分布式电动车辆横向稳定性模糊滑模控制
2018-04-11郭景华
王 进,郭景华
(厦门大学航空航天学院,福建 厦门 361102)
在环境污染和能源危机双重压力下,发展电动汽车技术已成为解决这两个问题的有效方法之一.分布式电动汽车作为全新形式的电动车辆具有独特动力系统和传动系统,当其在高速过弯、变道以及在地面附着条件恶劣的情况下转向行驶时,会发生侧滑、急转和侧翻等失稳的危险工况,为解决横向稳定性问题,分布式电动汽车的横向稳定性控制技术在国内外各大高校和研究机构得到广泛的关注和研究[1-2].
近年来,为改善分布式电动汽车在高速行驶情况下的操纵稳定性,相关学者和研究人员提出了很多提升车辆横向稳定性的方法[3-4].林程等[5]提出基于分布式横向稳定性分层控制策略,通过调节四轮制动缸压力和电机力矩间接实现横摆力矩控制.Tchamna 等[6]对车辆运动不做简化假设并且考虑到纵向动力学提出一种横摆角速度和质心侧偏角的控制方法,并通过差速制动控制器实现对车辆横向稳定性的控制.Li 等[7]综合考虑分布式电动汽车质心处纵/横向力误差、横摆力矩、执行器控制力和轮胎利用率等性能指标,提出了一种多目标优化函数并且设计了一种加权因子调节方案来调节目标函数中各性能的相对权重,以此达到对分布式电动汽车的横向稳定性控制.刘树伟等[8]在忽略汽车非线性的影响下,提出跟踪理想横摆角速度和抑制汽车质心侧偏角的控制方法,采用线性二次型调节器(LQR)对汽车横摆力矩进行决策,在建立的七自由度车辆动力学模型上进行仿真,证明了所提出方法对横向稳定性有所提升.李少坤[9]考虑了车辆的非线性影响,基于滑模控制提出对理想质心侧偏角和横摆角速度进行跟踪的控制策略,充分利用滑模控制对非线性系统具有鲁棒性和响应速度快的优势,使得在低附着路面上高速运行的车辆能够稳定转向,进一步提升了车辆的横向稳定性.在滑模控制中引入边界层削弱抖振,但过窄的边界层对抖振削弱不明显,过宽的边界层出现较大的稳态误差,由于外界不确定因素的存在,若只使用固定的边界层将无法适应系统参数变化,滑模面附近依然存在高频切换而产生高频的抖振现象,这种高频抖振对车辆稳定性及相关机械机构磨损将产生消极的影响[10].张利鹏等[11]以车辆的横摆角速度及质心侧偏角与理想值之间的偏差作为模糊输入,横摆力矩作为控制输出参量,提出模糊控制横向稳定性控制策略;模糊控制不需借助精确数学模型,对外界变化、内部干扰及参数变化有很强的鲁棒性,其文中所提出策略在整车高速稳定性控制方面取得了良好的控制效果,但是模糊控制需要依赖研究人员的丰富经验及专家知识来设定模糊规则,且模糊控制根据系统特性进行自适应调整较为困难,会出现稳态误差.
综上所述,针对分布式电动汽车高度非线性和参数不确定的特性,本研究提出一种基于模糊滑模的分布式电动汽车横向稳定性控制策略,通过模糊理论实时在线调节变结构增益参数,并引入饱和函数削弱变结构控制的抖振现象,进而实现分布式电动汽车附加横摆力矩的控制,并基于MATLAB/Simulink与Carsim联合仿真在多工况行驶条件下对所提出的控制策略进行试验分析.
1 车辆理想模型的建立
1.1 车轴二自由度模型
车辆横摆运动及侧向运动的期望状态可由车辆二自由度模型表征,此处忽略车辆的垂向运动以及俯仰运动,只考虑车辆在绕车辆坐标系Z轴(Z轴垂直于XY轴平面)方向的横摆运动和沿Y轴方向的侧向运动,建立车辆二自由度模型[12],并假设车身是刚性的,纵向速度视为不变,附着条件良好,忽略空气阻力和摩擦阻力,轮胎处于线性范围内,车辆模型如图1所示.
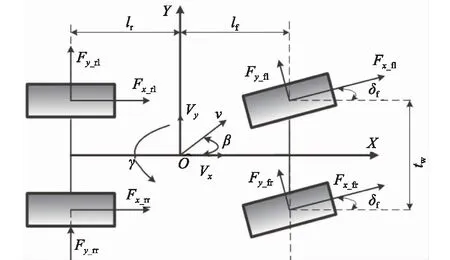
图1 车辆二自由度模型Fig.1 2 degree of freedom model of vehicle
应用牛顿第二定律来描述车辆二自由度模型:
Fy_rl+Fy_rr+(Fx_fl+Fx_fr)sinδf+(Fy_fl+
(1)
lf(Fx_fl+Fx_fr)sinδf+lf(Fy_fl+
Fy_fr)cosδf-lr(Fy_rl+Fy_rr)+
0.5tw(Fx_fr-Fx_fl)cosδf+0.5tw(Fx_rr-
(2)
其中,Fx_fl、Fx_fr、Fx_rl和Fx_rr分别表示各轮的纵向力,Fy_fl、Fy_fr、Fy_rl和Fy_rr分别表示各轮的侧向力,β为质心侧偏角,γ是横摆角速度,m表示整车质量,lf与lr分别为车身前轴距和后轴距,tw为车辆轮距,δf为前轮转角,Vx为纵向车速,Vy为横向车速,Iz为车辆绕垂直轴的转动惯量.
车辆稳态过弯时,由于假设轮胎处于线性区,轮胎的侧偏角与其所受侧向力成正比关系,即:
(3)
轮胎侧偏角由式(4)可得:
(4)
其中Cf,Cr分别表示前后轮胎侧偏刚度.转弯时前轮转角较小,有sin(δf)≈0,cos(δf)≈1,令直接横摆力矩
(5)
则综合式(1)~(5)用状态空间方程式表达如下
(6)
其中:
x=[βγ]T,
E=[2Cf(mVx)-12CflfIz-1]T,
u=Mz.
1.2 理想质心侧偏角与横摆角速度
车辆二自由度模型可作为稳定系统期望计算模型,包含车辆质量、前后侧偏刚度、轮距、轴距等反映汽车侧向运动最重要的几个量.当车辆以不变的纵向速度稳态过弯时,理想的横摆角速度和理想质心侧偏角[9,13]为:
(7)
(8)
由式(7)和(8)可知,当车辆前轮转角、纵向车速和车辆的结构参数确定时,车辆稳态过弯时的横摆角速度及质心侧偏角随之确定.但这些是基于轮胎和地面附着条件良好的情况下的假设,而在实际情况下车辆会受到轮胎和地面附着约束限制.路面的摩擦系数不能提供太高的横摆角速度下的侧向力,因此横摆角速度必须控制在轮胎与路面的摩擦系数所确定的上限范围内,并且大的质心侧偏角会使得轮胎失去线性特性而接近附着极限,所以对侧偏角的限制也很重要.
车辆在转弯时,质心的侧向加速度
(9)
其中ax为车辆的纵向加速度.侧向加速度受到地面与轮胎之间的摩擦系数μ限制:
ay≤μg,
(10)
其中g表示重力加速度.
由于Vx不变,因此ax较小,另外车辆运动中,质心侧偏角一般都较小,故式(9)中后两项可忽略,综合分析取横摆角速度的上限值为
γmax=0.85μg/Vx.
(11)
因此控制输出的理想横摆角速度可设置为
(12)
车辆的质心侧偏角最大值一般由经验选为
βmax=tan-1(0.02 μg).
(13)
与控制输出的理想横摆角速度类似,由式(8)和(13)可知控制输出的理想质心侧偏角为
(14)
2 横向稳定性模糊滑模控制器的设计
分布式电动汽车在高速转弯时车辆系统存在非线性、时变性和不确定性,滑模变结构控制[14]作为一种典型的非线性控制方法适用于解决非线性系统的控制问题[15].与其他控制方法相比,滑横控制具有不连续性,即系统随时间变化而具有开关特性.该控制通过迫使系统在一定特性下沿规定的状态轨迹作小幅度、高频率的上下运动,加上外界扰动的影响,系统会产生抖振,缺乏横向稳定性.因此在本文中采用模糊逻辑算法调整滑模控制的增益参数,通过模糊控制输出的切换函数系数K值,动态优化滑模控制器,来达到抑制抖振增强车辆稳定性的目的.
2.1 滑模控制器的设计
横向稳定控制器控制实现的关键是稳定跟随理想的车辆横摆角速度及理想质心侧偏角.构建滑模控制器的滑模函数:
s=ξ(γ-γdes)+(1-ξ)(β-βdes),
(15)
(16)
其中,下标des表示理想值,ξ为权值.

(17)
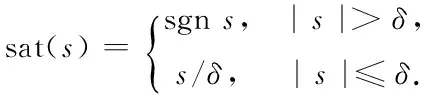
当系统不稳定时,需要通过滑模切换鲁棒控制项控制输出的附加横摆力矩us,进而将系统拉到滑模面上.本文中通过模糊输出不断调整切换鲁棒控制项的系数K值,来抑制系统抖振现象,采用饱和函数sat(s)代替控制律中的符号函数sgns,进一步削弱抖振,设δ是“边界层”厚度,即
us=-Ksat(s),
(18)
(19)
可得到控制律为
Mz=ueq+us,
(20)
将式(20)带入式(16)可得

(21)
进一步有

(22)
由式(22)可知系统满足稳定性要求.
2.2 模糊优化滑模控制器

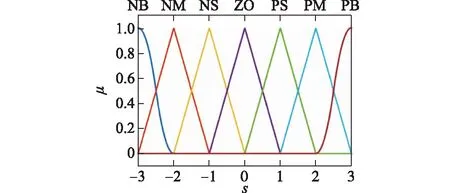
图2 滑模面s的隶属度函数Fig.2 Membership functions of sliding mode surface s
本文中提供49条模糊规则,模糊规则设置原则为:当滑模函数s及其导数较大时,增大增益系数K,即当前滑模函数离滑模面s=0较远时,用较大的增益系数K将其拉回滑模面;当滑模函数s及其导数较小时,减小增益系数K.具体规则如表1所示.
在本文中使用Mamdani推理法解模糊,模糊推理后产生的控制量通过反模糊化成精确的值
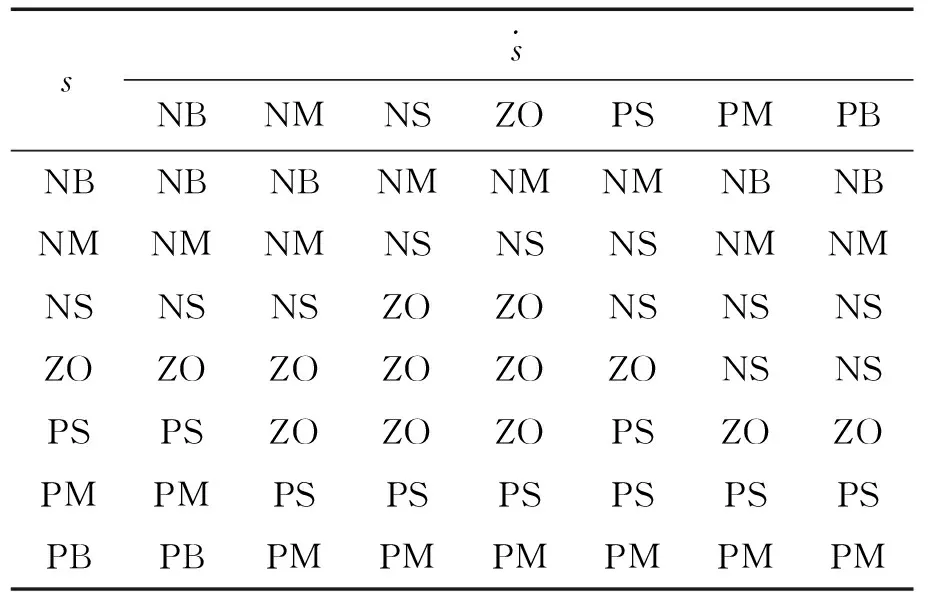
表1 模糊控制规则
(23)
其中,Kb表示解模糊后的精确值,Ki表示模糊控制的论域中的值,μki是与其对应的隶属度值.
表2 车辆参数
Tab.2 Vehicle parameters

名称整车质量m/kg转动惯量Iz/(kg·m2)前轴距lf/m后轴距lr/m前轮侧偏刚度Cf/(N·rad-1)后轮侧偏刚度Cr/(N·rad-1)轮距tw/m数值12301343.101.041.5680000800001.48
为了验证模糊滑模控制输出的附加横摆力矩的有效性,需将横摆力矩分配到各个车轮,文中采用平均分配的方法,即4个车轮的纵向力对质心处产生力矩相等.故Fx_fl,Fx_fr大小相等,方向相反;Fx_rl,Fx_rr大小相等,方向相反.又由于分布式电动车辆满足车辆的动力要求:
Fx_fl+Fx_fr+Fx_rl+Fx_rr=max,
(24)
将控制律式(20)分别带入式(5)和(24)便可求出各轮的纵向力,进而求得分配到各轮的转矩
Teq=FxiR.
(25)
其中,Fxi为4个轮胎的地面纵向力,R为轮胎滚动半径.
3 仿真分析
为验证所设计的横向稳定性模糊滑模控制器的准确性,利用MATLAB/Simulink和Carsim联合仿真,在Simulink中建立控制策略模块,改变Carsim动力系统设置[16],将传统汽车模型变为分布式电动车模型并设置试验工况.Carsim的输入为4个车轮的转矩,输出为转向轮转角、纵向车速、质心侧偏角、横摆角速度及4个车轮的纵向力,车辆参数如表2所示.
根据《中华人民共和国道路交通安全法实施条例》第七十八条:即高速公路应当标明车道的行驶速度,最高车速不得超过120 km/h,最低不得低于60 km/h.本文中仿真工况设Vx=100 km/h,ax=0.分别在高附着路面(μ=0.85)和低附着路面(μ=0.40)进行双移线试验,试验的轨迹线如图3所示.
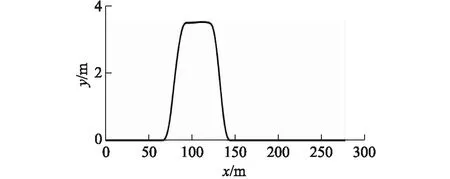
图3 双移线试验工况轨迹线Fig.3 Trajectory of double lane-change test
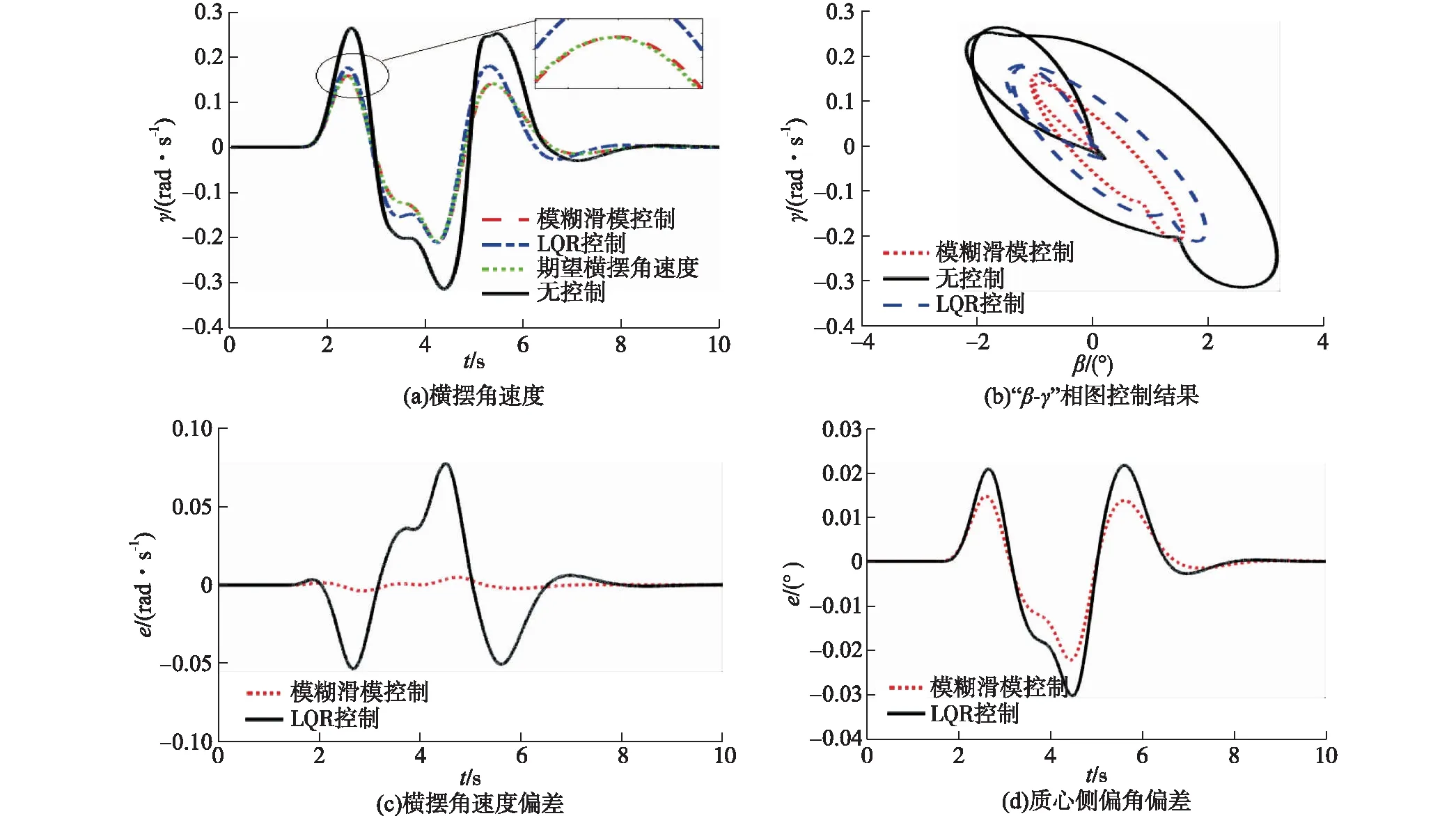
图4 高附着路面不同控制方法的仿真比较Fig.4 Compare of simulation with different control method in high adhesion road
将本文中的模糊滑模控制方法与文献[8]的LQR控制方法进行对比仿真试验,在高附着路面进行双移线试验的仿真结果如图4所示.可以看出,两种控制方法在高附着路面(μ=0.85)都能够对车辆稳定性进行控制,但模糊滑模控制方法在横摆角速度方面控制更显优势.由图4(a)可看出,与无控制对比,LQR控制和模糊滑模控制由于施加了与横摆角速度方向相反的横摆力矩,抑制了横摆角速度过大的问题;与LQR控制相比,模糊滑模控制具有反应速度快,跟踪期望横摆角精度高的优点.在图4(b)中,模糊滑模控制的“β-γ”相图在各象限伸展程度进一步缩减于零附近,稳定性更高.图4(c)和(d)反映了横摆角速度和质心侧偏角与各自期望值之间的偏差,可以看出模糊滑模控制横摆角速度偏差保持在-0.003 8~0.005 0 rad/s内,质心侧偏角偏差保持在-0.022°~0.014°.
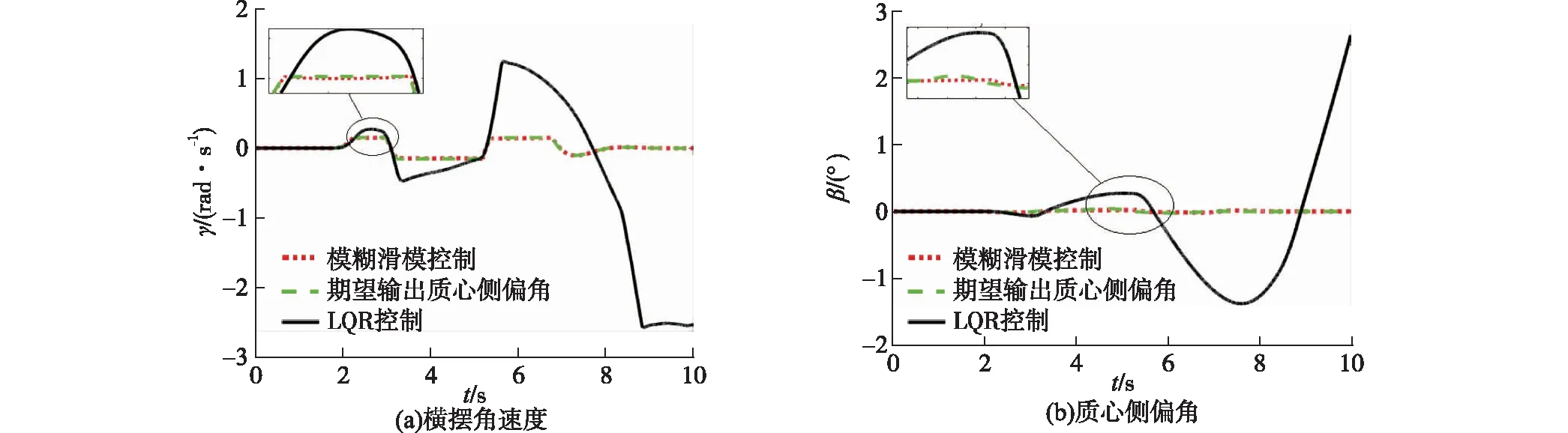
图5 低附着路面不同控制方法的仿真比较Fig.5 Compare of simulation with different control method in low adhesion road
为进一步验证滑模控制方法的科学性,在低附着路面(μ=0.4)进行试验,结果如图5所示.由图5可以看出在低附着路面,LQR控制车辆在过第一个弯道时没有立即失稳;由于车辆质心侧偏角没有抑制住,在过第二个弯道时车辆失去稳定性.而模糊滑模控制的车辆始终处于稳定状态下,并且很好地跟随期望的横摆角速度和质心侧偏角.
4 结 论
本研究针对分布式电动汽车在高速转弯及变道时存在非线性和时变性的特点,以横摆角速度及质心侧偏角为控制目标,提出模糊滑模横向稳定性控制方法,基于MATLAB/Simulink与Carsim环境下建立仿真模型,选取不同试验工况进行仿真验证,仿真结果表明模糊滑模控制方法能够有效地控制车辆姿态并提高其横向稳定性.
参考文献:
[1]ALIPOUR H,SABAHIM,SHARIFIAN M B B.Lateral stabilization of a four wheel independent drive electric vehicle on slippery roads[J].Mechatronics,2015,30(2):275-285.
[2]XIONG L,TENG G W,YU Z P,et al.Novel stability control strategy for distributed drive electric vehicle based on driver operation intention[J].International Journal of Automotive Technology,2016,17(4):651-663.
[3]EMIRLER M T,KAHRAMAN K,SENTURK M,et al.Lateral stability control of fully electric vehicles[J].International Journal of Automotive Technology,2015,16(2):317-328.
[4]余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013(8):105-114.
[5]林程,徐志峰,周逢军,等.分布式驱动电动汽车稳定性分层控制策略研究[J].北京理工大学学报(自然科学版),2015(5):490-493.
[6]TCHAMNA R,YOUN I.Yaw rate and side-slip control considering vehicle longitudinal dynamics[J].International Journal of Automotive Technology,2013,14(1):53-60.
[7]LI B,GOODARZI A,KHAJEPOUR A,et al.An optimal torque distribution control strategy for four-independent wheel drive electric vehicles[J].Vehicle System Dynamics,2015,53(8):1172-1189.
[8]刘树伟,李刚,郑利民.基于LQR的汽车横摆力矩控制研究[J].汽车实用技术,2013(12):56-60.
[9]李少坤.基于转矩分配的分布式驱动电动汽车稳定性控制研究[D].长春:吉林大学,2016:34-39.
[10]GUO J H,LI K Q,LUO Y G.Coordinated control of autonomous 4WD electric vehicles for platooning and tra-jectory tracking using a hierarchical architecture[J].Journal of Dynamic System Measurement and Control-Transactions of the ASME,2015,137(1):1-18.
[11]张利鹏,李亮,祁炳楠,等.双电机分布式驱动汽车高速稳定性机电耦合控制[J].机械工程学报,2015,51(16):29-40.
[12]邹广才,罗禹贡,李克强.基于全轮纵向力优化分配的4WD车辆直接横摆力矩控制[J].农业机械学报,2009,40(5):1-6.
[13]RAJAMANI R.Vehicle dynamics and control[M].New Yourk:Springer,2006:146-148.
[14]刘金琨.滑模变结构控制MATLAB仿真:基本理论与设计方法[M].3版.北京:清华大学出版社,2015:278-285.
[15]GUO J H,LI L H,LI K Q,et al.An adaptive fuzzy-sliding lateral control strategy of automated vehicles based on vision navigation[J].Vehicle System Dynamics,2013,51(10):1502-1517.
[16]XIONG L,CHEN C,FENG Y.Modeling of distributed drive electric vehicle based on co-simulation of Carsim/Simulink[J].Journal of System Simulation,2014,26(5):1143-1151.
