小型航空活塞发动机混合动力系统仿真与控制策略研究
2018-04-08毛建国陈明浩
毛建国,马 粮,陈明浩
(南京航空航天大学 能源与动力学院, 南京 210016)
20世纪80年代以来,随着技术的进步、产业化的集成,无人机凭借其使用操作灵活、滞空时间长、成本低以及机载配置多样化等优点,在低空侦察、精准打击、森林防火、环境监测以及其他特殊领域中发展非常迅速[1-4]。
根据用途的不同,无人机的动力装置配置各异。小型航空活塞发动机具有体积小、结构简单、升功率高以及操作方便等诸多优势,在中低空、长航时的无人机领域中,其地位是无可撼动的。随着多年的技术积累,小型航空活塞发动机技术相对成熟,但受其自身因素的影响,仍存在噪声大、能量利用率低、大负荷下功率损失严重和存在较大的环境污染等缺点。
鉴于活塞发动机的上述缺点,电动无人机技术得以快速发展。电动无人机以电机为动力装置,拥有体积小、携带方便、噪声低,安全性强、反应灵活和无污染等诸多优点,在多旋翼无人机和微型固定翼无人机领域发展迅速[5-6]。但是受电池能量密度的制约,电动无人机的发展受到限制。
为充分发挥活塞发动机技术和电机技术的各自优点,人们把混合动力技术逐渐用于无人机领域。现有的混合动力技术多用于汽车及某些重机械领域,成熟的混合动力汽车技术并不完全适用于以轻量化为设计目标之一的无人机领域,故研究一款轻量化的混合动力系统尤为重要。
本文将轻量化考虑在内,以小型活塞发动机为主体,研究了一个适用于无人机的混合动力系统,利用Matlab/Simulink建立了混合动力模型,并进行了控制策略的研究。
1 无人机混合动力系统设计
混合动力系统主要有串联、并联和混联3种形式。串联式混合动力系统排放性最好,并且结构简单,但是需经过多次能量转换,能源利用率较低;并联式混合动力系统结构相对紧凑,可实现动力并行输出,能源利用率较高;混联式混合动力系统能量分配最为灵活,能量转换率高,但其结构较为复杂[7-8]。
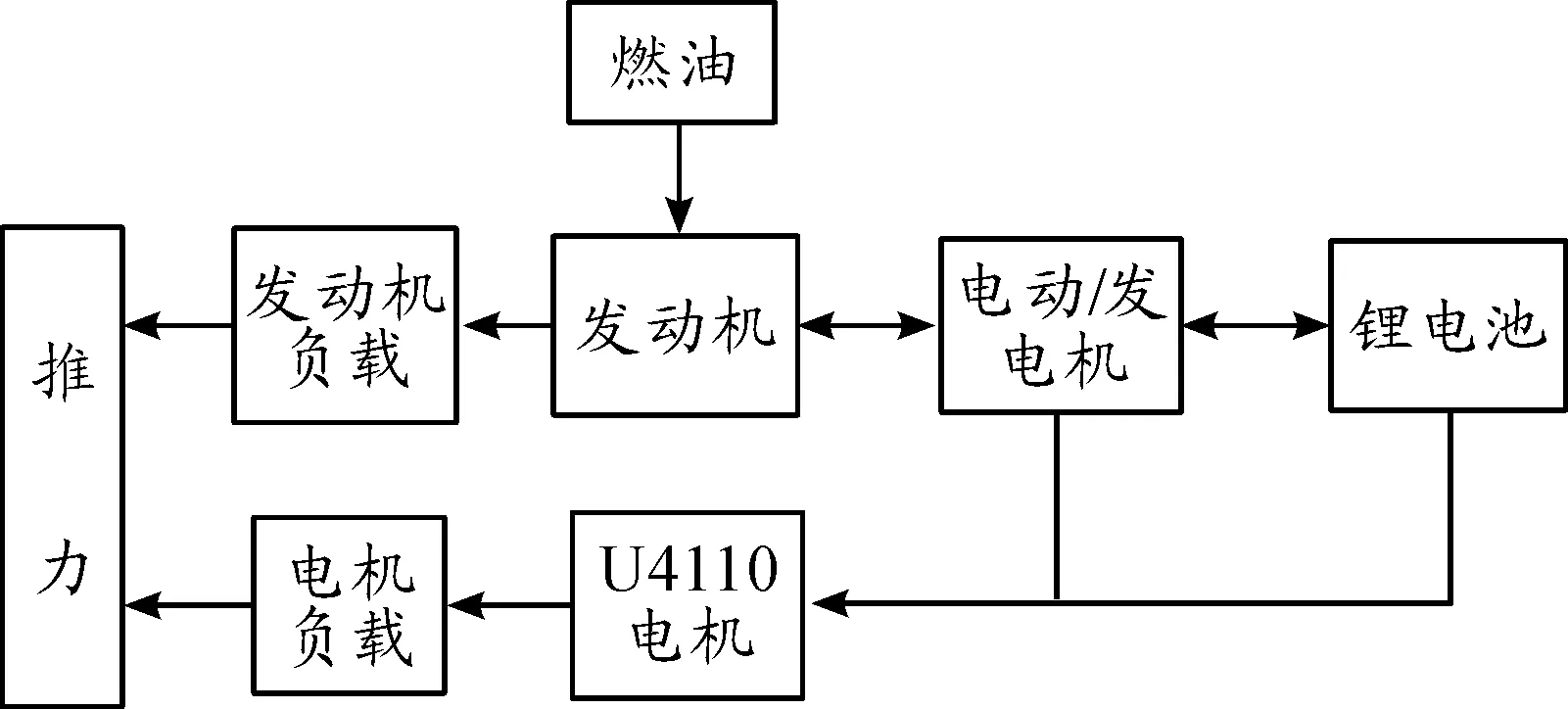
图1 并联式混合动力系统
在进行无人机用混合动力系统设计时,需同时考虑能量利用率与轻量化问题,据此,本文采用并联式混合动力系统,如图1所示。该混合动力系统有两个动力输出装置,可同时或单独对外输出动力。其中发动机与电动/发电机同轴连接,采用电磁式转矩耦合模式,具有结构紧凑、传递效率高和机械冲击小等优点。
2 混合动力系统建模

表1 发动机基本参数
混合动力系统各部分建模时主要采用理论建模法和实验建模法两种。理论建模法通用性较强,但是建模较为复杂,主要用于单体模块内部功能研究。实验建模法针对性较强,是通过建立的数据库进行查表来确定各部分参数,适合各模块间的控制策略研究,故本文选用实验建模法进行各模块的建模。
2.1 发动机模型
本文选用额定功率为3.5 kW的二冲程航空活塞发动机,基本参数如表1所示。
发动机模型可以根据需求转矩和需求转速计算得到发动机油耗,也可根据建模需求加入排放计算模块。发动机实验建模一般有两种方法,如图2所示:第1种是由发动机需求转矩和需求转速查发动机万有特性曲线表得到发动机油耗率,继而得到发动机油耗;第2种是由需求转矩和需求转速查节气门开度曲线表得到发动机当前节气门开度,查喷油MAP表得到当前喷油脉宽,最后根据喷嘴特性计算当前油耗[9-10]。
该发动机万有特性曲线如图3所示。由于发动机实际运行工况海拔跨度较大,海拔影响不可忽略,因此发动机随着海拔上升存在功率损失,燃油消耗率也受海拔影响。本文分别用2种方法建立了发动机模型,输出结果相近,可任意选择任何一种。发动机Simulink模型如图4所示,其主要包括节气门子模型、压力补偿子模型和燃油子模型。受篇幅所限,各模块具体建模过程不再详述,文献[11]给出了发动机建模的具体步骤,供读者参考。
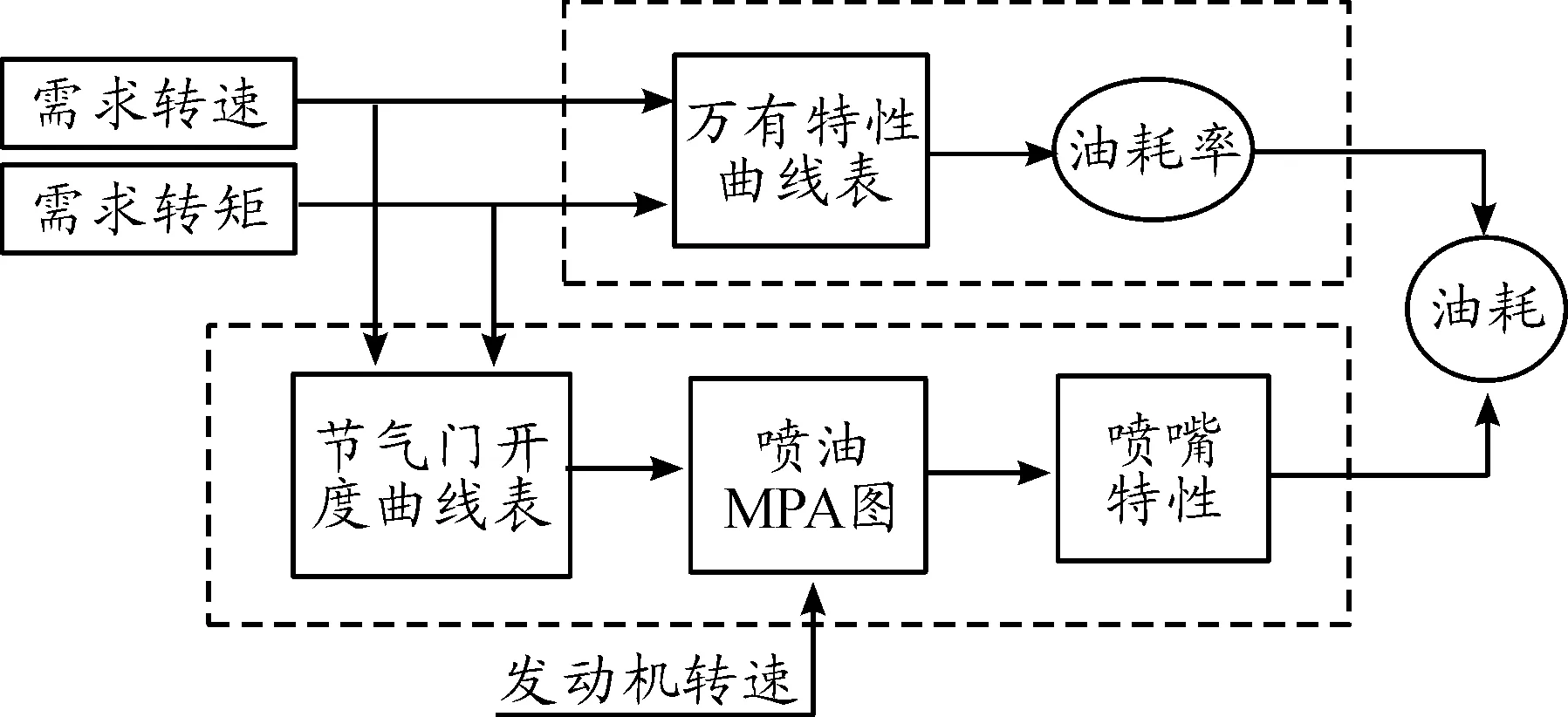
图2 发动机实验建模方法
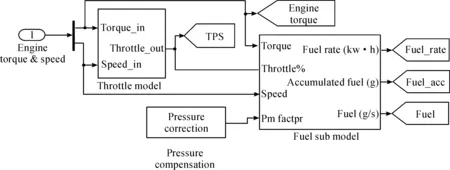
图4 发动机模型
2.2 电动/发电机模型
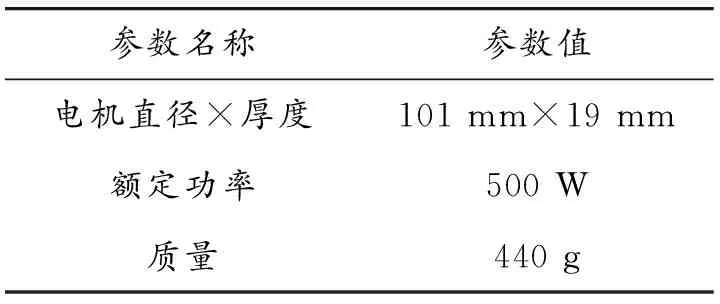
表2 电机基本参数
本文选用额定功率为500 W的盘式无感无刷直流电机,电机参数如表2所示。电机效率如图5所示,扭矩大于0为电动效率,扭矩小于0为发电效率。
将电机模型通过需求转速和需求转矩计算得到的输出电功率输入功率总线模块进行功率分配。在电动状态下可用式(1)表示,在发电状态下可用式(2)表示,电机效率通过查表获得。根据上述公式可建立如图6所示的电机模型,主要包括功率限制模块、电机效率查询模块和电机功率计算模块3部分[12]。功率限制模块主要控制电机功率不能超过电机额定功率;电机效率查询模块中通过需求转速和需求转矩查表得电机效率;功率计算模块用于计算电机功率。
(1)
(2)
其中:PE为电机模型输出功率;TE为电机扭矩;nE为电机转速;μ为电机的电动效率;ρ为电机的发电效率。

图5 电机效率
2.3 锂电池模型
锂电池建模时是将其看成理想开路电压和电池内阻串联的等效电路。锂电池模型如图7所示,主要包括电池功率限制模块、电流计算模块、SOC估算模块以及开路电压和内阻计算模块,具体建模步骤可参考文献[13]。
2.4 发动机负载模型
本文中的发动机负载选用22×10的螺旋桨。将负载模型通过需求转速计算得到的负载转矩输入转矩耦合器模块,根据控制策略进行转矩分配。螺旋桨转矩特性曲线如图8所示。根据螺旋桨转矩特性曲线建立数据库表格,通过工况转速就可查表得到负载转矩。建立如图9所指示的负载模型,主要包括转速限制模块、转矩计算模块和功率计算模块。

图7 锂电池模型
2.5 U4110电机推力模型
U4110电机在搭配17×5螺旋桨负载下,通过试验数据建立电机功率输入量与推力输出量的关系对照表,通过电机消耗的功率查表得到动力输出。U4110电机模型如图10所示。
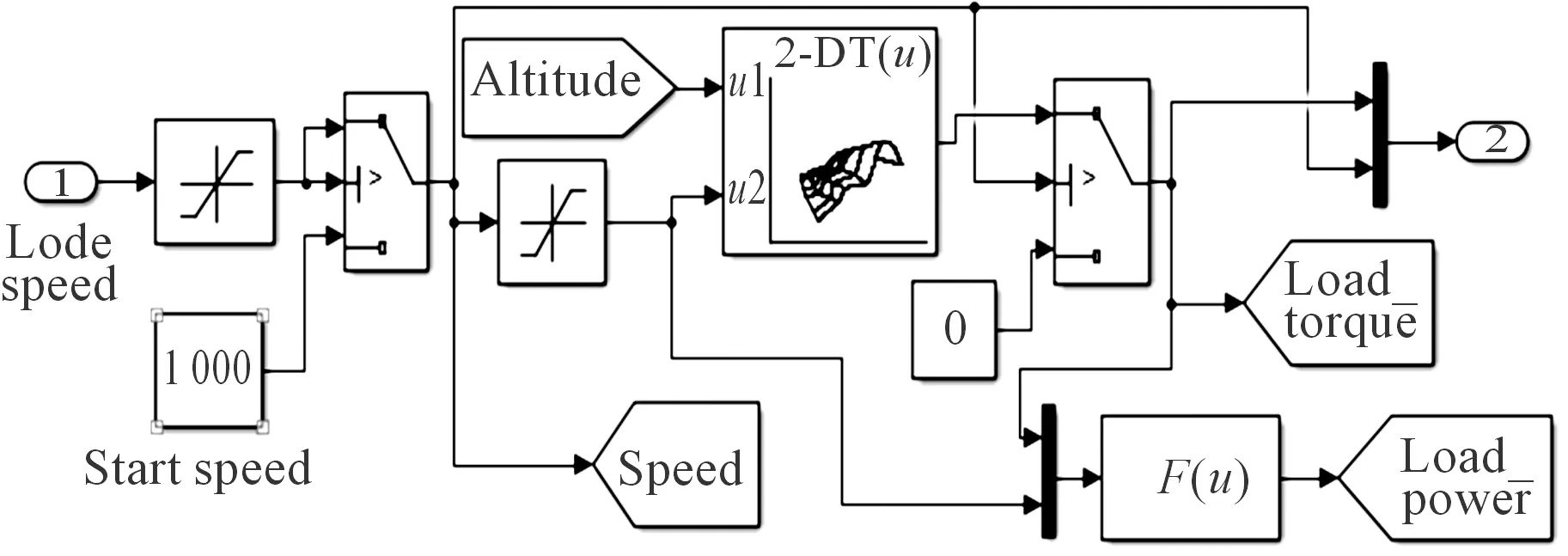
图9 负载模型
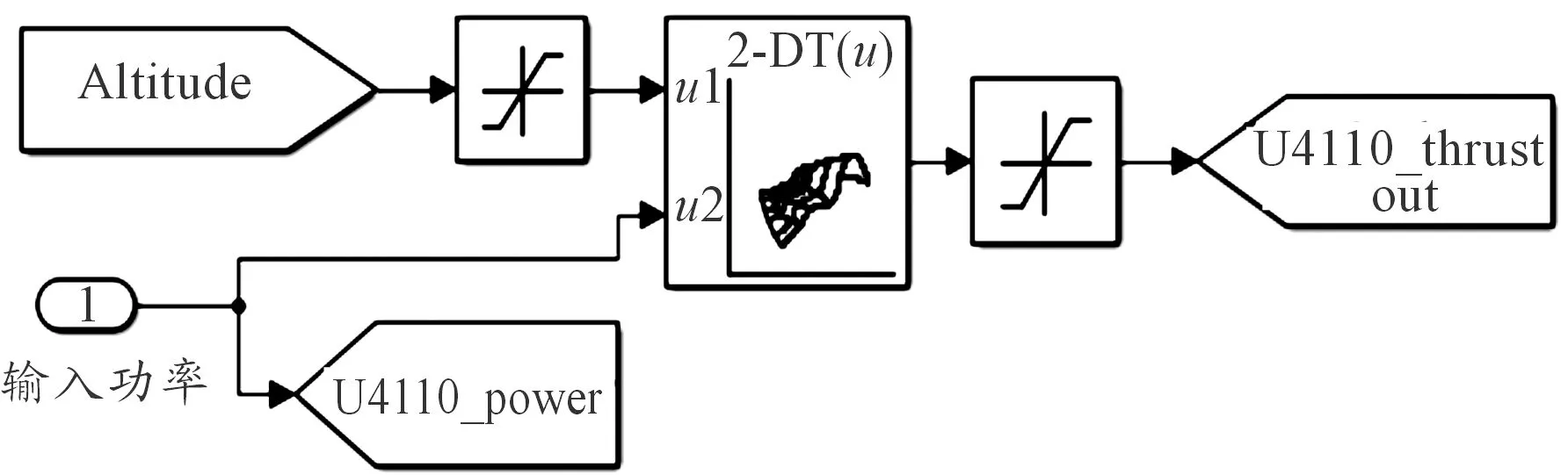
图10 U4110电机模型
2.6 转矩耦合器模型
本文采用电磁式转矩耦合器,负责将2个动力源的转矩合成后传递给发动机负载。转矩耦合器模型如图11所示,可根据控制策略将负载转矩分配给发动机模型和电动/发电机模型。
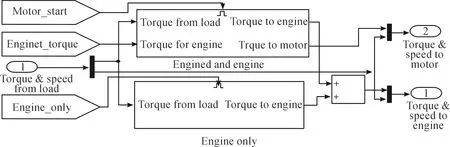
图11 转矩耦合器模型
2.7 功率总线模型
功率总线模块主要负责将电能在电池、电动/发电机和U4110电机三者之间进行调配,内部含有控制策略接入点。功率总线模型如图12所示,其主要包括电池充电管理模块、U4110电机供电模块和负载用电设备功率调配模块这3部分。
3 混合动力系统控制策略研究
3.1 转矩最优控制策略研究
增加巡航时间和提高动力性能一直是无人机研究的两大目标,本文在进行控制策略研究前充分分析了发动机的实际工作情况。
图13为该小型活塞发动机的万有特性曲线,另外图中给出了该发动机的最佳油耗率曲线、海平面处特定负载下的发动机运行工况曲线和海拔为2 000 m时的特定负载下的发动机运行工况曲线。通过分析可知,在给定的发动机负载下,发动机运行转速和转矩是相对应的,随着海拔上升,相同转速下的发动机工作转矩略有下降,但是其都有一个共同特点:在较低转速下发动机处于最佳工况转矩以下(以下称为较低速工况),在较高转速下发动机处于最佳工况扭矩以上(以下称为较高速工况),在以上2种工况下发动机都处于费油工况;随着海拔上升,发动机功率损失加重,无法满足用户短时大动力需求。

图12 功率总线模型

图13 发动机万有特性曲线、最佳油耗率曲线及部分运行工况曲线
当发动机处于较低速工况下时,发动机工作转矩处于最佳燃油消耗率转矩以下,发动机功率得不到有效利用,处于费油工况点。此时,本混合动力系统中的电动/发电机当作发电机,消耗发动机功率,实时调整发动机转矩在最佳油耗率转矩附近,发电机发出额外功率给U4110电动机供电对外输出动力。另外,电池也可根据SOC的高低实时调节输出功率。能量流向如图14所示。
当发动机处于较高速工况或大动力需求工况时,发动机工作转矩处于最佳油耗率转矩以上,发动机处于大转矩费油工况。此时,本混合动力系统中的电动/发电机当作电动机,消耗电池能量辅助发动机提供动力,分担一部分发动机扭矩,实时调整发动机转矩在最佳油耗率转矩附近。能量流向如图15所示。
3.2 基于规则的逻辑门限控制器设计
根据最优转矩控制策略建立逻辑门限控制器模型,如图16所示,根据需求转速查表得到发动机最优转矩,同时保证电动/发电机效率大于0.75。
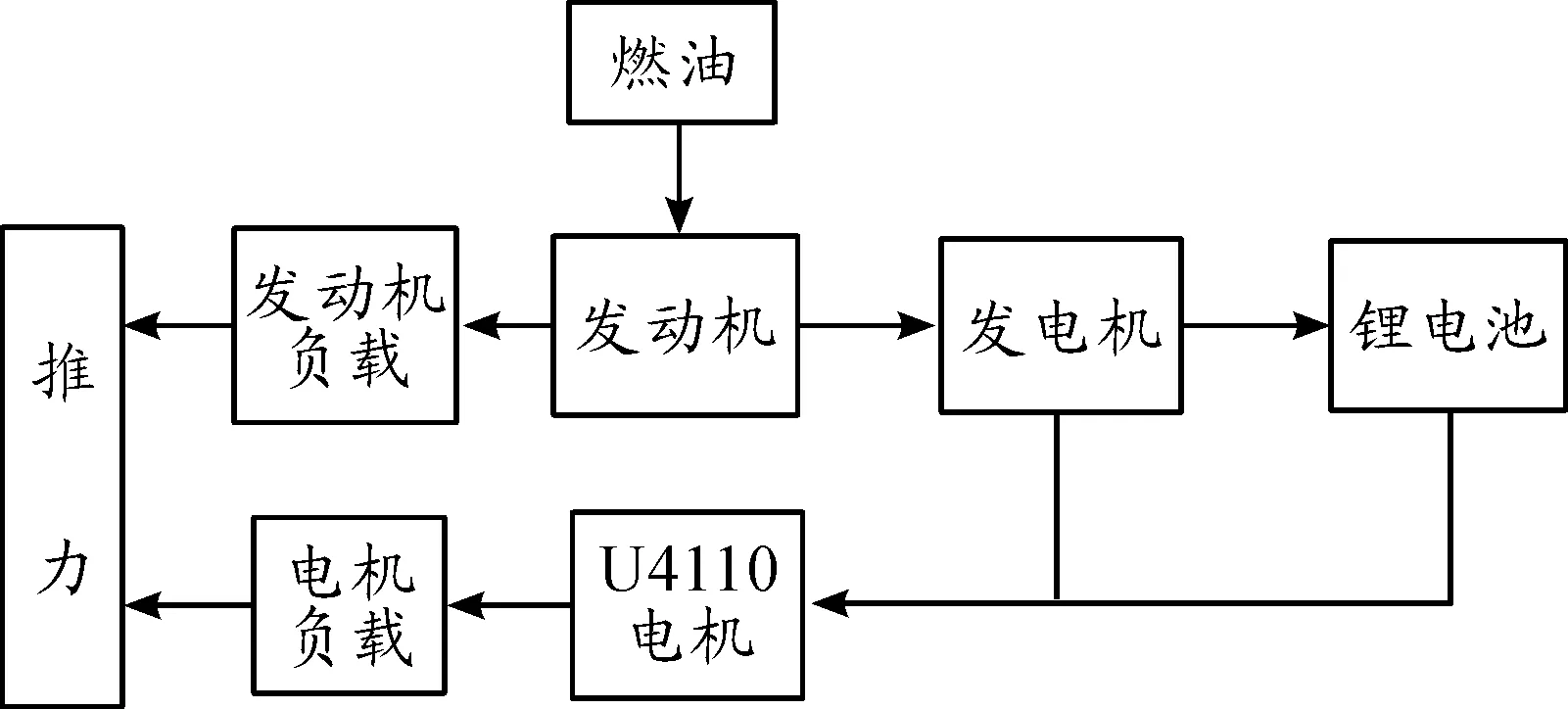
图14 较低速工况混合动力系统能量流动

图16 逻辑门限控制器模型
3.3 变论域模糊控制器设计
分析发动机和U4110电机2个动力输出装置,得到两者的动力输出效率,如图17所示。为在消耗较少燃油的情况下输出更多的动力,用模糊控制器对发动机转速和U4110电机输入功率进行匹配,对逻辑门限控制器进行优化,使系统动力输出效率增加。
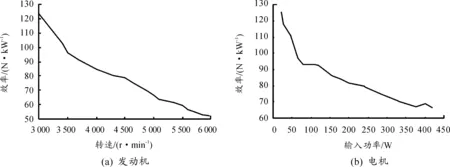
图17 动力输出效率
以发动机转速和电池SOC作为模糊输入,以发动机功率偏移调整系数和U4100电机输入功率调整系数作为模糊输出[14-15]。输入变量SOC隶属函数如图18所示,输入变量转速隶属函数如图19所示,输出变量发动机功率偏移系数隶属函数和输出变量电机功率调整系数隶属函数如图20所示。
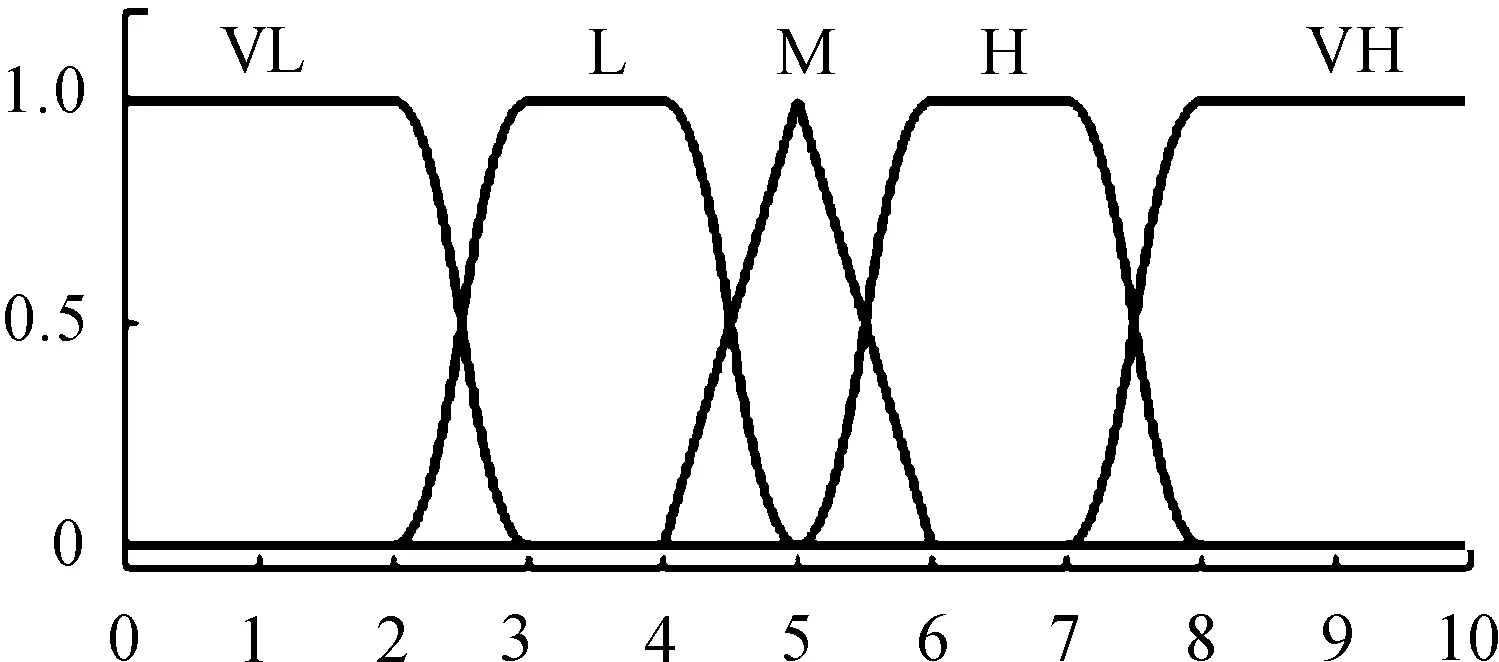
图18 输入变量SOC隶属函数
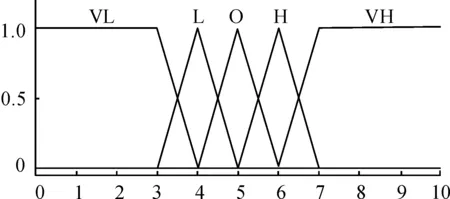
图20 输出变量隶属函数
根据经验与实验数据制定模糊规则表,如表3、4所示。用Simulink建立模糊控制器模型,如图21所示,主要分为输入变量模糊化、查模糊规则表和解模糊化3部分。转速实际输入范围为[2000,7000],电池SOC实际输入范围为[0,1],两路输出变量的真实值为[0,1],具体模糊化和解模糊过程可参考文献[16]。由于大气压力影响负载扭矩,故本模型在转速输入端加入了大气压力影响因子,可根据大气压力的变化调整转速输入变量的论域对应范围[17-18]。

表3 发动机功率偏移系数规则表
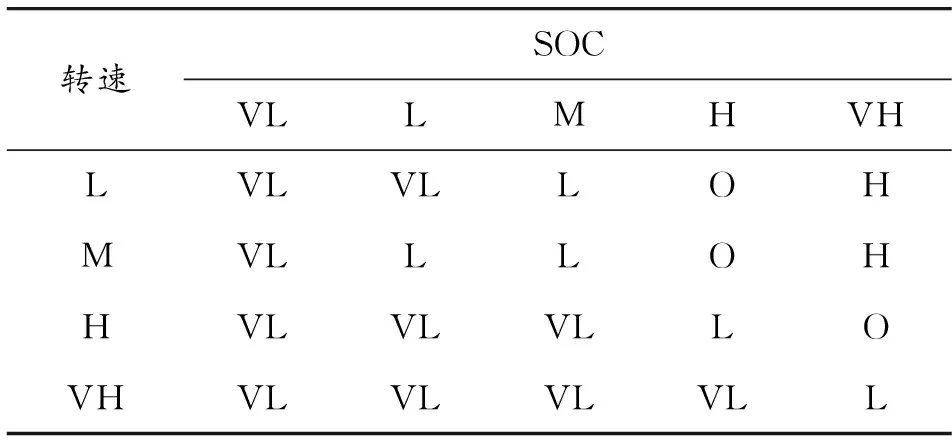
表4 电机功率调整系数规则表
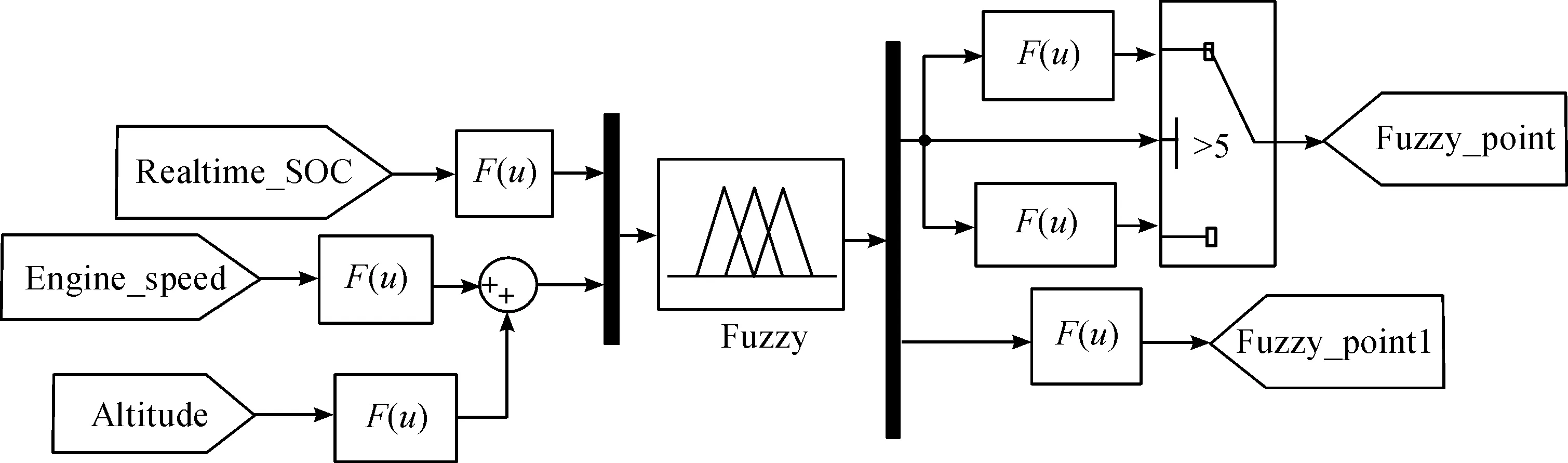
图21 变论域模糊控制器模型
4 仿真结果分析
为验证本文设计的控制策略的有效性,借助本文第2节建立的模型进行仿真分析。无人机尚未公布典型的仿真工况,为研究模型的全工况特性,本文采用如图22所示的转速工况点进行仿真研究。仿真模型的参数设置如表5所示。为研究电池SOC变化对控制参数的影响,电池容量取为10 000 mA,电池初始SOC值取为1,并且仿真全程关闭电池充电开关。
利用本文第2节中建立的混合动力模型,根据图22中的转速工况分别对逻辑门限控制策略和加入模糊控制器的控制策略进行仿真分析,将产生的总推力作为纯发动机模型的输入工况点,对纯发动机系统模型进行仿真,最后进行燃油消耗对比,仿真结果对比如表6所示。仿真结果显示:逻辑门限值控制策略耗油量降低19.1%,加入模糊控制器后耗油量较纯发动机工作模式耗油量降低24%。同时加入模糊控制器后,在相同转速工况下,混合动力系统在消耗更少燃油的情况下可产生更多的推力。图23和图24分别为2种控制策略下发动机的转矩对比和电池SOC变化对比,由于模糊控制器可根据电池电量调整对U4110电机和电动/发电机的供电,故电池在高电量下电能消耗快,在低电量下电能消耗慢。模糊控制器下发动机运行工作点如图25所示。

图22 发动机工作点转速
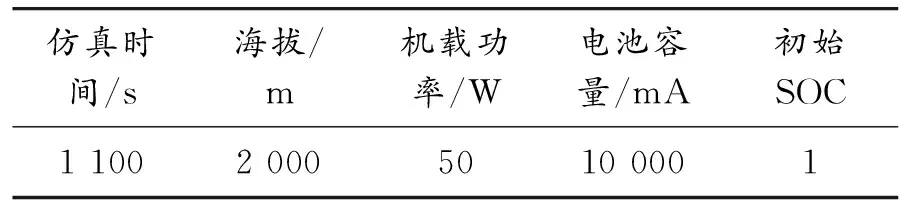
仿真时间/s海拔/m机载功率/W电池容量/mA初始SOC1100200050100001

表6 仿真结果对比
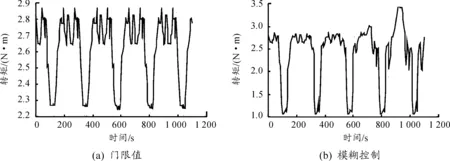
图23 两种控制策略发动机转矩对比

图24 两种控制策略SOC对比
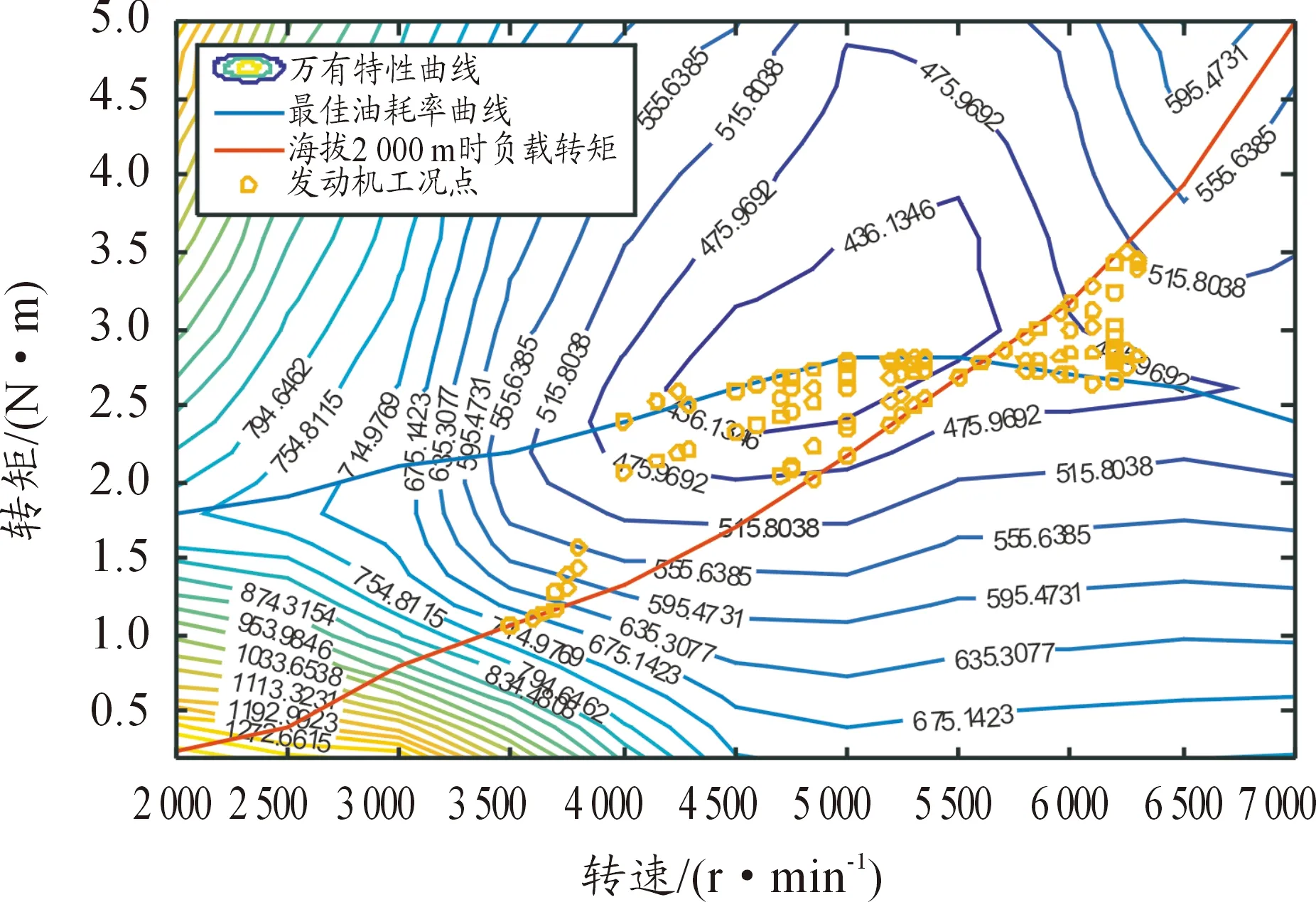
图25 模糊控制器下发动机运行工作点
5 结束语
本文设计了一个适用于小功率航空活塞发动机的混合动力系统,并且通过实验建模法利用Simulink软件建立了混合动力系统逆向仿真模型。在分析了发动机的万有特性曲线后,以发动机最佳油耗率曲线为依据,设计了基于规则的逻辑门限值的控制策略。另外通过分析发动机和U4110电机的推力输出效率,在逻辑门限值控制策略中加入了模糊控制器。最后在给定工况下进行了仿真。仿真结果表明:逻辑门限控制策略下该混合动力系统耗油量降低19.1%,加入如模糊控制器后混合动力系统油耗量降低24%,同时给出了两种控制策略下发动机的转矩变化曲线和电池SOC的变化曲线。
根据本文混合动力系统的设计理念,在混合动力模式下发动机转速在较低转速工况的时间越长越省油(相对于纯发动机模式),在较高速工况的时间越长,电池电能消耗越快,因此可根据预估飞行工况和飞行时间来搭载不同容量的电池。
参考文献:
[1]杨爱玲,孙汝岳,徐开明.基于固定翼无人机航摄影像获取及应用探讨[J].测绘与空间地理信息,2010,33(5):160-162.
[2]高龙波, 李本威, 张赟.无人机远航飞行轨迹优化研究[J].兵器装备工程学报,2016,37(3):94-97.
[3]徐静.固定翼无人机在新疆暴恐事件处置中的应用[J].警察技术,2015(3):88-91.
[4] 戴文瑞, 王建华. 无人机垂直陀螺仪及其链路健康状态评估研究[J].重庆理工大学学报(自然科学),2017,31(9):138-144.
[5]饶进军,高同跃,龚振邦,等.国外超小型固定翼无人机研究进展与关键技术[J].飞航导弹,2010(3):23-28.
[6]曹惠茹,李业谦,朱春燕,等.微型固定翼无人机机电性能测试与试验[J].测控技术,2016,35(11):22-24.
[7]CHEN I M,LIU T.Design and Analysis of Hybrid Systems for Scooters[J].Chinese Journal of Mechanical Engineering,2011,24(5):752-759.
[8]AIDOO I K,SHARMA P,HOFF B.Optimal controllers designs for automatic reactive power control in an isolated wind-diesel hybrid power system[J].International Journal of Electrical Power & Energy Systems,2016,81:387-404.
[9]郭秀红.混合动力电动汽车发动机建模与MATLAB仿真[J].中国农机化学报,2013(4):193-196.
[10]陈小国.混合动力车辆多领域统一建模与仿真[D].武汉:华中科技大学,2007.
[11]曾小华,宫维钧.ADVISOR 2002 电动汽车仿真与再开发应用[M].2版.北京:机械工业出版社,2017.
[12] 朱雁南,赵军红,陈海军.无刷直流电机系统仿真建模方法[J].兵器装备工程学报,2012,33(10):88-92.
[13] 刘希闻.电动汽车锂离子电池模型仿真与SOH研究[D].长春:吉林大学,2014.
[14] BOGARAJ T,KANAKARAJ J,CHELLADURAI J.Modeling and simulation of stand-alone hybrid power system with fuzzy MPPT for remote load application[J].Archives of Electrical Engineering,2015,64(3):332-336.
[15] 王加雪.双电机混合动力系统参数匹配与协调控制研究[D].长春:吉林大学,2011.
[16] 黄卫华.模糊控制系统及应用[M].北京:电子工业出版社,2012.
[17] NATSHEH E M,ALBARBAR A.Hybrid Power Systems Energy Controller Based on Neural Network and Fuzzy Logic[J].Smart Grid & Renewable Energy,2013,4(2):187-197.
[18] MAHTO T,MUKHERJEE V.A novel scaling factor based fuzzy logic controller for frequency control of an isolated hybrid power system[Z].Energy,2017.