不同温湿度条件下AGV超声波避障系统研究
2018-04-02侯择尧祁宇明周鸿超周旺发
侯择尧,祁宇明,周鸿超,周旺发
(1.天津职业技术师范大学机器人及智能装备研究所,天津300222;2.天津博诺智创机器人技术有限公司,天津 300350)
0 引言
AGV能实现对位置的精确控制和对轨迹的跟踪,辅以智能控制等相关设计会对生产带来极大的帮助。目前AGV避障可采用超声波传感器、红外传感器、激光传感器和视觉传感器等。使用红外传感器的三角测距方法虽然成本低,但避障效果不可靠,对于黑色物体就无法有效躲避;使用激光传感器对于玻璃等透明物体的探测还是受限于光束的物理特性,无法全部有效探测;使用视觉传感器成本比较高,现阶段技术还不完善,存在探测盲区的问题,使用超声波传感器能克服以上不足,但要排除不同温湿度的影响[1]。
本文对不同温湿度条件下AGV超声波避障系统的性能进行了研究,运用Arduino单片机[2],通过建立数学模型,在温湿度不同时,测得与障碍物之间的距离,经过大量的试验,在温湿度不同时测得的距离差异并无太大的不同,对AGV避障预警具有重要意义[3]。
1 设计原理
1.1 AGV避障系统的组成
本文研究的AGV避障系统一共由5部分构成。第1部分是由Arduino单片机的控制板和Arduino单片机的外层电路构成;第2部分是由超声波发射和接收器构成;第3部分是由检测温湿度的传感器构成;第4部分是由能够实时显示数据的器件构成;最后一部分是由具有在突发意外情况下报警的警报装置构成,其系统整体结构框图如图1所示。超声波测距装置与障碍物之间的距离是通过超声波发出的时间与收到超声波的反射时间之差来确定的,同时配备一块1 602液晶显示屏,记录实验数据,方便实验者观察。
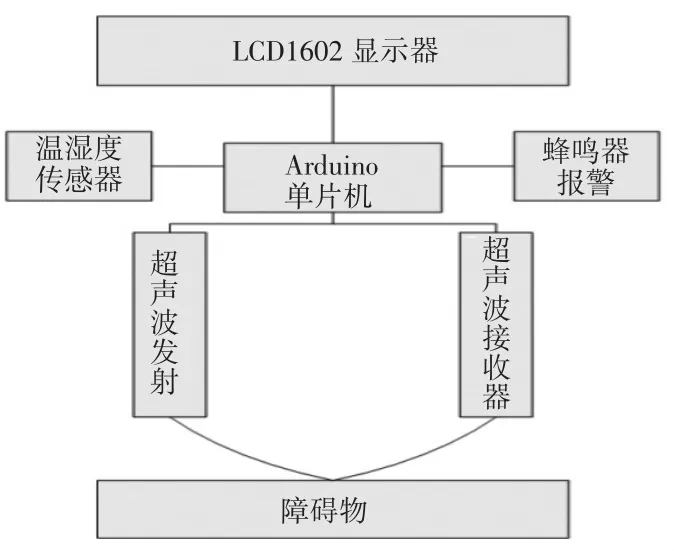
图1 系统整体结构框图
1.2 超声波测距原理
在此次实验中,超声波测距的运用的超声波形式为脉冲反射式。超声波测距的过程是首先向一个预定的方位发射,在发射的同一时刻需要记录下时间,在发射出去进行传播的过程中如果传播的前方存在阻碍,便会被反射回来即沿着反射的方向传播,之后便会被接收装置探测到,同时记录下接收到的时刻,经过一定的计算便可得知传播的距离,这便是超声波测距的原理。根据不同温度和湿度对超声波在空气中传播速度的影响,折算出温湿度系数k,测得超声波装置与障碍物之间距离的不同数值,去判断温湿度不同时对AGV避障报警的影响,通过计时器记录的时间,就可以计算出发射点距障碍物的距离。
超声波传播速度为:

温湿度系数k为:

发射点距障碍物的距离S为:

式中:t0=(T2-T1)/2,t0是超声波从发射到接收的时间间隔的一半,T1是超声波发射的时刻,T2是超声波接收的时刻,t为摄氏温度,Pw是空气中水蒸气的分压强,P是大气压强,△t是超声波从发射到接受的时间间隔,S是发射点距障碍物的距离,V是超声波在空气中的传播速度。
2 硬件设计
2.1 Arduino控制板
本实验需要12路数字信号输入输出接口,Arduino Mega2560单片机能够满足本实验要求[4],其核心电路板是ATmega2560.
2.2 超声波模块
本实验用的超声波模块为HC-SR04,其需要通过IO触发来达到测量距离的目的。当给它一个10 us的高电平信号之后,它便会产生8个40 kHz的方波,如果接收不到返回的信号,便不会输出高电平,反之相反,其整个过程所需要的时间和超声波由发射传播到接收的时间长短相等。
2.3 液晶显示模块
本实验采用的显示器型号为LCD1602,采用它的好处优势很多很明显,譬如屏幕显示信息清晰、本身体积小占用空间少、耗能少节约能源等。
2.4 实验电路连接
各个模块与Arduino板连接的电路图如图2所示,实物连接图如图3所示。
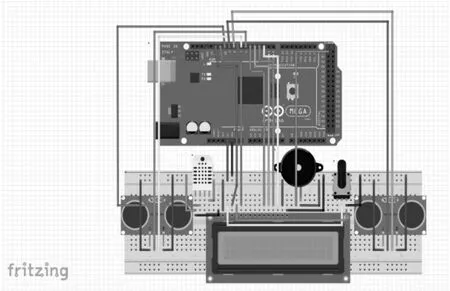
图2 电路连接图
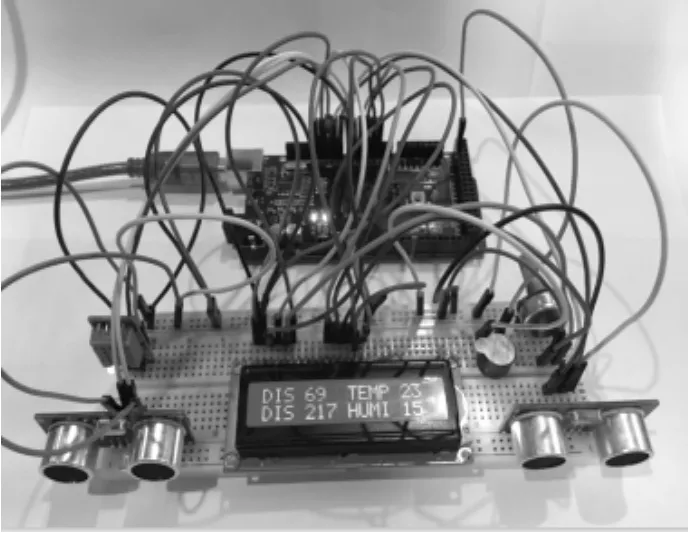
图3 实物连接图
3 上位机编程
在本实验中,其流程如图4所示。系统初始化完成之后超声波传感装置产生脉冲信号,信号开始传播,在信号传播的过程中若遇到障碍,便会发生反射,会沿着反射的方向进行传播,经过一定的时间,信号便会被接收装置接收,由发射到接收的时间信息会被送到Arduino控制板上,计算得到其传播的距离,其距离的数值会在液晶屏上显示出。环境温度的信息也会送至Arduino控制板上处理后显示出来[5-6]。
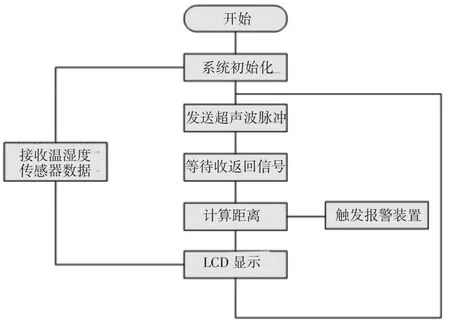
图4 实验流程图
超声波测距子程序如下:
void loop()
//产生一个10us的高脉冲去触发TrigPin 3333333333333333
digitalWrite(TrigPin1,HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin1,LOW);
distance[0]=pulseIn(EchoPin1,HIGH)/58;delay(60);//延时 60ms
4 实验结果
本文将各个模块和相关线路、实验板与Arduino控制板结合起来可视为AGV本体,其超声波模块及其相关控制部分作为AGV避障系统,使用一个5 cm×5 cm固体小盒作为障碍物,保证超声波装置与障碍物之间的距离固定为2 m,在温度在20℃~45℃,湿度45%~70%之间(即温度和湿度均属于常规范围内)进行实验。实验是在一个封闭的实验室内进行经过测试,采用空调控制温度,采用加湿器提高湿度,去湿机降低室内湿度,并采用温湿度计实时监测室内的温湿度并及时调控,经过实验,得到了不同温湿度下AGV与障碍物之间距离值[7]。实验条件和结果如表1所示。

表1 不同温湿度下AGV与障碍物之间的固定距离
按照温度和湿度对应的情况,测得上表两组数据,每组数据均是由五次测量取的平均值,由第一组数据发现当温度为20℃、湿度为45%时AGV与障碍物之间的固定距离为40.15 cm,温度为45℃、湿度为70%时AGV与障碍物之间的固定距离为40.09 cm,距离相差很小,在实际应用中这种差值可以忽略,而且从最小温湿度到最大温湿度,AGV与障碍物之间的固定距离没有连续变化的规律,而是随机的。在不同时间下测得另一组数据显示的规律与第一组数据一致,而且这两组数据结果差值很小,在实际应用中也可以忽略。以上数据证明在不同温湿度时测得的距离差异不大,对AGV避障基本无影响。
5 结束语
本文基于不同温湿度条件下AGV避障系统研究,通过测试在常规温湿度不同时AGV与障碍物之间的固定距离的差异,经过大量的试验,表明在温湿度不同时测得的距离差异并无太大的不同,对AGV在不同温湿度情况下避障预警具有重要意义。
参考文献:
[1]陈 雷.点评多国仪器展中的传感器[J].国外电子测量技术,2012(2):19-23.
[2]何立民.单片机应用系统设计[M].北京:北京航空航天大学出版社,1997.
[3]刘楚红,董 镇,钱宇捷,等.基于Arduino的倒车雷达系统设计[J].现代电子技术,2014,37(17):148-150,153.
[4]夏路易.智能仪表设计与接口技术[M].太原:太原理工大学出版社,2009.
[5]陈吕洲.Arduino程序设计基础[M].北京:北京航天航空出版社,2014:5-6.
[6]Arduino Software Release Notes.Arduino Project[Z].2011.
[7]温 和,王 水,滕召胜,等.噪声影响下的高准确度介损角测量方法研究[J].仪器仪表学报,2013,34(4):780-785.
