同步开关过零投切精度分析
2018-04-18王子博王道顺柳光伟李宇宙
王子博,王道顺,柳光伟,李宇宙
(1.路易斯安那理工大学 工程与科学学院,美国 LA 71270; 2.大连交通大学 机械工程学院 辽宁 大连 116028)
0 引言
功率因数对高效用电有十分重要的作用.用并联电容器的方式提高功率因数,是目前在企业中普遍应用的一种节电方式.因其价格低廉、操作简单、效果明显而得到广泛应用[1].将电容器接入或断开电网的操作中,由于可能存在大电流与强电弧造成对电网的污染以及设备的损害,因此必须采用专业的电容器投切开关才能避免.投切电容器的技术要求是:要在触点两端电压为零时接通,使电容器无涌流投入;在流过触点的电流为零时断开,使触点无电弧分离[2].常见电容器投切开关有四种形式:交流接触器、晶闸管开关、交流接触器与晶闸管复合开关,以及同步开关.同步开关也称选相开关,可以说是机械开关与微处理器技术的复合开关.既保持了机械开关的可靠,又克服了晶闸管易损坏的缺点,还有微处理器控制精准的优点,因此正得到越来越广泛的使用[3].
同步开关的工作原理与实现方法,理论上讲并不难,但实际上要设计出一台高技术指标的同步开关却并非易事.如果设计考虑不周,就达不到预期的效果.因此就有人提出了永磁真空开关与磁保持继电器的复合开关方案[4],来提高投切开关寿命.同步开关的设计难度,主要是投切动作时间控制精度较难把握.针对这一问题,本文从同步开关的工作原理入手,深度分析影响过零投切精度的诸多因素,并提出高性能技术指标产品的解决方案.
1 过零投切工作原理与精度要求
按投切要求,要在继电器触点两端电压为零时接通;要在流过触点的电流为零时断开.以接通为例,如图1所示,图中的正弦波表示待投切交流电.如果有投切指令,微处理器从过零检测电路得到的零点A开始,延时T1时间再发出继电器动作指令.继电器经过T2时长的动作时间后, 在下一个电压过零点B处接通触点.在过零点B处接通,是理想状态,但实际动作肯定会有误差.下面就分析一下误差会带来多大影响.
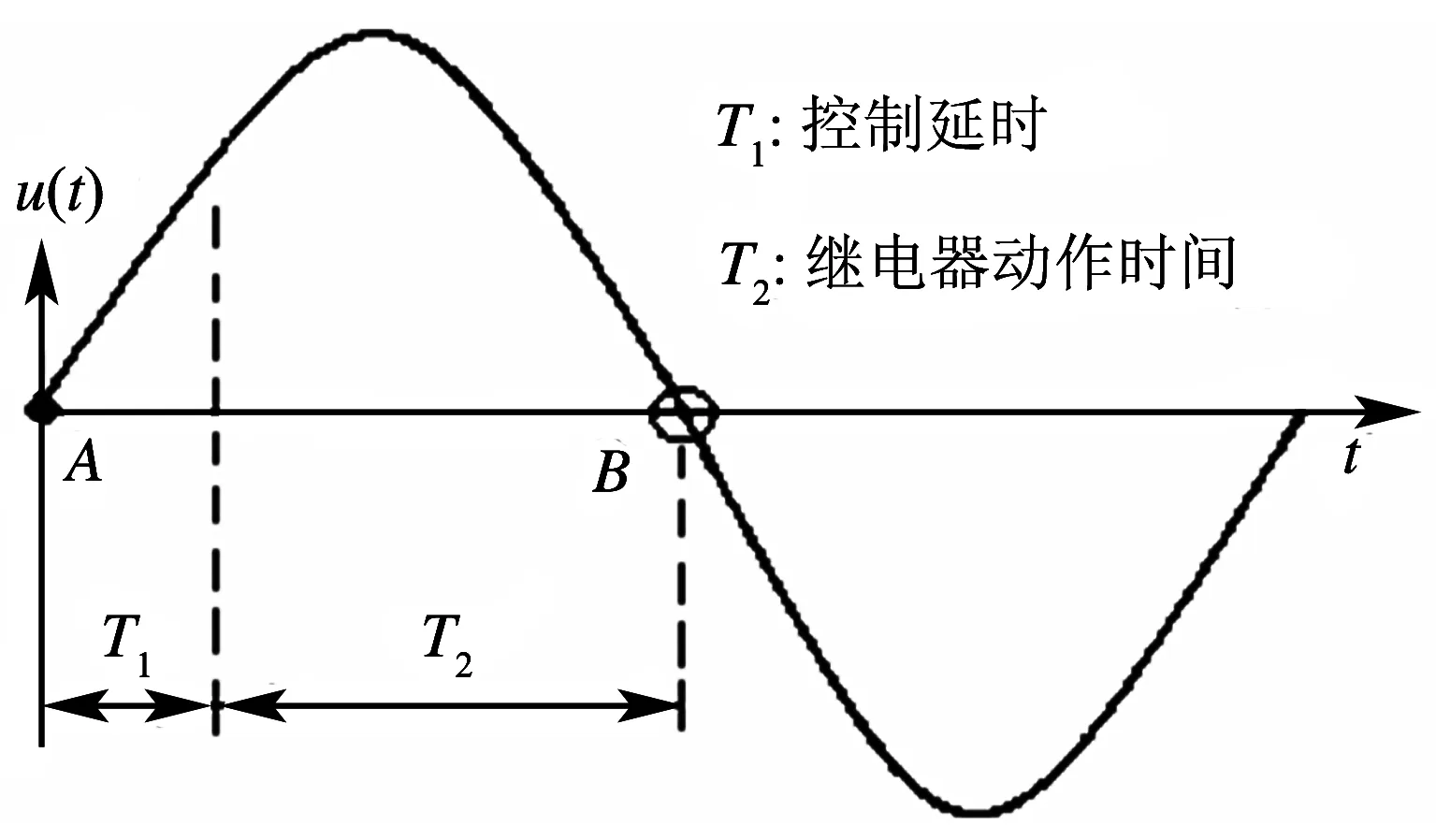
图1 过零投切原理示意图
50 Hz的交流电,周期为20 ms.每个周期内有上下2个波峰,每个波峰宽度时间为10 ms.就是说,从过零点时刻开始,5 ms后就会到达峰值.因此,必须严格控制时间,才能保证继电器触点在过零时切换[5].以接通来说,即使有0.1 ms的误差,那么继电器触点两端的电压也有:
式中,T为交流电周期,t为偏离零点的时间值.
对于380 V的交流电,其峰值电压≈537 V,17 V的电压约占峰值电压的3%.即使将这17 V的电压称作是“零点”,那也要保证继电器接通时间误差在±0.1 ms之内.
±0.1 ms的接通时间误差,从技术上来讲,要求是相当高的.例如,文献[1]设计的同步开关指标是:继电器触点可在电压过零点±0.5 ms内接通,可在电流过零点±1 ms内断开.0.5 ms的误差,实际接通电压高达84V,已达峰值电压的15.6%,实在是不该称之为零点了.
理论上讲,同步开关具有明显的技术优势,只要解决了高精度控制的问题,应用效果就能大幅度提高.目前,许多同步开关效果不理想,其中一个原因是对影响同步开关投切精度的因素分析不到位、不细致.因此本文特别以μs为时间单位,以±100 μs的时间误差为目标,在深入分析影响精度因素之后,提出达到这一技术指标的解决方案.
实际工程中通常是三相投切,但大多采用3台单极同步开关来实现三相电容器的投切[6].本文主要内容是精度分析,为了讨论问题方便,因此也将分析对象简化为一路开关.继电器在电压零点时接通,在电流零点时断开,这两个问题在技术上具有相似性,因此,本文以“继电器在电压零点时接通”为主题展开讨论.磁保持继电器是同步开关中最常用的继电器,有单线圈双向驱动,与双线圈单向驱动两种形式.本文中采用双线圈驱动形式.
2 过零投切精密时序分析
图1只是大概说明过零投切的工作原理.如果要从技术角度深入分析,就要用到图2的投切动作时序图.图2中共有5个时间坐标轴,下面分别予以说明.
(1) 电压波形:待投切的交流电压波形;
(2) 过零方波:由电压过零检测电路得到的波形.其上升与下降沿分别比实际交流电压零点有ta与tb的延迟;
(3) 继电器动作指令:高电平表示接通.微处理器得到此信号后开始准备发出操作指令;
(4) 继电器线圈通电状态:此图为磁保持继电器的 “接通线圈”通电状态;
(5) 继电器触点状态:高电平表示接通.
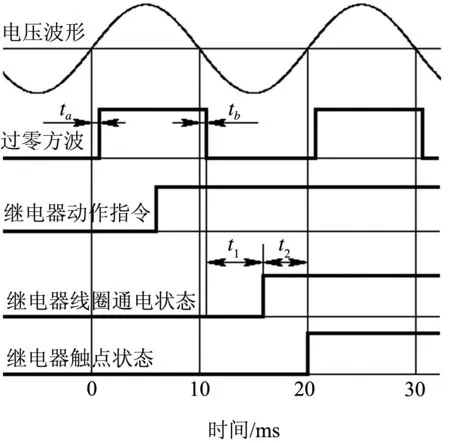
图2 投切动作时序图
微处理器接到投切的指令后,从下一个电压零点(图2中是从10 ms坐标处过零点方波的下降沿,即实际零点延迟tb时间后)开始,延迟t1时间后,给继电器线圈通电.t2是继电器的动作时间,即线圈通电t2时间后,继电器触点才闭合.t1是微处理器的延迟时间,计算公式为:
t1=10-tb-t2
(1)
式(1)对应的是过零点方波取下跳沿时的情形.如果是上跳沿,则式(1)中的tb用ta代替即可.
3 影响投切精度的因素分析
由图2及式(1)可知,微处理器从收到过零信号开始,要延时t1时间再驱动继电器动作.而t1的计算公式中有3个变量会影响其精度.一是过零方波的延迟时间ta与tb,二是继电器的动作响应时间t2,三是交流电的半周期10 ms.这三个变量值本身并不重要,而重要的是其重复误差.变量值本身是系统误差,可以通过计算来补偿,但重复误差却无法补偿.因此,下面重点分析这三个变量的重复误差对总精度的影响程度.
3.1 过零信号的精度分析
过零检测电路有多种形式,从波形的角度来讲,大致有两种形式.一种是图2所示的,由交流电压波形经电压比较器直接生成过零方波.交流电压正半周对应高电平,负半周对应低电平.第二种是先将交流电整流为单向脉动波,再用电压比较器生成过零脉冲.第二种形式,额外增加了一个整流环节,理论上只能增大误差.因此设计时,不建议用这种形式.
过零检测电路的构成通常有二极管、光电耦合器、电压比较器、运算放大器等各种元器件的组合.电路方案决定了选用的器件,对检测精度有很重要影响.最后的输出波形无论是过零方波,还是过零脉冲,总要产生一定延迟误差.以图2中的ta与tb来讲,其值的大小并不重要,只要重复误差小,对计算t1的精度影响就小.所以说,过零检测电路的设计要以尽量减小重复误差为设计原则.或者说,以过零方波的稳定性为主要考虑指标.
经实验验证,如果用普通整流二极管构成的整流桥来整流,重复误差会明显增大.如果电路中采用了普通光电耦合器,会产生较大的随机重复误差.这两类器件的重复误差许多情况下会超过100μs.仅这一处误差,就会使时间综合误差控制在100 μs之内的指标无法实现.就是说,过零检测电路不应采用有普通二极管或光电耦合器的设计.当然,用二极管做钳位保护不算.一些相关文献中的过零检测电路,都采用了普通二极管或光电耦合器,例如文献[3]与[4],其过零信号精度实际上就不能得到保障.即使采用运算放大器或电压比较器,不同型号、不同厂家的产品效果也各不相同.图3为采用特别选择的LM311电压比较器设计的过零检测电路,经实验测试,其过零方波对应图2中的两个延迟时间分别为:ta=20 μs,tb=5 μs.重复误差可控制在1 μs之内[7],相对于100 μs的误差指标来讲,此误差基本可以忽略不计.
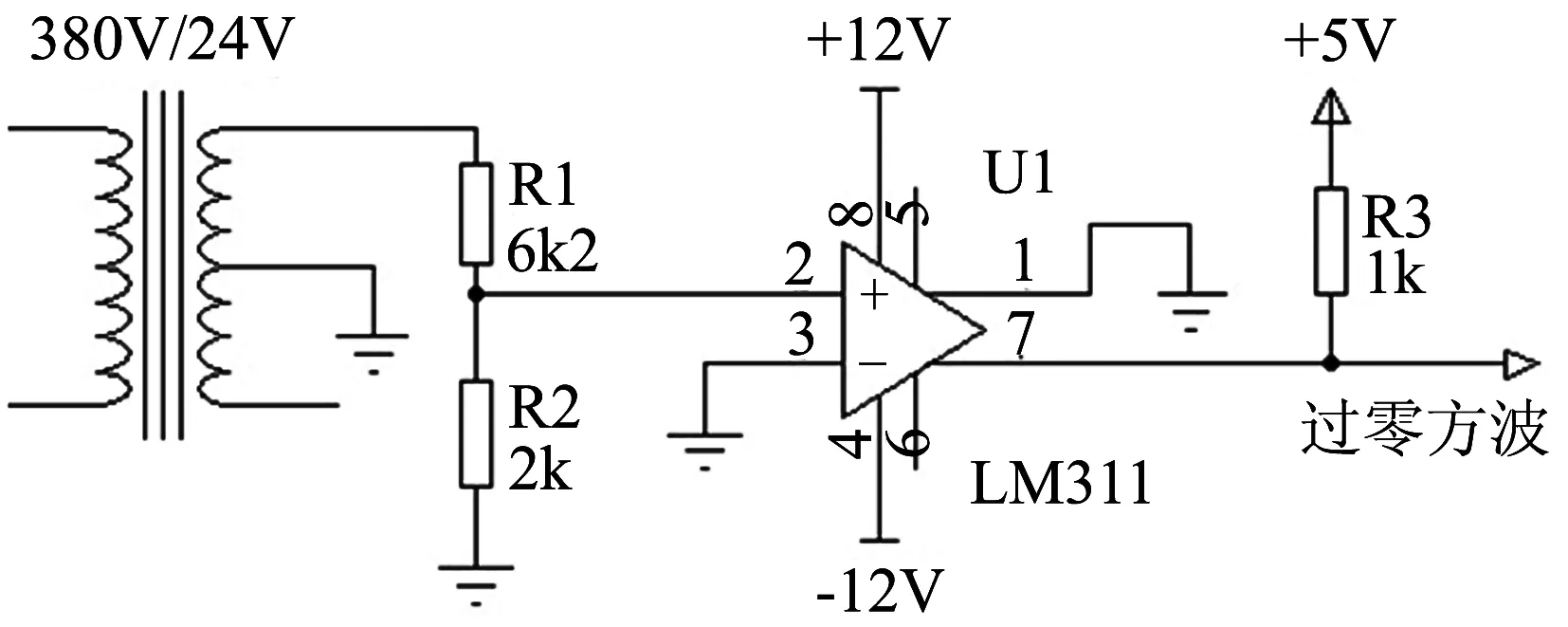
图3 典型过零检测电路
由图3的例子可见,过零脉冲的两个延迟时间ta与tb差距还是挺大的.如果采用过零脉冲的信号形式,即使整流电路采用了运放组成的绝对值电路,要保证交流电正负两个半波对应的信号脉冲的时间对称性,设计难度会提高很多.如果保证不了脉冲的时间对称性,就相当于把ta与tb当做同一个参数来处理,肯定会带来一定误差.
有些电路比图3电路的延迟误差可能更小,但如果重复误差较大的话,也不行.设计电路时要充分注意这一点,控制重复误差才是关键.
3.2 继电器动作时间精度分析
磁保持继电器的动作时间稳定性相对普通继电器要更好.动作速度比较快的,动作时间一般在3~6ms之间.例如,双线圈的HFE22型磁保持继电器,触点容量440VAC/100A.其接通时间约为4 ms.
要保证最终控制精度,重要的是动作时间的重复误差.影响动作时间重复误差的因素,除了继电器本身的机械结构特性之外,驱动电压、驱动时间都有影响.通过对HFE22型磁保持继电器用不同的驱动时间,得到了表1的实验结果.实验条件为:驱动电压:24 V;动作间隔时间:1 s;环境温度:20℃;闭合/断开次数:每种动作50次.
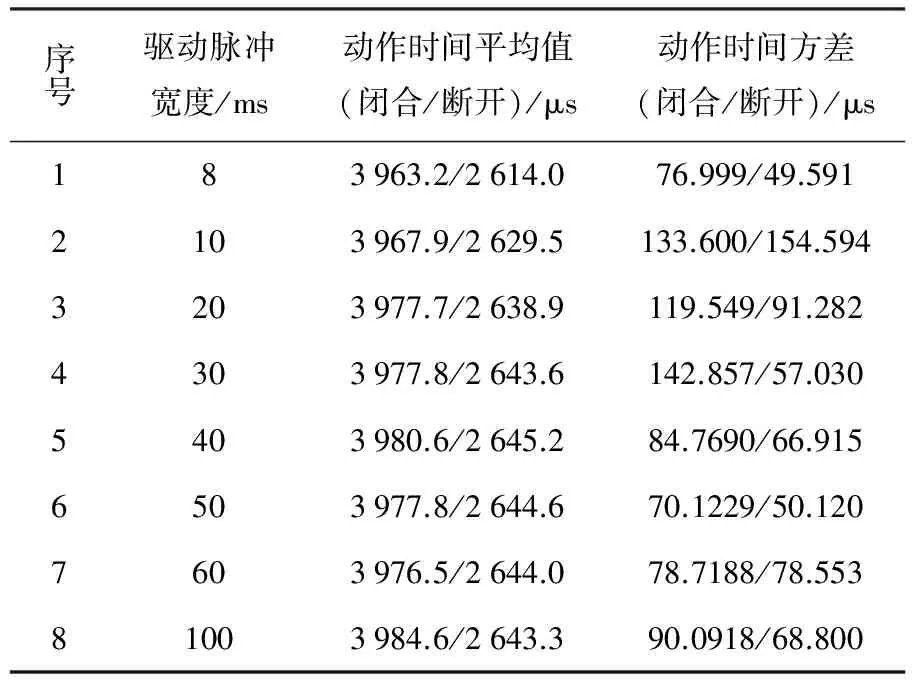
表1 不同驱动脉冲宽度继电器动作时间实验结果
由表1可见,当驱动脉冲宽度为50 ms时,动作重复误差最小.在此条件下,记录的闭合最慢动作时间为3 994 μs,最快为3 968 μs,闭合最大误差时间为26 μs.断开最慢动作时间为2648 μs,最快为2627 μs,断开最大误差时间为21 μs.
影响动作时间的另一个因素是驱动电压.例如当供电电压为23.5 V时,50次闭合时间平均值为4 014 μs.当供电电压为24.5 V时,50次闭合时间平均值为3 923 μs.时间差为91 μs.可见电压影响相当大,因此,必须用稳定的直流电源来驱动,使电压的影响减到最小.
影响动作时间的还有温飘与时飘等因素,虽然变化缓慢,但影响却不能忽略,计算最终精度时必须考虑进去.
3.3 交流电周期时间误差分析
发电厂的发电机转速为3 000 r/min,行业规定发电机转速误差必须小于±2 r/min,由此可知,发电厂的发电机转数在2 998~3 002 r/min之间.相当于49.967~50.033 r/s之间,对应的交流电频率在49.967~50.033 Hz之间.由此可得,其周期为19.987~20.013 ms,最大误差为±13 μs.因此半周期10 ms的最大误差为±6.5 μs.
由于发电机的运转有较大的机械惯性,因此其转速即使有变化也是缓慢的,±6.5 μs 的误差也较小,因此可将其影响归于温飘与时飘一类来考虑.
4 投切精度综合分析
由式(1)引出的对过零检测延迟误差、继电器动作时间误差、交流电周期时间误差等三个变量误差的分析可见,主要误差是继电器的动作时间误差.但最大26 μs的动作时间误差似乎很小,比前面提出的综合误差控制在100 μs内的要求相对照,似乎很容易满足.但事实并非这么简单.
通过对继电器动作时间的进一步实验分析发现,表1的实验数据并不能真实反映继电器的动作时间误差.原因是之前提到的温飘与时飘因素影响其实相当大.表1的实验是按每秒一次的稳定速度连续动作的结果.如果将动作间隔时间随机化,特别是间隔24 h之后再动作,会发现动作时间变化相当大,有几十甚至会超过100 μs,或者更大.图4所示是这种变化特点的示意图.
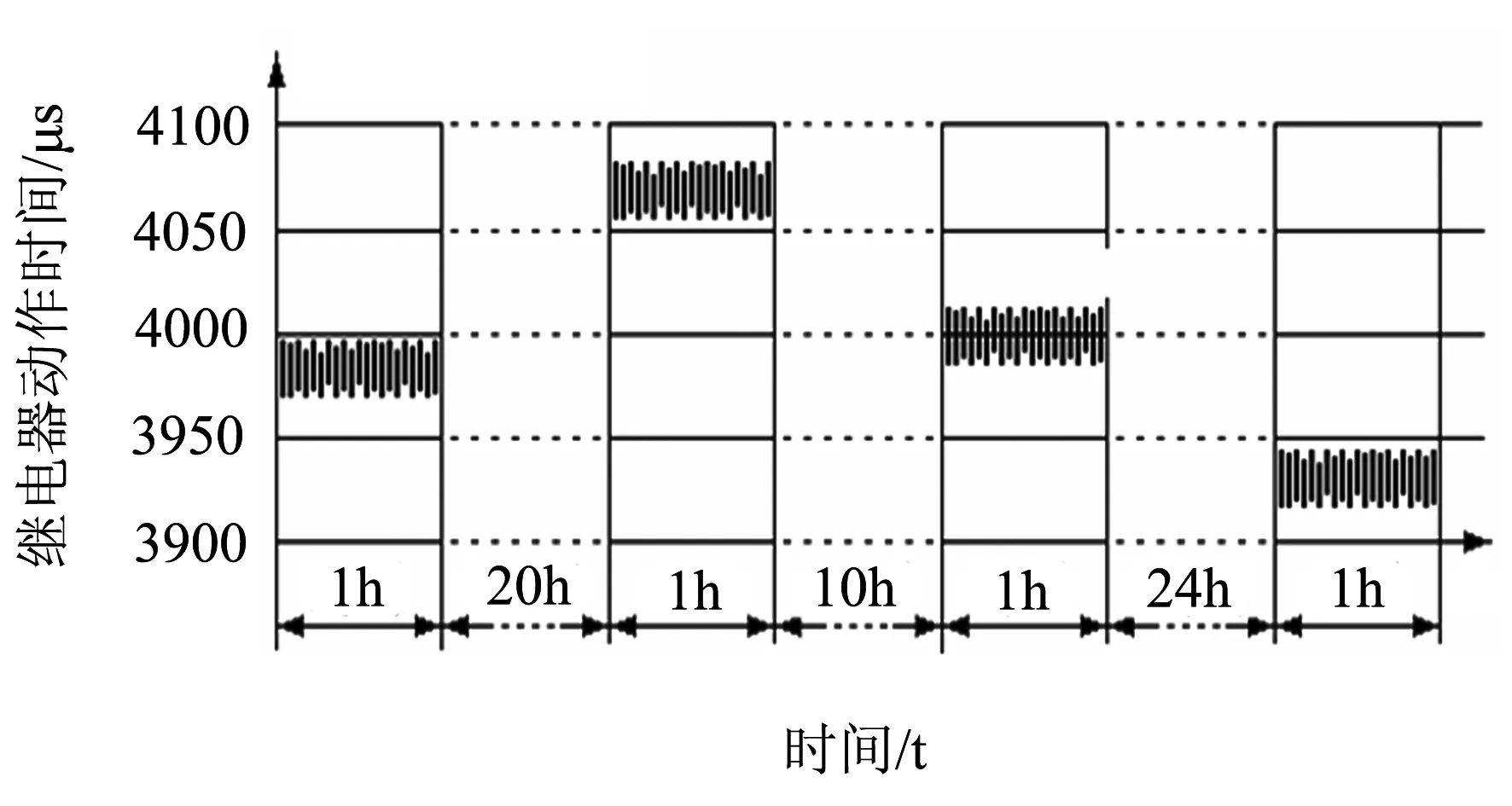
图4 继电器动作时间漂移性变化示意图
这种变化,具有温飘与时飘的特点,变化比较缓慢,而随机重复误差并未产生多少变化.因此,这类漂移误差是可以通过补偿算法予以修正的.但前提是必须有实际动作时间的测量反馈电路,来获得继电器的实际动作时间.
考虑到实际工况的复杂性,春夏秋冬温度、湿度的不同,交流电压、频率的变化,继电器触点的逐渐损耗,温飘时飘等诸多因素影响,要保证长期工作的投切时间误差控制在100 μs之内,实属不易.如果不增加动作时间反馈,可以说是几乎是不可能的.
增加过零投切误差时间测量反馈之后,可以利用软件技术,补偿绝大部分由温飘、时飘,以及继电器动作时间的不确定性渐变漂移.最终投切时间误差基本可以控制在100 μs之内,效果相当不错.要保证测量反馈的准确度,反馈环节的设计也有一定难度,但限于篇幅与文章主题,此处不再赘述.
5 结论
为提高同步开关的设计精度,本文给出以下设计建议:
(1)过零检测电路尽量采用过零方波输出形式,减少整流环节.如果要整流,要采用运放组成的绝对值电路来实现.避免使用普通二极管与光电耦合器等重复误差大的器件;
(2)选择动作时间重复误差小的磁保持继电器,选择合适的驱动电压,并严格保证电压的稳定.还要选择合适的驱动时间,保证驱动时间的一致;
(3)增加继电器过零动作时间误差反馈环节,用于补偿控制系统,特别是磁保持继电器的温度漂移、时间漂移等.短时间内的精度要靠电路与软件保证,反馈环节提供的投切误差信息,用于调节控制参数,补偿修正漂移性渐变导致的投切误差.
参考文献:
[1]王砼,陈丽安,刘涛. 低压智能电容器自适应过零投切技术的研究[J]. 电器与能效管理技术,2014,17:10-14,25.
[2]张胜雷,段毅,王沙,等. 新型电容器投切开关设计——智能同步开关[J]. 电工文摘,2015(2):17-19.
[3]祁晓蕾,沈雷明. 一种低压无功补偿的智能同步开关技术[J]. 民营科技,2014(12):56-57.
[4]陈杏灿,程汉湘,彭湃,等. 基于永磁真空开关的无功补偿装置的设计[J]. 电力电容与无功补偿,2016,37(3):10-14.
[5]周飞勇. 无功补偿装置“同步开关”投切元件浅析[J]. 科技创新与应用,2013,23:10-11.
[6]杨建宁,成小瑛. 基于单台三极同步开关的智能型无功补偿装置[J]. 电力电容与无功补偿,2014,35(2):24-28.
[7]邹强.基于单片机控制的交流电选相开关控制器设计[D].大连:大连交通大学,2014.
