气力式无人机水稻撒播装置的设计与参数优化
2018-04-16宋灿灿,周志艳,姜锐等
0 引 言
中国幅员辽阔,不同地区地形地貌、种植习惯差异较大,对播种机具的设计要求也需要因地制宜[1]。据统计,中国泥脚深、雨水多、排水不畅的冷浸田是低产田的主要类型之一[2],目前约占低产稻田面积的44.2%,占全国稻田面积的15.07%[3];此外,沿海滩涂总面积达220万hm2[4];沼泽面积约1 100万hm2[5]。上述区域是潜在的耕地资源[6],但地面机械难以进入进行正常作业[7]。此外,在丘陵地区,由于地块面积小、高差大,大型地面播种机械难以行走,主要依靠小型播种机作业,费时费力[8]。
无人直升机体型小,操控灵活,可以实现航迹规划和自动导航飞行[9],不需要专用机场,可在田头灵活起降[10],不受地形地貌的限制,能够适应各种复杂的环境[11],能在地面机械和有人驾驶飞机难以企及的场所进行作业[12]。因此,利用无人直升机进行撒播可有效解决部分地区的机械化问题。
国内外已有采用无人直升机进行种子、肥料撒播的研究报道[13],国内珠海羽人、深圳高科新农等企业已开发出撒播无人直升机[14],证明了无人直升机撒播的可行性和实用性。但目前用于无人机挂载的撒播装置通常为离心圆盘式,该方式主要从地面播撒机械借鉴而来[15],在无人机上挂载使用存在以下不足之处:离心撒播的落种区为圆弧形,相邻的 2个落种区之间很容易产生重播和漏播,均匀性不好[16],且在作业幅宽方向上的调控比较困难,通常只适合用于施肥、飞播造林和飞播牧草等均匀度要求不高的粗播领域[17]。随着无人机技术的发展,无人直升机的载荷能力和续航时间有了很大的提高,目前装载量可达20 kg以上,作业时间也由原来的10 min左右提升至20 min以上(部分机型甚至更长),无人直升机撒播能够作为地面机械和有人驾驶飞机作业的有效补充,具有一定的实际应用价值。
为了探究适合无人机作业的撒播方式和撒播装置,改善无人机撒播作业的效果,以有效解决部分地区的种植机械化问题,本文拟提出一种较适合无人机高速撒播作业且均匀性较好的气力式撒播装置的设计方案,并对其关键部件进行仿真和样机测试验证,对影响撒播幅宽和均匀度的关键参数进行分析和优化,以期为样机优化制造提供参考。
1 气力式无人机撒播装置的工作原理
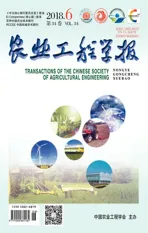
撒播装置的工作原理如图 1所示,气力式撒播装置主要由风机、分流箱、排种槽轮和导流通道组成。工作时,风机产生的高速气流经由入风口将落种口的种子颗粒吹入独立分开的导流通道,二者充分混合后,由气固混合出口排出。该装置主要利用排种槽轮调控种子颗粒的排量,利用风机产生的高速气流吹送种子颗粒,种子颗粒的撒播量和运动轨迹有较强的可控性。
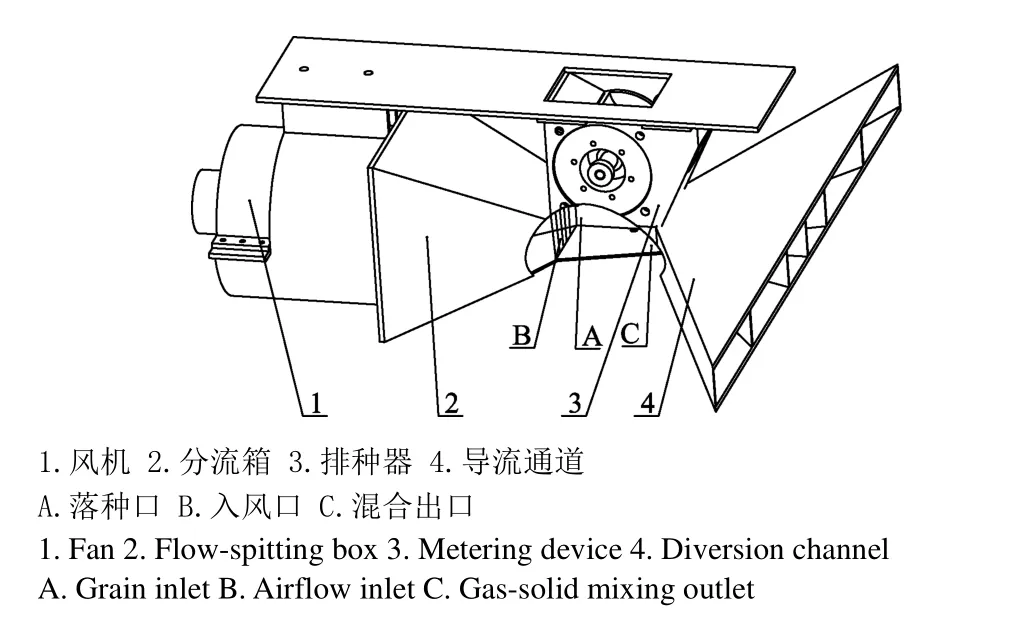
图1 气力式水稻撒播装置示意图Fig.1 Schematic diagram of pneumatic rice sowing device
作业中,撒播装置与无人机采用如下方式进行配合:根据无人机前进的速度和高度实时调整排种轮的转速和风机的风速,以此调整种子颗粒的亩撒播量和撒播幅宽,从而控制该航线上的撒播均匀性和幅宽的稳定性。为方便描述,便于进行参数的优选,后文的仿真分析及样机测试均以稻种作为撒播作业对象。
2 气力式无人机撒播装置关键部件的设计与仿真
2.1 无人机平台
2.1.1无人机机体结构
搭载该撒播装置的无人机为六旋翼无人机(广州天翔航空科技有限公司),最大任务载荷为 19 kg,机体结构如图2所示。
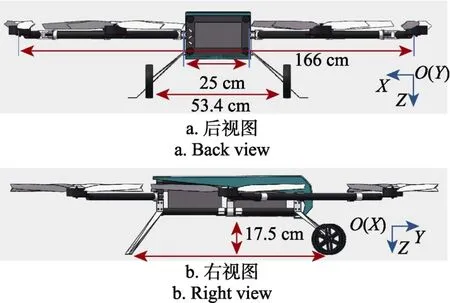
图2 无人机平台结构示意图Fig.2 Schematic diagram of unmanned aerial vehicle platform
2.1.2无人机风场仿真分析
无人机作业中下旋风场的分布对种子颗粒的运动轨迹有较显著的影响,为了获得撒播装置的较优结构参数及安装位置,对该机型的下旋风场进行模拟仿真。
根据标准的k-ε湍流模型[17],假设流体是不可压缩的连续体[18]。该多旋翼无人机的 6个旋翼电机沿机身圆周对称分布。无人机机悬停时风场稳定,可采用 Ansys流体分析中的 3D风扇模型[19]计算方法将计算域分为静止域和流动域:将高速旋转的单个螺旋桨所在的极小的范围设置为圆柱型流动域(圆柱半径设置为螺旋桨叶片的半径,即30 cm,厚度为叶片的空间高度,无限接近于零),如图3a 中A所示。将螺旋桨以外的计算域设置为圆柱型静止域(圆柱半径为1.5 m,高度为3.6 m)[20],如图3a 中B所示(在图3a所示仿真模型中,圆柱型静止域中小圆柱所在的上表面圆心设置为空间坐标轴的原点,竖直向下为Z轴正方向)。单个旋翼电机的转速设置为2 960 r/min,螺旋桨叶片上下表面的实测压差为150 Pa。
由仿真结果知,悬停状态下,多旋翼无人机的风场对称分布,在机身下方,各旋翼产生的气流螺旋向下。从图3c~图3g不同水平面上的气流分布情况可知,旋翼产生的气流扰动区域随着与机身底部的距离增大而扩大,同时风力强度逐渐衰弱,距离增大到约1 m时,不同旋翼下的气流扰动区域出现交叉,逐渐扩大。上述规律表明,若稻种离开撒播装置出口后进入旋翼风场气流扰动区域,其运动轨迹主要受旋翼风场影响,在区域内逐渐散开,能获得较大的幅宽;当稻种逃离旋翼风场气流扰动区域后,其运动轨迹主要由逃离时最后时刻的初速度和方向决定,做自由落体运动后落入泥面。换言之,若无人机相对地面的飞行高度小于其旋翼风场衰减的距离,则撒播幅宽主要受旋翼风场影响。
图 4为在2个特殊平面上的风速分布情况,如图4中箭头所示,在各旋翼气流柱周围产生一定的低压区,吸引机身下方的中心区域和周边区域的气流向其靠近。在机身底部及2个旋翼之间所形成区域的气流扰动较少,适合将撒播装置的出口安装于该区域内。由图4a可知,旋翼下方的风速较大,气压较低,吸引周围的气流,由图4b可知旋翼之间的区域风速较小,气流被迫趋于旋翼正下方,且在一定范围内,风场风速随着离地高度的减小而增大。
2.2 分流箱的设计
撒播装置的外部气流由涵道风机(群汐QX90-80A,威海齐飞模型科技有限公司)提供。为了将涵道风机产生的高速气流进行整流,以获得较均匀的平行气流用于后续物料的输送,设计了分流箱,入口处连接涵道风机。
根据流体力学相关理论[21],相同时间内,气流通过密闭容器 2个截面的流量相等,分流箱出风口的风速值与出风口直径之间的关系可用式(1)表示。

式中va为涵道风机的出口风速,m/s;vb为分流箱的气流出口风速,m/s;Da为分流箱气流入口直径,mm;Db为气流出口的直径,mm。由式(1)可知,截面处的气体流速与截面面积成反比。
图3 整体旋翼风场仿真Fig.3 Simulation of overall rotor wind field
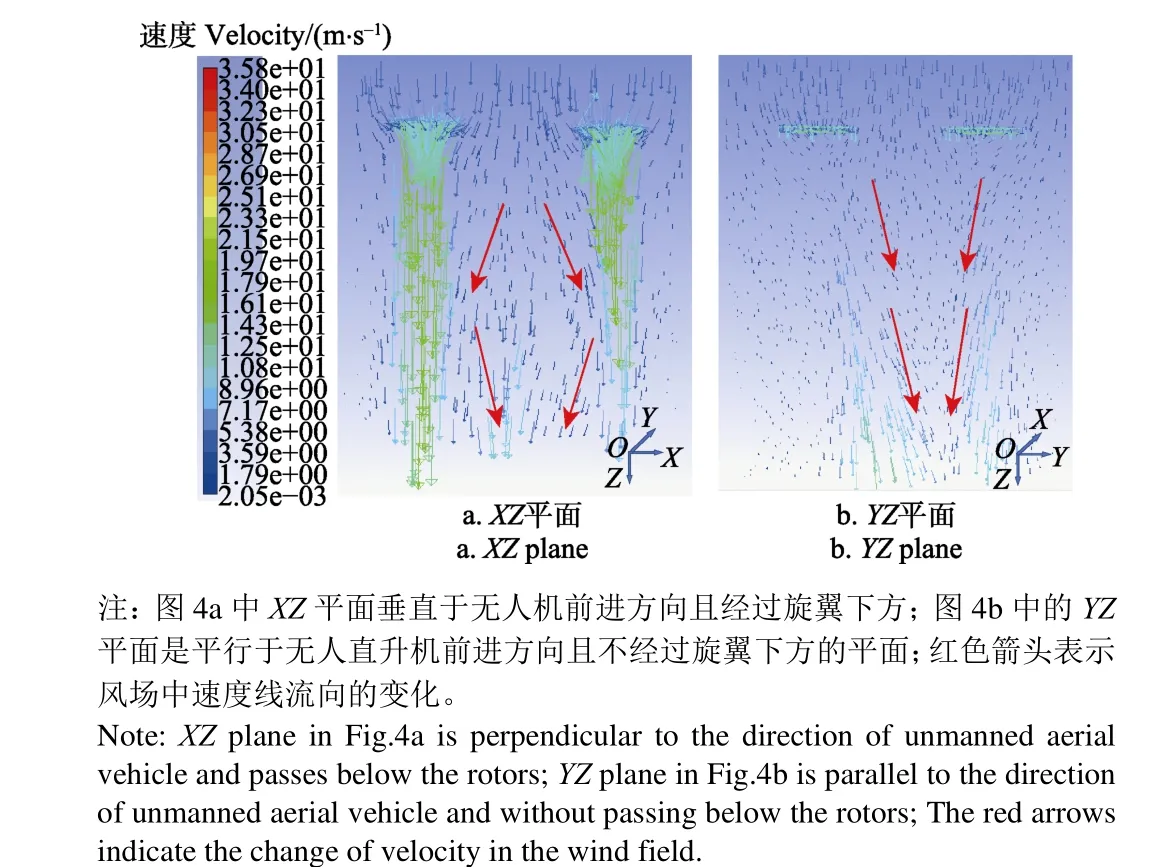
图4 特殊平面上旋翼风场仿真Fig.4 Simulation of rotor wind field of special planes
水稻颗粒质量轻,且相互之间的摩擦力较大。为了形成较大的撒播幅宽,需要为稻种提供较大的初始速度,即需要较大的气流出口速度,但随着气流出口速度增加,风阻及能量消耗也会增加。为了得到最佳的气流出口参数,设置了 6组气流出口直径,通过理论计算和试验验证的方法,得出了气流出口直径与气流出口速度的关系,如表1所示。
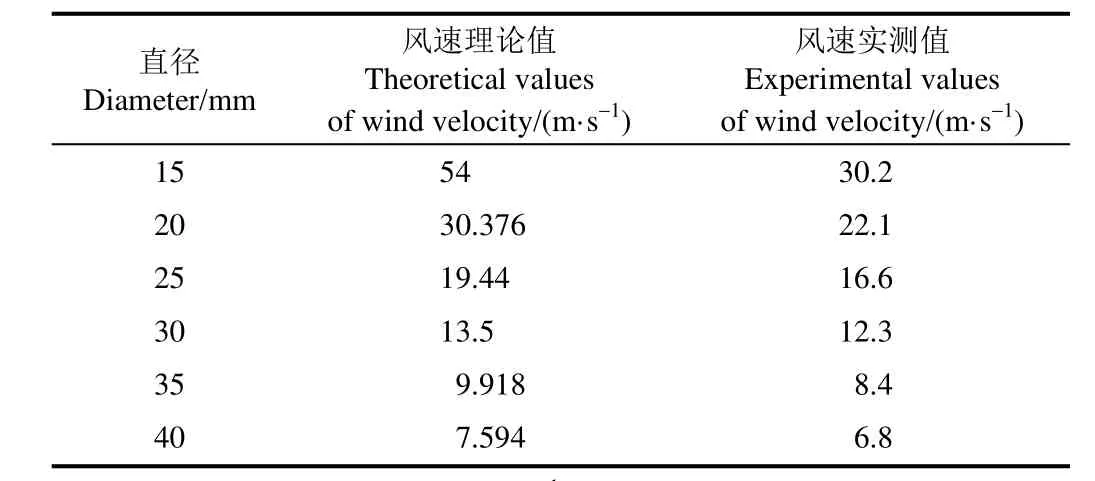
表1 气流出口直径与气流出口的风速关系Table 1 Relationship between diameters and wind velocity of air-flow outlets
由公式(1)可知,当分流箱气流出口直径较小时,风速值较大,这与理论值一致。但是理论值与实测值之间存在较大差异,主要是因为随着气流入口与出口截面间差距的增加,气流箱中紊流度增加,气流阻力加大,能量损失较严重[22]。而随着气流出口截面积的增大,实测值与理论值趋于一致。根据试验用稻种的物理特性选择吹送稻种的气流初始速度最小为10 m/s效果较好[23]。通过试验测试,折中考虑气流出口风速与能量损失情况,气流出口直径范围在 30~35 mm之间较好,确定为φ32 mm,6个气流出口的实际风速均值为9 m/s,变异系数为7.08%,表明各气流出口速度间差异不显著,较为均匀,基本满足撒播要求。
2.3 导流通道的设计与仿真
导流通道连接在分流箱的气流出口处,是气流与水稻种子混合的通道,该通道的设计既要考虑无人机机身底部空间,又要使水稻颗粒飞离时有较佳的初始速度以便形成较佳的幅宽[24-25]。
2.3.1种子在导流通道内的运动分析
如图 5所示,由落种口落下的稻种在导流通道入风口处高速气流作用下获得较高的速度,后经锥形通道分散开来,沿不同的方向抛撒。在通道内的气固两相流中,稻种间的复杂运动可分解为与其他颗粒的碰撞过程及在流体中的悬浮过程[26],在稀相气固两相流中[27],气流与稻种的作用力远大于稻种之间的作用力,所以忽略稻种之间的相互碰撞。
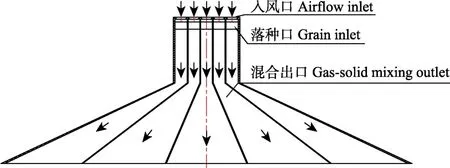
图5 种子在导流通道内的运动轨迹Fig.5 Motion trajectory of seed particle in diversion channel
下面分析单个稻种在水平气流中的运动,假设稻种与气流之间无热量传递,可将气流对稻种的作用力分解为与气流方向相同的气动力 Pv和与相对速度 v垂直的升力Pr,分别位于法向量n的两侧,则气流的作用力表示为[28]

式中Pv, Pr为稻种所受的气流作用力,N;ρ为空气密度,kg/m3;v为种子颗粒与气流的相对速度,m/s;d,L为稻种的长径,cm;Cv为气动力系数,Cr为升力系数[29]。
故种子颗粒在通道内受重力和气流作用力,在竖直和水平方向上有
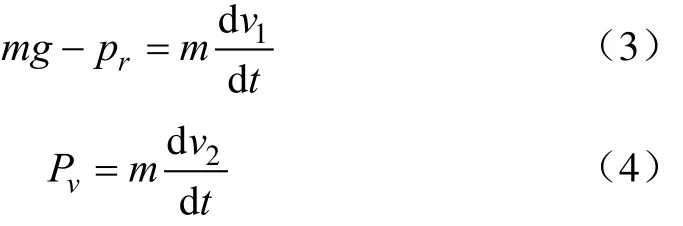
式中m为种子颗粒的质量,g;g为重力加速度,m/s2;t为种子颗粒下落的时间,s;v1为种子颗粒竖直方向上的速度,在落种口处为 0,m/s;v2为种子颗粒水平方向上的速度,初始值为0,最大值为气流速度v,m/s。
由于稻种的雷诺数符合牛顿定律,在空气中的悬浮速度和阻力系数接近常量[30],气流作用力用上述公式表示不会产生很大误差。因气流速度较高且通道空间有限,水稻颗粒运动到导流通道出口的过程中可能会触碰且沿底面运动,导致飞离导流通道的种子颗粒的速度会在一个范围内,从而形成具有一定宽度的落种区,即导流通道的长度及形状也会对颗粒的运动产生影响。在锥形通道内设计一段直线通道,便于颗粒与气流充分混合,较短的时间内获得较大的速度[31]。
2.3.2导流通道内气流分布的仿真模拟
不同锥角的导流通道内部的气流分布不同,对稻种的引导作用也不同。为了优选出气流阻力最小的锥角,设计了 4 种不同锥角(锥角分别为 90°,110°,130°和 150°)的导流通道,选取最外侧的通道,通过仿真模拟分析通道内部气流速度的分布情况。设置初始条件为:导流通道入口处气流速度为10 m/s,出口气压为1个标准大气压,其余为常态。
速度仿真结果如图 6所示,速度以流迹线的形式表示,图6a与图6b所示出口处的速度分布集中在截面两侧,中间部分几乎没有速度流迹线,图6c与图6d所示出口处的速度流迹线分布均匀,且随着锥角增大,出口处的气流速度有所减小。
水稻在通道内运动时,较好的流通性和均匀性能够促进良好的撒播效果,从速度流迹线来看,锥角越大越均匀,但锥角为 150°时,通道内的最小截面较小,严重阻碍水稻颗粒的流动,降低流通性。由图 6仿真结果知130°是较佳的折中选择,是否能满足实际生产中对撒播幅宽和撒播均匀性的要求,还需要进一步进行样机试验验证。
2.4 撒播装置的集成控制
撒播装置包括机上执行机构和手持地面控制模块两部分,二者通过2.4 G全向高增益天线进行无线通信。通过手持地面控制模块与无人机上执行机构之间的通信实现撒播作业的控制。其控制主要包括以下流程:
1)作业前的参数标定:作业前需根据不同品种种子颗粒的物理特性对排种槽轮转速与排量之间的关系进行标定,不同的转速值对应不同的排量,将标定值存储在机上执行机构的控制器中,作业时可根据不同种类的种子颗粒撒播量的要求调整排种槽轮的转速。
2)作业中的排量控制:在实际作业中,控制器接收无人机前进速度的反馈信号,根据无人机前进速度实时调整排种槽轮的转速,进而实现排种量的自适应调整,保证撒播的均匀性;此外,还根据无人机距离地面的高度控制风机风速,期望以此来调节撒播幅宽,降低重播、漏播的风险。具体实施过程如图7所示。
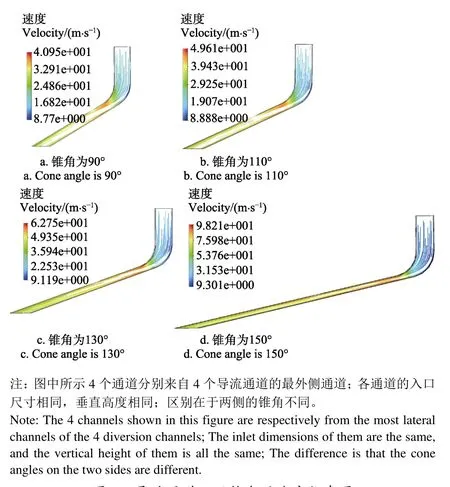
图6 导流通道不同锥角的速度仿真图Fig.6 Simulation of velocity at different cone angles of diversion channel
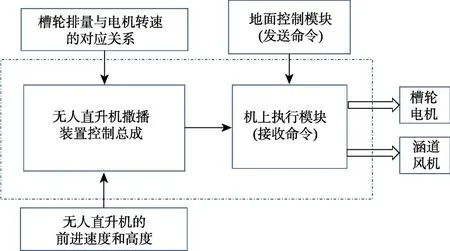
图7 无人机水稻撒播装置控制过程Fig.7 Control process of UAV rice sowing device
2.5 稻种在旋翼风场下的运动分析
利用无人机进行田间播撒作业时,旋翼风场将对稻种的运动姿态产生一定的影响。根据前文对旋翼风场和导流通道锥角的仿真分析,锥角 130°时撒播效果较佳,因此选用该参数对稻种在旋翼风场下的运动做进一步分析研究。
考虑到无人机平台的安装空间有限,仿真是假定撒播装置安装在多旋翼无人机机身下方。如图 8所示,从130°锥角的导流通道内吹出的稻种的速度为V,速度流线1~5是可能的典型轨迹。由于水稻颗粒较轻,在旋翼风场中主要受到重力G、旋翼气流和风机气流的作用力F1和F2影 响。在螺旋气流柱附近,以旋翼气流的作用力 F1为主,水稻颗粒加速下降,在导流通道出风口附近,以风机气流的作用力F2为主,水稻颗粒水平运动较快,一旦水稻颗粒远离风场,进入自由落体运动状态,对其影响以空气阻力为主,在空中的悬浮速度变化不大。但由于撒播作业高度较低,稻种主要还是在风场区域运动。如轨迹1,运动到在低压区受到吸引向高速气流靠近,轨迹2和轨迹3的F2较大,逃离风场后水平运动距离增大,有利于幅宽和均匀性,轨迹4和轨迹5遇到较强的旋翼气流,F1迅速增大,稻种加速下落。
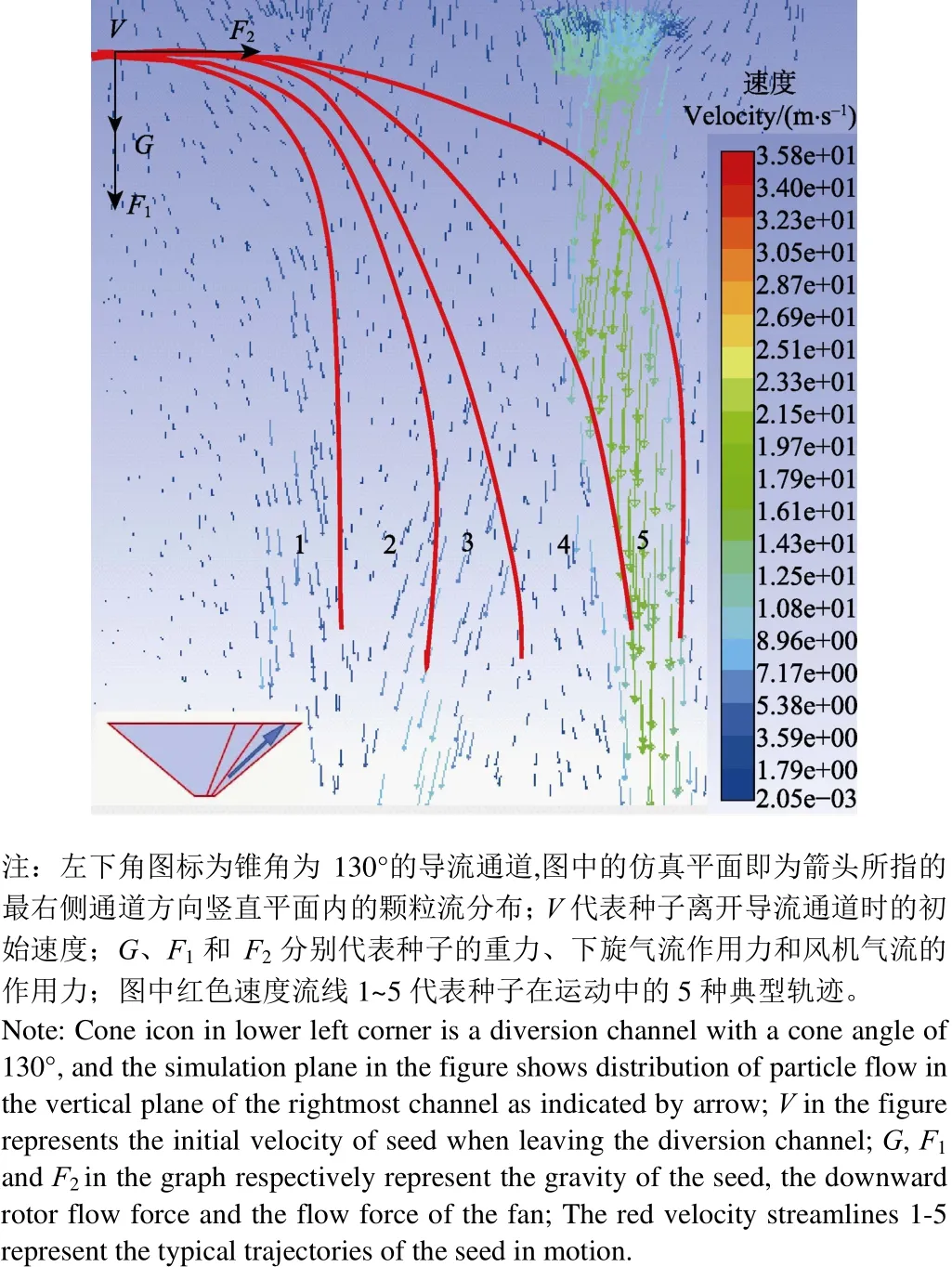
图8 130°锥角方向平面内的颗粒运动仿真分析Fig.8 Particle motion simulation in plane with 130° of cone angle
撒播装置的出口设置在 6个多旋翼的中心区域,越接近螺旋气流柱的颗粒受到的影响越大。稻种若要逃离旋翼风场形成的气流柱区域,从导流通道出口处获得的初始速度 V必须足够大。因此,播撒幅宽将受到旋翼风场和播撒装置风机所产生气流的双重影响,当无人机相对地面的飞行高度小于其旋翼风场衰减的距离时,撒播幅宽主要由旋翼风场决定,其影响规律较复杂,需要进一步试验确定。
3 样机测试试验
有效撒播幅宽和撒播均匀性是撒播作业的重要指标,为了探究撒播幅宽和撒播均匀性的影响因素,根据前述仿真分析的结果,制作了样机用于测试验证试验,分析导流通道的锥角和作业高度对撒播效果的影响并进行作业参数优选。
3.1 撒播作业效果的评价指标及测量方法
1)有效撒播幅宽:田间撒播作业通常是往返式,需要将落种区域末端接合重叠才能实现整体均匀,确定实际的撒播幅宽。因此,有效撒播幅宽的边界线定义为距离撒播区域中心线两侧撒播量为目标撒播量一半时的位置[32]。本文所用的稻种界定有效幅宽时的目标撒播量为180 粒/m2。
有效撒播幅宽测量方法:沿幅宽方向(垂直于无人机前进方向)上的同一采集区测量 3次有效撒播幅宽,取平均值,重复3次。
2)撒播均匀性:均匀性反映稻种分布的离散情况,沿无人机前进方向的均匀性用采集点处稻种数量的变异系数来评价。
撒播均匀性统计方法:沿幅宽方向上设置若干个采集区,每个采集区内沿无人机前进方向设置 3个采集点,统计每个采集点的稻种,取平均值,重复 3次。以下 2个测试试验的幅宽和均匀性的数据采集方法均如前所述。
3.2 试验场地及测试条件
3.2.1试验场地
试验场地为华南农业大学岑村校内农场,测试场地长度约为40 m,两头设置加速缓冲区10 m,选取中段匀速飞行区域设置采样区。采样区的布置如图 9所示,以无人机前进方向航线为基准总线,在前进方向上间隔设置 3行采集带,在每行采集带上,沿幅宽方向左右对称间隔30 cm设置16个采集区(采集区面积370 cm2)。
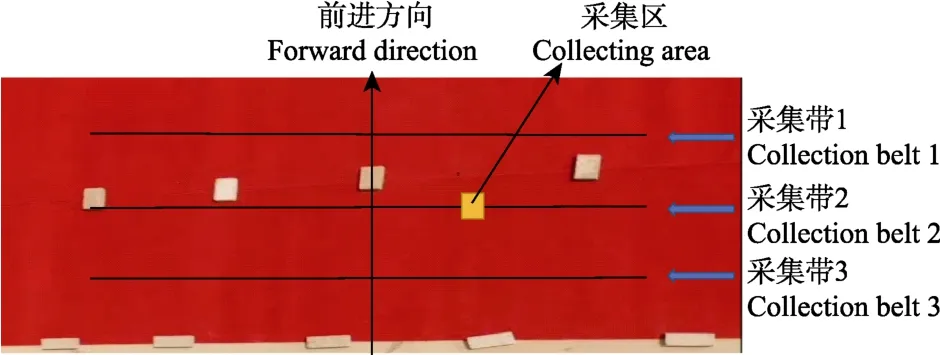
图9 采集点分布图Fig.9 Distribution of collection points
3.2.2测试条件
为保证试验因素单一,试验稻种为黄华占,排量为2.25 kg/min。导流通道锥角的测试是基于台架,作业高度的测试是基于图10所示的六旋翼无人机撒播平台(广州天翔航空科技有限公司生产),由飞手结合GPS模式手动控制航线高度及作业速度,前进速度约为2 m/s,选择无风时进行。

图10 样机实物图Fig.10 Objective figure of prototype
3.3 导流通道的锥角对撒播作业效果的影响
前文已经对导流通道的锥角进行流体仿真,根据流速分布初步确定了较佳的锥角为 130°。为了进一步验证导流通道的锥角与撒播幅宽和撒播均匀性的关系,通过台架试验对比了不同锥角下的撒播均匀性和有效撒播幅宽。
3.3.1锥角对撒播幅宽的影响
如图11所示为4种不同锥角的导流通道实物,风机出口风速为9 m/s,测试高度为1 m,重复测量3次。为了模拟田间实际撒播的效果,尽量避免落地稻种弹跳影响测试精度,该试验的落种区铺设了软毛地毯,以接纳落地的稻种。软毛有一定的高度,缓冲效果很好,表明粗糙的带壳水稻落于地毯上几乎停留在原地,有效避免了二次弹跳。表2为不同锥角对应的有效撒播幅宽。
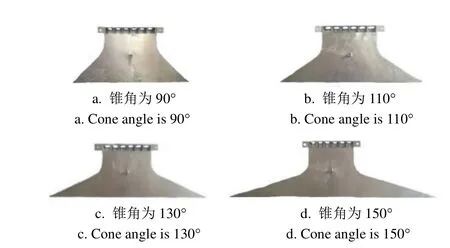
图11 4种不同锥角的导流通道Fig.11 4 kinds of diversion channels with different cone angles
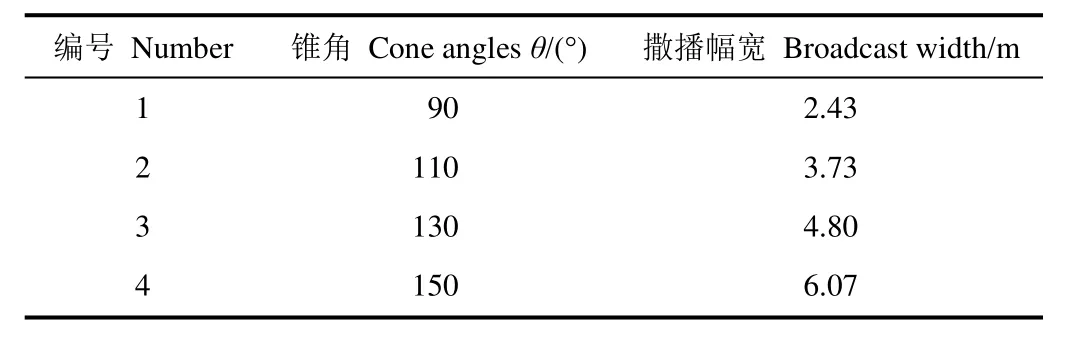
表2 不同锥角对应的有效撒播幅宽Table 2 Sowing widths in different cone angles
以锥角为自变量,以撒播幅宽的均值为因变量,对锥角和撒播幅宽进行线性回归分析,显著性为 0.004,R2=0.999,锥角与撒播幅宽存在极强的线性相关性,关系式为

式中θ为导流通道的锥角,(°);H为撒播的有效幅宽,m。
3.3.2锥角对撒播均匀性的影响
有效幅宽内各采集点处的撒播颗粒的统计情况如图12所示。对各组数据进行差异性分析,结果如表3所示。
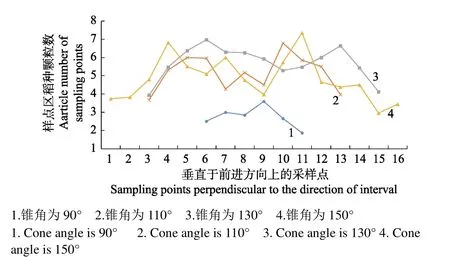
图12 不同锥度的导流通道对撒播均匀性的影响Fig.12 Influence of different diversion channel cone angle on sowing uniformity
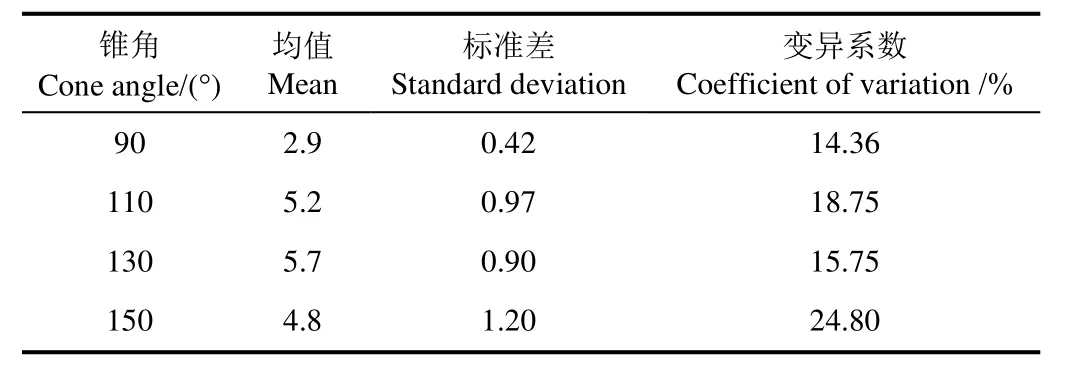
表3 不同锥角的撒播均匀性Table 3 Sowing distribution uniformity of different cone angles
从表 3可得,锥角不同的导流通道对撒播均匀性的有一定的影响,当锥角达到150°时,变异系数明显增大,这是因为,考虑到装置整体结构及安装问题,不同的通道之间的距离较大,从导流通道内飞离的种子颗粒流之间的重叠搭接效果较差,落种区出现疏密相交的现象,导致整体均匀性下降,变异系数增大。根据仿真及实际测试的结果,优选130°为导流通道的最佳锥角。
3.4 作业高度对撒播效果的影响
不同高度下的无人机下方风场形成的气流分布各不相同[33-34],稻种从不同高度下落,在空中的运动姿态所有影响程度也不相同。从前文仿真分析结果得知,无人机相对地面的飞行高度小于其旋翼风场衰减的距离时,则撒播幅宽主要受旋翼风场影响;当稻种逃离旋翼风场气流扰动区域后,其运动轨迹主要由逃离时最后时刻的初速度和方向决定,做自由落体运动后落入泥面。农用无人机常见的作业高度试验范围为1~3 m,为了探究无人机作业高度对撒播作业效果的影响,以高度为自变量,设置 5个高度梯度进行测试试验,撒播装置的导流通道锥角为130°,分流箱的出口风速值约为9 m/s,飞机前进速度、撒播量和气象条件等其他条件均如前述3.2节所示。
3.4.1作业高度对有效撒播幅宽的影响
不同作业高度下的幅宽试验结果如表 4所示。为检测作业高度是否对撒播幅宽有显著影响,首先以作业高度为控制变量,撒播幅宽均值为观测变量,对表 4中数据进行相关性分析,结果显示相关性的显著系数为0.359>0.05,因此,在1~2.8 m范围内的撒播高度与撒播幅宽没有显著相关性。分析原因为:由前文可知,导流通道的出口设置在几个旋翼之间,且撒播幅宽与导流通道的锥角有很强的相关关系,该试验是在导流通道内的风速和导流通道的锥角均不变的情况下进行的,水稻颗粒飞离撒播装置后得到的初始速度的差别并不大。在试验高度范围内,当高度小于2.8 m时,随着离地高度的减小,旋翼气流有所增大,尤其是旋翼正下方的区域,该处形成的低压也会迫使旋翼之间的种子趋于旋翼正下方运动。种子下落过程中也会受到自然风力作用,水平位移有限,但是相比于自然风力的影响,种子受风场内旋翼气流作用的时间较长,尤其是竖直向下的速度增大,被迫加速下落,而不会增大空中漂浮的时间,因此多数种子在此区域落地,幅宽增加不明显。
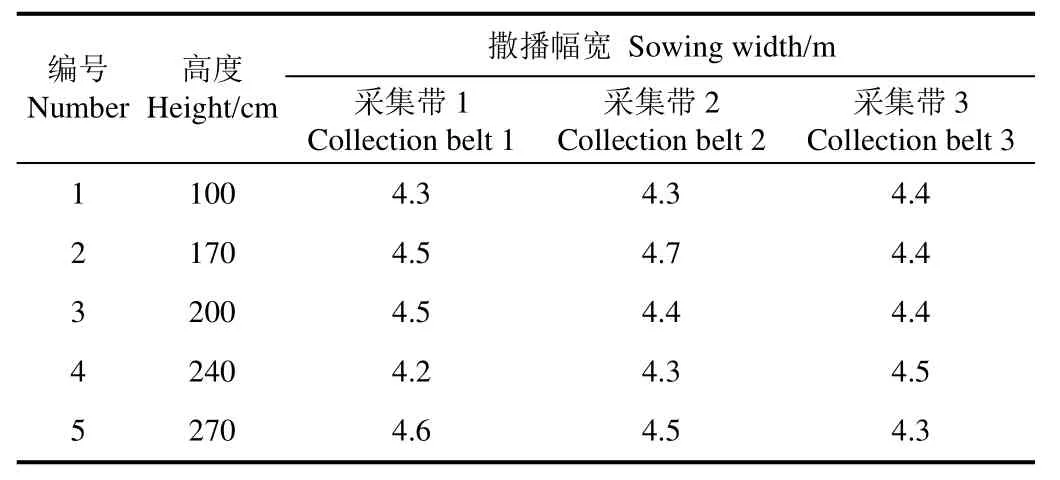
表4 作业高度与撒播幅宽的关系Table 4 Relationship between height and sowing width
3.4.2作业高度对撒播均匀性的影响
不同的作业高度下,有效幅宽内各采集点处的稻种分布情况如图13所示。由图13可知,不同高度下各曲线的趋势基本一致,两端采集点(编号1~3和14~16)处的颗粒数约为目标量的一半,且各曲线的波动情况没有明显的规律。总体来看,高度为100 cm时的有效幅宽最短,高度为200和270 cm时的有效幅宽最长。
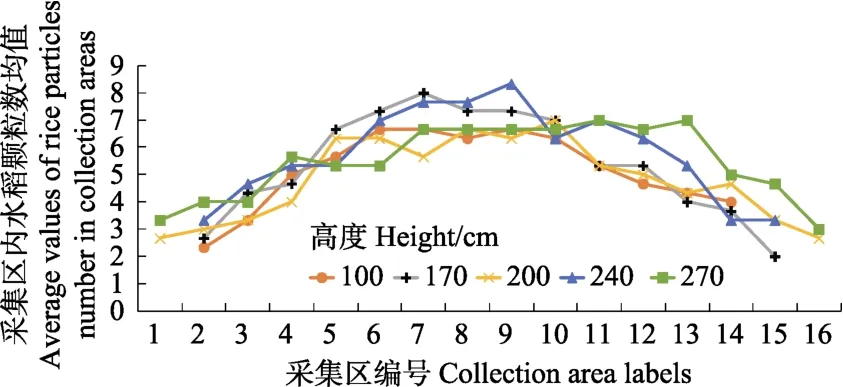
图13 各采集区水稻颗粒数均值曲线Fig.13 Average number of grain particles in collection areas
为了进一步探究作业高度对撒播均匀性的关系,在有效幅宽内选取采集区的稻种数均值进行差异性分析,结果如表5所示。
对作业高度与变异系数进行相关性分析,结果表明相关性的显著系数为 0.197>0.05,二者没有很强的相关性,主要因为稻种飞离撒播装置时的初始水平速度相差较大,在旋翼风场中的受力不同,竖直向下运动加快,部分水平速度较小颗粒较早扎堆落地,不利于稻种分散。因而在1~2.8 m范围内,作业高度对撒播均匀性并无太大影响。考虑到作业高度较低(约1 m)时旋翼风场会对水田表面产生影响,作业高度较高则会降低旋翼风场的利用率,在实际作业中,综合撒播幅宽和均匀性变异系数以及田间作业环境等因素,建议2 m作为该无人机平台的适宜作业高度。
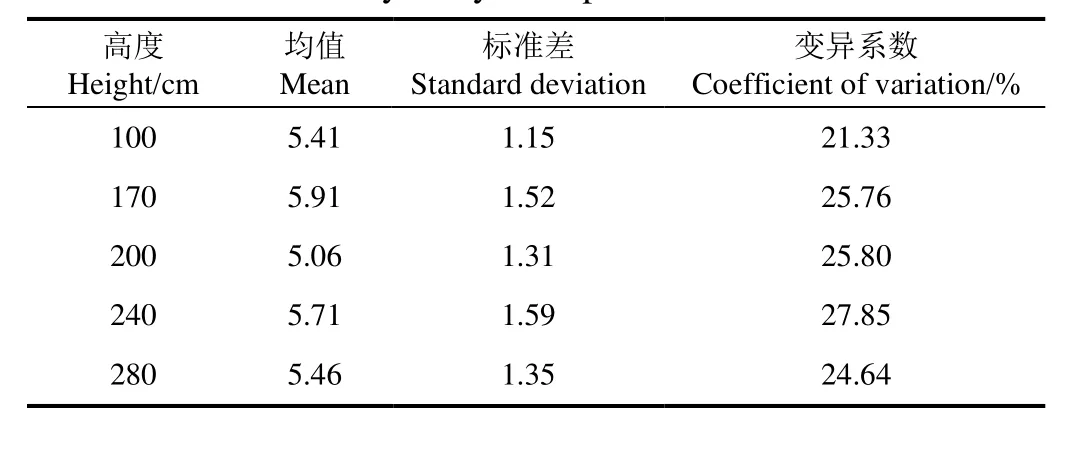
表5 各采集区颗粒均匀性分析Table 5 Uniformity analysis of particles in collection areas
4 结论与讨论
本文设计了一种气力式无人机撒播装置,采用播量可调的外槽轮排种,以风机产生的高速气流作为种子撒播的动力,通过对关键部件进行仿真和试验测试,得出以下结论:
1)分流箱的气流出口尺寸直接影响气流出口速度,可根据需要的气流速度设计合理的分流箱,经仿真分析和试验验证,针对该试验中所用的涵道风机选择φ32 mm作为较佳的气流出口直径。
2)导流通道锥角与撒播幅宽之间存在极显著的线性相关关系,相关系数R2=0.999,显著性为0.004;通过相关的仿真分析和试验验证,优选130°为导流通道的锥角。
3)在农用无人机常见的作业高度范围(1~2.8 m)内,在1~2.8 m的范围内,作业高度与撒播幅宽、作业高度与撒播均匀性的相关性均不显著。因此,在该范围内,无人机进行撒播作业时,可以不用考虑作业高度波动对撒播幅宽和均匀性的影响。综合考虑作业环境等因素,建议2 m作为该无人机平台的适宜作业高度。
本文所设计的气力式无人机撒播装置可实现排量随无人机前进速度的变化而调节,提高了无人机撒播作业的均匀性。但是影响撒播均匀性的因素还有很多,这些因素的影响以及最佳参数的确定还有待进一步研究。
[参考文献]
[1] 臧秀法,王晓勇,兰海涛. 国内外播种机械的研究现状及发展趋势[J]. 农业科技与装备,2014(12):53-54.Zang Xiufa, Wang Xiaoyong, Lan Haitao. Research status and development trend of seeder machine at home and abroad[J]. Agricultural Science & Technology and Equipment,2014(12): 53-54. (in Chinese with English abstract)
[2] 焦加国,张惠娟,贺大连. 我国冷浸田的特性及改良措施[J]. 安徽农业科学,2012,40(7):4247-4248.Jiao Jiaguo, Zhang Huijuan, He Dalian. Character and improving measures of cold spring paddy soil in China[J].Journal of Auhui Agricultural sciences, 2012, 40(7): 4247-4248. (in Chinese with English abstract)
[3] 张平,郑宏刚,余建新. 高原地区冷浸田治理技术研究[J].云南农业大学学报,2005,20(5):665-670.Zhang Ping, Zheng Honggang, Yu Jianxin. Study on the improving technology of cold soak field in the high land aera[J]. Journal of Yunnan Agricultural University, 2005,20(5): 665-670. (in Chinese with English abstract)
[4] 任美锷. 中国滩涂开发利用的现状与对策[J]. 中国科学院院刊,1996,14(6):440-443.Ren Meie. Current situation and countermeasures of mudflat development and utilization in China[J]. Journal of Chinese Academy of Sciences, 1996, 14(6): 440-443. (in Chinese with English abstract)
[5] 万本太. 中国的沼泽资源及其开发与保护问题[J]. 世界环境,1991(1):24-25.Wan Bentai. Marsh resources and its development and protection in China[J]. Journal of World Environment, 1991(1): 24-25. (in Chinese with English abstract)
[6] 戴欣平,马广,陈德俊. 适应泥脚变化的可调式深泥田耕作机的研制[J]. 农机化研究,2012,34(5):112-115.Dai Xinping, Ma Guang, Chen Dejun. Development of the adjustable mud field farming machine for adapting to the change of mud[J]. Journal of Agricultural Mechanization Research,2012,34 (5): 112-115. (in Chinese with English abstract)
[7] 李朝苏,汤永禄,吴春,等. 播种方式对稻茬小麦生长发育及产量建成的影响[J]. 农业工程学报,2012,28(18):36-43.Li Chaosu, Tang Yonglu, Wu Chun, et al. Effect of sowing patterns on growth, development and yield formation of wheat in rice stubble land[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012,28(18): 36-43. (in Chinese with English abstract)
[8] 汤永禄,李朝苏,吴春,等. 播种方式对丘陵旱地套作小麦立苗质量、产量及效益的影响[J]. 中国农业科学,2013,46(24):5089-5097.Tang Yonglu, Li Chaosu, Wu Chun, et al. Effects of sowing patterns on establishment quality, grain yield and production benefit of intercropping wheat in hilly countries[J]. Chinese Agricultural Science, 2013, 46(24): 5089-5097. (in Chinese with English abstract)
[9] Zhang Chunhua, Kovacs John M. The application of small unmanned aerial systems for precision agriculture: A review[J].Precision Agriculture, 2012, 13(6): 693-712.
[10] 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10.Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract)
[11] Cai Guowei, Dias J M, Seneviratne L. A Survey of smallscale unmanned aerial vehicles: Recent advances and future development trends[J]. World Scientific Publishing Company,2014, 2(2): 1-26.
[12] Goh G D, Agarwala S, Goh G L, et al. Additive manufacturing in unmanned aerial vehicles (UAVs): Challenges and potential[J]. Aerospace Science and Technology,2017(63): 140-151.
[13] Li Jiyu, Lan Yubin, Zhou Zhiyan, et al. Design and test of operation parameters for rice air broadcasting by unmanned aerial vehicle[J]. International Journal Agricultural and Biological Engineering, 2016, 9(5):24-32.
[14] 宋灿灿,周志艳,罗锡文,等. 农业物料撒播技术在无人直升机中应用的思考[J]. 农机化研究,2018,40 (9):1-9.Song Cancan, Zhou Zhiyan, Luo Xiwen, et al. Review of agirucultural materials broadcasting application on unmanned helicopter[J]. Journal of Agricultural Mechanization Research,2018, 40(9): 1-9. (in Chinese with English abstract)
[15] Parish R L. Pattern uniformity with homeowner rotary spreaders[J]. Applied Engineering in Agriculture, 2001, 17(2):127-130.
[16] 秦朝民,刘君辉. 离心式撒肥机撒肥部件研究设计[J]. 农机化研究,2006, 28(10):100-102.Qin Chaomin, Liu Junhui. Study and design on spreading mechanism of centrifugal fertilizer spinner[J]. Journal of Agricultural Mechanization Research, 2006, 28(10): 100-102. (in Chinese with English abstract)
[17] Xiao X, Wei X H, Liu Y Q, et al. Aerial seeding: An effective forest restoration method in highly degraded forest landscapes of sub-tropic regions[J]. Forests, 2015(6):1748-1762.
[18] Wang Qianpu, Melaaen M C, De Silva S R. Investigation and simulation of a cross-flow air classifier[J]. Powder Technology, 2001, 120(3): 273-280.
[19] 张岩. ANSYS Workbench 15.0有限元分析从入门到精通[M]. 北京:机械工业出版社,2014.
[20] Ni Jun, Yao Lili, Zhang Jingchao, et al. Development of an unmanned aerial vehicle-Borne crop-growth monitoring system[J]. Sensors, 2017, 17(3): 502.
[21] 林近山,马汝建,赵东,等. 风机内空气流动仿真研究[J].济南大学学报:自然科学版,2005,19(3):255-257.Lin Jinshan, Ma Rujian, Zhao Dong. Simulation of the air flow inside a ventilating fan[J]. Journal of Jinan University :science and technology, 2005, 19(3): 255-257.(in Chinese with English abstract)
[22] 齐兴源,周志艳,杨程,等. 稻田气力式变量施肥机关键部件的设计与试验[J]. 农业工程学报,2016,32(6):20-26.Qi Xingyuan, Zhou Zhiyan, Yang Cheng, et al. Design and experment of key parts of pneumatic variable-rate fertilizer applicator for rice production[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2016, 32(6): 20-26. (in Chinese with English abstract)
[23] 邓春香,陶栋材,高静萍. 气流清选风车中谷物的动力学特性和影响因素的研究[J]. 农业工程学报,2006,22(4):121-125.Deng Chunxiang, Tao Dongcai, Gao Jingping. Dynamic characteristics and factors affecting performance of air-stream cleaning windmill[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006,22(4): 121-125. (in Chinese with English abstract)
[24] Bansal R K, Walker J T, Gardisser D R. Computer simulation of urea particle acceleration in an aerial spreader [J].Transactions of the Asae American Society of Agricultural Engineers, 1998, 41(4): 951-957.
[25] Polyák Ilona Nagyné, Csizmazia Zoltán. New methodology for measuring the floating velocity of grain particles[J].Journal of Agricultural Informatics, 2016, 7(2): 49-59.
[26] 赵湛,李耀明,陈义,等. 水稻籽粒碰撞力学特性研究[J].农业机械学报,2013,44(6):88-92.Zhao Zhan, Li Yaoming, Chen Yi,et al. Impact mechanical characteristics analysis of rice grain[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6):88-92. (in Chinese with English abstract)
[27] 刘艳艳,李耀明,徐立章. 水稻悬浮速度试验研究[J]. 农机化研究,2010, 32(2):149-151.Liu Yanyan, Li Yaoming, Xu Lizhang. Experimental study on rice floating velocity[J]. Journal of Agricultural Mechanization Research, 2010, 32(2): 149-151. (in Chinese with English abstract)
[28] 赵学笃,张魁学,张振京. 短茎秆的气动特性及其在气流中的运动[J]. 农业机械学报,1982, 13(2):55-65.Zhao Xuedu, Zhang Kuixue, Zhang Zhenjing. The aerodynamic properties of short stems and their behavior in the air flow[J].Transactions of the Chinese Society for Agricultural Machinery,1982, 13(2): 55-65. (in Chinese with English abstract)
[29] 赵京华,赵学笃,张振京. 颗粒状群体物料的空气动力特性的研究[J]. 农机化研究,1989(3):5-10.Zhao Jinghua, Zhao Xuedu, Zhang Zhenjing. Study on the aerodynamic characteristics of the aerosol mass[J]. Journal of Agricultural Mechanization Research, 1989(3): 5-10. (in Chinese with English abstract)
[30] 周祖锷. 农业物料学[M]. 北京:农业出版社,1994.
[31] 吴建章,朱永义. 气固流态化用于谷物风选的研究[J]. 粮食与饲料工业,2002(6):11-13.Wu Jianzhang, Zhu Yongyi. Study on cereal winnowing by gas-solid fluidization[J]. Cereal and feed industry, 2002(6):11-13. (in Chinese with English abstract)
[32] 张睿,王秀,赵春江. 链条输送式变量施肥抛撒机的设计与试验[J]. 农业工程学报,2012,28(6):20-25.Zhang Rui, Wang Xiu, Zhao Chunjiang. Design and experiment of variable rate fertilizer spreaser with convey chain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(6): 20-25. (in Chinese with English abstract)
[33] 胡炼,周志艳,罗锡文,等. 无人直升机风场无线传感器网络测量系统设计与试验[J]. 农业机械学报,2014,45(5):221-226.Hu Lian, Zhou Zhiyan, Luo Xiwen, et al. Development and experiment of a wireless wind speed sensor network measurement system for unmanned helicopter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(5): 221-226. (in Chinese with English abstract)
[34] 李继宇,周志艳,兰玉彬,等. 旋翼式无人机授粉作业冠层风场分布规律[J]. 农业工程学报,2015,31(3):77-86.Li Jiyu, Zhou Zhiyan, Lan Yubin,et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2015, 31(3): 77-86. (in Chinese with English abstract)