高成本和低成本MEMS加速度计性能比较研究
2018-04-09杜少林陈鹏光陈书钊曾春华陈剑鸣
杜少林, 陈鹏光, 陈书钊, 曾春华, 陈剑鸣
(昆明理工大学 理学院,云南 昆明 650500)
0 引 言
由于微机电系统(micro-electro-mechanical system,MEMS)工艺技术的限制,MEMS加速度计的精度存在缺陷,不同种类的MEMS加速度计之间存在区别[1~3]。因此,研究三轴加速度计的误差辨识方法,对传感器误差估计,对MEMS加速度计性能对比,具有十分重要的意义[2]。
目前,经常使用的惯性传感器性能评估方法包括自回归滑动平均(auto-regressive moving average,ARMA)模型、功率谱密度(power spectral density,PSD)、Allan方差估计等方法[4~6]。Allan方差法[4]计算简单,易于理解,且随机噪声在曲线各斜率段具有明确的意义,也能有效估计和确定公式模型中的随机噪声系数[5~7]。因此,Allan方差被广泛应用于MEMS惯性传感器的噪声分析和性能评估。
本文针对InvenSense公司MPU6050和Beetech公司A302EX设计了数据采集系统,对2种传感器进行实测和分析,应用Allan方差方法对2种加速度计误差系数进行计算和评估及性能对比。本文的研究方法和实验数据为MEMS加速度计的噪声问题研究和客户使用提供了参考,并对其他MEMS惯性测量单元(inertial measurement unit,IMU)具有指导意义。
1 MEMS加速度计误差源
MEMS加速度计误差源主要有:加速度固有噪声和加速度对准误差。
加速度固有噪声指加速度计在静态惯性环境条件下运行时其输出中的随机振动[1]。主要包括以下几项:1)零点漂移[8];2)电学噪声[9]; 3)温度效应[10];4)热机械噪声[11]。这些误差对于MEMS加速度计用户很难控制,因此,可用MEMS加速度计噪声大小来评估MEMS加速度计性能。
对准误差是加速度计三个轴分量相对于系统定义的惯性参考系之间的角度差[2]。理想情况下,加速度计的各个旋转轴将与系统参考系中的轴完全对中,但实际使用中每个加速度的对中误差均具有2个分量。
2 Allan方差分析法
以采样间隔TS对传感器的数据进行采样,共采样N个点,将N个数据分为K组,每组包含n个采样点,K=N/n,n≤(N-1)/2,每组相关时间为
τ=nTS
(1)
求k+1个子集的平均值
(2)
式中Ωnk+i为第k+1个子集中的第i个采集点。
Allan方差的计算公式为

(3)
式中k为划分的子集个数;E为求平均计算。实际应用中,Allan方差的计算基于一组有限的数据,会导致Allan方差估计有误差,文献[4]给出了误差区间的计算公式
(4)
式中N为总数据点数;n为每个子集包含的数据点数。在频域上,Allan方差与平稳随机过程的功率谱密度Sω(f)存在如下关系[6]
(5)
式(5)说明:当通过一个传递函数为sin4(πfτ)/(πfτ)2的滤波器时,Allan方差与传感器输出的总误差功率成正比。表1给出了Allan方差与加速度计噪声的对应关系。

表1 Alan方差与MEMS加速度计噪声关系
由于各噪声的相关时间不同,各噪声源是统计独立的,可以用各项噪声的平方和近似表示Allan方差[7]
(6)
Allan方差的拟合模型表示为
(7)
为了提高实际拟合精度,一般对Allan标准差拟合
(8)

3 数据采集系统搭建
MEMS惯性测量单元MPU6050,具有3个正交轴向的陀螺仪和3个正交放置的加速度计及一个温度计,可以用来测量载体六轴向的角速度和加速度。实验采用STM32F103RCT6作为主控制器,通过I2C接口读取MPU6050数据,STM32F103RCT6经过串口将数据传至上位机。A302EX是三轴无线加速度(振动)节点,内置天线,特别适合无线测量。A302EX数据采集系统由无线传感器节点(种类,数量可任意扩展)、接收网关、BeeData计算机采集处理软件3部分组成。实验利用A302EX通过无线接收网关将采集到的数据上传至计算机,并用BeeData计算机采集处理软件将采集的数据保存。为避免参考系不同引起MPU6050和A302EX2传感器性能对比误差,将两个数据采集平台置于相同环境。
4 实验数据采集与处理
测试条件为静态测试,X,Y轴方向加速度为0 m/s2,Z轴方向加速度约为-gn。将MPU6050和A302EX静置于相同位置1 h后进行数据采集,采样间隔为0.257 s,连续采集2 h数据。每个轴向共有28 000个样本点,每个传感器共有3个轴(其中MPU6050只读取加速度计数据,其他数据屏蔽读取)。MPU6050和A302EX采集的数据如图1所示。

图1 MPU6050和A302EX三轴加速度原始数据对比曲线
从图1可以看出:
1) A302EX加速度计在三个轴方向的精度均好于MPU6050;A302EX在数据输出之前已经过校准处理。
2) A302EX噪声明显较MPU6050大,A302EX的三轴原始数据曲线带宽明显更宽,而且存在漂移,说明A302EX在静态惯性和环境条件下运行时其随机振动比较大。
3) MPU6050的主要问题是零偏误差,需要进行校正处理。此外,实测的MPU6050数据中,发现有部分传感器的信号野点[11]非常大且多。因此,MPU6050在集成到系统中时,需要进行大量的信号处理和滤波工作,以满足系统的需要。
5 两种加速度计的性能分析
将两种传感器实测数据根据Alan方差原理绘制Allan标准差双对比数曲线,并根据式(8)对两传感器的Allan标准差进行拟合,如图2所示。
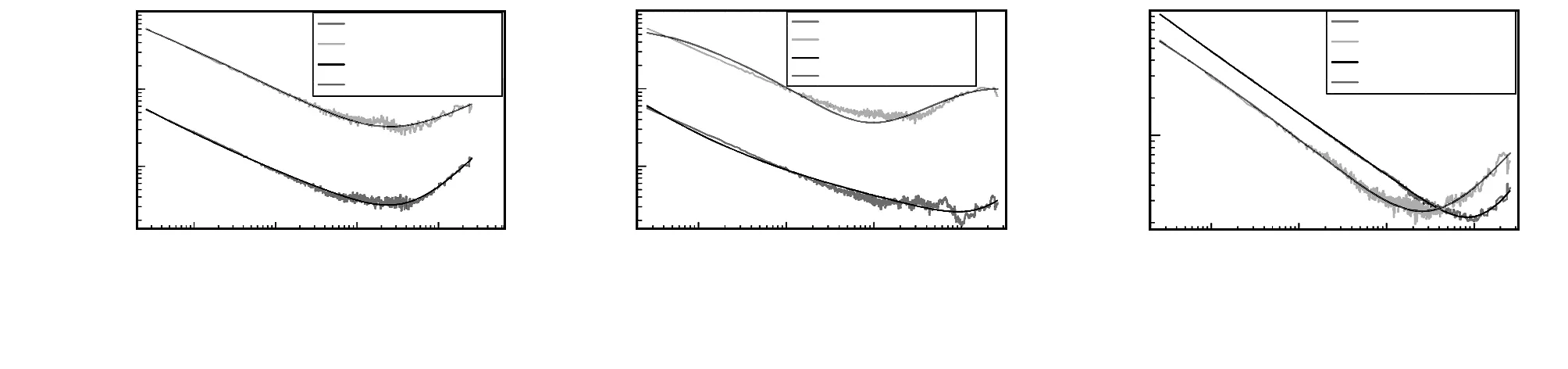
图2 MPU6050和A302EX三轴加速度Allan标准差拟合曲线与原曲线对比
根据各项噪声系数表达式可以得到两传感器噪声系数,如表2所示。
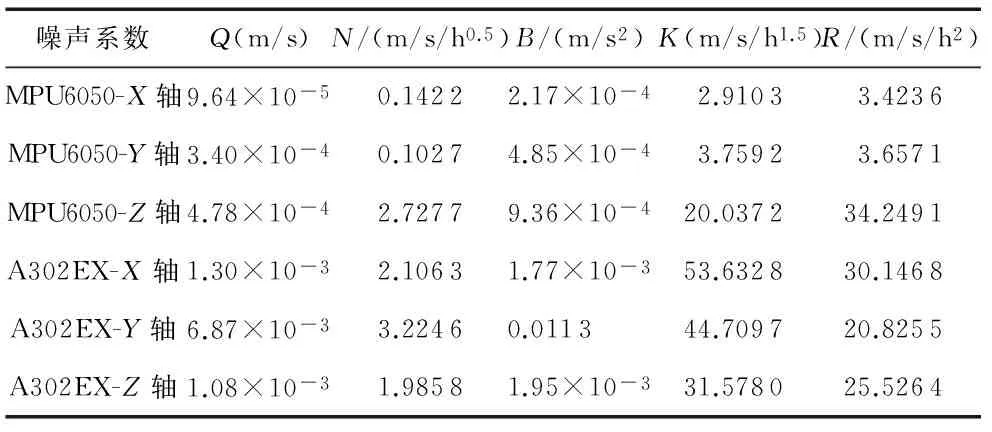
表2 MPU6050和A302EX噪声系数表
从表2中看出,A302EX和MPU6050速度随机游走、速率游走和速率斜坡3项噪声系数均很大,在工程实践中仍然需要进行噪声消除,比如采用Kalman滤波[11]等,以提高其测量精度。A302EX在X,Y轴方向的量化误差、速度随机游走和零偏不稳定性、速率游走和速率斜坡5项噪声误差系数和A302EX在Z轴方向的量化误差、零偏不稳定性、速率游走3项噪声系数均大于MPU6050。
6 结 论
简要阐述了MEMS加速度计误差源和Allan方差方法原理和实现,在Allan方差分析法基础上,对低成本加速度计MPU6050和高成本加速度计A302EX进行了实测和分析,得到了量化误差、速度随机游走和零偏不稳定性、速率游走和速率斜坡5项噪声系数。实验结果表明:Allan方差方法能有效辨识加速度计误差,MPU6050在精度和价格方面性能更好,A302EX具有配套的数据采集系统和无线传感网,在实用方面具有很大优势。
参考文献:
[1] 张 霞,闫社平.微机械加速度计内部噪声影响的对比分析[J].西安邮电大学学报,2012,17(2):57-61.
[2] 石玺文,李 杰,胡陈君,等.MEMS三轴加速度计6位置标定方法的研究[J].电子器件,2016,39(2):403-406.
[3] 万蔡辛,付丽萍,薛 旭,等.微机械加速度计发展现状浅析[J].导航与控制,2012,11(2):73-77.
[4] 于丽杰,高宗余.MEMS传感器随机误差分析[J].传感器与微系统,2012,31(3):63-65.
[5] 杜红松,程建华,唐苗苗.基于ARMA的微惯性传感器随机误差建模方法[J].传感器与微系统,2013,32(4):54-57.
[6] 赵 忠,李更新,林太刚.基于NIcompact DAQ的惯性器件性能评估系统[J].自动化技术与应用,2014,33(4):74-78.
[7] 来凌红.基于ARMA模型和狼群算法的陀螺随机漂移建模研究[J].传感器与微系统,2016,35(4):56-62.
[8] 宋海宾,杨 平,徐立波.MEMS传感器随机误差分析及处理[J].传感技术学报, 2013(12):1719-1723.
[9] Li J,Fang J.Sliding average allan variance for inertial sensor stochastic error analysis[J].IEEE Transactions on Instrumentation & Measurement,2013,62(62):3291-3300.
[10] Xue L,Jiang C,Wang L,et al.Noise reduction of MEMS gyroscope based on direct modeling for an angular rate signal[J].Micromachines,2015,6(2):266-280.
[11] 陈 晨,赵文宏,徐慧鑫,等.基于卡尔曼滤波的MEMS陀螺仪漂移补偿[J].机电工程,2013,30(3):311-313.
[12] 曾凡林,钟少龙,徐 静,等.MEMS加速度计信号光电检测与电容检测的噪声分析[J].传感技术学报,2008,21(5):785-790.
[13] 徐 哲,刘云峰,董景新.MEMS加速度计温漂预测补偿模型[J].中国惯性技术学报,2012,20(5):601-604.
[14] 闫 新,刘洁瑜,宁小磊,等.抗野值自适应Kalman滤波在MEMS加速度计信号处理中的应用[J].电光与控制,2009,16(11):71-73.
