基于统计建模的字典学习算法在HRRP的应用
2018-04-04袁家雯刘文波
袁家雯, 刘文波, 张 弓
(南京航空航天大学自动化学院, 江苏 南京 211106)
0 引 言
基于高分辨距离像(radar high resolution range profile, HRRP)的雷达自动目标识别能够准确反映目标本身物理结构信息及其在不同角度下散射点位置分布,使其在军事及民用领域得到了广泛的应用。HRRP是散射点沿雷达视线的一维投影[1],因其存在3大敏感性:姿态敏感性、平移敏感性和强度敏感性,不能直接用于目标识别,须进行预处理。一般采用平移不变特征解决平移敏感性,采用l2范数归一化解决强度敏感性[2-4]。姿态敏感性是三者中最难克服的问题,根据散射点模型理论,当雷达子回波位移超出雷达距离分辨率ΔL,散射点模型改变,发生散射点越距离单元走动(migrate through resolution cell,MTRC),实际情况下为避免发生MTRC,将方位限制于3°~5°,可近似认为散射点模型未发生变化。
目前克服姿态敏感性主要采用以下两类方法:一是基于统计建模算法,文献[5]将连续的HRRP样本等分为若干帧,提取各帧平均HRRP作模板,但是由于目标运动速度不同导致姿态变化也不同,所以等间隔分帧不合理。文献[6]使用概率主分量分析(probabilistic principle component analysis,PPCA)模型建模,利用Kullback-Leibler (KL)距离作为准则合并子帧,缺点是运算时间长。文献[7]通过观察谐波与基波的相关系数平均值变化,设定阈值判断是否划分角域。文献[8]提出混合概率模型对具有相同统计分布特性的HRRP进行自适应合并,但是其适用高信噪比环境,未考虑真实环境下HRRP常为低信噪比样本。二是构建字典学习模型,文献[9]基于K奇异值分解(K-singular value decomposition,K-SVD)算法迭代更新HRRP字典,有效改善模型性能,但是类别字典原子个数取原子维度6倍,原子冗余性较高。文献[10]基于鉴别字典(label consistent K-SVD,LC-KSVD)对合成孔径雷达图像域幅度和频域幅度信息进行多信息字典学习,然而根据联合动态稀疏表示模型下求解重构误差进行目标识别的准则有待改进。文献[11]提出稳健字典学习(stable dictionary learning, SDL)方法,SDL有效降低字典的冗余性,但是采用等间隔分帧HRRP样本训练子字典不合理。
针对上述问题,本文首先提出最大概率差值分帧算法划分HRRP角域,假设在一定角域内HRRP样本服从联合高斯分布,运用PPCA统计模型划分角域,其优点在于结合统计模型考虑目标姿态变化。其次,联合帧界线抽取姿态变化明显的样本构成鉴别字典初始化原子,使得字典原子个数相比其他字典学习方法大大减少,在降低原子冗余性的同时,也保留了姿态特征的多样性。字典训练阶段,基于LC-KSVD字典学习,引入原子稀疏相似误差,选择最大概率差值分帧(maxium probability difference framentation segment,MPDFS)在鉴别字典的最优权重,迭代更新最优字典和分类器;字典测试阶段,借助训练阶段的最优字典和原子稀疏相似误差,进行类型判别。最后,通过实测HRRP数据的实验验证所提方法的有效性。
1 基于PPCA的最大概率差值算法
1.1 PPCA模型

(1)
式中,Atf为投影矩阵;x为隐变量,服从高斯分布N(0,In),In为n维单位矩阵;μtf为第t类目标的第f子帧内平均向量;εtf为噪声向量,服从N(0,σ2Im)。所以第t类目标的第f子帧样本的类条件概率密度函数为
(2)
借助最大似然法求解模型参数近似解,即
(3)

1.2 最大概率差值算法

(4)
式中,θ为帧界线所在HRRP的序列号。借助贝叶斯公式计算后验概率,即

图1 MPDFS概率差值图
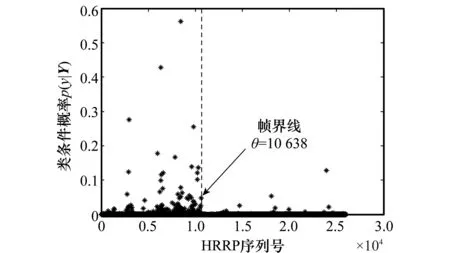
图2 MPDFS概率分布图
2 基于鉴别字典的HRRP目标识别
2.1 LC-KSVD字典学习
文献[15]提出基于LC-KSVD字典学习方法,围绕解决式(5)所示目标函数,结合重构误差、分类误差和稀疏编码鉴别误差3大误差,学习得到过完备字典D和最优线性分类器H,已将其成功运用到人脸识别和自然物体分类上。
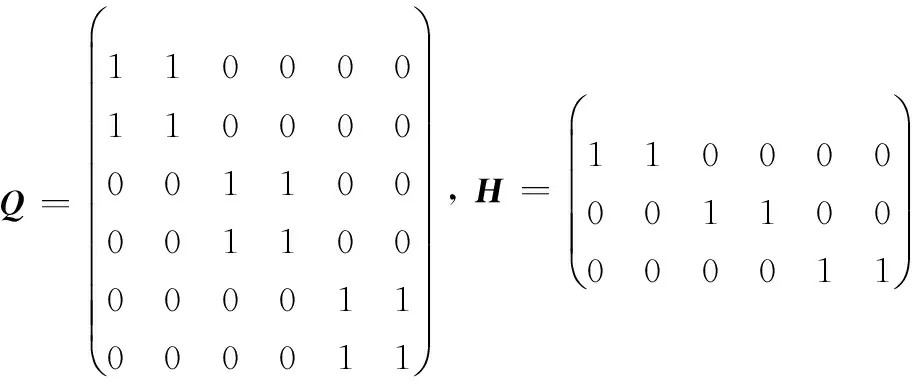
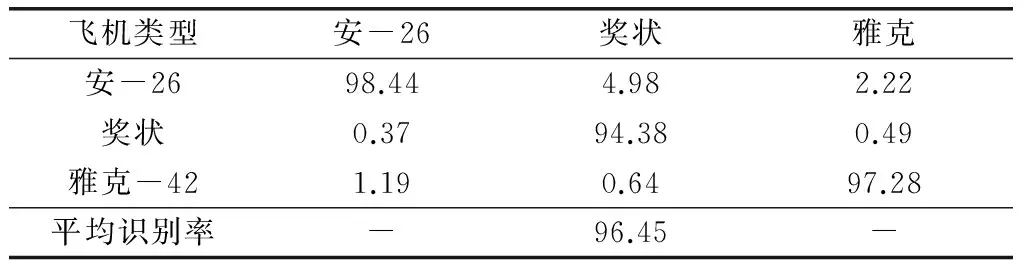
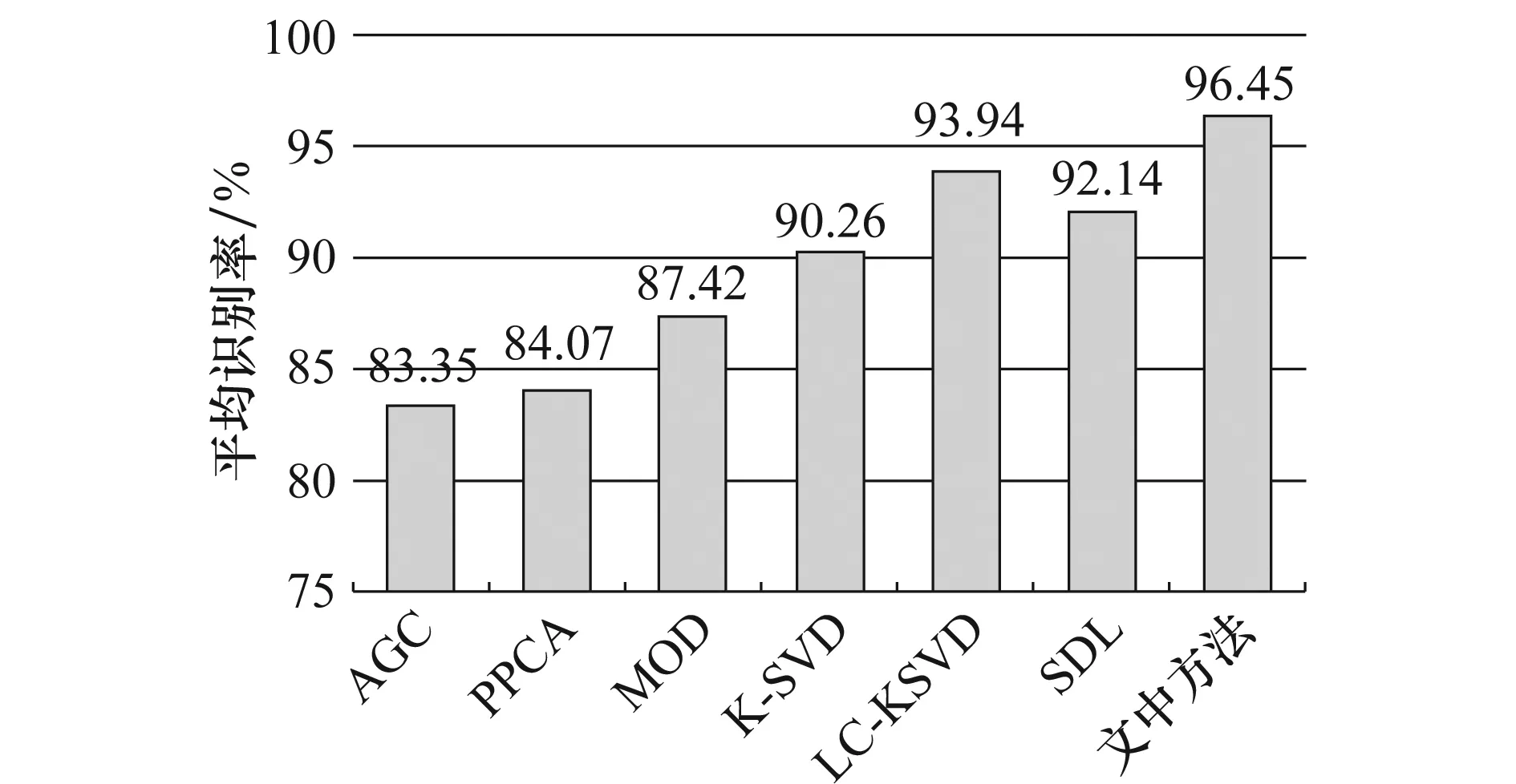
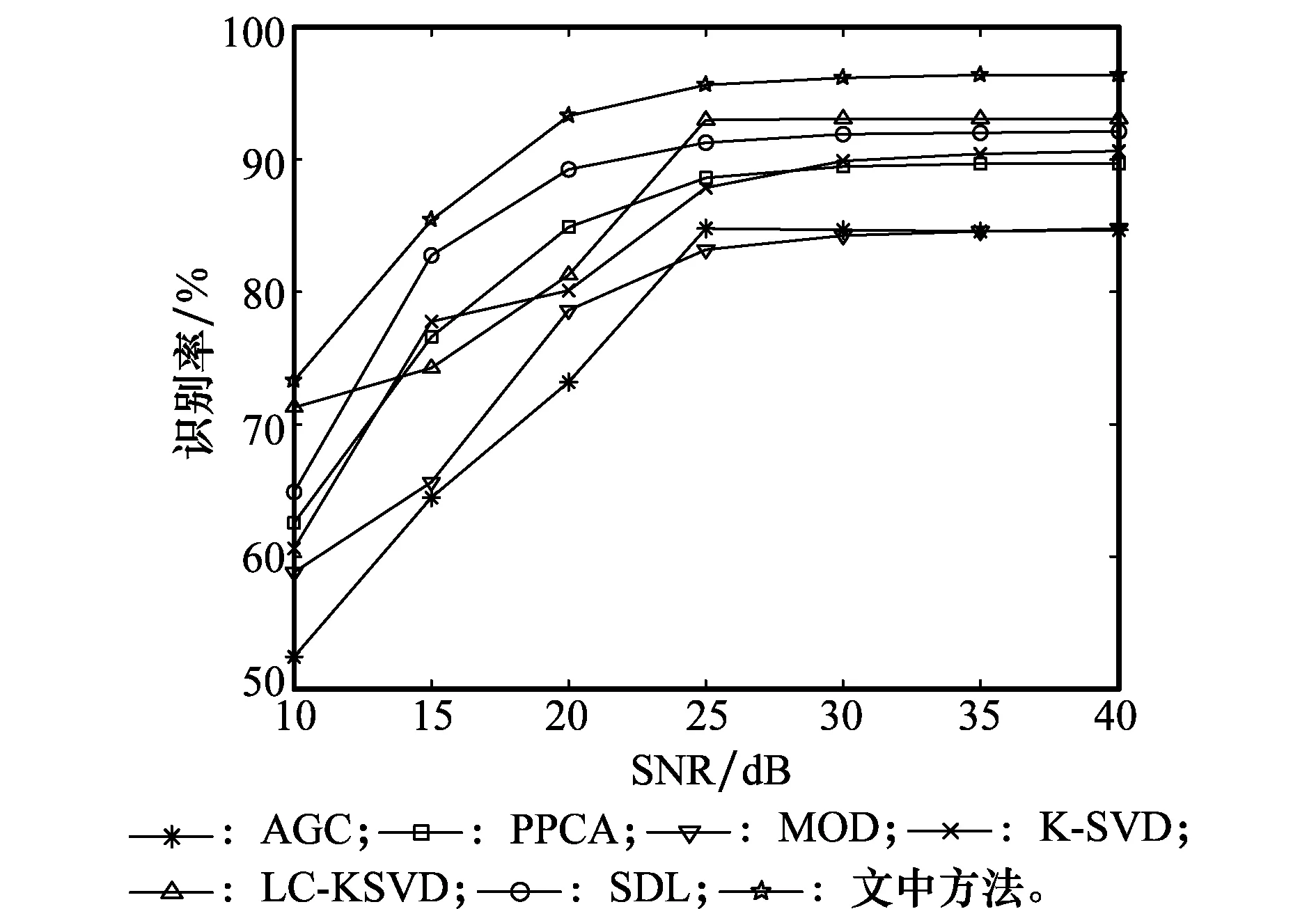
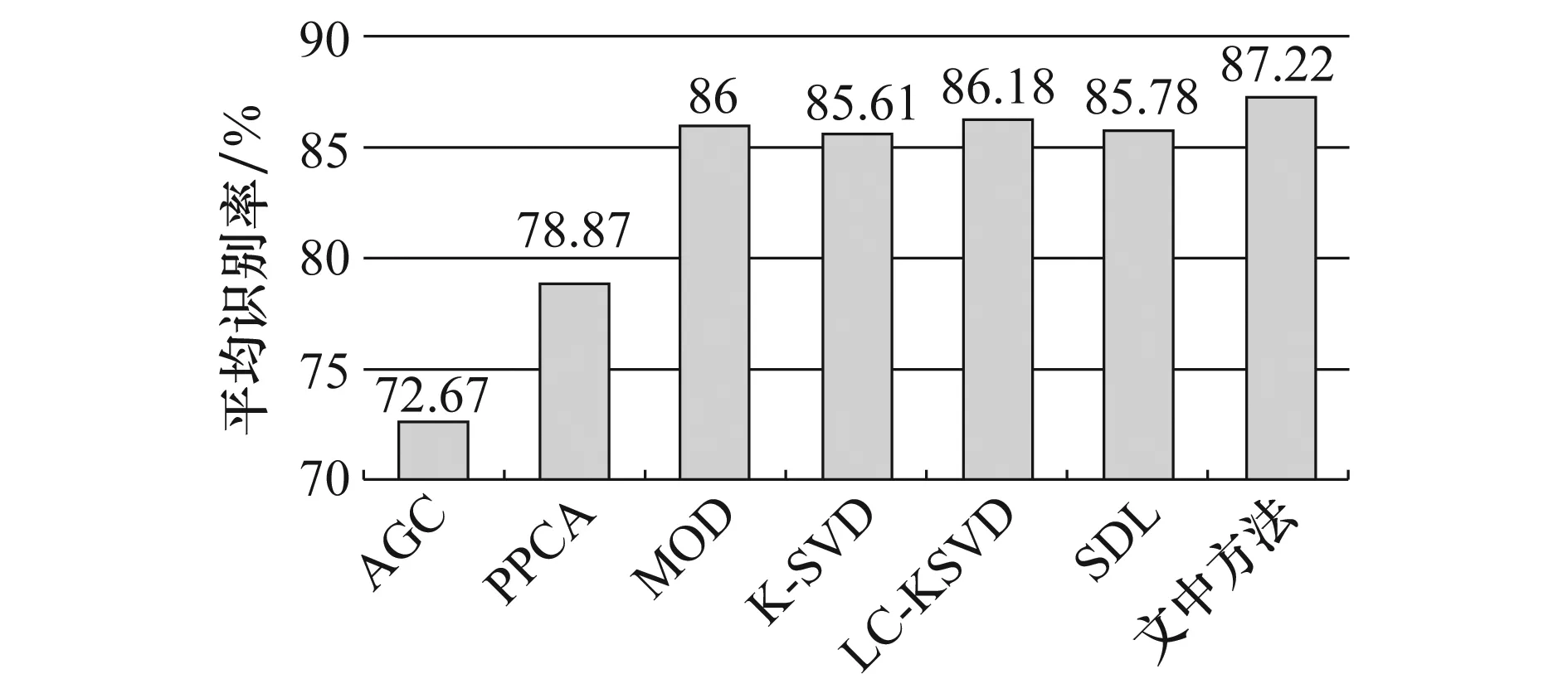
s.t.∀i∈[1,N],‖xi‖0 (5) s.t. ∀i∈[1,N], ‖xi‖0 (6) 目标函数可以转化成K-SVD求解过程,即 s.t.∀i∈[1,N], ‖xi‖0 (7) s.t.∀i∈[1,N], ‖xi‖0 (8) 针对HRRP目标识别,采用高信噪比HRRP数据作为训练样本,可以减少噪声对字典学习的影响,使得字典原子更好贴合样本特征。引入原子稀疏相似误差的LC-KSVD字典训练已知条件为 (1) 训练功率谱样本Y={y1,y2,…,yN}; (2) 矩阵Θ,令Θ={yθ1,yθ2,…,yθFT}; (4) 根据Y和D0所属目标类别,定义Q和H。 引入原子稀疏相似误差的LC-KSVD字典训练初始化条件为 (1) 设定字典5大训练参数为α、β、γ、K、L; X0=OMP(D0,Y,L),M0=OMP(D0,Θ,L)′ 结合字典训练已知和初始化条件,给出引入原子稀疏相似误差的LC-KSVD字典训练步骤如下: 步骤2稀疏编码阶段 步骤3按列更新字典阶段,即 更新x(k),j,即 x(k),j=Σ(1,1)V(:,1) 步骤4令k=k+1,若k>K,输出最优字典Dnew;否则返回步骤2继续循环。 已知某一待测试原始HRRP信号,基于鉴别字典的HRRP测试步骤如下: 步骤1数据预处理,原始HRRP信号经l2范数归一化后求取功率谱特征y。 式中,L为训练字典所取数值。 3.1.1飞机实测数据 本实验使用某逆合成孔径雷达实验雷达实测3类飞机数据:安-26、奖状、雅克-42,飞机飞行轨迹图如图3所示。实测雷达相关参数为:雷达中心频率5.5 GHz,带宽400 MHz。考虑飞机姿态和俯仰角变化,取安-26第5、6段,奖状6、7段和雅克-42第2、5段256维HRRP时域信号作为样本。经提出的MPDFS算法,安-26两段数据分别得到31个和39个帧界线,奖状两段数据分别得到26个和31个帧界线,雅克-42两段数据分别得到19个和30个帧界线,即Θaircraft∈R128×176。结合图3发现帧界线所在信号位于飞机姿态快速变化处,验证了MPDFS算法的正确性。每段训练样本个数为1 300,即在数据段中随机抽取1 300个HRRP时域样本,将时域HRRP数据预处理后进行鉴别字典训练,剩下HRRP样本作为测试。同时设置5大参数α=1,β=4,γ=1,K=40,L=20。 图3 飞机轨迹投影图 3.1.2舰船实测数据 舰船数据来源于某所实测的3类舰船数据舰艇A、舰艇B和舰艇C。考虑海杂波对的影响,舰船HRRP维度设置为350。经MPDFS自适应分帧后,舰艇A取156个初始原子,舰艇B取130个初始原子,舰艇C取94个初始原子,即Θwarcraft∈R350×380。每类舰船训练样本个数为1 000,测试样本个数为1 000。同时设置5大参数α=1,β=3,γ=1,K=50,L=25。 3.2.1飞机实验结果 表1给出了基于本文算法的飞机HRRP识别率,大部分文献对安-26识别率在93%上下浮动。考虑安-26飞行姿态多变性,两段飞行数据共选取70个帧界线,其较完整地囊括了飞机飞行姿态变化,使安-26识别率提高5%。 表1 3种飞机识别率 实验分别比较了HRRP应用在统计建模和字典学习两大体系下不同方法的识别结果,如图4所示,其中自适应高斯分类器(adaptive Gaussian classifier,AGC)[21]、PPCA是基于概率统计的识别算法,最优方向法(method of optimal direction,MOD)[22]、K-SVD、LC-KSVD和SDL则是字典学习的方法。对比字典学习3种方法,本文提出的算法中加入原子稀疏相似误差进一步优化分类准则,约束样本经字典线性表示的稀疏系数更适用于HRRP目标识别。 图4 基于飞机的7种方法识别结果 图5 不同SNR下各算法识别率对比 3.2.2舰船实验结果 本文算法对3类舰船的识别率如表2所示。目标平均识别率达到87.22%,其中舰艇A和舰艇C的识别率均在90%之上,而舰艇B中有15.23%的测试样本误判成舰艇A,其原因在于舰船A和舰船B从舰艇长度、宽度和吃水深度差距小。此外,由于对海环境远比对空环境复杂,常出现严重海杂波干扰,所以舰船HRRP识别率低于飞机HRRP识别率。 表2 3种舰船识别率 图6比较了基于统计建模和字典学习两类算法的舰船HRRP目标识别性能。从图6看出,对于低SNR舰船HRRP识别,本文方法识别率高于其他6种方法,说明在噪声干扰情况下,本文算法对噪声仍具有较好的稳健性 图6 基于舰船的7种方法识别结果 针对HRRP姿态敏感性问题,本文提出了一种基于PPCA的MPDFS算法,从概率统计角度自适应划分HRRP角域。结合MPDFS算法构成LC-KSVD初始化字典,在LC-KSVD字典学习基础上,引入原子稀疏相似误差约束优化判别准则,训练出适合HRRP应用背景的字典和分类器。雷达实测数据表明,所提方法进一步提高了目标识别率,尤其在低SNR条件下,仍较常用方法效果好。此外,针对海面HRRP目标识别,如何削弱海杂波对HRRP的影响还需讨论。 参考文献: [1] BAI X,ZHOU F,BAO Z,et al.High-resolution range profiles[J].IEEE Trans.on Geoscience and Remote Sensing, 2014, 52(5):2369-2381. [2] 郭尊华, 李达, 张伯彦. 雷达高距离分辨率一维像目标识别[J]. 系统工程与电子技术, 2013, 35(1): 53-60. GUO Z H, LI D, ZHANG B Y. Survey of radar target recognition using one-dimensional high range resolution profiles[J]. Systems Engineering and Electronics, 2013, 35(1): 53-60. [3] LIU H W, FENG B, CHEN B, et al. Radar high-resolution range profiles target recognition based on stable dictionary learning[J].IET Radar,Sonar and Navigation,2016,10(1):228-237. [4] 和华, 杜兰, 徐丹蕾, 等. 基于多任务复数因子分析模型的雷达高分辨距离像识别方法[J]. 电子与信息学报, 2015, 37(10): 2307-2313. HE H, DU L, XU D L, et al. Radar HRRP target recognition method based on multi-task leaning and complex factor analysis[J]. Journal of Electronics and Information Technology,2015,37(10):2307-2313. [5] DU L, LIU H W, BAO Z, et al. A two-distribution compounded statistical model for radar HRRP target recognition[J]. IEEE Trans.on Signal Processing, 2006, 54(6): 2226-2238. [6] 王鹏辉, 杜兰, 刘宏伟, 等. 雷达高分辨距离像分帧新方法[J]. 西安电子科技大学学报, 2011, 38(6): 22-29. WANG P H, DU L, LIU H W. et al. New frame segmentation method for radar HRRP[J]. Journal of Xidian University, 2011, 38(6) :22-29. [7] 但波, 姜永华, 李敬军, 等. 雷达高分辨距离像自适应角域划分方法[J]. 系统工程与电子技术, 2014, 36(11): 2178-2185. DAN B, JIANG Y H, LI J J, et al. Adaptive angular-sector segmentation method for radar HRRP[J]. Systems Engineering and Electronics, 2014, 36(11): 2178-2185. [8] 李彬, 李辉. 基于混合概率主成分分析的HRRP特征提取[J]. 系统工程与电子技术, 2017, 39(1):1-7. LI B, LI H. HRRP feature extraction based on mixtures of probabilistic principal component analysis[J]. Journal of Electronics and Information Technology, 2017, 39(1):1-7. [9] FENG B, DU L, LIU H W, et al. Radar HRRP target recognition based on K-SVD algorithm[C]∥Proc.of the IEEE CIE International Conference on Radar,2013. [10] 齐会娇, 王英华, 丁军, 等. 基于多信息字典学习及稀疏表示的SAR目标识别[J]. 系统工程与电子技术, 2015, 37(6): 1280-1287. QI H J, WANG Y H, DING J, et al. SAR target recognition based on multi-information dictionary learning and sparse representation[J].Systems Engineering and Electronics,2015,37(6): 1280-1287. [11] 冯博,陈渤,王鹏辉,等.利用稳健字典学习的雷达高分辨距离像目标识别算法[J].电子与信息学报,2015,37(6):1457-1462. FENG B, CHEN B, WANG P H, et al. Radar high resolution range profile target recognition algorithm via stable dictionary learning[J]. Journal of Electronics and Information Technology, 2015, 37(6): 1280-1287. [12] ZHANG X Z, QIN J H, LI G J. SAR target classification using Bayesian compressive sensing with scattering centers features[J].Progress in Electromagnetics Research,2013,136(4): 385-407. [13] DU L, LIU H W, WANG P H. Noise robust radar HRRP targets recognition based on multitask factor analysis with small training data size[J]. IEEE Trans.on Signal Processing, 2012, 60(7): 3546-3559. [14] DUDA R O, PETER E H, STORK D G. Pattern classification[M]. 2nd ed. New York: Wiley, 2001: 101-106. [15] JIANG Z L, LIN Z, DAVIS S. L. Learning a discriminative for coding via label consistent K-SVD[J]. IEEE Conference on Computer Vision and Pattern Recognition,2011,42(7):1697-1704. [16] AHARON M, ELAD M, BRUCKSTEIN A. K-SVD: an algorithm for designing overcomplete dictionaries for sparse representation[J].IEEE Trans.on Signal Processing,2006,54(11): 4311-4322. [17] WANG C, KONG Y. Radar HRRP target recognition based on coherence reduced stagewise K-SVD[C]∥Proc.of the General Assembly & Scientific Symposium, 2014:1-4. [18] BRYT O, ELAD M. Compression of facial images using the K-SVD algorithm[J]. Journal of Visual Communication and Image Representation, 2008, 19(4): 270-282. [19] ZHOU M Y, CHEN H J, PAISLEY J, et al. Non-parametric Bayesian dictionary learning for sparse image representations[C]∥Proc.of the Neural Information Processing Systems,2009:7-1. [20] WRIGHT J, YANG A, GANESH A, et al. Robust face re-cognition via sparse representation[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2009, 31(2): 210-227. [21] 陈凤,侯庆禹,刘宏伟,等.一种新的雷达HRRP自适应划分角域建模方法[J].西安电子科技大学学报,2009,36(3):410-417. CHEN F, HOU Q Y, LIU H W, et al. New adaptive angular-sector-segmentation algorithm for radar ATR based on HRRP[J]. Journal of Xidian University, 2009, 36(3): 410-417.

2.2 引入原子稀疏相似误差的LC-KSVD












3 实验结果与分析
3.1 实验数据

3.2 实验结果


4 结 论
