于专家系统的雷达故障诊断软件研究[J]. 现代雷达, 2009 (5): 25-29.
[9] 姜来春. 故障树分析方法在脉冲雷达故障检测中的应用[J]. 电子设计工程, 2013, 21(3): 27-29.
[10] 张 捷, 薄煜明, 吕 明. 基于神经网络预测的网络控制系统故障检测[J]. 南京理工大学报 (自然科学版), 2010, 34(1): 19-23.
[11] 李东海. 基于专家系统的雷达识别方法[J]. 舰船电子对抗, 2014, 37(5): 10-13.
[12] 刘发金. 基于神经网络的卫星故障诊断专家系统及其应用[D]. 哈尔滨:哈尔滨工业大学, 2006.
[13] 涂望明,宋执环,孟庆志,等.小波神经网络在雷达故障诊断中的应用研究[J]. 计算机测量与控制, 2012, 20 (4):921-923.
