逐次差分代换的对偶算法
2018-04-21徐嘉
徐 嘉
(西南民族大学计算机科学与技术学院,四川 成都 610041)
逐次差分代换算法起源于非常朴素的数学思想,即“非负实数相加或相乘仍然是非负的”.最初的差分代换方法是用于证明对称不等式的.众所周知,这个方法有点类似于数学分析中著名的阿贝尔(Abel)代换(用法有所不同),国外也有人称之为buffalo way(水牛方法或暴力方法,简称BW).一些相当困难的对称不等式可以轻易的被这个方法解决.而这些不等式(次数高变元多)是其它方法(或算法)很难处理的.有明确的资料显示,这一方法曾经被多人在正式的期刊中使用,如文献[1].但是这些仅仅只是使用方法,而不是对方法本身的研究和探讨.它的较为深刻的发展则是非常近的事.从差分代换到逐次差分代换是这一方法发展中的关键一步.这一步是在文献[2]中完成的.Yang不但引入了一般的差分代换的概念和基本代换矩阵,还编写了Maple程序SDS,用于自动探索性证明代数不等式.正是这个短程序SDS的有效性,激起了后续的进一步研究.逐次差分代换的一个明显的缺点是对不成立的不等式没有任何作用.针对这一点,杨路和姚勇在文献[3]中改进了逐次差分代换算法,使用了非常简单的思想,即在做每一次代换的同时再验证一个点处的值(通常取点 (1,…,1) 或者点 (1,0,…,0)).改进后的算法被称为TSDS,它被证明对不成立的不等式是完备判定的[3],并且还能够自动输出反例.这个改进对探索不等式是非常有用的.因为在被证明之前,我们并不知道所研究的不等式是否成立.TSDS验证了一系列不等式猜想是不正确的,其中包括Vasc猜想[4-5]和杨学枝猜想[6].
关于逐次差分代换算法的一个重要问题是终止性问题,也就是对什么样的多项式TSDS算法会终止,输出结论.这个问题至今仍悬而未决.在双变元的情况,文献[7]中已经解决.证明了双变元的齐次多项式如果无平方因子,则算法TSDS总是终止的.同样重要的是对正定形式,逐次差分代换算法是否终止.很不幸,答案是负面的.在文献[7]中,举出了实例,说明对正定形式,逐次差分代换算法仍可能不终止.姚勇因此考虑改变基本代换矩阵,引入了带权重的基本代换矩阵[7].建立了新的差分代换算法NEWTSDS,新算法被证明对正定形式是终止的.姚勇和本文作者合作在文献[8]中证明了新算法的适用范围整体上优于著名的Polya方法的适用范围.
逐次差分代换算法被应用于证明带逻辑连词“∧”(and)的不等式命题是不难的,在证明一类根式不等式时会遇到,它已经在文献[9]中被大量使用.但是在实代数几何中,常常也会遇到带有逻辑连词“∨”(or)的命题.下面就是一个简单的例子.
考虑二次多项式

假设 a > 0,c≥0,问a,b,c满足什么条件时,对任意x∈ℝ+(x≥0),下式都成立:

容易看到答案是:

这就是一个典型的带逻辑连词“∨”的不等式命题.如果a,b,c是常数,验证这样的命题自然不会有什么困难,可是如果a,b,c带有变量,那么这个问题就不那么简单了.例如证明下面的二次型在上是非负的(这种二次型被称为copositive二次型[10]).

容易证明条件a>0,c≥0是满足的,按照上面的结论就还需要证明:
对任意点 (x2,x3,x4,x5) ∈ ℝ4+有

或者判别式 -x2x4+x3x4-x3x5≤0.
可是-x2+x3+x4-x5和-x2x4+x3x4-x3x5在ℝ4+上都是不定的.时而取正值,时而取负值.原来的逐次差分代换算法是不适用于证明这样的命题的.
本文的目标就是改进原来的逐次差分代换算法,使得改进后的算法可以用于证明含逻辑连词“∧”和“∨”的不等式命题.本文剩余部分内容的安排如下:第1节简单地描述了逐次差分代换算法的基本内容;第2节是新的对偶算法的建立过程;第3节是对偶算法终止性的理论结果;最后一节是算法的初步应用.
1 逐次差分代换算法的基本知识
在这一节,我们将对需要用到的基本知识作些简单介绍.本小节的主要内容来自文献[3,7,8],也可见专著[11-13].
考虑如下n×n三角方阵

矩阵G被称为重心矩阵,如果G可以由Gn经过行置换得到.
设Sn是集合 {1,2,…,n }上的置换对称群.Pσ是置换σ对应的置换矩阵.重心矩阵也可以表示为:

多项式f的差分代换集被定义为DS(f):

一般地,多项式f的k阶差分代换集被定义为DS(k)(f).

下面给出基于重心矩阵的逐次差分代换算法(GSDS).
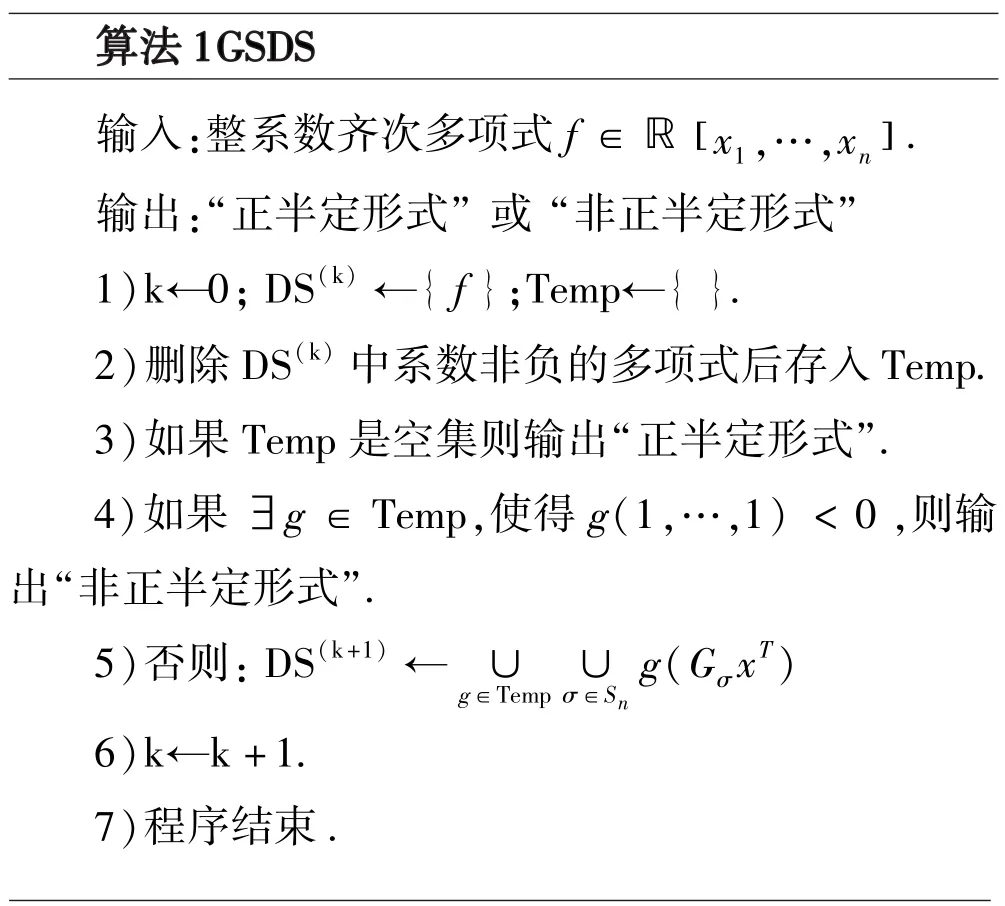
算法1GSDS].输出:“正半定形式”或“非正半定形式”1)k←0;DS(k)←{f};Temp←{}.2)删除DS(k)中系数非负的多项式后存入Temp.3)如果Temp是空集则输出“正半定形式”.4)如果 ∃g∈Temp,使得g(1,…,1) < 0,则输出“非正半定形式”.5)否则:DS(k+1)← ∪输入:整系数齐次多项式f∈ℝ x1,…,xn[g(GσxT)6)k←k+1.7)程序结束.g∈Temp ∪σ∈Sn
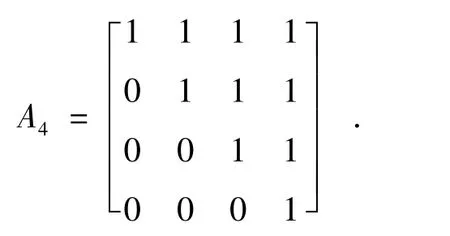
这里的逐次差分代换算法GSDS是基于重心矩阵的.最初的差分代换是基于矩阵
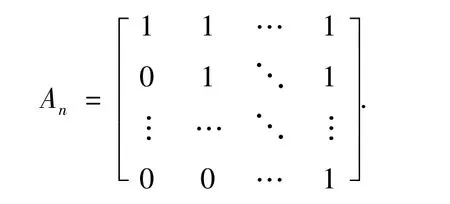
只需将算法1中的矩阵Gn换为矩阵An就可得到原来的逐次差分代换算法.
算法1的正确性证明可以参看文献[7-8].由杨路和姚勇编写的程序TSDS5是算法1的Maple平台实现,可到相关网站下载该程序.
这一节只举一个应用的例子.
例1.1(arqady)已知a,b,c>0且满足a+b+c=1.证明:


这是一个有名的形式简单,证明困难的不等式.通过去分母,齐次化,上式转变为证明:运行程序 TSDS5中的命令“TSDS”或“NEWTSDS”,都在5步代换之后终止,运行时间分别为0.063s,0.047s.输出结果为:
‘The form is positive semi-definite’也就是不等式成立.
2 对偶算法
ℝn表示n维实向量空间.其中的点用列向量表示.标准单纯形Δn由下式定义

本节中关心的是Δn上的单纯形.设B1,…,Bn是Δn上n个仿射无关的点,它们张成(n-1)维单纯形 [B1,…,Bn]Δ,即

记号“[]Δ”带下标是为了与矩阵记号“[]”相区别.而 [B1,…,Bn]是表示以B1,…,Bn作为列的矩阵 .记x=(x1,…,xn)T,则单纯形可以表示为更简洁的形式

这就是单纯形的顶点表示法.
可以通过重心矩阵来表达标准单形的重心剖分,也就是

这里记号 [ Gσ]Δ表示矩阵Gσ的列所张成的单纯形,下同.
下面的引理来自文献[7-8].
引理2.1 多项式f∈ℝ[x1,…,xn],则有如下等价关系成立

这个引理是逐次差分代换算法的基础.重心矩阵的集合

一般地,定义GS(k)

仿照算法1有算法2.

?

?
接下来比较算法1和算法2的不同点.
算法1中的局部变量Temp存储的是多项式,而算法2中的局部变量Temp存储的是单纯形 (或代换).换句话说,在算法1中,代换始终保持不变,多项式在不停的变化.在算法2中,给定的多项式始终不变,代换却在不停的变化.可以明显的看到,算法1能完成的任务,算法2仍然可以.
下面考虑一组带有逻辑连词“∧”(and)和“∨”(or)的多项式集合.
对形如

的公式,明显算法1和算法2都是适用的.下面主要考虑形如

的公式.为了使算法2能够适用于判断公式Φ是否成立,还需对算法2做一点小的修改.

?
?
说明:
①算法3中的矩阵Gσ也可换为An以获得同最初的逐次差分代换类似的改进算法.它也是有应用价值的,见例4.1.
②算法3的基本思想仍然是明显的.根据重心剖分的基本性质,每循环一次,单纯形的直径将减小1/3.因此算法3记录的单纯形,随着循环次数的增加,将变得非常小,渐渐趋近于一些点.粗略的看这就相当于将点代入多项式,来观察多项式系数的变化规律.
③算法3的正确性是明显的.它的终止性同算法1一样可能不终止.它的适用范围明显比算法1大了很多.下一节将证明算法3关于终止性的理论结果.
3 主要理论结果
在这一节将要证明两个关于算法3的终止性的定理.
定理3.1 f1,…,fs∈ ℝ [x1,…,xn] 是齐次多项式,给定公式:

如果存在点P∈Δn,使得公式Φ不成立,则算法3是终止的,并且输出“false”.
证明:假设点P∈Δn使得公式Φ不成立,也就是P满足

由多项式函数的连续性,我们知道存在点P的一个邻域O(P,ε),这个邻域中的点都满足

根据重心剖分的基本性质,算法3每循环一次,单纯形的直径将减小1/3.随着循环次数的增加,单纯形将变得非常小,渐渐趋近于一些点.因此对充分大的k,存在单纯形

此时有:

也就是算法3最多经k次循环将输出 “false”.
定理3.2f1,…,fs∈ℝ [x1,…,xn] 是齐次多项式,给定公式

如果对任意点P∈Δn,都有

则算法3是终止的,并且输出“true”.
证明:这里的证明依赖于Δn的紧致性和文献[8]中的主引理.
不失一般性,可以假设给定点P对某个固定的i成立

(注意,这里对不同的P,多项式fi可能是不同的)由多项式函数的连续性,我们知道存在P的一个邻域O(P,ε),这个邻域中的点都满足

也就是说,在邻域O(P,ε)内下面公式是真命题

由于点P的任意性,对Δn的每一点选择一个邻域,可以得到Δn的一个开覆盖,根据有限覆盖定理,可以选出有限个邻域盖住Δn.因此当对Δn进行充分多阶的重心剖分后,每一个细小单形将被某个邻域盖住,不妨设单形:

如果fi(G1…Gkx)的系数都是非负的,则结论已经成立.如果fi(G1…Gkx)的系数中还含有负数,按假设fi在小单形为[G1…Gk]Δ上的值是严格正的,则根据文献[7]中的主引理,单形为[G1…Gk]Δ可以进一步细分,使得[G1…Gk]Δ的有限次重心剖分的每一个小单形[Λ]Δ⊂[G1…Gk]Δ都有fi(Λx)的系数是非负的.也就是,算法3最终将输出“true”.
下面的定理是定理3.1和定理3.2的明显推论.
推论3.3f1,…,fs∈ℝ [x1,…,xn] 是齐次多项式,给定公式

如果算法3不终止,则所给定的公式Φ是真命题.
推论3.3表明对:

这类命题算法3是半可判定的.
4 应用
现在来应用算法3.
例4.1证明∀(a,b,c,d) ∈ Δ4如下公式成立

证明:考虑矩阵
对称群S4有24个元素.所以,初始的GS(0)中有24个矩阵.

记f1=b+c-a-d,f2=ac+bd-bc.首先计算

f2所有的系数全是正的.所以,将A4从GS(0)中删除.同样计算全部24个矩阵发现:
f1(PσA4(a,b,c,d)T) , f2(PσA4(a,b,c,d)T) ,中至少有一个是系数全是正的,所以Temp是空集.程序输出“true”后停止.
例4.1比较简单,程序运行了一次循环就停止了,证明了公式是成立的.下面将考虑困难得多的问题:
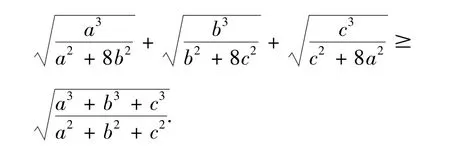
在文献[5]中提出了如下公开问题:
例 4.2a,b,c是正实数. 证明
为了解决这个问题,需要如下引理,它来自文献[14].
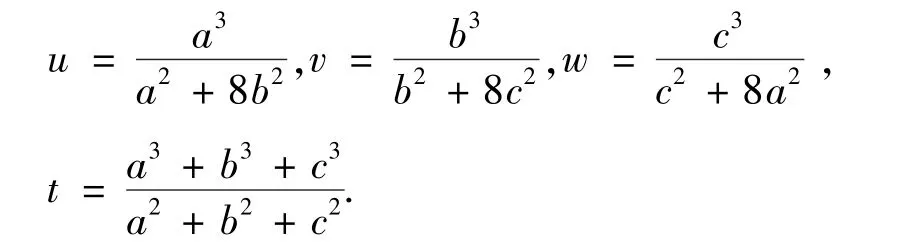
引理4.3u,v,w,t是正实数,则下面等价关系成立

其中

例4.2的证明:令
代入R1,R2,R3.通过去分母,转化为三个齐次多项式,分别有次数 9,18,36. 其中具有424项,最大系数为235583387168.
通过引理4.3,还需要证明如下公式成立

在Maple平台编程,算法3在运行了7次循环之后终止,输出了结果“true”.用时74s.
讨论:例4.2的方法可以被应用于更加广泛的型如

不等式的机器证明.
现在考虑带有量词"∃"的命题.注意到公式

等价于

因此算法3可以被应用到寻找满足一组不等式的特解问题.恰好配平方和就可以归结到这样的问题.下面仅举一个简单的例子.
例4.3请给出多项式

的平方和表示.
根据Gram矩阵方法,问题可以归结到寻找实数a使得如下的矩阵C(f)是半正定的矩阵.

计算它的特征多项式

矩阵C(f)是半正定的等价于T(z)的根都是非负实数.也就是a需要满足不等式组

把条件放宽一点,a,b>0满足如下严格不等式是足够的.
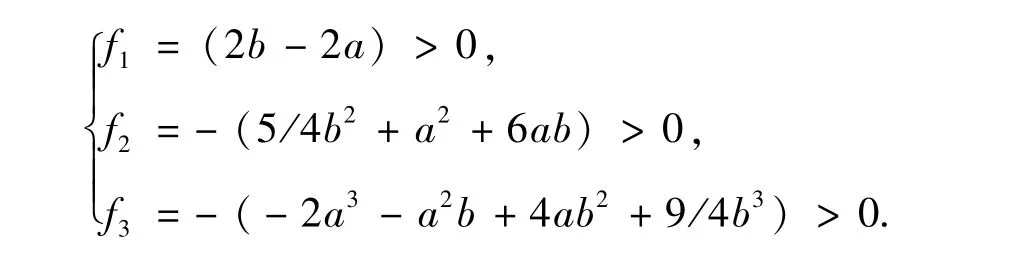
这样就转化为了

a分两部分a≥0,a<0.分别求解上面的公式.使用算法3,仅仅循环了一次就获得了一个解

回到不等式(4.1),a=-1是一个解.因此得到一个半正定矩阵

分解为C(f)=BBT,

最后获得平方和表示为

[1]AN ZHENGPING.Some Techniques for Proving Inequalities[J].High-School Mathematics,1995,5:7-10.
[2]YANG LU.Solving Harder Problems with Lesser Mathematics.Proceedings of the 10thAsian Technology Conference in Mathematics[C].ATCM Inc,2005:37-46.
[3]YANG LU,YAO YONG.Difference Substitution Matrices and Decision on Nonnegativity of Polynomials[J].Journal of Systems Science and Mathematical Science,2009,29(9):1169-1177.(in Chinese).
[4]VASILECIRTOAJE.Algebra Inequalities:old and new methods[M].Zalau:GIL Publishing House,2006,46.
[5]VASILECIRTOAJE,VO QUOC BA CAN,TRAN QUOC ANH.Inequalities with Beautiful Solutions[M].Zalau:GIL Publishing House,2006.
[6]YANG XUE ZHI.Research on Mathematical Olympiad inequalities[M].Harbin,Harbin Institute of Technology Press,2009.(in Chinese).
[7]YAO YONG.Infinite product convergence of column stochastic mean matrix and machine decision for positive semi-definite forms[J],Science China Mathematics ,2010,40(3):251-264.
[8]XU JIA,YAO YONG.Polya’s Method and the Successive difference substitution Method[J].Scientia Sinica Mathematica,2012,42(3):203-213.(in Chinese).
[9]XU JIA,YAO YONG.Rationalizing Algorithm and Automated Proving for a Class of Inequalities Involving Radicals[J].Chinese Journal of Computers,2008,31(1):24-31.(in Chinese).
[10]徐嘉,李高平.copositive二次型与copositive矩阵[J].西南民族大学学报(自然科学版),2011,37(4):504-508.
[11]YANG LU,XIA BI CAN.Automated Proving and Discovering on Inequalities[M].Beijing:Science Press,2008.(in Chinese).
[12]XIA BI CAN,YANG LU.Automated Inequality Proving and Discovering[M].Singapore:World Scientific Publishing Co.Pte.Ltd.,2016.
[13]WANG WAN LAN.Approaches to Prove Inequalities.Harbin,Harbin Institute of Technology Press,2011.(in Chinese).
[14]徐嘉.三类根式不等式的有理化与机器证明[J].西南民族大学学报(自然科学版),2016,42(2):200-206.