PXW型摆辗机摆头运动学分析及摆头运动轨迹研究
2018-03-28杨建东龚小涛
耿 佩,党 杰,杨建东,龚小涛
(西安航空职业技术学院,陕西 西安 710089)
摆动辗压简称摆辗,最早出现在20世纪30年代。它是一种局部加压的连续成形技术,具有省力、零件尺寸精度高、振动小、噪声低等诸多优点,正在逐步取代传统锻压加工中工具与坯料间断续(冲击式)、整体式接触施压方式[1],因此可以用较小吨位的设备来成形较大的锻件,且可使成形件精度及对复杂形状零件的实用性、劳动条件等得到较大改善。
摆碾成形基本原理如图1所示。摆头中心线OZ与机器主轴中心线OM相交成角,此角称为摆角。当主轴旋转时,OZ绕OM旋转,于是上模便产生了摆动。与此同时,下模在油缸作用下上升,并对毛坯施压,这样上模母线就在毛坯上连续不断地滚动,最后达到整体成形地目的。相当于锥体沿母线在工件上滚动+滑动,接触面偏向一旁,即机床承受周期变形偏心载荷。摆头与坯料之间的接触面积是整体投影面积的1/n(n=5~10)倍,变形力仅为原来的1/n[2]。

图1 摆辗原理示意图
由波兰人设计制造的PXW型摆辗机是摆辗原理机型,也是最早投入生产的机型,并一直沿用至今。该机型主要特点是摆辗机摆头具有4种运动轨迹,可适应不同的加工场合[3]。后来研发出的摆辗机设备及其研究内容也主要是围绕PXW摆辗机来展开的。
1 摆头运动学分析
PXW型摆辗机摆头运动轨迹即为摆杆的运动轨迹,它是由两个独立的分支传动链来驱动两个偏心套(内、外偏心套)转动来实现的。由此可将摆头运动特征用内、外偏心套模型来表达,如图2所示。其中内偏心套圆心为 O1,外偏心套圆心为O,摆杆端面中心为O2。外偏心套绕其几何中心O旋转,内偏心套绕其几何中心O1旋转。外偏心套旋转时带豆内偏心套旋转(公转),而内偏心套旋转(自转)时,不影响外偏心套旋转。改变内外偏心套旋转速度和方向,可实现其同速同向、同速异向、异速同向和异速异向4种组合运动[4,5]。
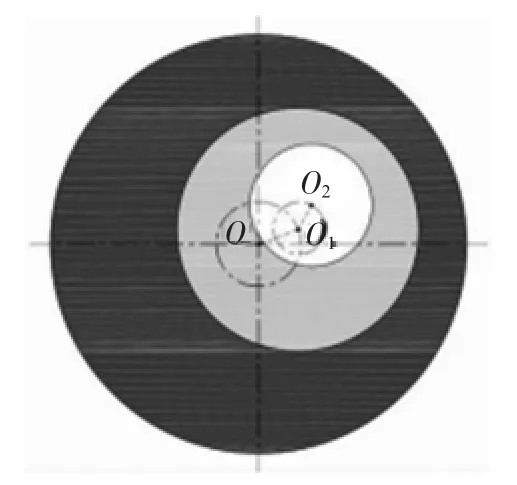
图2 内外偏心套模型
为进一步研究PXW型机内、外偏心套摆头的运动轨迹,简化图2所示双偏心套模型,换用矢量方法来表示,摆头运动轨迹的水平投影可用图3中矢量的终点位置来表示,它是由内、外偏心套两个旋转运动而合成的,其中内、外偏心套的偏心距为r,矢量的矢径与极坐标的角度分别为:

图3 内外偏心套矢量模型

φ——摆头瞬时转角;
t——时间(min)。
2 摆头运动轨迹分析
基于上述摆头内、外偏心套运动模型,利用MATLAB软件对内、外偏心套不同运动方向和速度的组合情况进行模拟分析,发现:当内、外偏心套同向同速运动时,摆头的运动轨迹是以外偏心套几何中心O为中心,半径为2r的圆形轨迹,如图4a所示;当内、外偏心套同速反向旋转时,摆头轴端中心点运动轨迹是以外偏心套几何中心O为中心,长度为4r的一条直线,如图4b所示;当内、外偏心套异速同向旋转时,摆头轴端中心点运动轨迹是螺旋线,且螺旋线运动范围在半径2r的圆内,如图4c所示;当内、外偏心套异速异向旋转时,摆头轴端中心点运动轨迹是多叶玫瑰线,且多叶玫瑰线运动范围在半径为2r的圆内,如图4d所示。

图4 PXW型摆辗机摆头运动轨迹
3 摆头螺旋线运动轨迹形成过程

4 结论
基于PXW摆辗机内、外偏心套运动模型,通过运动学分析,建立摆头矢量坐标方程;运用MATLAB软件对内外偏心套不同运动组合进行数值模拟,验证了当内、外偏心套同向同速、同速反向、异速同向及异速异向旋转时,摆头运动轨迹分别为圆形、直线、螺旋线和多叶玫瑰线;模拟分析得出螺旋线运动轨迹的形成规律:在0-π时刻,摆头轴端中心点逐渐靠近轴心并同时做螺旋式上升;在π-2π时刻,摆头轴端中心点逐渐远离轴心并做螺旋式上升。

表1 螺旋线形成过程示意图
[1] 胡亚民,伍太宾,赵军华.摆动辗压工艺及模具设计[M].第二版.重庆:重庆大学出版社,2008.
[2] 冯文成,姚万贵,蒋 鹏.摆辗机新型螺旋线运动轨迹研究[J].锻压装备与制造技术,2014,49(2):37-39.
[3] 温正中忠,诸文俊,胡亚民.PXW型摆辗机摆动机构运动学问题初探[J].金属成形工艺,1999,17(3):1-3.
[4] 刘汉贵,黄少东.波兰PXWP-100C型摆辗机摆头运动轨迹设计的数学依据[J].重型机械,1991,(5):18-20.
[5] 龚小涛.汽车半轴摆辗工艺设计及模具失效分析[J].热加工工艺,2015,(1):159-160.
