多探头星敏感器分布式视场融合方法*
2018-04-18李新鹏任平川1原1宵1
李新鹏,任平川1,,高 原1,,杨 宵1,
(1.上海市空间智能控制实验室·上海·201109;2.上海航天控制技术研究所·上海·201109)
0 引 言
星敏感器是组成高精度姿态轨道控制系统的重要单机,其以恒星为参考基准,具有定位精度高、质量小、功耗低、高度自主,并且无姿态累积误差等优点,是目前所有姿态敏感器中精度最高的敏感器[1-3]。传统单探头星敏感器的滚动角精度一般比俯仰角和偏航角精度低1个数量级[4-5]。由于单探头星敏感器视场有限,导致观测矢量空间分布较密集,月光等杂散光会降低系统可靠性。为了克服以上不足,通常在航天器上安装2个或2个以上的星敏感器,它们独立工作,互为备份,提高了姿态测量的精度和可靠性[6]。
为了进一步改善星敏感器的性能,近年来国外出现了多视场星敏感器的概念[7]。针对多视场星敏感器,文献[8]采用了径向特征匹配的方法将不同视场的星图拼接成一幅大视场星图,再对融合后的星图进行识别;文献 [5]采用了星矢量融合的方法,将非基准头部的探测信息转换到基准头部下,进行星矢量融合,提高了光轴方向的姿态精度;北京航空航天大学叶生龙等提出了两种工作模式[9]:高精度工作模式和高更新率工作模式。在高精度工作模式下,星敏感器的三轴姿态精度一致;在高更新率工作模式下,将三探头星敏感器的数据更新率提高了3倍,但是无法解决三轴姿态角精度不一致的问题。
针对这一问题,本文以三探头星敏感器为例,提出了基于异步曝光的多探头星敏感器数据更新率提高方法。该方法是指在等时间间隔异步曝光模式下,将前一时刻曝光探头的观测信息通过配准算法与相邻曝光探头的观测信息进行时间配准,之后根据2个探头之间的安装关系,将相邻曝光探头的观测星矢量转换到同一基准坐标系下,进行星矢量级融合解算姿态四元数。最后通过仿真试验,验证了该方法的正确性和可行性。
1 分布式视场融合模型
文中以三探头星敏感器为研究对象,三探头星敏感器的各头部之间以一定夹角进行安装。根据探头是否同步曝光,可将多探头星敏感器视场融合模式分为集中式视场融合模式和分布式视场融合模式。
在集中式视场融合模式中,三探头同步曝光,仅需通过空间配准将三探头的探测信息统一到基准坐标系进行星矢量融合,曝光时序如图1所示。3个探头同步工作,高电平T1表示曝光读取时间,低电平T2表示曝光读取完成、传输星点质心数据并开始下一帧的曝光读取,曝光读取过程和星图处理过程是同步进行的。

图1 集中式融合时序示意图
图2所示为分布式视场融合模式时序示意图。该模式下星敏感器3个探头交替工作,曝光读取时间依次间隔T/3(T=T1+T2),仅从时序角度看,数据更新率即可提高为原来的3倍,达到3/THz。
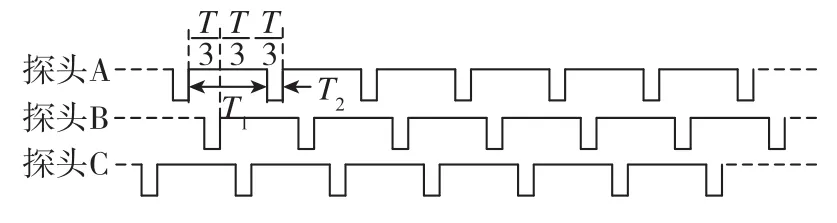
图2 分布式融合时序示意图
在分布式视场融合 (图3)中,假设探头A在T0+k T时刻曝光,探头B在T0+(k+1/3)T时刻曝光,探头C在T0+(k+2/3)T时刻曝光,k=0,1,2,…。将探头A第k帧的观测星矢量信息与探头B第k帧的观测星矢量信息通过线性插值进行时间配准,之后通过安装矩阵进行空间配准融合;同理将探头B第k帧的观测星矢量信息与探头C第k帧的观测星矢量信息配准融合;将探头C第k帧的观测星矢量信息与探头A第k+1帧的观测星矢量信息配准融合。以此流水线工作,解算姿态四元数。

图3 分布式视场融合示意图
2 转换矩阵
由于多探头星敏感器各探头的曝光时刻与观测坐标系不同,为了将各探头的探测信息融合解算姿态,必须统一时间基准与坐标系基准[10]。在时间配准中可用线性插值或Kalman滤波预测算法[11]。对于各头部之间的安装关系,在发射之前通过地面标校已经确定了初始值qAB、qBC和qCA,以其作为参考值。由于受航天器发射过程中的振动、空间热变形等因素的影响,各探头的安装关系并不是恒定不变的[12]。因此转换矩阵解算是否精准是影响多探头星敏感器精度的关键因素之一。
假设探头A第k帧筛选了A Nk颗星定姿星,定姿星在探头A坐标系下的观测星矢量为:,对应的导航星在天球坐标系下的参考矢量为:。同理,可得到探头B第k帧的观测星矢量为:,参考星矢量为:;可得到探头C第k帧的观测星矢量为:,参考星矢量为:。探头A的姿态四元数为,探头B的姿态四元数为,探头C的姿态四元数为。
以探头A、探头B为例,分析时间配准与空间配准。
2.1 时间配准
将探头A的定姿星进行时间配准到与探头B同步,得到的观测星矢量为:,在T0+(k+1/3)T时刻,探头A定姿星对应的导航星仍为:。由QUEST算法解算可得探头A坐标系下的姿态四元数为。将探头A在T0+k T时刻曝光得到的定姿星配准到T0+(k+1/3)T时刻,相当于进行了一次坐标转换。假设转换矩阵用四元数描述,则

2.2 安装矩阵
在T0+(k+1/3)T时刻,探头A坐标系到探头B坐标系的安装关系可由式 (2)表示

所以T0+k T时刻曝光的探头A的坐标系到T0+(k+1/3)T时刻探头B的转换关系可由式(3)描述

2.3 时间配准与空间配准合成
由式(1)可得

则由式(3)可推导如下:

该推导过程证明了先将探头A在T0+k T时刻曝光得到的定姿星观测矢量配准到T0+(k+1/3)T时刻,再通过AB之间的安装关系进行空间配准,与探头B进行星矢量融合等价于直接将探头A在T0+k T时刻曝光得到的定姿星矢量与T0+(k+1/3)T时刻曝光的探头B定姿星矢量做空间配准,星矢量融合。安装矩阵较准如图4所示。
为了提高安装矩阵的精度,需要设计滤波算法对q ABk进行滤波处理[2],本文不作为重点介绍。
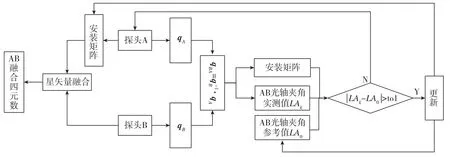
图4 安装矩阵校准示意图

3 星矢量融合
将不同探头坐标系下测得的星矢量通过头部之间的转换矩阵转换到基准头部坐标系进行星矢量融合。
由第2节可知,探头A和探头B第k帧融合观测星矢量为:。 由 转换矩阵,可由式 (7)解得探头A探测星点在基准探头B坐标系下的观测矢量:

探头A、探头B第k帧在探头B坐标系下的观测星矢量为:,,对应的导航星在天球坐标系下的参考矢量为:,,至此有了T0+(k+1/3)T时刻探头B坐标系下的观测星矢量和参考星矢量,可由QUEST算法解算探头AB的融合姿态四元数。
同理,探头B和探头C第k帧融合观测星矢量为:,。 由 转换矩阵,可由式 (6)解得探头B探测星点在基准探头C坐标系下的观测矢量:

探头B、探头C第k帧在探头C坐标系下的观测星矢量为:,对应的导航星在天球坐标系下的参考矢量为:。至此有了T0+(k+2/3)T时刻探头C坐标系下的观测星矢量和参考星矢量,可由QUEST算法解算探头BC的融合姿态四元数。
探头C第k帧与探头A第k+1帧的观测星矢量为:。由转换矩阵,可由式 (7)解得探头C探测星点在基准探头A坐标系下的观测矢量:
探头C第k帧、探头A第k+1帧在探头A坐标系下的观测星矢量为:,对应的导航星在天球坐标系下的参考矢量为:。至此有了T0+(k+1)T时刻探头A坐标系下的观测星矢量和参考星矢量,可由QUEST算法解算探头CA的融合姿态四元数。
将AB、BC和CA融合姿态四元数,通过探头B、探头C和探头A与卫星本体的安装关系,转到同一参考基准坐标系下 (如卫星本体坐标系)流水输出。
4 仿真验证
4.1 试验参数与步骤
仿真采用的图像传感器为CMV4000,这是一款大分辨率的可见光APS探测器,具有较高的灵敏度。仿真光学系统的参数如表1所示。

表1 光学系统基本的成像参数
试验选用SAO J2000星表;三探头光轴之间的夹角分别设置为:AB为64.36°、AC为64.31°、BC为64.35°;曝光周期设置为100ms,以0.3(°)/s作姿态机动,星点质心定位误差为1/19像元。
仿真试验过程如下:
1)设置基本的成像参数如表1。
2)探头A、B、C间隔T/3异步曝光,采集视场内的探测星。
3)各探头分别筛选定姿星。
4)通过QUEST算法,各探头计算其对应坐标系下的姿态四元数。
5)计算非基准探头到基准探头的转换矩阵。
6)通过星矢量融合,流水线式融合相邻曝光的2个探头的星点信息,解算融合后的姿态四元数。
7)将AB、BC和CA的融合姿态四元数统一到参考基准坐标系下输出。
8)分析三轴姿态总误差来评判算法性能。
4.2 试验结果
在转换矩阵解算准确的情况下,探头A、B、C三轴姿态,探头AB、BC、CA融合误差以及三头融合误差曲线如图5(a)和图5(b)所示,横轴量纲为帧号,纵轴量纲为角秒。

图5 (a)未融合的三轴姿态精度
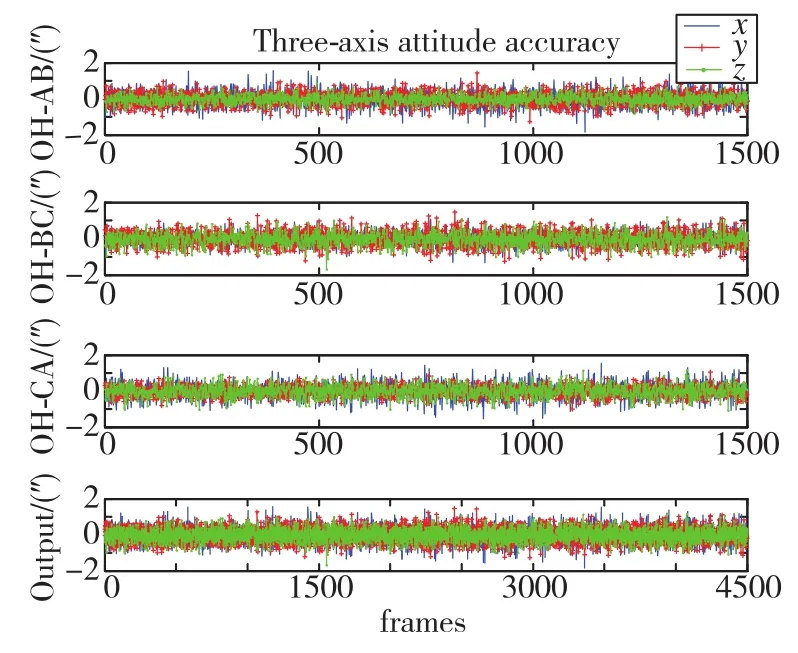
图5 (b)融合后的三轴姿态精度
由表2数据分析可知:异步曝光融合输出姿态相对于单头输出姿态,Z轴方向精度提高了8.17~8.82倍;X、Y轴方向精度与单头精度相当。由表2可知三轴精度处于相同量级,同时输出姿态的更新率是单头数据更新率的3倍。
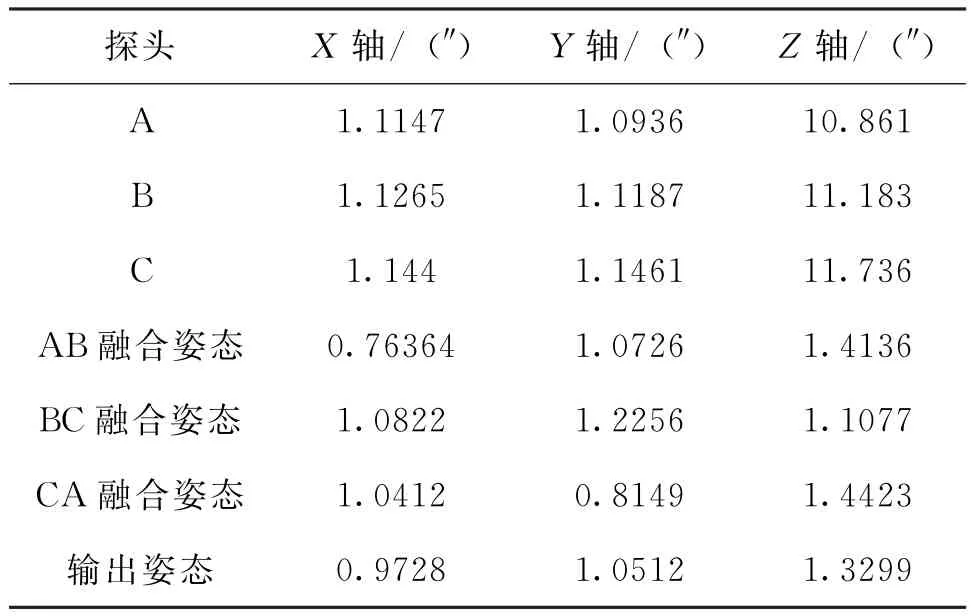
表2 三轴姿态角总误差
图6所示为融合前后赤纬角与旋转角误差,从曲线可以明显看出,融合前后赤纬精度基本相当;旋转角融合后较融合精度前明显提高。

图6 融合前后赤纬角与旋转角精度对比
5 结 论
分布式视场融合方法通过将异步曝光的3个探头中,相邻曝光的2个探头的观测星矢量做时间与空间配准,融合解算姿态,可解决单探头星敏感器光轴与平面内两轴姿态角精度误差量级不同的问题,相对于单探头星敏感器光轴方向精度提高了8~9倍。分布式的视场融合模式的设计,在保证三轴姿态角精度的基础上,相对于同步曝光的集中式融合方式,数据更新率提高了3倍。相对于集中式融合方式,在分布式融合过程中,参与融合的只有2个探头的测量信息,信息的传输时间缩短,融合解算过程耗时也能相对缩短;由此分布式视场融合相对于集中式视场融合,数据更新率可以提高3倍以上。
由仿真试验,验证了分布式视场融合算法相对于单探头星敏感器光轴方向精度提高了8~9倍,使三轴姿态角精度一致;相对于集中式融合的多探头星敏感器,可使数据更新率提高3倍以上。
