跪式起落架直升机地面平衡特性分析
2018-04-25宋山松刘湘一
宋山松,刘湘一,李 崇
(1.海军航空大学,山东烟台264001;2.中国直升机设计研究所,江西景德镇333001)
跪式起落架是一种广泛应用于武装直升机及多用途直升机的先进起落架结构形式。在地面载荷作用下,跪式起落架会呈现“下跪”姿态,以最大程度吸收能量。
跪式起落架设计主要是为了满足直升机的耐撞性(Crashworthiness)要求[1]。美军20世纪70年代提出将“耐撞性”作为军用攻击直升机抗坠毁设计的性能指标[2-3],并为此制定了直升机生存率设计指南和相应的结构抗坠毁设计规范[4-6],开始了对跪式起落架的相关研究。国内对跪式起落架的研究开始于20世纪末,主要集中在对其抗坠毁性能的研究上。杨嘉陵,吴卫华[7-10]等人建立了跪式起落架直升机主起落架和全机简化的弹簧-刚性杆系统模型,重点分析了跪式起落架直升机以某一速度坠落过程中的能量吸收特性,所建立的跪式起落架模型简化程度较高且没有考虑缓冲支柱力及轮胎压缩力的非线性特性。陈志富[11]建立了具有可收放抗坠毁起落架的直升机全机力学模型和起落架力学模型,全机力学模型中忽略了直升机降落过程中重心纵向位移及机轮纵向轮距的变化。韩国玺[12]建立了某型武装直升机的全机动力学模型及跪式主起落架模型,并运用ADAMS软件进行了全机的落震仿真分析。黄仕超[13]从机轮、缓冲器、连接机构这3个组成部分研究了适用于舰载机的耐坠毁跪式起落架,没有考虑尾起落架在直升机下降过程中的纵向运动,模型相对简化。程金送[14]推导了跪式起落架纵向及垂向力和位移的传递系数,对不同载荷下的地面平衡状态进行了初步的计算分析。
目前,国内对跪式起落架直升机地面平衡特性的研究还比较少,现有研究中建立的跪式起落架直升机动力学模型简化程度较高。本文对跪式起落架特殊的结构形式进行分析,建立了跪式起落架的非线性动力学模型,运用相关的直升机平衡分析理论,对跪式起落架直升机地面平衡状态进行计算分析,获得不同载重状态和不同拉力系数下跪式起落架运动规律。计算获得不同载重状态及拉力系数下的缓冲支柱压缩量、机轮压缩量等参数,对进一步计算跪式起落架直升机机体模态特性和“地面共振”分析具有十分重要的意义。
1 坐标系的建立
采用某型跪式起落架直升机试验测得悬空状态下不同载重状态的重心坐标、跪式起落架各点坐标等数据建立如下坐标系。
坐标系xoozo以重心O为坐标原点,以机体纵轴由重心指向垂尾的方向为xo轴正向,机体纵向对称面内垂直于xo轴向上为zo轴正向。在坐标系xoozo下,主、尾机轮最低点连线与xo轴之间存在夹角λ,将坐标系xoozo逆时针转过λ角即可得到地面坐标系xgozg;在地面坐标系xgozg下,跪式起落架直升机地面平衡时机体将绕重心转过φ角,得到平衡状态下的机体坐标系xbobzb。
建立的各坐标系关系如图1所示。图1中,γ表示在坐标系xooozo下的桨轴前倾角。
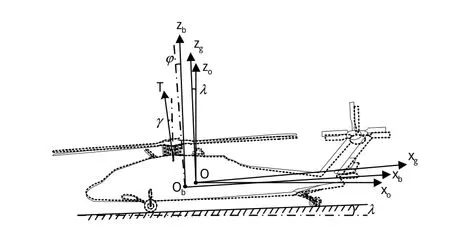
图1 坐标系关系图Fig.1 Coordinate diagram
各坐标系之间的坐标转换矩阵如下:

2 地面坐标系下全机纵向平衡方程
基于直升机停机状态下的一般情况做出如下合理假设:
1)地面停机状态下,主机轮处于刹车状态,尾机轮处于自由状态,不考虑尾机轮摩擦力;
2)直升机机体为刚体,不考虑机身及起落架摇臂等部位的弹性变形;
3)旋翼拉力在任意拉力系数下为定常值,不考虑环境因素等对旋翼拉力的扰动影响。
地面坐标系xgozg下,跪式起落架直升机纵向平衡状态受力分析图如图2所示。图中,T表示旋翼拉力,G表示重力,Fm、Fn分别表示主机轮和尾机轮受到的地面支持力,fm表示主机轮摩擦力。

图2 直升机纵向平衡状态受力分析图Fig.2 Force analysis of helicopter longitudinal blance
跪式起落架直升机全机纵向平衡分析与支柱式起落架直升机最主要的区别在于跪式起落架直升机在地面载荷作用下,机体重心不仅要向下移动,还要向前移动,呈现一种“下跪”姿态,并且在载荷的作用下纵向轮距会发生变化,地面载荷在主、尾起落架的分配也随之变化。因此,对跪式起落架直升机全机纵向平衡分析更为复杂。对全机纵向平衡状态进行受力分析,建立跪式起落架直升机全机纵向平衡方程:

式(1)中:Fm、Fn分别表示主机轮和尾机轮受到的地面支持力;fm表示主机轮摩擦力;( )γ+λ+φ表示在地面固定坐标系下旋翼拉力与zg轴之间的夹角;xh表示旋翼拉力作用点到重心的x向距离;zh表示旋翼拉力作用点到重心的x向距离。
重心到主、尾机轮地面接触点纵向距离及重心到地面的垂向距离可以表示为:

式(2)中:表示主机轮地面接触点的x坐标;表示主机轮地面接触点的z坐标;xW2表示尾机轮地面接触点的x坐标;x表示重心向前移动距离;z表示重心向下移动距离。
建立的跪式起落架直升机全机纵向平衡方程中含有x、z、φ、fm、Fm、Fn6个未知量,而平衡方程只有3个,因而需要单独对跪式起落架进行力和运动的分析以找出未知量之间的关系。
3 跪式起落架模型的建立
3.1 主起落架分析
主起落架受力情况如图3所示。图3中,A、B2点为机身上起落架的固定点,由于假设机体为刚体,故其相对位置关系不随起落架的运动而改变。初始状态下,主起落架缓冲支柱处于自然伸长状态,即B0C0为主缓冲支柱未受到压缩的长度。平衡状态下,主机轮及主缓冲支柱受到压缩,同时,摇臂AC绕机体上的固定点A转动。经坐标转换可以求得平衡状态下A、B2点的坐标:

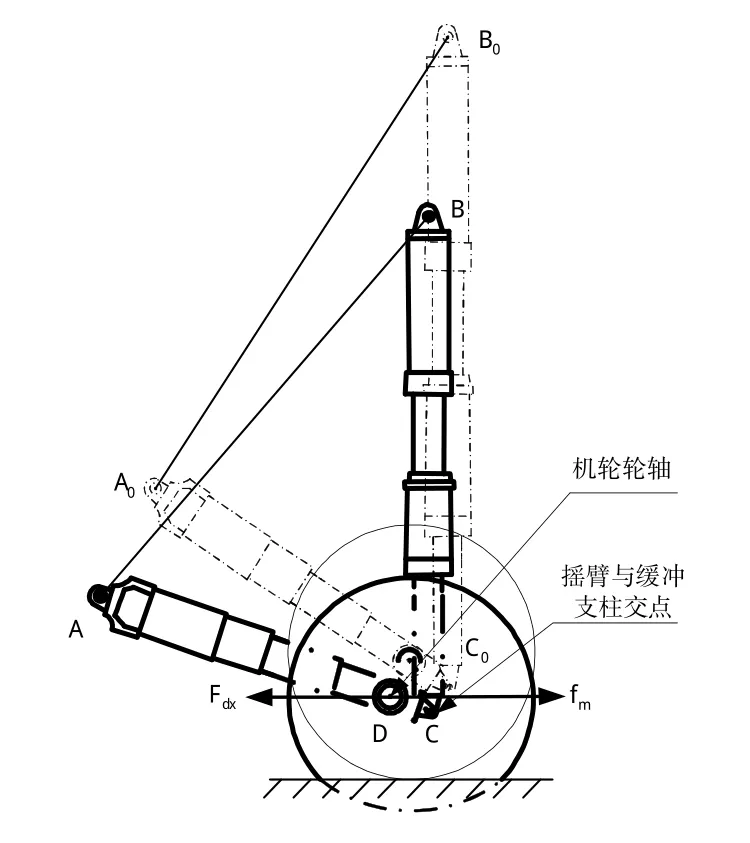
图3 主起落架受力分析图Fig.3 Force analysis of main landing gear
主起落架摇臂受力情况如图4所示。图中:Fax、Faz分别表示A点所受x、z方向的力;Fdx、Fdz分别表示D点所受x、z方向的力;Fmh表示主缓冲支柱静压缩力。
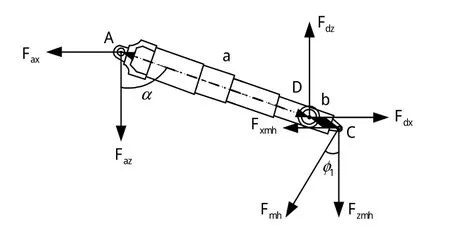
图4 主起落架摇臂受力分析图Fig.4 Force analysis of main landing gear rocker
主起落架分析时引入α角,表示平衡时主起落架摇臂与地面固定坐标系zg轴之间的夹角。由A点坐标可以得到平衡后C、D2点坐标。
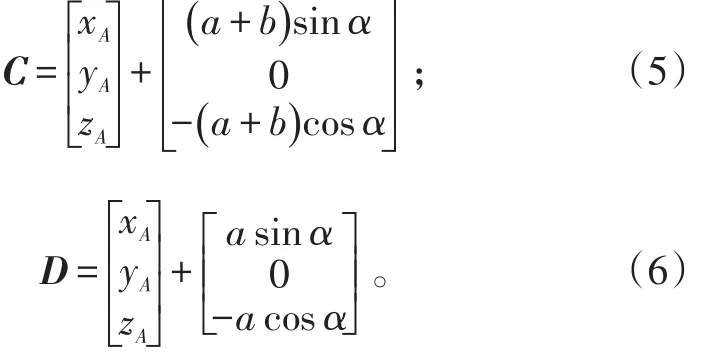
由此可得主缓冲支柱压缩量为:

由主缓冲支柱静压缩实验数据插值可得主缓冲支柱静压缩力:

对摇臂A点列力矩平衡公式:

主机轮受力情况如图5所示。
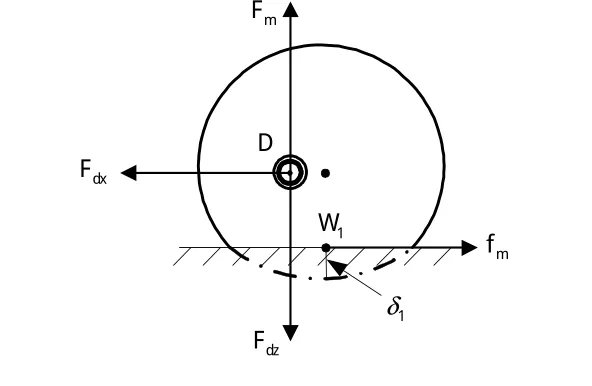
图5 主机轮受力分析图Fig.5 Force analysis of main wheel
分析可知,主机轮摩擦力等于轮胎纵向变形产生的弹性力。

主机轮压缩量:

由主机轮静压缩实验数据插值可得主机轮静压缩力:

3.2 尾起落架分析
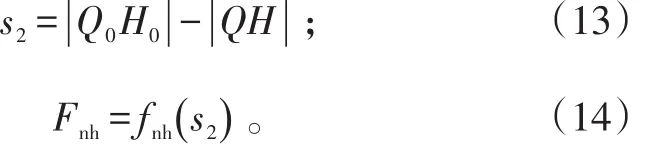
尾起落架及尾起落架摇臂受力情况见图6所示。与主起落架分析原理类似,可以求得平衡状态下的P、Q、H、J点的坐标。进而可以求得尾缓冲支柱的压缩量和静压缩力:
对P点列力矩平衡公式:

尾机轮受力情况如图7所示。
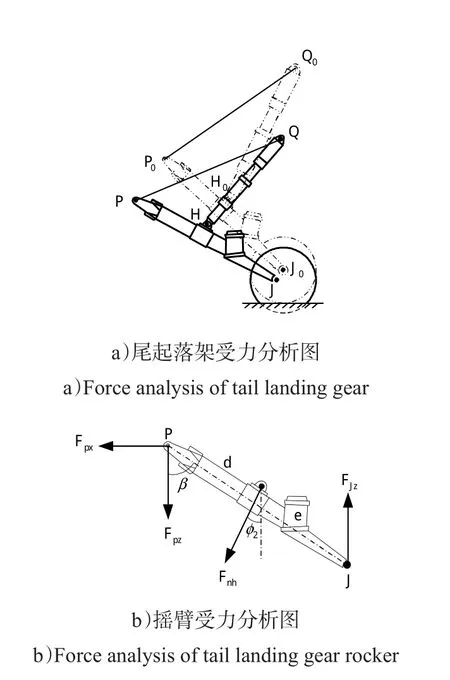
图6 尾起落架及摇臂受力分析图Fig.6 Force analysis of tail landing gear and rocker
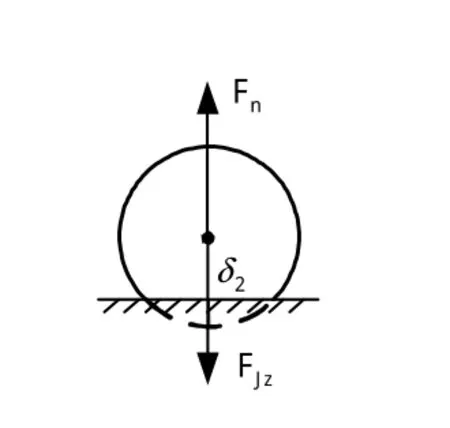
图7 尾机轮受力分析图Fig.7 Force analysis of tail wheel
尾机轮压缩量:

由尾机轮静压缩实验数据插值可得主机轮静压缩力:

4 模型的求解与分析
4.1 模型的求解
联立式(1)、(2)、(9)、(15)可以得到跪式起落架直升机地面平衡分析模型。分析可知,模型为包含5个未知量(x、z、φ、α、β)的非线性方程组。对于非线性方程组的求解,国内外学者发展了很多数值求解算法,包括牛顿法、拟牛顿法以及各类智能优化算法等[15-18]。本文通过比较,选择直接调用Matlab中非线性方程组求解命令Fsolve进行求解,求解过程快捷高效且收敛性较好。
根据上述计算方法和某型跪式起落架直升机的相关数据,分别计算重载、中等载荷和轻载3种载荷状态下,拉力系数(T/G)从0到0.8的平衡状态。
4.2 计算结果及分析
某型跪式起落架直升机地面平衡状态计算得到的主机轮压缩量及静压缩力随拉力系数的变化曲线如图8、9所示。
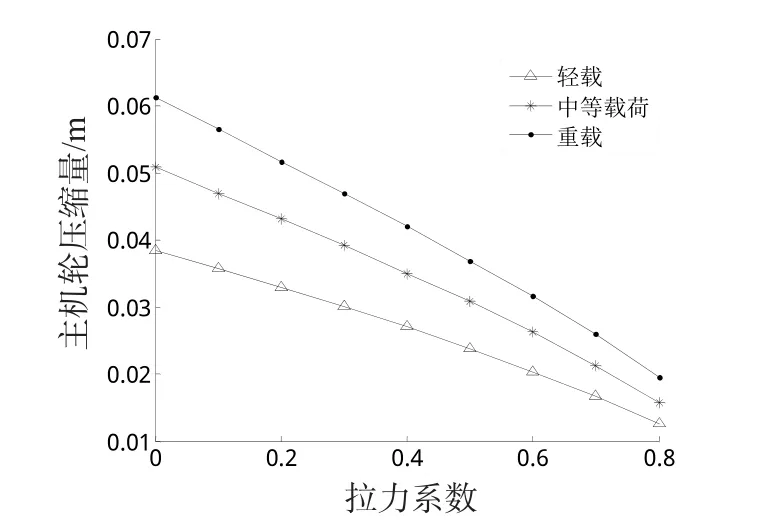
图8 主机轮压缩量随拉力系数变化曲线Fig.8 Main wheel compresses vs rotor thrust coefficient

图9 主机轮静压缩力随拉力系数变化曲线Fig.9 Main wheel compression force vs rotor thrust coefficient
由图8、9可以看出,直升机载重量一定时,随旋翼拉力系数增大,主机轮的压缩量、静压缩力减小;在同一拉力系数下,直升机载重量增加,主机轮压缩量、静压缩力随之增加。
尾机轮压缩量及静压缩力随拉力系数的变化曲线如图10、11所示。
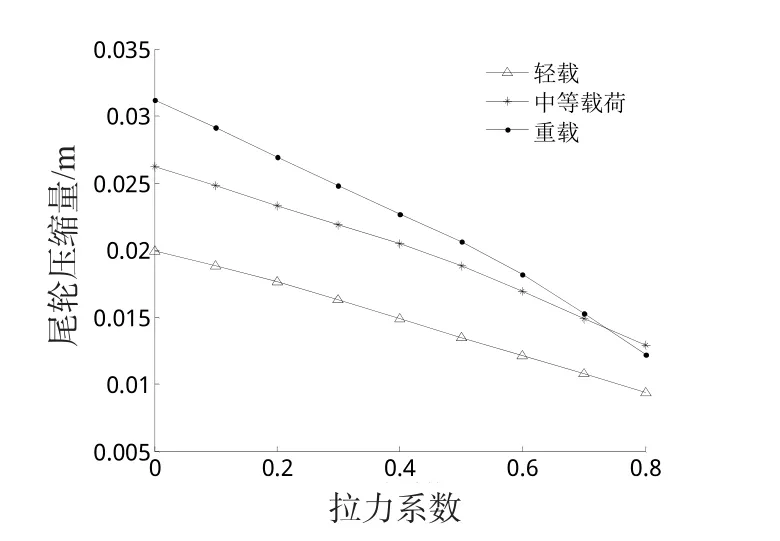
图10 尾机轮压缩量随拉力系数变化曲线Fig.10 Tail wheel compresses vs rotor thrust coefficient

图11 尾轮静压缩力随拉力系数变化曲线Fig.11 Tail wheel compression force vs rotor thrust coefficient
由图10、11可以看出,在拉力系数小于0.7之前,同一拉力系数下尾机轮压缩量、静压缩力随载重量的变化趋势同主机轮基本一致;当拉力系数大于0.7时,直升机在中等载荷下尾机轮的压缩量和静压缩力反而大于重载下的压缩量和静压缩力。这主要是由直升机在不同载重状态下的重心位置不同所造成的,中等载荷时直升机x向的坐标为8.493,重载时直升机x向的坐标8.327,说明在中等载荷下重心位置更靠后,旋翼拉力作用点到重心的力臂更长,当直升机拉力系数大于0.7时,中等载荷下的俯仰力矩超过了重载时的俯仰力矩,因此尾机轮压缩量反而更大。
主缓冲支柱压缩量及静压缩力随拉力系数的变化曲线见图12、13,主缓冲支柱静压缩曲线见图14。
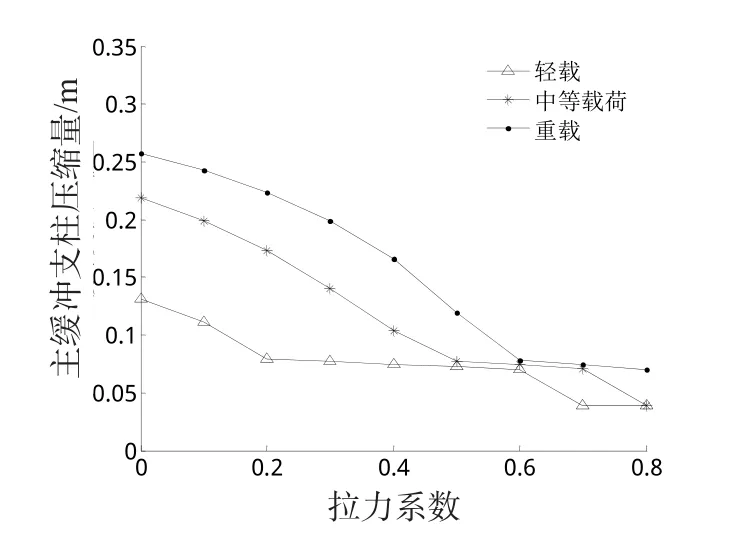
图12 主缓冲支柱压缩量随拉力系数变化曲线Fig.12 Main buffer compresses vs rotor thrust coefficient

图13 主缓冲支柱静压缩力随拉力系数变化曲线Fig.13 Main buffer compression force vs rotor thrust coefficient
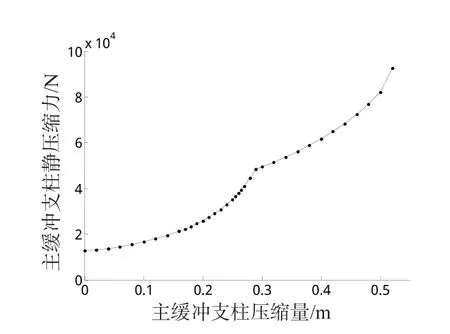
图14 主缓冲支柱静压缩曲线Fig.14 Main buffer static compression curve
由图12、13可以看出,直升机在载荷一定下主缓冲支柱压缩力随旋翼拉力系数的增大而减小;旋翼拉力系数一定时,直升机载重量越大,主缓冲支柱压缩力越大。
主缓冲支柱压缩量随旋翼拉力系数的变化趋势与其压缩力随拉力系数的变化趋势接近,但当主缓冲支柱的压缩量小于0.1 m时,压缩量随拉力系数的变化趋于平缓,这主要由主缓冲支柱静压缩特性的非线性所引起的。由图14可以看出,主缓冲支柱静压缩曲线存在很强的非线性特性,当主缓冲支柱压缩量小于0.1 m时,随静压缩力的减小,缓冲支柱压缩量变化很平缓。
尾缓冲支柱压缩量及静压缩力随拉力系数的变化曲线如图15、16所示
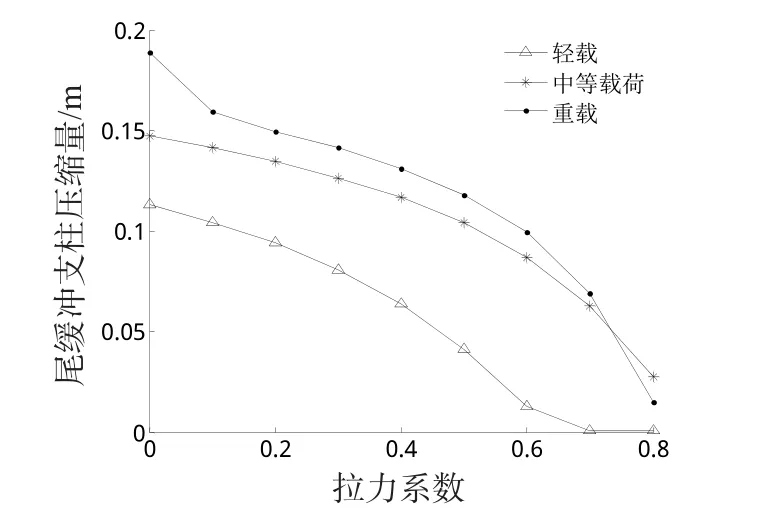
图15 尾缓冲支柱压缩量随拉力系数变化曲线Fig.15 Tail buffer compresses vs rotor thrust coefficient

图16 尾缓冲支柱静压缩力随拉力系数变化曲线Fig.16 Tail buffer compression force vs rotor thrust coefficient
由图15、16可以看出,尾缓冲支柱压缩量及静压缩力变化趋势与尾机轮压缩量及压缩力的变化趋势接近,当旋翼拉力系数大于0.7时,也出现中等载荷下尾缓冲支柱压缩量及压缩力大于重载下的压缩量和压缩力的情况,其原因也是由于中等载荷下重心位置更靠后,中等载荷下的俯仰力矩超过了重载时的俯仰力矩所引起的。
对比图12、13、15、16可以发现,主、尾缓冲支柱的静压缩力与拉力系数之间基本呈线性变化,而压缩量与拉力系数呈非线性变化,且主缓冲支柱压缩量与拉力系数之间的非线性程度更高。这主要是因为旋翼拉力线性变化过程中,主、尾缓冲支柱的静压缩力要与之平衡,因而静压缩力基本呈线性变化。由于主缓冲支柱静压缩曲线的非线性程度更高,因而其静压缩量随拉力的非线性程度也更高。
主、尾机轮地面接触点到重心距离随拉力系数的变化规律如图17、18所示。

图17 主轮接触点到重心距离随拉力系数变化曲线Fig.17 Distance from the main wheel to the center of gravity vs rotor thrust coefficient
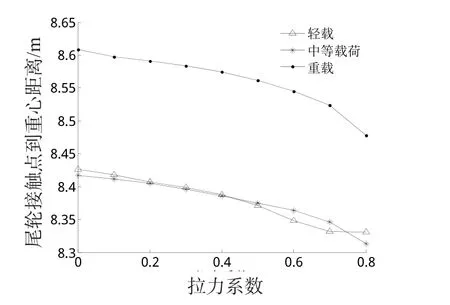
图18 尾轮接触点到重心距离随拉力系数变化曲线Fig.18 Distance from the tail wheel to the center of gravity vs rotor thrust coefficient
图17、18分别表示了主、尾机轮地面接触点到重心距离随拉力系数的变化规律,反映了跪式起落架直升机重心随载重量和旋翼拉力变化的运动特性。停机状态下,直升机载重量越大重心前移量越大,主机轮地面接触点到重心距离越近,同时,尾机轮地面接触点在直升机压力作用下向后移动的距离越大,尾机轮地面接触点到重心距离越远,因此直升机呈现“下跪”姿态。
当旋翼拉力系数增大时,相当于直升机载荷和作用在起落架上的力减小,重心后移,尾机轮向前移动。因此,主机轮地面接触点到重心距离不断增大,尾机轮地面接触点到重心距离不断减小。图17可以看出主轮接触点到重心的距离随拉力系数呈非线性变化,这反映了跪式起落架运动过程中存在很强的非线性特性,其运动受到重心运动、机体绕重心转动、桨盘倾斜角变化等多种非线性因素耦合影响。
5 结论
本文分析了跪式起落架的结构特点,建立了跪式起落架分析模型和全机的纵向平衡分析模型,模型考虑了跪式起落架缓冲支柱和轮胎的非线性特性,通过仿真分析得到了以下结论:
1)一般情况下,相同拉力系数下,直升机载重越大,主、尾机轮的压缩量和静压缩力越大;同一载重下,拉力系数越大,主、尾缓冲支柱的压缩量和静压缩力越小。
2)当拉力系数达到一定值时,由于不同载重状态下的重心位置不同,旋翼拉力的力矩不同,会使得轻载情况下的尾机轮静压缩力和尾缓冲支柱静压缩力反而会大于重载。
3)主、尾轮地面接触点到重心的距离会随着直升机载荷大小和拉力系数的变化而变化。一般情况下,直升机载重越大,拉力系数越小时,主机轮地面接触点到重心的距离越近,尾机轮地面接触点到重心的距离越远。
参考文献:
[1]DEHAVEN H.Beginnings of crash injury research[C]//Proceedings of the 13thstapp car crash conference.Detroit:Society ofAutomotive Engineering,1969:1-8.
[2]CARNELL B L.Crash survivability of the UH-60A helicopter:AGARG-CP-255[R].Neuilly-sur-Seine,France,1978:64-1,64-10.
[3]GORMONT RF,WOLFE RA.The U.S.army UTTAS andAAH programs[R].1977:1-11.
[4]TURNBOW J W,CARROL D F.Crash survival design guide:TR-71-22[R].1971:81-88.
[5]SHANAHAN D F,SHANAHAN M O.Kinematics of U.S.army helicopter crashes 1980-1985[J].Aviation Space and Environmental Medicine,1989,60(2):112-121.
[6]SHANAHAN D F,SHANAHAN M O.Injury in U.S.army helicopter crashes october 1979-september 1985[J].Journal of Trauma&Acute Care Surgery,1989,29(4):415-422.
[7]杨嘉陵,吴卫华.武装直升机抗坠毁设计研究[J].机械工程学报,2001,37(5):1-5.YANG JIALING,WU WEIHUA.Study on the armed helicopter crashworthiness design[J].Chinese Journal of Mechanical Engineering,2001,37(5):1-5.(in Chinese)
[8]杨嘉陵,吴卫华,刘旭红.直升机整体抗坠毁简化力学模型[J].机械工程学报,2003,39(12):109-113.YANG JIALING,WU WEIHUA,LIU XUHONG.Simplified mechanical model of helicopter crashworthiness design[J].Chinese Journal of Mechanical Engineering,2003,39(12):109-113.(in Chinese)
[9]杨嘉陵,吴卫华,赵岩,等.跪式起落架在武装直升机坠毁过程中能量吸收能力研究(Ⅰ)——数值仿真计算[J].航空学报,2002,23(1):23-27.YANG JIALING,WU WEIHUA,ZHAO YAN,et al.Energy absorbing capability of kneeling landing gear for new type armed helicopter crashworthiness during crash process(Ⅰ)——theoretical model analysis[J].Acta Aeronautica et Astronautica Sinca,2002,23(1):23-27.(in Chinese)
[10]杨嘉陵,吴卫华,赵岩,等.跪式起落架在武装直升机坠毁过程中能量吸收能力研究(Ⅱ)——理论分析模型方法[J].航空学报,2002,23(1):28-32.YANG JIALING,WU WEIHUA,ZHAO YAN,et al.Energy absorbing capability of kneeling landing gear for new type armed helicopter crashworthiness during crash process(Ⅱ):theoretical model analysis[J].Acta Aeronautica et Astronautica Sinca,2002,23(1):28-32.(in Chinese)
[11]陈志富.高性能直升机起落架动力学研究[D].南京:南京航空航天大学,2008.CHEN ZHIFU.Study on the advanced helicopter landing gear dynamics[D].Nanjing:Nanjing University of Aeronautics&Astionautics,2008.(in Chinese)
[12]韩国玺.直升机起落架构型分析与仿真试验[D].南京:南京航空航天大学,2008.HAN GUOXI.Configuration analysis and simulation of helicopter landing gear[D].Nanjing:Nanjing University ofAeronautics&Astionautics,2008.(in Chinese)
[13]黄仕超.舰载直升机起落架设计与仿真分析[D].哈尔滨:哈尔滨工程大学,2015.HUANG SHICHAO.The design and simulation analysis on landing gear of the shipboard helicopter[D].Harbin:Harbin Engineering University,2015.(in Chinese)
[14]程金送.某新型直升机“地面共振”初步分析[J].应用力学学报,2001,9(18):118-125.CHENG JINSONG.Preliminary analysis of ground resonance of a new type of helicopter[J].Chinese Journal of Applied Mechanics,2001,9(18):118-125.(in Chinese)
[15]ACHAR N S,GAONKAR G H.Helicopter trim analysis by shooting and finite methods with optimally damped newton iterations[J].AIAA Journal,1993,31(2):225-234.
[16]MCVICAR J S G,BRADLEYT R.Robust and efficient trimming algorithm for application to advanced mathematical models of rotorcraft[J].Journal of Aircraft,1995,32(2):439-442.
[17]CHEN F,OMRI R.A highly robust trim procedure for rotorcraft simulations[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit.Honolulu,Hawail:AIAA,2008.
[18]徐广,胡国才.一种新PSO混合算法在直升机配平中的应用[J].南京航空航天大学学报,2016,48(3):426-430.XU GUANG,HU GUOCAI.Application of new PSO hybrid algorithm to helicopter trim[J].Journal of Nanjing University of Aeronautics&Astionautics,2016,48(3):426-430.(in Chinese)
