温枪弹道中光电靶灵敏度控制系统优化设计
2018-04-25,
,
(1.西安工业大学 光电工程学院,西安 710021; 2.陕西省光电测试与仪器技术重点实验,西安 710021)
0 引言
光电子技术的快速发展,为器件应用与测试仪器的研发奠定了基础[1]。光电靶是测试仪器中最具有代表性的一种,以光学系统形成靶面和器件构成具有非接触型的测速装置,其工作原理是以光电传感器相应电靶内部光通量的变化,将其转变为相对微弱的光电信号,经过电路优化设计后,将放大的信号作为输入电压值,进行幅值测试,为后续仪器提供脉冲[2]。在温枪弹道中,由于弹道高度不同,加之实验的不可重复性,导致人们对仪器灵敏度和稳定性要求极高,同时,实验环境改变和测试都具有危险性,因此需时时刻刻对设备进行监控[3]。由于光电靶与其他仪器一样,控制灵敏度与稳定性之间存在矛盾,并容易受到炮口火光和激波等干扰因素的影响,容易出现电压过饱和现象,经常导致仪器出现假动作或错误动作[4]。使用传统控制系统存在灵敏度控制效果差、性能不稳定等问题,无法满足高效控制标准[5]。
针对上述存在问题以及带来影响,对温枪弹道中光电靶灵敏度控制系统进行优化。根据实际条件和实际干扰元素进行优化设计,并对系统设计原理框图,同时,单片机还要根据光电靶灵敏度和噪声幅度值设置比较器阐值电压。针对系统硬件优化设计,需要实现的是将光信号转换为微弱电流信号,之后再对微弱电流信号进行转换,转换为mv级的电压信号,之后再设计相应的放大电路实现可调程控增益。在开发环境下进行软件部分设计,并通过实验结果可知,该系统设计具有合理性。
1 系统结构及原理
在温枪弹道中,并不是所有弹道都要求光电靶探测灵敏度越强越好。通常情况下,在火炮炮口进行初始化运作时,弹丸是比较大的,且弹道较低,如果光电靶灵敏度控制较差,那么从温枪弹道射出的弹丸信号就会出现饱和现象,且在炮口处会受到火光和激波的干扰,使光电靶出现误发射现象,影响系统的优化[6]。为此,需在满足条件的情况下,降低温枪弹道中光电靶对火光和激波干扰的灵敏性,实现高校灵敏度控制。
基于此,在控制系统中设计高灵敏度和低灵敏度两种工作模式,以便根据实际条件和实际干扰元素进行优化设计,系统设计的原理如图1所示。
图1 系统原理图
由图1可知:当温枪弹道中的弹丸信号穿过光电靶面时,经过两级方法,对信号电路进行调理,会将模拟信号转变成数字信号,为后续仪器提供脉冲输出条件。为了降低系统在电路中出现的噪音,在对目标信号传输时,进入后级放大电路,并在前级加入程序控制过滤器以降级噪音干扰。滤波参数是由单片机决定的,经过缓慢存储写入系统中。
针对系统硬件部分的优化设计,采用模糊控制方法对电路进行设计,控制信号主要取决于温枪弹道的背景亮度与噪声干扰情况。背景亮度和噪声干扰经过A/D转换后,利用AD对数据进行采集,并输入单片机,此时单片机根据选择的灵敏度按照相应控制规则进行计算,并输出,此时的输出电压值是控制整个系统电路的电压信号[7]。同时,单片机还要根据光电靶灵敏度和噪声幅度值设置比较器阐值电压。针对系统软件部分的优化设计,需充分利用硬件电路中对温枪弹道弹丸模拟信号进行方法,同时尽量降低比较器的阐值电压值,编写软件程序,促使系统设计的噪声幅度值为原来的1.2倍[6]。在能够满足系统要求的同时,以光电靶稳定性为主要参考因素,改变电路中的控制规则,使噪声幅度值降为原来的1.5倍,方便后续对灵敏度控制设计。
2 硬件设计
针对系统硬件优化设计,需从温枪弹道中光电靶灵敏度控制角度出发,第一步需要实现的是将光信号转换为微弱电流信号,之后再对微弱电流信号进行转换,转换为mv级的电压信号,之后再设计相应的放大电路实现可调程控增益。
2.1 光电靶灵敏控制器设计
光电靶灵敏控制器主要是由光点二极管、三极管和PIN型号的光电二极管组成。所研究的光电靶,其弹丸口径约为3.5~150 mm,速度在10~2000 m/s,射频在1000发/min以下,坐标精确度为±2.5 mm,靶面大小分为1 m×1 m到5 m×5 m不等。光电靶控制系统中的光电探测器选用的是GD3271Z十六元阵列探测器。其中包含十六个光敏二极管,边长为2.5 mm,探测面积为2.5×16 mm2,探测器总长为43 mm。给出光电靶灵敏控制器硬件结构如图2所示。

图2 光电靶灵敏控制器
由图2可知:光电二极管是基于p-n结的光电效应运转的,并在反偏光模式下设置光伏工作强度。在无光照工作情况下,会出现载流子的渡越时间和结点容较小现象发生,并且具有较宽线性输出和较高的响应频率,选择适用的高频率调至光源信号,在二极管内进行控制设计。由于二极管内空间电荷区域较宽,势垒过大,导致流过的p-n结电流较小,容易形成暗流。此时的二极管被光照射时,会产生光生电流,光生电流会比无光照射时产生的电流大的多,并且光照强度较大,在同样条件下所产生的载流越多说明电流就越大[8]。PIN型号的二极管又被称为快速光电二极管,工作原理与普通二极管原理一致,都是基于p-n结光电工作原理进行的。在p型半导体与n型半导体之间掺杂了一层本征半导体,主要由高阻n型硅片组成,在它两面都具有抛光属性,同时使用欧姆接触PIN型号光电二极管在两面掺杂杂质进行扩散。在反偏光状态下,可承受较高电压,这就促使灵敏控制器具有较宽输出范围,且PIN型号光电二极管响应速度快、灵敏度高。
2.2 光电转换电路设计
如果直接对信号进行测量,那么会存在信噪比和信号传递较难的问题,为此在信号输出级中,选择跨阻值较大的放大器对温枪弹道中射出信号进行转换与放大。由于放大器本身是具有电阻量纲属性的,为此将跨足放大器作输入信号值作为电路的输入电流值,将输出信号值作为电路的输出电压值,具有信号强、失真小、噪声低、倍数放大等优点[9]。选择型号为OPA380的跨阻值放大器,可适用90 Mhz的宽带,并且信号是在15 kHz芯片自带的68nV噪声下传递的,电路传输电压不能超过6.0 V,并且满足输出级噪声电流转换成电压的要求,电路原理设计如图3所示。
图3 光电转换电路原理图
由图3可知: D1型号为LSSPD-PB3的光电二极管,将光强信号转化为电流信号输入OPA380的2号引脚;R1是控制电流转换成电压的放大倍数,一般选用10 K的电阻;C1作用为去耦电容,当高频噪声信号通过跨阻放大级时,高频噪声信号会通过C1直接通过放大器,防止放大器对噪声进行放大。
根据以上步骤,选用十六元阵列的光电探测器,PIN型号光电二极管设计光电靶灵敏度控制器,并采用OPA380跨阻值放大器,15 kHz芯片设计光电转换电路,将光信号转换为微弱电流信号,实现微弱电流信号的转换。二极管中光电信号响应速度快、灵敏度高,能够有效提升硬件的控制精度和控制速率,由此完成了温枪弹道中光电靶灵敏度控制系统的硬件设计。
3 软件设计
系统软件部分的优化设计是在一种程序开发环境下进行的,运行程序类似于BASIC运行环境,但是系统软件部分程序语言设计与其他计算机程序语言是有显著区别的,其他计算机程序语言采用的是基于文本语言而产生相关代码,而系统软件使用的是图形化的语言编辑程序,因此产生的程序也是具有框图形式的。温枪弹道中光电靶灵敏度控制系统软件优化是NI平台设计的核心部分,也是优化环境或者控制系统的理想选择形式[10]。因此,选择基于优化环境下的软件程序开发板来实现软件编程。软件编程的基本流程如下所示:
1)获取失真波形,采用A/D转换器对数据进行采集,同时利用计数器开始计算采集时间;
2)将AD采集的信号还原成未处理的信号;
3)经过计算,可得出采样个点的斜率;
4)比较采样点斜率大小,找出斜率最大且时间最小点;
5)将斜率最大且时间最小点斜率计算出来,并输出;
6)输入斜率对应横坐标值,获取理论波形;
7)输出理论波形纵坐标值;
8)计算此时理论波形对应的斜率;
9)利用输出值与失真波形对应电压增益值和对应点斜率,计算出理论波形所对应的电压增益方法倍数;
10)计算电压放大倍数所对应的增益控制端电压值,并在DA输出控制端输出此时的电压值。
给出控制系统软件设计流程如图4所示。

图4 控制系统软件涉及流程图
对于弹形波形斩波失真度研究,提出利用失真波形拐点处斜率值和理论波形对应该点处的斜率值关系,来实现电路电压增益的调节。首先通过简单数学推导来得出弹形波形斩波失真度算法。假设电路中未经放大的原始信号如图4(a)所示,将原始信号放大n倍后失真波形如图4(b)所示,拐点坐标为(t0,V0):

图4 信号失真波形
由图4可得,失真点对应的拐点坐标是(t0,V0)。假设将图(a)中t0对应的电压值放大2倍,即为V1,此时对应图(b)中拐点坐标是(t0,V1),原始信号对应t0的电压值是v原。则此时,v1=2v原,v0=nv原,失真波形拐点处对应斜率值是:k失=v0/t0,放大倍数为n;放大两倍时对应拐点处斜率值是:k2=v1/t0,放大倍数为2,由此可获得结论斜率之比即放大倍数之比,如公式(1)所示:
(1)
由公式(1)可得出:当进行靶场实验时,第一发温枪弹电路的增益是已知的,失真波形拐点处的斜率已知,理论波形对应拐点处的斜率已知,通过上述推导可以得出理论波形对应的增益值,从而可以得出电压增益电路需要调整的增益,达到减小测试误差目的。
选择STM32F407ZGT6型号芯片,该芯片主要有以下几个特点:最多可测量23个通道,由21个外部通道源和2个内部信号源组成;单个芯片最大采样率为1 MHz,支持单次、连续、扫描或者间断交替方式;12位逐次逼近型数模转换器[11]。软件程序设计是要求斜率值尽量精确,使系统设计结果更加具有合理性,但是经过AD采集到的数据是一系列离散的数字点,无法满足该要求,为此,需对经过处理的数据进行还原。设计电路时,由于需要相应的匹配,因此对AD603输出失真波形进行了同等比例缩小,可先将AD采集到的数据进行还原,经过还原后的失真波形对应原始波形进行电压值测定。计算失真波形拐点为斜率最大值点,并对每一个采样点斜率计算,将他们存入到一个数组里面,在数组中求得对应斜率最大值点,之后找出斜率最大值点对应横坐标,生成波形,求得理论波形对应拐点处斜率值。给定失真波形放大倍数,根据前面推导关系式,得到理论波形对应的放大倍数,以此为基础计算对应程控放大电路控制端电压值。由于输入两个波形是相同的,输出的失真波形倍数与理论波形应该也是相同的,根据计算器计算,与输出程序一致,那么可说明程序编写正确,完成软件部分设计。
4 实验结果与分析
为了验证温枪弹道中光电靶灵敏度控制系统优化设计的合理性,进行了如下实验。设置主要参数如表1所示。

表1 参数设置
4.1 结果分析
按照温枪弹道中发射出的弹丸信号属性,进行相应光电靶灵敏度控制系统设计后,利用信号发射所提供的电压和频率正弦信号,对系统性能进行验证。不同频率下光电靶灵敏度变化特性如表2所示。

表2 不同频率下光电靶灵敏度变化幅值
根据表2不同频率下光电靶灵敏度变化幅值可知,在1~4 kHz范围内,波形并没有出现较大幅度变化;但是从5 kHz开始,灵敏度幅值逐渐下降,最低达到了0.25 V,衰减了75%。为了控制幅值处于稳定状态,设计了上述系统,将改进系统与传统控制系统进行对比,提高实验结果可靠性,如图5所示。
图5 两种系统控制性能对比结果
由图5可知:采用传统系统对温枪弹道中光电靶灵敏度进行控制时,无法有效控制光电靶灵敏度,呈逐渐下降趋势。当实验时间为1 s时,是幅值最高值2.25 V,当实验时间为3.5 s到5 s时,幅值保持恒定为1.50 V,当实验时间为5 s时,幅值再次下降,最终降至0.25 V;改进系统对温枪弹道中光电靶灵敏度进行控制,整体呈下降趋势。当实验时间为1 s时,是幅值最高值2.25 V,当实验时间为2 s到5 s时,幅值保持恒定为2.00 V,当实验时间为5 s到7 s时,幅值大幅度下降,最终降至1.00 V,从7 s开始,幅值保持恒定值为1.00 V。对比传统系统和改进系统的幅值,改进系统随着灵敏度频率发生变化,逐渐稳定在一定数值范围内,可以有效控制光电靶灵敏度。
应用传统控制系统,固定比较器电压值,不同光照条件下,测量弹丸在温枪弹道下信号幅值和噪声幅值,收集的实验数据如表3所示。
表3 传统控制条件下灵敏度幅值
在较低灵敏度条件下,采用改进设计的系统控制后,弹丸在温枪弹道下,不同亮度的灵敏度幅值如表4所示。
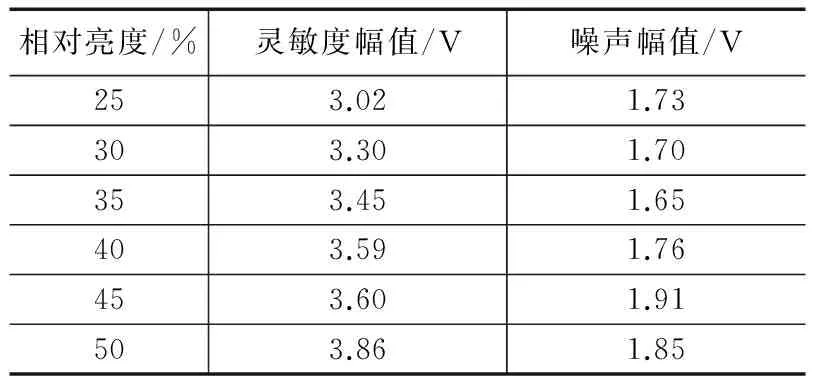
表4 改进系统控制条件下灵敏度幅值
由表3、表4可得,传统控制系统灵敏度幅值、噪声幅值随着相对亮度的增加,大幅度上升,灵敏度幅值最大值达到了3.39 V,噪声幅值最大达到2.05 V,且相对亮度每增加5%,灵敏度幅值平均上升0.5 V,噪声幅值平均上升0.4 V。改进控制系统灵敏度幅值、噪声幅值随着相对亮度的增加,基本保持稳定状态。灵敏度幅值的平均值约为3.50 V,噪声幅值约为1.70 V。对比传统控制系统和改进控制系统的实验结果,采用改进设计的系统控制后,对电路进行了增益,根据当前亮度来改变放大倍数,使光电靶范围扩大。在同种弹丸,相同弹道高度的情况下,使脉冲输出更加稳定。
4.2 实验结论
根据实验内容,可得出实验结论:采用传统系统对温枪弹道中光电靶灵敏度进行控制时,无法有效控制光电靶灵敏度,光电靶的灵敏度呈逐渐下降趋势,即使固定了比较器电压值,灵敏度也不受控制;而改进系统随着灵敏度频率发生变化,逐渐稳定在一定数值范围内,可以有效控制光电靶灵敏度,并在较低灵敏度条件下,脉冲输出更为稳定。由此可知,优化设计的系统控制效果更好,稳定性更强。
5 结束语
根据上述内容,电路设计完成功能模块的设计与仿真,在搭建初期,利用基础万能板对理论电路进行初步验证,而程序优化设计则是利用万能板搭建基础电路,并进行基础调试,在输入信号源上采用mv级电压信号,并在不同信号频率下,对系统性能进行验证。
通过上述实验验证结果可知,改进系统的设计是合理的,采用传统系统对温枪弹道中光电靶灵敏度进行控制,无法有效控制光电靶灵敏度,且稳定性较差;而改进系统随着灵敏度频率的变化,能够有效控制光电靶的灵敏度,并在较低灵敏度条件下,使脉冲输出更为稳定。改进系统不但提高了对光电靶灵敏度的控制能力,同时也大大增强了系统的稳定性,实现了对温枪弹道中光电靶灵敏度高效、稳定控制的目的。
参考文献:
[1] 田 会, 倪晋平, 焦明星. 抛物线弹道弹丸飞行参数测量模型与精度分析[J]. 仪器仪表学报, 2016, 37(1):67-74.
[2] 张恩东, 李 焱, 张玉东,等. 速度前馈补偿的舰载光电设备伺服系统的设计[J]. 电光与控制, 2016, 25(7):59-63.
[3] 何凯平, 徐 达, 熊 伟,等. 激光靶海量通道信号模块化并行采集系统设计[J]. 激光技术, 2016, 40(6):810-813.
[4] 翟长远, 杨 硕, 张 波,等. 支持故障报警的果园对靶变量排肥系统[J]. 农业机械学报, 2015, 46(10):16-23.
[5] 田 会, 魏 鑫. 光幕靶探测灵敏度与响应时间测量方法[J]. 工具技术, 2017, 51(9):128-131.
[6] 周俊鹏, 李 焱, 年 轮,等. 舰载光电伺服设备的设计[J]. 电光与控制, 2015, 25 (12):88-92.
[7] 田 会, 魏 鑫. 光幕靶探测灵敏度与响应时间测量方法[J]. 工具技术, 2017, 30 (9):128-131.
[8] 巩稼民, 郭 涛, 孙宇航,等. 一种新型红外靶标的设计[J]. 半导体光电, 2015, 36(5):804-807.
[9] 薛莹洁, 陈海峰. 磁控溅射镀膜中钛靶冷却系统的仿真与优化[J]. 钛工业进展, 2017, 34(2):38-44.
[10] 陈 瑞, 倪晋平. 基于正交试验的光电立靶光幕阵列结构参数优化方法[J]. 兵工学报, 2017, 30 (11):28-34.
[11] 黄 雷, 张晓发, 袁乃昌. S波段宽带低噪声放大器的设计[J]. 电子设计工程, 2017, 25(15):158-161.
