基于星载视频SAR的海上运动目标监视方法
2018-04-25王亚敏
王亚敏,杨 威,陈 杰
(北京航空航天大学电子信息工程学院,北京100191)
合成孔径雷达(Synthetic Aperture Radar,SAR)的灵活操作性使其得到广泛关注。星载视频SAR模式是通过对感兴趣区域进行持续观测形成多帧SAR图像,再与视频技术相结合形成的一种新的遥感探测技术[1]。目前,机载视频SAR主要分为圆迹式[2-6]和聚束式[7],如图1所示。其中,圆迹式可以看作是聚束式的特殊形式,二者主要差别在视频SAR持续时间上。星载视频SAR主要是聚束式。视频SAR主要应用在如下两方面:一是对场景内重点动目标进行持续观测和监视,二是获取场景内重点静止目标的多方位信息。目前,美国桑迪亚国家实验室和美国通用原子航空系统公司,均已经完成了机载视频SAR技术的论证和关键技术的攻关,并通过机载飞行试验得到了视频产品,为视频SAR的发展奠定了基础。
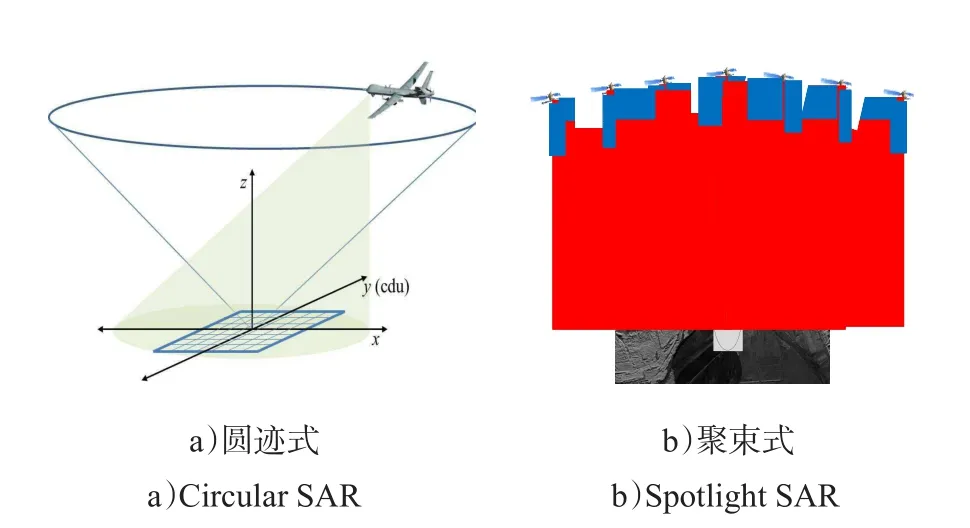
图1 机载视频SAR工作模式示意Fig.1 Airborne video SAR working mode
20世纪70年代起,运动目标检测技术逐步发展成为星载SAR的热点。然而,传统星载SAR模式在动目标检测和监视上存在各自的不足,如基于多通道的动目标检测方法只能检测目标径向速度,且存在盲速和速度模糊,2012年德国提出的双方向SAR(Bi-directional SAR)成像模式[8],脉冲重复频率(PRF)提高一倍,限制了测绘带宽;2014年日本提出的基于运动相关方程(Velocity Correlation Function,VCF)的方法计算量大[9],浪费资源。而本文提出的基于星载视频SAR的方法可以弥补以上方法的不足,且适应日益复杂的战场环境,可实现海上运动目标的检测与监视。
本文第一部分介绍了星载视频SAR工作机理;第二部分阐述了如何利用多帧SAR图像实现运动舰船的速度检测;第三部分介绍了一种适用于视频SAR后向投影(Back Projection,BP)成像算法;第四部分通过计算机仿真验证上述方法的有效性和合理性;第五部分,结论。
1 视频SAR工作机理
本文主要介绍聚束式星载视频SAR工作模式,如图1 b)所示。与传统聚束SAR不同的是,星载视频SAR将它的回波数据按照特定的方式(如分辨率等)划分成连续的回波片段,之后对其分别进行成像处理以得到该场景的序贯图像序列。经过图像后处理以及多媒体融合显示,最终以视频的形式再现目标场景信息,从而达到直观监视海上运动目标的效果。按方位分辨率将得到的回波数据划分成连续的回波片段,数据处理方式分为数据不相关的划分和数据相关的划分2种,如图2所示。

图2 星载视频SAR数据处理方式Fig.2 Spaceborne video SAR data processing mode
1.1 分辨率分析
分辨率是衡量SAR图像质量的重要指标之一,分辨率越高,获取的信息量越大,因而该模式下的分辨率显得尤为重要[10-11]。
1.1.1 距离向分辨率
星载视频SAR模式的距离向分辨率与传统条带模式的距离向分辨率相同,利用脉冲压缩的原理:

式(1)中:Br为雷达发射信号带宽;η为电磁波入射角;c为光速;σ为信号处理加权展宽因子(均匀加权下其值为0.886)。
1.1.2 方位向分辨率
星载视频SAR方位向分辨率分析与传统聚束SAR模式类似,本研究中方位向按照固定多普勒带宽将其划分为单独的帧片段。

式(2)中:R0为雷达与目标的最短斜距;Rref为仿真中心时刻雷达与目标间的中心斜距;V为卫星等效速度;φ为天线等效斜视角;va、vr为分别为目标在斜距平面内沿方位向和斜距向速度;λ为信号波长;fD为多普勒中心频率;fR为多普勒频率调频率。



图3 雷达与舰船几何关系示意图Fig.3 Geometry between radar and ship

因此,其理论上的方位向分辨率可以表示为[12]:

实际应用中,根据设定好的方位向分辨率,结合回波数据处理方式对回波数据进行划分。
1.2 帧速率分析
美国国防预研计划局DARPA、Sandia实验室和通用原子航空公司均有严格的SAR视频产品输出标准,如DARPA要求视频SAR的帧速率不能低于5帧/s,对视频产品的帧速率提出要求。图4是星载视频SAR帧速率分析示意图。经分析,数据不相关处理方式无法满足帧速率要求。
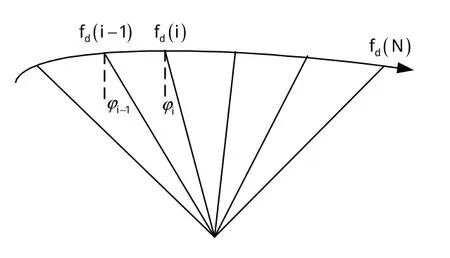
图4 星载视频SAR帧速率分析示意图Fig.4 Spaceborne video SAR’s frame rate analysis
由式(6)可知,SAR图像分辨率与多普勒带宽一一对应,当视频SAR每帧图像分辨率相同时,多普勒带宽相同。

每一帧图像对应的回波持续时间为

式(8)中,L=Rref( )sinφi-sinφi-1,即合成孔径长度。
数据相关处理方式中,假设相邻的2帧数据的重叠率为α,对应的帧速率为:

为了保证SAR视频产品的流畅度和清晰度,本文采用数据相关处理方式。
2 视频SAR海上目标检测
视频SAR是通过对同一区域进行持续观测,将得到的序贯图像,融合多媒体技术生成视频产品,利用其中2帧图像中动目标主体位置和阴影位置可以分别检测动目标方位向速度和径向速度。
2.1 方位向速度
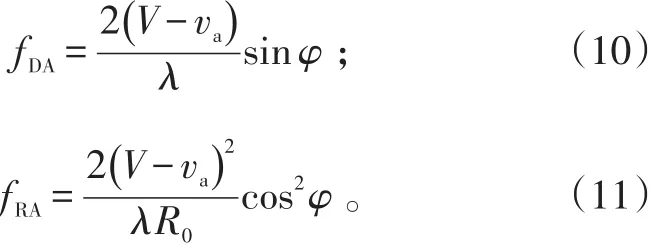
由式(3)、(4)可得,目标具有方位向速度时的多普勒中心频率和多普勒调频率分别为:
由多普勒中心频率和多普勒调频率的变化可知,动目标方位向速度会引起动目标在方位向位移和图像散焦。方位向位置偏移为

式(12)中:ΔnA为方位向偏移像素个数;fprf为脉冲重复频率。
可以利用不同帧图像中目标方位向位置偏差反演动目标方位向速度[13]。
当所取2帧SAR图像对应的斜视角满足φi=-φj时,目标方位向速度反演公式[13-14]为:

式(13)中:n为2帧图像中目标在方位向偏移像素个数;t0为2帧图像对应的时间差;Vg为波束指向在地面的移动速度。
通过求平均的方法减小测速误差[15]。
2.2 径向速度
目标具有径向速度时多普勒中心频率和调频率分别为:
由式(16)可知,在小斜视角情况下φ≈0,目标径向速度引起的多普勒调频率误差很小,可以忽略,即径向速度不引起图像散焦,只引起目标位置偏移。同时,不同帧图像中目标径向速度引起的多普勒中心频率误差几乎相同,则运动目标在方位向偏移相同。又因为不同帧图像的时间差和目标径向位移之间的耦合性,导致目标在不同帧图像中径向位置偏移相同[13]。
由于采用静止目标多普勒参数成像,导致动目标成像位置偏离真实目标所在位置,则在目标真实位置处会存在阴影。此时,可以利用不同帧图像中目标阴影位置的变化反演目标径向速度[14]。
3 视频SAR成像处理
由前面分析可知,采用数据重叠复用的方式提高帧速率,从而得到高流畅度视频产品。本文介绍的视频SAR工作在聚束模式下,因而适用于聚束模式的成像算法均可适用于视频SAR工作模式,如扩展线性调频变标算法[15](Extend Chirp Scaling Algorithm,ECS)、去斜线性调频变标算法[16](Deramp Chirp ScalingAlgorithm,DCS)、二维去斜线性调频变标算法[17](Two Dimension Deramp Chirp Scaling Algorithm,TDDCS)以及后向投影算法[18](Back Projection Algorithm,BP)。以上成像处理算法没有考虑数据相关处理的影响,对重叠数据区域进行多次计算,严重浪费了计算资源,降低了处理效率。故提出了一种适用于星载视频SAR的BP成像算法[19]。
传统BP算法是一种逐点进行相干叠加的时域计算方法,可应用于多种成像模式中,且无需几何校正,在斜视条件下依然可以实现高精度聚焦成像,可有效解决视频SAR方位观测时间长、距离徙动大的问题,但是计算量大,效率差。面向视频SAR的快速BP算法融合传统BP算法优点的同时,在帧与帧间存在数据重叠的情况下,处理后续帧数据时可利用前面已经处理好的帧数据,避免了数据的重复计算,可显著提高处理效率。该算法关键在于设置数据重叠率α,确定帧图像(帧孔径)及帧孔径内子孔径个数1/(1 -α),逐步进行子孔径形成,并更新循环移位寄存器的值为当前经过子孔径形成之后的值,当寄存器中保存的数据等于帧孔径对应数据时输出一帧SAR图像,循环计算,以此避免对前面子孔径数据的重复计算。
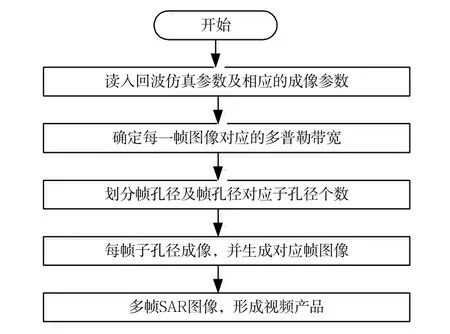
图5 面向视频SAR的BP成像算法Fig.5 Back projection algorithm for video SAR
4 计算机仿真
为了验证以上速度检测方法和成像方法的有效性,持续观测海面某一区域,进而检测海面运动舰船的速度。采用高频Ka波段来满足SAR视频产品的高清晰度要求。设置数据重叠率为0.9,由式(9)可得帧速率为28帧/s,满足视频产品对帧速率的要求。成像参数如表1所示。
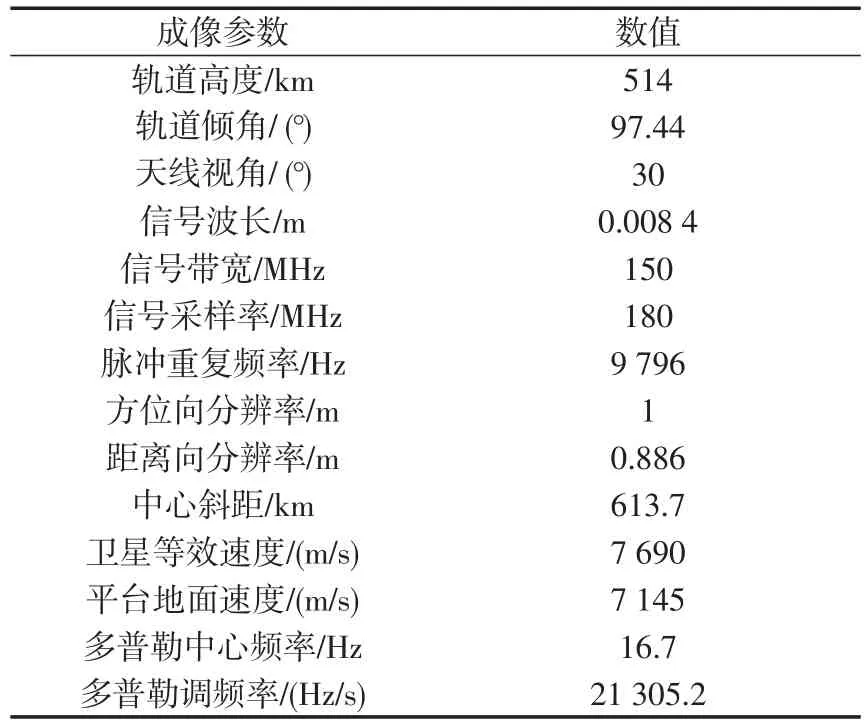
表1 成像参数
分3种不同的场景分别仿真验证。场景一:海上舰船只具有方位向速度va=10 m/s,如图5所示。场景二:海上舰船只具有径向速度vr=5 m/s,如图6所示。场景三:海上舰船同时具有方位向和径向速度va=10 m/s,vr=5 m/s如图7所示。
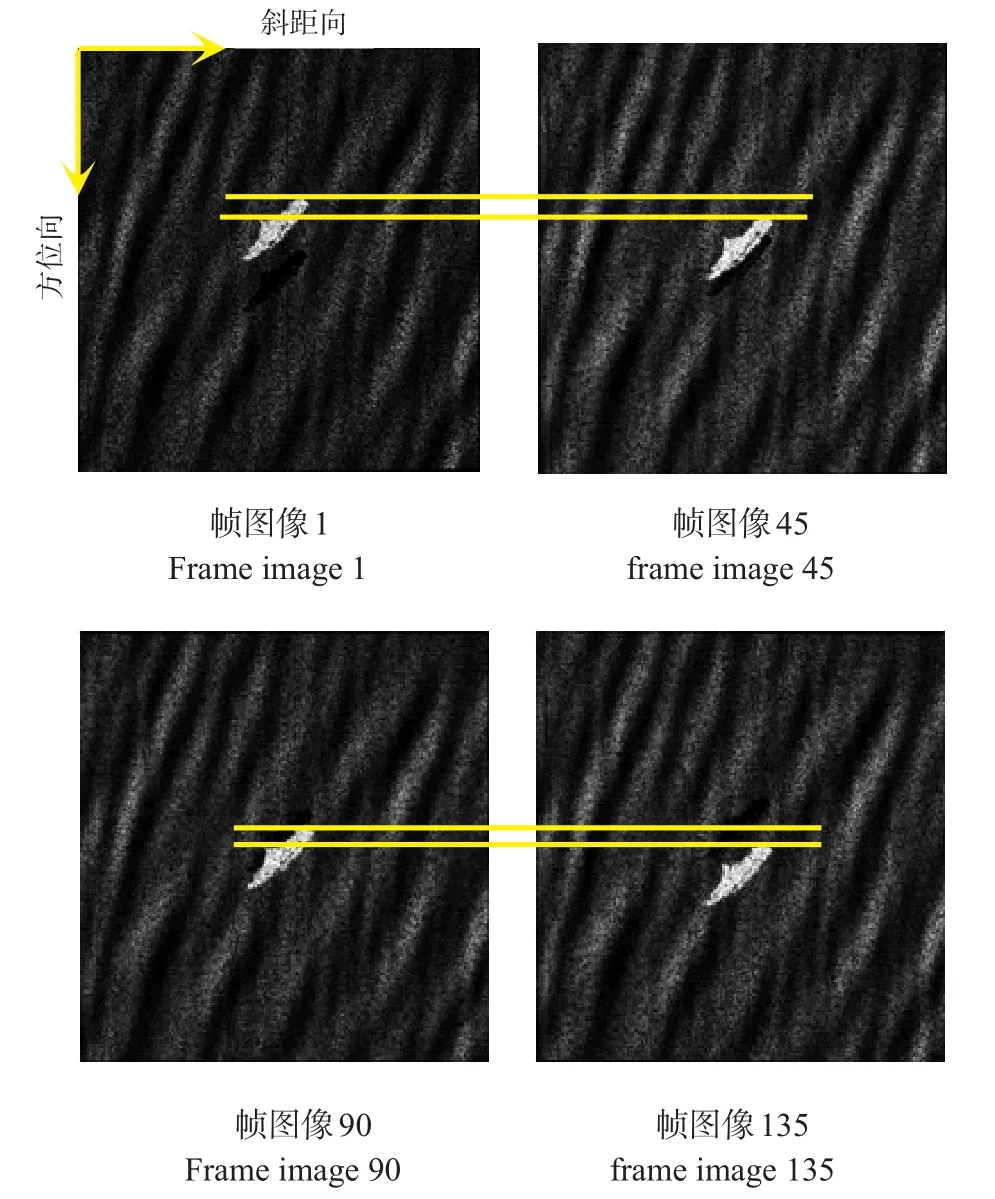
图6 va=10 m/s运动舰船成像结果Fig.6va=10 m/smoving ship’s imaging result
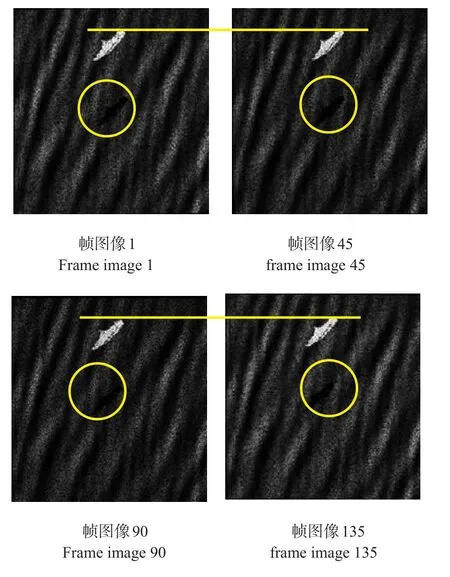
图7 vr=5 m/s运动舰船成像结果Fig.7 vr=5 m/smoving ship’s imaging result
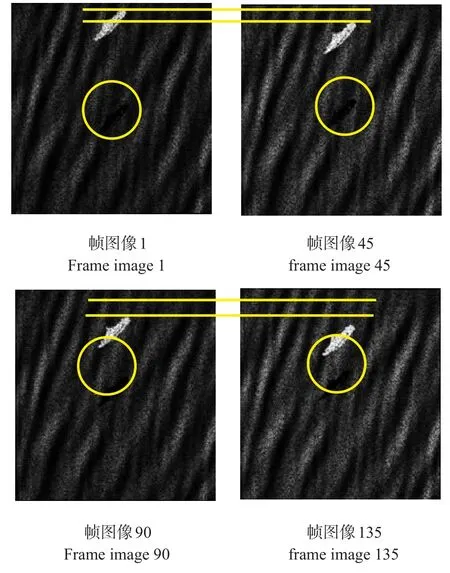
图8 va=10 m/s,vr=5 m/s运动舰船成像结果Fig.8va=10 m/s,vr=5 m/smoving ship’s imaging result
图6~8中,帧图像1、帧图像45、帧图像90和帧图像135之间的时间间隔为Δt=1.212 s。结合图像配准技术和式(13)、(14),图5中舰船的方位向速度检测结果如表2所示,平均方位向速度10.25 m/s。
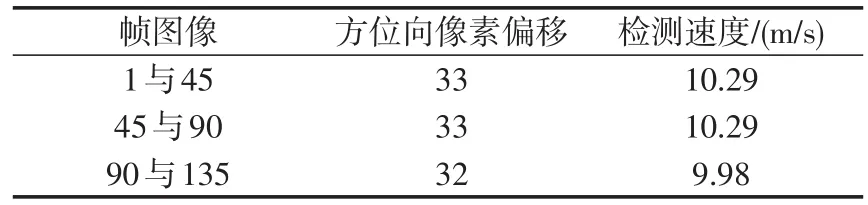
表2 舰船方位向速度检测结果
相对误差ΔVa=0.25 m/s,绝对误差2.5%,可利用多帧图像检测结果平均值方法提高检测精度。
当目标只有径向速度时,根据目标阴影位置检测径向速度,图7中舰船径向速度检测结果如表3所示,平均径向速度4.8 m/s。
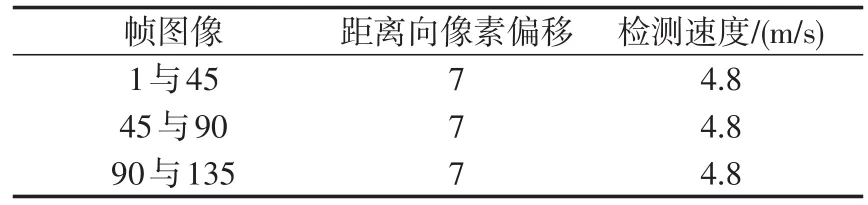
表3 舰船径向速度检测结果
相对误差ΔVr=0.2 m/s,绝对误差4.0%,仿真中设置的动目标径向速度较小,阴影偏移小。同时,信杂比小,舰船阴影与海杂波对比不明显,配准难度大,则检测误差较大。后期应继续研究图像配准算法提高目标速度检测精度。当舰船同时具有方位向速度和径向速度时,可采用舰船主体位置和阴影位置相结合的方法实现速度检测和运动监视。
5 结论
本文对星载视频SAR海上运动目标监视问题展开研究。首先,分析了视频SAR工作机理。为了保证SAR视频产品的清晰度和流畅度,采用数据相关处理方式,适用于视频SAR的后向投影算法来提高计算效率;利用序贯图像中舰船位置进行速度检测。与传统海上运动目标监视方法比,视频SAR可直观的观测舰船位移,估计速度基础上可预判舰船动机,为作战做好准备。结合图像配准算法和阴影检测机理,分析研究不同海况条件下的运动舰船速度检测精度与监视。
参考文献:
[1]RUIZHI HU,RUI MIN,YIMING PI.A video SAR imaging technique for aspect-dependent scattering in wide angle[J].IEEE Sensors Journal,2017,17(12):3677-3688.
[2]DAMINI A,BALAJI B,PARRY C,et al.A video SAR mode for the X-band wideband experimental airborne radar[C]//SPIE Proceedings.2011:76990E.
[3]J MILLER,E BISHOP,A DOERRY.An application of backprojection for video SAR image formation exploiting a subaperture circular shift register[C]//SPIE Proceedings.2013:874609.
[4]ROBERT LINNEHAN,JOHN MILLER,EDWARD BISHOP,et al.An autofocus technique for video SAR[C]//SPIE Proceedings.2013:874608.
[5]RANDOLPH L MOSES,JOSHUA N.Recursive SAR imaging[C]//SPIE Proceedings.2010:69700P.
[6]J MILLER,E BISHOP,A DOERRY.Applying stereo SAR to remove height-dependent layover effects from video SAR imagery[C]//SPIE Proceedings.2014:90930A.
[7]ANTHONY DAMINI,VINCENT MANTLE,GORDON DAVIDSON.A new approach to coherent change detection in video SAR imagery using stack averaged coherence[C]//IEEE Radar Conference.Ottawa,ON,Canada:IEEE,2013:1-5.
[8]MITTERMAYER J,PRATS P,WOLLSTADT S,et al.Approach to velocity and acceleration measuring in the bi-directional SAR imaging mode[C]//Geoscience and Remote Sensing Sysposium.Munich,Germany:IEEE,2012:5618-5621.
[9]MOTOFUMI ARILL.Efficient motion compensation of a moving object on SAR imagery based on velocity correlation function[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(2):936-946.
[10]许小剑,黄培康.雷达系统及信息处理[M].北京:电子工业出版社,2010:240-244.XU XIAOJIAN,HUANG PEIKANG.Radar system and signal processing[M].Beijing:Publishing House of Electronics Industry,2010:240-244.(in Chinese)
[11]袁小金.合成孔径雷达图像提高分辨率技术研究[D].上海:上海交通大学,2007:14-19.YUAN XIAOJIN.A study of resolution enhancement algorithm of synthetic aperture radar image[D].Shanghai:Shanghai Jiaotong University,2007:14-19.(in Chinese)
[12]魏钟铨.合成孔径雷达卫星[M].北京:科学出版社,2001:230-231.WEI ZHONGQUAN.Synthetic aperture radar[M].Science Press,2001:230-231.(in Chinese)
[13]王亚敏,陈杰,杨威,等.基于Hybrid-TOPS的星载SAR运动目标监视新模式[J].北京航空航天大学学报,2016,42(6):1256-1262.WANG YAMIN,CHEN JIE,YANG WEI,et al.New moving target monitoring mode with Hybrid-TOPS of spaceborne SAR[J].Journal of Beijing University of Aeronautics and Astronautics,2016,42(6):1256-1262.(in Chinese)
[14]WEI YANG,JIE CHEN,WEI LIU,et al.Moving target azimuth velocity estimation for the MASA mode based on sequential SAR images[J].IEEE Journal of Selected Topics in Applied Earth Observations And Remote Sensing,2016,10(6):2780-2790.
[15]HUIWANG, ZHANSHENG CHEN, SHICHAO ZHENG.Preliminary research of low-RCS moving target detection based on ka-band video SAR[J].IEEE Geoscience and Remote Sensing Letters,2017,14(6):811-815.
[16]MOREIRA A,MITTERMAYER J,SCHEIBER R.Extended chirp scaling algorithm for air and spaceborne SAR data processing in stripmap and scan SAR imaging modes[J].IEEE Transactions on Geoscience and Remote Sensing,1996,34(5):1123-1136.
[17]YANPING LI,ZHENHUA ZHANG,MENGDAO XING.Bistatic spotlight SAR proeessing using the frequency scaling algorithm[J].IEEE Geoscience and Remote Sensing Letters,2008,5(1):48-52.
[18]王鹏波,周荫清,陈杰,等.基于二维deramp处理的高分辨率聚束SAR成像算法[J].北京航空航天大学学报,2007,33(1):72-75.WANG PENGBO,ZHOU YINQING,CHEN JIE,et al.Imaging algorithm for high resolution spaceborne spotlight SAR data based on two dimension deramp processing[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(1):72-75.(in Chinese)
[19]ZHAO SONGTAO,CHEN JIE,SUN BING,et al.A modified back-projection algorithm for imaging geo-referenced SAR data[C]//IEEE International Geoscience and Remote Sensing Symposium.Milan,Italy:IEEE,2015:4491-4493.
