LIPS-300多模式离子推力器中和器优化研究
2018-04-24贾艳辉陈娟娟
贾艳辉,冯 杰,王 亮,陈娟娟,汪 忠,孙 威
(兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000)
0 引言
中和器是在离子推力器正常工作中,发射与束流离子电流相等的电子电流来满足推力器保持电中性的组件。中和器稳定高效的束流离子中和能力,是保证离子电推进平台应用的关键,一方面通过对束流离子的中和保持航天器电中性;另一方面中和电子与束流离子高效的耦合,可以有效降低中和器和栅极系统结构材料的离子溅射刻蚀损失率,因此,中和器性能及其与推力器的匹配性一直是电推进研究的热点问题之一,特别是随着多模式离子推力器研发和应用,该问题显得更为重要。
自离子推力器研制之初,即意识到束流离子中和问题的重要性,先后提出了数学分析模型[1-5]、流体和粒子跟踪计算机仿真模型[6-8],模型对束流离子中和过程、等离子体分布和触持极电压等进行了描述和预测。美国南加州大学研究者认为现有理论分析和数值仿真模型还不能完全解释束流的中和机理[9],离子推力器束流中和过程的试验研究可以直接获得宏观的中和器电参数和束流等离子体参数,是目前指导离子推力器工程设计优化的最主要手段之一。因此,南加州大学、NASA格林中心和日本国家防御研究院等针对离子推力器束流中和问题采用LP探针、法拉第探针等对束流不同中和比例下束流等离子体分布、中和器参数等进行了测量[10-11]。
面向全电推进卫星和深空探测应用需求,研发了多模式离子推力器,为了进一步优化离子推力器多模式覆盖下的性能和寿命,需要对束流宽范围调节下中和器工作特性开展深入研究。以LIPS-300多模式离子推力器为研究对象,采用数值建模与地面试验方法分别对束流中和及中和器的参数特点进行了研究,研究成果对离子推力器中和器的优化设计具有一定参考意义。
1 离子推力器及其中和器简介
LIPS-300多模式离子推力器,束流口径30 cm,如图1所示,放电室采用四极环切磁场设计[12],有效增加了束流均匀性,降低了栅极中心区域材料的溅射刻蚀率,提高了预期服役寿命。离子推力器主要性能指标如表1所列。

图1 LIPS-300离子推力器图Fig.1 LIPS-300 ion thruster

表1 LIPS-300离子推力器主要性能参数Table 1 Key parameters of LIPS-300 ion thruster
30 cm口径离子推力器采用LaB6发射体空心阴极,如图2所示,发射电流0~5 A,该空心阴极已经过SJ-9A和SJ-13卫星在轨飞行验证,地面验证单支寿命超过20 000 h[13-14]。
2 仿真和试验
2.1 仿真模型
采用二维轴对称建模,计算区域和边界条件如图3所示。Z和R分别为计算区域轴向和径向长度,Vp为等离子体电势,Vsc为屏栅电势,Vac为加速栅电势,rsc为屏栅孔半径,rac为加速栅孔半径。计算区域的下界为栅极孔轴线,坐标原点为计算区域的左下角。
采用泊松方程对计算区域的电势进行求解。对于二维轴对称结构,泊松方程表示为:

式中:Ф为静电势;e为电子电量;ni为离子数密度;ne为电子数密度;ε0为真空介电常数;r和z分别为计算区域径向和轴向坐标。采用有限差分方法结合高斯-赛德尔迭代法对式(1)电势求解,之后采用线性差分方法求解电场。电势求解边界条件选取如图3所示,两栅极为等势体,左边界为放电室等离子体电势,Ф=Vsc+Vp,其余边界取为Neumann边界条件。
对于单个栅极孔,每个时间步从左边界进入到计算区域的离子数ΔN由式(2)确定。采用PIC方法对束流离子进行跟踪,假设中和器电子对离子推力器束流离子完全中和,电子数密度ne利用Boltzmann方程确定。粒子边界的处理和束流引出过程模拟详见文献[16]。

2.2 试验流程
推力器束流中和试验在电推进专用设备TS-6C上开展。TS-6C设备真空舱直径4.2 m,长6.0 m,极限真空度优于5.0×10-5Pa,推力器满功率工作时工作真空度优于1.0×10-4Pa。中和器组件级性能测试在空心阴极专用地面测试设备TS-5A内开展,真空舱直径0.3 m,长0.4 m,极限真空度优于5.0×10-5Pa,3.0 mL/min氙气供给下,真空度优于2.0×10-2Pa。
在推力器上,分别通过调节中和器流率和推力器束流,研究中和器触持极电压变化特征,由于地面试验中氙气供给管路较长,要求每次调节完流率后,30 min进行数据采集,以保障中和器实际流率与流量计显示值一致。中和器电参数随流率变化规律的组件级试验,通过逐步调节中和器供给流率,监测并记录触持极电压及电压振荡峰峰值变化规律。
3 计算结果与分析
图4是采用PIC模型计算的离子推力器加速栅下游区域轴向电势分布,模型按照束流离子完全被中和进行仿真,输入束流密度5.19 mA/cm2、加速栅电压-200 V。计算结果显示,在加速栅下游1.6 mm处,束流电势开始升高,最大值约5 V,这主要是由于1.6 mm以内,加速栅负电位对局部电势分布影响占主导,随着与加速栅距离的增加,1.6 mm以外束流离子对局部电势影响占主导。推力器稳定工作时,束流区域必须有一定的正电势才能保障中和电子趋向于束流运动,此电位即束流耦合电位,国外实际测量数据在10 V左右,仿真与试验结果的差别可能为仿真模型建模时未考虑中和器电子本身的逸出功及电子与离子的碰撞效应。根据Harold Mirels建立的离子推力器束流中和一维分析模型[17],当束流不存在离子反流时,最高电位在栅极下游约1.4倍栅间距处,模型中栅极间距取值为1.0 mm,计算值为1.6 mm,与国外分析模型符合较好。
图5是在TS-5A真空设备内中和器组件模拟不引束流的二极管工作模式触持极电压及其振荡峰峰值。试验显示二极工作模式下,触持极电压及其振荡峰峰值随氙气流率升高而降低,在0.8 mL/min时工作模式转入振荡峰峰值小于5 V的斑状工作模式(通常定义中和器触持极电压振荡峰峰值≤5 V时为斑状模式,反之为羽状模式,要保障推力器长寿命,中和器必须工作在斑状模式),因此,建议应用中和器流率值大于0.8 mL/min,并考虑一定的裕度。
图6是推力器工作在5 kW,引出束流3.7 A下的中和器触持极电压及其振荡峰峰值随流率的变化规律。引束流情况下,中和器在2.2 mL/min时过渡到斑状模式,转变点流率大于二级放电模式。图5与图6对比显示,中和器工作在引束流时的三极模式下,触持极电压低于未引束流状态。图6说明,LIPS-300离子推力器中和器流率设置不能低于2.2 mL/min。
图7是推力器分别工作在5 kW、4 kW和3 kW时中和器的放电特征。随着中和器氙气流率的增加,在改变引出束流值时,触持极电压及其振荡峰峰值无明显变化,而流率较低时,中和器工作电参数容易受到引出束流值的影响。图7说明,在一定流率供给下,中和器随束流的增加,触持极电压降低,振荡峰峰值升高,这主要是由于,中和器工作在斑状模式下,放电表现为负阻特性,即触持极电压随发射电子电流升高而降低。
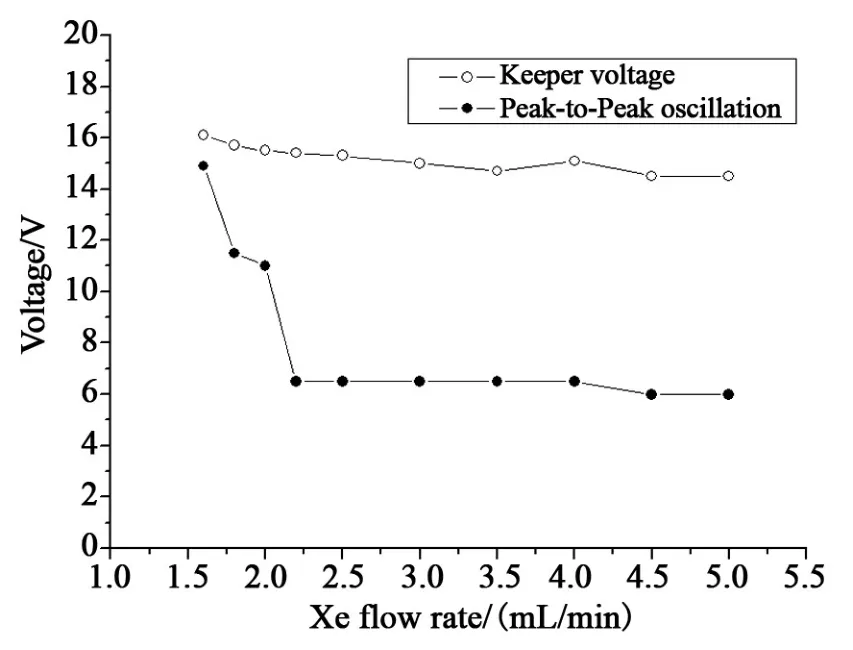
图6 引出束流3.7 A时的触持极电压及其振荡峰峰值随中和器氙气流率的变化规律曲线Fig.6 The keeper voltage and its peak-to-peak oscillation versus to Xe flow rate on 3.7 Aion beam current

图7 不同引出束流下中和器触持极电压及其振荡分布曲线Fig.7 The keeper voltage and its peak-to-peak oscillation versus to ion beam value
4 结论
通过数值仿真获得了加速栅下游区域的电势轴向分布,计算结果显示中和器电子与束流离子间耦合电势约5 V,束流电势峰值出现在加速栅下游约1.6 mm处,与文献报道结果符合较好。
实验测量了在不引与引束流情况下中和器触持极电压及其振荡峰峰值,实验结果显示离子推力器引束流时中和器触持极电压低于未引束流工况,结果与中和器斑状模式下负阻特性相符;在引束流时,中和器斑状-羽状模式流率转变点由0.8 mL/min提高到2.2 mL/min,需要进一步开展研究;建议LIPS-300离子推力器中和器流率设置为≥2.2 mL/min,以保证中和器始终工作在优化的斑状模式。
参考文献:
[1]StaffRW.ElectrostaticPropulsion[J].ProceedingsoftheIRE,1960,48(4):548-553.
[2]French P.Circular beam neutralization,progress in astronau⁃tics and rocketry,volume 5:electrostatic propulsion[M].Aca⁃demicPress,NewYork,1961:237-250.
[3]MirelsH.Onionrocketneutralization,progressinastronautics and rocketry,volume 5:electrostatic propulsion[M].Academ⁃icPress,NewYork,196:1373-381.
[4]KooyersGP.Computersimulationoftheelectronmixingmech⁃anisminionpropulsion[J].AIAAJournal,1963,1(11):2525-2528.
[5]Parks D E,Mandell M J,Katz I.Fluid model of plasma outside ahollowcathodeneutralizer[C]//AIAA,1981.
[6]WheelockA,CookeD,GatsonisN.ComputationalModelingof Ion Beam-Neutralizer Interactions in Two and Three Dimen⁃sions[R].AIAAPaper,2004.
[7]Wheelock A,Cooke D L,Gatsonis N A.Computational Analy⁃sis of Current Coupling of Ion Beam-Neutralizer Interactions[J].AIAA,2005,3692:10-13.
[8]Mikellides I G,Goebel D M,Snyder J S,et al.Neutralizer hol⁃low cathode simulations and validation with experiments[R].AIAA,2009.
[9]Ding N,Polansky J,Downey R,et al.Experimental studies of ion beam neutralization:preliminary results[J].AIP Confer⁃enceProceedingsAIP,2011,1333(1):401-406.
[10]Foster J E,Williams G J,Patterson M J.Characterization of anionthrusterneutralizer[J].Journalofpropulsionandpower,2007,23(4):828-835.
[11]FosterJE,PattersonM,PencilE,etal.Neutralizercharacter⁃ization of a NEXT multi-thruster array with electrostatic probes[R].AIAAPaper,2006.
[12]Zhang T P.Electric propulsion development for DFH-4SP satelliteplatform[R].IACC,2014.
[13]YanhuiJ.Currentstatusof 5aLab6hollowcathodelifetests in lanzhouinstituteofphysics(LIP)[C]//LondonWASET,2015.
[14]杨威,陈继巍,贾艳辉,等.离子推力器空心阴极点火可靠性评价研究[J].真空与低温,2015,21(2):96-102.
[15]Wang J,Anderson J,Polk J.3D Particle Simulations of Ion OpticsPlasmaFlow[C]//AIAA,2005.
[16]贾艳辉.LIPS-200离子推力器寿命预测和评价研究[D].兰州:中国空间技术研究院,2012.
[17]Mirels H,Rosenbaum B M.Ananlysis of 1D Ion Rocket with GridNeutralization[R].NASATND,2012.