基于航拍图像的输电线检测方法
2018-04-18沈潇军姚一杨琚小明
陈 建,沈潇军,姚一杨,刘 雄,琚小明
(1.国家电网浙江省电力公司信息通信分公司,浙江 杭州 310007;2.华东师范大学 计算机科学与软件工程学院,上海 200062)
0 引 言
随着国家电网投资规模的不断扩大,网络结构越来越复杂,电网巡视和维护的工作量巨大[1],传统的输电线路和变电站人工巡视操作方式已经满足不了高效的电网巡检工作要求。为此,国家电网公司大力推广无人机线路巡检[2-5]。由于航拍图像背景为复杂多变的自然背景,直接对航拍图像进行输电线的检测会产生很高的误检率和漏检率。
为了减弱背景噪音对输电线目标的干扰,近年来国内对航拍图像中检测输电线进行了多种方法的研究,赵利坡等[6]通过对输电线目标进行基于方向约束的线状目标增强以抑制竖直方向的干扰物体和其它非线状背景和噪音,通过Radon变换引入识别因子来去除水平干扰物体,但是该方法约束条件苛刻,只能识别近似水平方向的输电线,局限性较大。曹蔚等[7]用方向滤波的结果进行自相关增强能在大幅减弱航拍图像中复杂环境背景的同时增强电力线目标,有效提高图像的电力线目标检测识别率。但是算法效率和增强效果依赖于迭代次数,需要人工控制迭代次数才能达到最佳效果。黄东芳等[8]利用搜索聚类提取像素点并结合形态学处理像素点去除图像中的背景噪音。用阈值区间的自适应估算方法来计算Hough变换的参数阈值,从而识别出图像中的输电线。然而,参数阈值的选取流程复杂,耗时长而且在对比度较低的情况下识别效果差。
针对以上这些方法应对复杂背景环境时存在的不足,本文在前人在输电线检测的研究为基础,结合大量航拍图像实例和输电线特征设计出航拍图像中输电线的简化模型图,确定输电线区域边界,对输电线区域进行划分并得到分割系数。消除了非输电线区域的背景噪音,并对输电线区域内线间距离进行计算删除不符合要求的线状物,减少随机Hough变换中参数空间遍历所需时间,同时降低了误检和丢失输电线目标的概率。
1 图像预处理
对航拍图像进行分析处理,有着准确性,实时性,鲁棒性的要求。在分析航拍图像之前必须对其进行预处理,从而达到增强输电线特征,减少背景干扰的目的。
图像预处理最常见方法有Canny算子边缘检测方法[9],Canny方法具有较高的检测精度和较多的应用场景[10],由于Canny算子对噪声比较敏感,不适用于复杂背景下输电线边缘检测。而Hessian矩阵方法[11,12]已经被大量应用于图像中线状目标的增强,相比于Canny方法本文用Hessian方法来对航拍图像进行增强预处理并提取所有边缘点,对于二维图像,Hessian矩阵为
(1)
Hessian矩阵描述了不同方向上灰度梯度的变化,通过Hessian矩阵求取对应像素点的特征值和特征向量。
2 改进的随机Hough变换输电线检测方法
2.1 标准Hough变换和随机Hough变换
标准Hough变换定义请参见文献[13],其基本思想使用点-线对偶性,使得整体检测问题转换成局部检测问题。
避免垂直直线斜率无限的问题,一般采用直线的极坐标方程
ρ=xcosθ+ysinθ
(2)
式中:ρ为直角坐标系原点到直线的距离,θ为直线与x轴的夹角。
图1有一组点位于同一直线上,每个点对应了参数空间中的一条正弦曲线,这些曲线在极坐标系有共同的交点。先设定一个累加器组A[θ,ρ],初始值为0,对每一个像素点(xi,yi)进行遍历θ的取值,计算对应的ρ,若其值对应累加器组某一个值,则该累加器加1,直到遍历完所有像素。
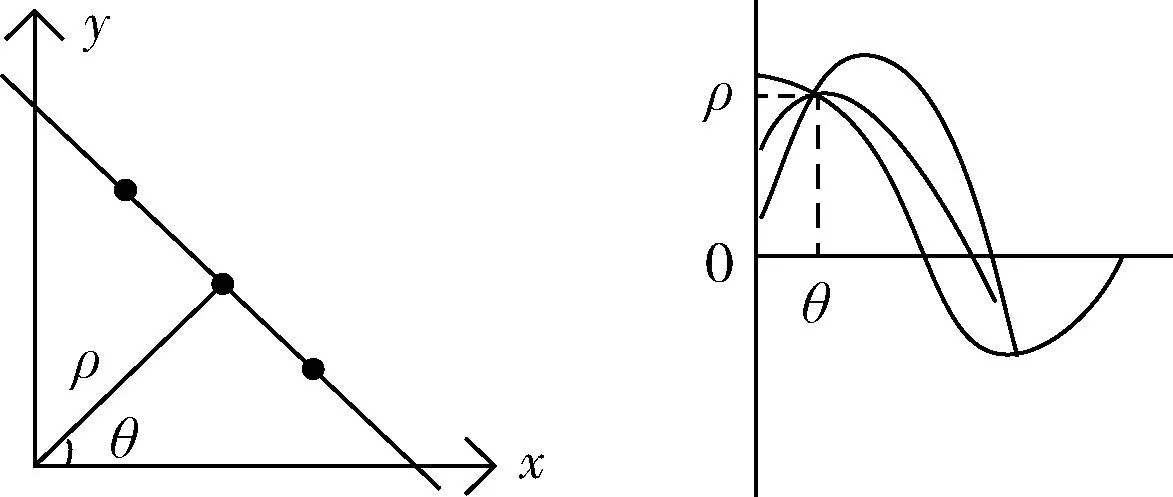
图1 极坐标方程下的点-线对偶
由于标准Hough变换对图像中每个像素都进行映射,计算复杂度较高,不适合无人机航拍图像的处理。基于概率统计的随机Hough变换的基本思想参见文献[14,15],通过多对一的映射方式,避免了标准Hough变换中一到多映射所需的庞大计算量,但是依然存在无效累计的问题,在复杂场景下容易检测出虚假输电线或漏检输电线。
经过我们的大量无人机航拍图像统计分析,80%以上的航拍图像中输电线只占整个不到40%的区域。但是随机Hough变换没有考虑输电线检测中输电线会集中在一块区域,在整个图像空间中随机取点会浪费大量时间并引入非输电线区域的背景噪音。
2.2 改进的随机Hough变换
本文针对随机Hough变换方法进行改进,提出一种基于区域分割的随机Hough变换方法。其主要思想是根据输电线在图像中区域分布特点,将含有输电线区域边界进行标记并划分出输电线区域,并通过输电线平行且成对出现的特征引入斜率判断机制来减小虚假峰值检测带来的误检,从而改善输电线检测的速度和效果。
通过统计分析大量无人机航拍图像,发现60%以上的航拍图像有以下特点:①航拍图像中输电线的拓扑结构都是直线,并且穿过图像;②输电线都是互相平行,而且输电线之间的距离都是固定的;③输电线的宽度大约是1到2个像素点;④输电线一般情况下都是成对出现的。根据以上描述的4个特点可以设计出相应的航拍图像中输电线简化模型S。航拍图像中输电线符合上述4个特点即可适用该模型。如图2所示,L1,L2,L3,L4分别为4根输电线,输电线之间的距离为d1,d2,abcd分别为输电线区域边界端点,输电线区域S′即为abcd为顶点形成的四边。

图2 航拍图像中输电线的简化模型S
接下来介绍输电线区域划分和模型生成过程:经由Hessian预处理后的航拍图像已经检测到图像中包括输电线目标在内的所有边缘信息。因为输电线在图像中总是从图像一端横穿到另一端,所以从图像边界开始搜索,以边界为搜索的起点。划分输电线区域有以下3个步骤:
(1)首先从上至下搜索,先垂直方向分块,将整个图像从左到右分成8块,形成8个宽度相同像素条,如图3所示,上边界为起点垂直方向向下开始搜索。然后在这个像素条内搜索线段的边缘信息,使用子线性算法[17]找到第一个最长的线状物边缘,即为L1的部分片段,然后继续向下搜索,依次找到L2,L3,L4片段。线段之间最大间距为d2,最小间距为d1。寻找到L4片段后继续搜索直到图像下边界,发现大于d2间距也就是虚线L6所在位置时就没有线段片段存在。对虚线L6位置进行标记,即为第一个像素条内输电线区域下边界。

图3 输电线区域划分时像素条分块
(2)接着从下至上搜索,以下边界为起点,沿着垂直方向向上开始搜索。第一个找到的为L4部分片段,依次找到L3,L2,L1片段。寻找到L1片段后继续向上搜索直到图像上边界,同样发现大于d2间距也就是虚线L5所在位置时就没有线段片段存在。对虚线L5位置进行标记,即为第二个像素条内输电线区域的上边界。
(3)拼接全部像素条的输电线区域上下边界,即可得到abcd这4个顶点包围的完整输电线区域S′。
输电线区域划分后就可以得到d1,d2和输电线区域面积相关参数值,从而构成符合该图像的特定简化模型。

区域分割系数
(3)
考虑一根输电线由n个像素组成,对随机取样两个像素的一次实验中,在参数空间图像中检测到该输电线的概率为Pc;
随机Hough变换方法
(4)
本文改进方法
(5)
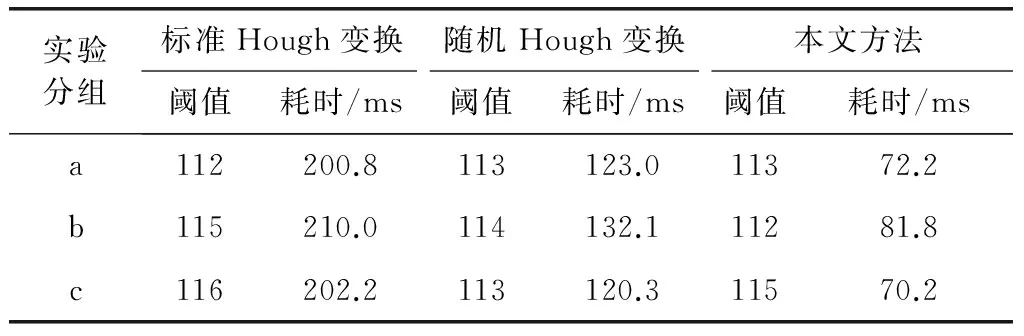
由于区域分割系数0 M次实验后,检测到输电线的次数是二项分布中的变量ξ (6) 则k0次实验丢失该输电线的概率为Pmiss (7) 由于Pc增大,Pc(ξ=k)变小,所以Pmiss相对就变小了。 考虑一根误检的输电线由m个像素构成,对随机取样两个像素的一次实验中,在参数空间图像中检测到该输电线的概率为Pr; 随机Hough变换方法 (8) 本文改进方法 (9) M次实验后,检测到输电线的次数是二项分布中的变量ξ (10) 则k0次实验误检该输电线的概率为Pfalse (11) 由于Pr增大,Pr(ξ=k)变小,所以Pfalse相对就变小了。 本文首先结合实践情况构建出航拍输电线简化模型图,通过模型图描述确定输电线区域边界,限定输电线区域。通过计算得出区域分割系数,将大量无关输电线信息的背景噪音从航拍图像中分离,从而将参数空间中遍历像素的数量大大减少,提高了输电线检测速度,并降低了输电线目标丢失和误检的概率,提高了输电线目标检测的概率。 本文使用改进的随机Hough方法对航拍图像进行处理后,虽然减少了非输电线区域背景噪音带来的干扰,但还是存在虚假峰值检测的问题。 如果设定的阈值为88,如果有3个阈值大于88的累加单元,这3个累加单元将被检测成3条输电线从而造成误检现象。本文利用输电线成对出现而且平行的特性,可以对检测的直线进行斜率对比以及直线之间距离进行计算处理,淘汰不符合要求的输电线,从而大大降低了因为虚假峰值检测导致的输电线误检。 取直线上任意两点(xm,ym)和(xn,yn),其中 (12) 任意两条平行直线Ax+By+C1=0和Ax+By+C2=0,距离 (13) 输电线检测算法流程如下: 输入:航拍图像的二值图像 输出:输电线被标记出来的二值图像 步骤1建立图像空间,参数空间; 步骤2确定输电线区域边界,计算出区域分割系数,划分输电线区域和无关区域; 步骤3将输电线区域参数空间离散成一个累加器阵,将图像中每个点映射到参数空间对应的累加器中; 步骤4检测累加器阵局部最大值,得到对应参数,并通过预设阈值保留所有候选输电线; 步骤5计算出所有候选输电线的斜率,针对不同斜率值进行统计计数,保留计数最多的输电线; 步骤6计算平行输电线之间的相互距离,与图2中4个数值中任何一个的方差小于0.01,则保留该输电线。 为了验证本文提出的基于改进随机Hough变换检测航拍输电线的图像检测效果和所需时间。实验平台为Win10操作系统下,Visual Studio 2012+OpenCV 2.4.13。本文选取3组无人机航拍图像,首先用Canny算子边缘检测方法和Hessian方法分别对3组图像进行预处理,然后采用标准Hough变换算法、随机Hough变换算法和本文改进的随机Hough变换方法,分别从检测效果和所需时间进行了比较。 本实验采用了abc三组不同复杂背景下无人机航拍输电线的图像,图像分辨率为620*810。分别使用Canny方法和Hessian方法作用于航拍图像,其实验效果如图4所示。从图4中3组整个效果上看,Canny方法检测出大量背景边缘线,部分输电线被边缘线覆盖,影响检测效果。 图4 Canny方法和Hessian方法边缘检测效果 使用Hessian方法对实验图像进行增强,第一组和第三组都得到较好的边缘点,第二组因为背景最为复杂和背景中田地的干扰,增强效果不如第一组和第三组。但是都对输电线的线状特征进行了增强,并对复杂的自然背景做了平滑处理,去除了部分森林树木的干扰信息,有利于下一步算法检测出图像中的输电线。 3组实验图像经过Hessian方法预处理后,输电线目标得到了一定程度的增强。在预处理的基础上,对3组图像分别使用标准Hough变换,随机Hough变换,以及本文改进的随机Hough变换方法,其实验效果如图5所示。 图5 传统方法和本文方法效果对比 图5中,第一组中田地和树木信息较多,传统Hough变换进行输电线检测时检测出大量背景噪音,尤其是输电线目标与森林背景重合的地方出现输电线边缘部分模糊不清,随机Hough变换虽然在一定程度上减少了输电线附近田地带来的噪音,但是依然会影响整体输电线检测效果,本文方法很好地过滤了输电线附近的背景噪音,提取的输电线线段连贯完整,整体检测效果优于标准Hough变换和随机Hough变换。第二组中相对于第一组和第三组背景噪音最为复杂,不管是传统Hough变换和随机Hough变换,检测出田地和小茅屋圆顶部分产生大量干扰信息,部分干扰信息与输电线混杂在一起,严重影响了输电线检测效果,而且输电线部分多处发生断裂,本文方法中圆顶和田地信息被弱化从而抑制背景噪音,虽然输电线目标清晰度有一定程度的减弱,但是输电线目标依然清晰的被识别,检测效果整体优于标准Hough变换和随机Hough变换。第三组中输电线尾部被田地土壤信息干扰严重,标准Hough变换和随机Hough变换检测出的尾部和背景的田地土壤信息相互干扰导致边缘信息不完整,无法很好识别输电线,本文方法中输电线尾部信息边缘与田地土壤分离并弱化田地信息,虽然导致尾端检测效果不如输电线其它部分,但整体检测效果依然优于标准Hough变换和随机Hough变换。 本实验中采用的硬件平台如下:CPU为i7-3520M,主频2.9 GHZ,内存8 GB,以3种方法检测直线所需时间来评估其性能,表1列举了3种不同的方法在检测输电线的耗时以及检测输电线时的阈值。在阈值接近的情况下,a组中,本文方法检测输电线时间是标准Hough变换的35%,是随机Hough变换的58%。b组中,本文方法检测输电线时间是标准Hough变换的38%,是随机Hough变换的61%。c组中,本文方法检测输电线时间是标准Hough变换的34%,是随机Hough变换的58%。这说明在背景复杂的航拍图像中,本文提出的方法能够有效地减少输电线检测所需时间,提高了输电线检测性能。 表1 输电线检测的3种方法实验结果对比 针对传统Hough变换方法检测输电线耗时太久,随机Hough变换方法丢失和误检输电线概率偏大的问题,提出一种基于区域分割的改进随机Hough变换方法,通过区域分割系数将输电线区域和非输电线区域分割,减少背景噪音干扰,然后通过输电线间距减少虚假峰值带来的影响。实验结果表明,所提出的方法适合无人机在野外森林植被复杂的自然环境下进行输电线巡检,不仅能够更准确地检测出航拍图像中的输电线,同时减少检测时间,能够快速有效地检测出航拍图像中的输电线,具有一定的实用性。 参考文献: [1]QIN Qin,GUO Qiang,ZHOU Qinyong,et al.The security and stability of power grids in 13th five-year planning and countermeasures[J].Electric Power,2015,48(1):25-32(in Chinese).[覃琴,郭强,周勤勇,等.国网“十三五”规划电网面临的安全稳定问题及对策[J].中国电力,2015,48(1):25-32.] [2]TANG Mingwen,DAI Lihao,LIN Chaohui,et al.Application of unmanned aerial vehicle in inspecting transmission lines[J].Electric Power,2013,46(3):35-38(in Chinese).[汤明文,戴礼豪,林朝辉,等.无人机在电力线路巡视中的应用[J].中国电力,2013,46(3):35-38.] [3]PENG Xiangyang,CHEN Chi,RAO Zhangquan,et al.Safety inspection and intelligent diagnosis of transmission line based on unmanned helicopter of multi sensor data acquisition[J].High Voltage Engineering,2015,41(1):159-166(in Chinese).[彭向阳,陈驰,饶章权,等.基于无人机多传感器数据采集的电力线路安全巡检及智能诊断[J].高电压技术,2015,41(1):159-166.] [4]DENG Rongjun,WANG Bin,XIONG Dian,et al.A path planning for power transmission lines inspection with unmanned aerial vehicle based on genetic-pattern searching algorithm[J].Computer Measurement & Control,2015,23(4):1299-1301(in Chinese).[邓荣军,王斌,熊典,等.基于遗传算法的输电线路无人机巡检路径规划[J].计算机测量与控制,2015,23(4):1299-1301.] [5]YANG Chengshun,YANG Zhong,GE Le,et al.Transmission line intelligent inspection system based on multi-rotor unmanned aerial vehicle[J].Journal of University of Jinan(Scie-nce and Technology),2013,27(4):358-362(in Chinese).[杨成顺,杨忠,葛乐,等.基于多旋翼无人机的输电线路智能巡检系统[J].济南大学学报(自然科学版),2013,27(4):358-362.] [6]ZHAO Lipo,FAN Huijie,ZHU Linlin,et al.Research on real-time detection and recognition algorithm of high-voltage transmission line for inspection with unmanned aerial vehicle[J].Journal of Chinese Computer Systems,2012,33(4):882-886(in Chinese).[赵利坡,范慧杰,朱琳琳,等.面向巡线无人机高压线实时检测与识别算法[J].小型微型计算机系统,2012,33(4):882-886.] [7]CAO Weiran,ZHU Linlin,HAN Jianda.An iterable multidirectional autocorrelation approach for aerial power line image enhancement[J].Robot,2015,37(6):738-747(in Chinese).[曹蔚然,朱琳琳,韩建达.一种可迭代基于多向自相关的航拍电力线图像增强方法[J].机器人,2015,37(6):738-747.] [8]HUANG Dongfang,HU Guiming,ZHOU Yang.Extraction and recognition of transmission line based on an improved Hough transform[J].Computing Technology and Automation,2016,35(3):50-53(in Chinese).[黄东芳,胡桂明,周杨.基于一种改进的Hough变换的输电线提取与识别[J].计算技术与自动化,2016,35(3):50-53.] [9]XU Hongke,QIN Yanyan,CHEN Huiru.An improved algorithm for edge detection based on Canny[J].Infrared Techno-logy,2014,36(3):210-214(in Chinese).[许宏科,秦严严,陈会茹.一种基于改进Canny的边缘检测算法[J].红外技术,2014,36(3):210-214.] [10]LIU Qingmin,ZHANG Lei,LI Xue.Chip image edge detection based on improved Canny algorithm[J].Computer Engineering and Design,2016,37(11):3063-3067(in Chinese).[刘庆民,张蕾,李雪.基于改进Canny的芯片图像边缘检测算法[J].计算机工程与设计,2016,37(11):3063-3067.] [11]Zhang Z,Su X,Ding L,et al.Multi-scale image segmentation of coal piles on a belt based on the Hessian matrix[J].Particuology,2013,11(5):549-555. [12]Lefkimmiatis S,Bourquard A,Unser M.Hessian-based norm regularization for image restoration with biomedical applications[J].IEEE Trans Image Process,2012,21(3):983-995. [13]Baker L,Mills S,Langlotz T,et al.Power line detection using Hough transform and line tracing techniques[C]//International Conference on Image and Vision Computing.New Zealand:IEEE,2017. [14]Mukhopadhyay P,Chaudhuri BB.A survey of Hough transform[J].Pattern Recognition,2015,48(3):993-1010. [15]QIAO Yinqi,XIAO Jianhua,HUANG Yinhe,et al.Randomized Hough transform straight line detection based on least square correction[J].Journal of Computer Applications,2015,35(11):3312-3315(in Chinese).[乔寅骐,肖健华,黄银和,等.基于最小二乘修正的随机Hough变换直线检测[J].计算机应用,2015,35(11):3312-3315.] [16]CAO Weiran,ZHU Linlin,HAN Jianda.Fast line detection method applied in UAV high voltage line inspection[J].Application Research of Computers,2014,31(10):3196-3200(in Chinese).[曹蔚然,朱琳琳,韩建达.面向旋翼无人机的高压输电线在线检测方法[J].计算机应用研究,2014,31(10):3196-3200.] [17]Horev I,Nadler B,Arias-Castro E,et al.Detection of long edges on a computational budget:A sublinear approach[J].Siam Journal on Imaging Sciences,2015,8(1):458-483.2.3 输电线检测算法
3 实验结果与分析
3.1 两种方法预处理效果对比

3.2 3种输电线检测算法检测效果和性能对比

4 结束语
