实船耐波性预报系统开发与应用
2018-03-28,,
, ,
(1.高速水动力航空科学技术重点实验室,湖北 荆门 448035;2.中国特种飞行器研究所,湖北 荆门 448035)
Visual Studio是美国微软公司的开发工具包系列产品,它具有基本完整的开发工具集,所写的目标代码适用于微软支持的所有平台[1]。
船舶耐波性是船舶在波浪中运动特性的统称,它包括船舶在波浪中所产生的各种摇荡运动以及由这些运动引起的砰击、飞溅、上浪、失速、螺旋桨飞车和波浪弯矩变化等。船舶在任意时刻的运动可以分解为O-xyz坐标系内船舶重心沿3个坐标轴的直线运动及船体绕3个坐标轴的转动。这些运动又分为单向运动和往复运动,因此共有12种运动形式。船舶摇荡运动中横摇、纵摇和垂荡对船舶航行影响最大,是船舶摇荡运动研究的主要内容。遭遇浪向在左右舷之间0°~15°时称为顺浪,遭遇浪向在左右舷之间165°~180°时称为顶浪。顺浪和顶浪统称为纵向对浪,纵向对浪主要产生纵向运动,它包括纵摇、纵荡和垂荡。遭遇浪向在左右舷之间75°~105°时称为横浪,横浪主要产生横向运动,它包括横摇、艏摇和横荡。遭遇浪向在左右舷之间15°~75°时称为尾斜浪,遭遇浪向在左右舷之间105°~165°时称为首斜浪。尾斜浪和首斜浪既产生纵向运动,又产生横向运动。为了预报实船在海浪上的性能,必须对海浪进行研究。波面可以用简单函数表达的波浪称为规则波。规则波不仅能近似表示涌,还是研究不规则波的基础[2]。
本文基于规则波的波面进行耐波性预报[3-4]。在拖曳水池对船模进行拖曳,通过船模试验测得船模耐波性数据,再根据船模与实船之间的换算关系式得到实船耐波性数据。通过本文提出的耐波性预报系统可以直接由船模数据得到实船数据,为船舶试验设计专用软件的开发及应用奠定基础。
1 系统预报模型[1]
1.1 遭遇频率
设船以航速v在规则波(波长为λ,速度为c)中航行,船的航向与波浪传播方向夹角为β,如图1所示。

图1 船在规则波中的航行示意图Fig.1 Sketch map of ship moving in regular wave
波浪作用于船的遭遇周期
(1)
遭遇频率
(2)
无因次频率换算公式为

(3)
式中:ω为频率;L为垂线间长;g为重力加速度。根据式(1)和式(2)可得出船舶的遭遇频率。
1.2 频率响应函数
船舶的耐波性预报主要对平均阻力增量、角度双幅值、升沉双幅值、艏部加速度双幅值、舯部加速度双幅值和艉部加速度双幅值等进行分析,因此首先必须得出它们的频率响应函数。在波浪作用下船体的动态特征可以用频率范围内的频率响应法来描述。船舶的频率响应函数
(4)
1.3 谱密度函数
规则波中的船舶研究是不规则波中船舶研究的基础。除了船舶的无因次频率响应函数曲线,还要根据船舶航区的特点和气象条件确定航区的三一波高和谱心周期,进而计算出相应的谱密度函数,最终才能对实船耐波性进行预报。
第十一届国际船模水池会议(ITTC)和国际船舶结构会议(ISSC)先后推荐双参数波谱,它的一般形式为
(5)
式中:ξωβ为三一平均波高;T1为谱心周期。
双参数波谱不仅适用于充分发展的海浪,还适用于成长中的海浪或含有涌浪成分的海浪。
当船舶以某一航速在规则波中航行时,波浪对船舶的扰动力频率为ωe,因此作为输入的波浪谱密度应以扰动力频率ωe表示,而不是以自然频率ω表示。以不同频率表示谱密度时,遭遇谱下面的总面积与原来波谱下面的总面积应相等,也就是谱密度曲线下的微面积所代表的能量并未发生变化,因此存在以下关系:
Sξ(ωe)dωe=Sξ(ω)dω
(6)
由式(6)求导可得
(7)
1.4 谱距
对于线性系统,不规则波的随机扰动输入和输出均为谱密度函数,输出的谱密度等于输入的谱密度乘以频率响应幅值算子,其对应关系为
Sy(ω)=Sξ(ω)|Yyξ(ω)|
(8)
谱密度对原点的n阶距表示谱密度对原点的分布情况,其表示形式为
(9)
式中:n=0,2,4,…;mn为谱距。
2 系统分析[5-7]
2.1 耐波性预报系统分析
实践发现,在进行船模拖曳试验时,可以采用规则波模型试验并通过谱分析方法对实船进行耐波性预报。因为规则波不仅能近似表示涌,还是研究不规则波的基础。在实船耐波性预报中,通常使用已测得的波高资料,并选用某一理论分布进行拟合,以便达到外延的目的。利用谱分析法预报实船在不规则波中的性能,需要对航行海区的海浪谱密度进行估算。实测一个海区的海浪谱是相当麻烦的工作,因此海洋工作者和造船工作者根据大量的海上观测和理论工作得到了各种海浪谱的表达式。本文耐波性预报系统采用的是ITTC提出的波谱公式。
2.2 系统任务需求分析
一般情况下耐波性预报系统的主要任务是:根据船模在水中的运动规律来建立数学模型,然后利用船模在水中拖曳的试验数据对实船的耐波性进行预报。传统的实船预报过程采用Excel进行实船预报,预报过程复杂,每次试验都要建立计算公式,并且多次重复计算同一个公式,界面繁琐,预报过程麻烦、易出错。本文系统立足于简化设计人员的操作过程,提高设计效率,降低出错率,缩短耐波性预报周期。
2.3 系统原理设计
针对工程计算问题提出可视化输入输出的程序化设计思路,初始界面如图2所示。读取的文件是txt格式,如图3所示。输出界面如图4所示,保存的文件是txt格式。
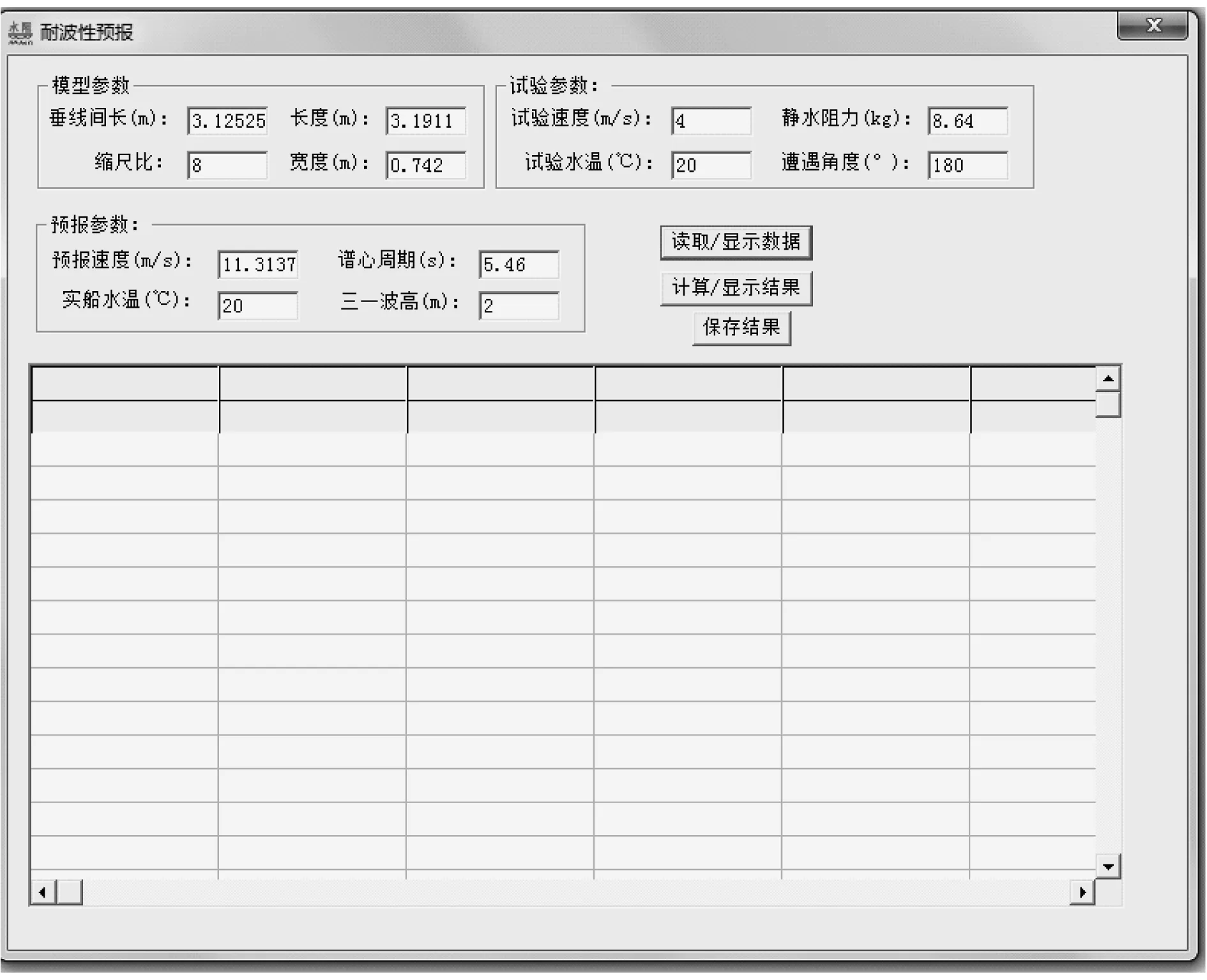
图2 耐波性预报系统的初始界面Fig.2 Initial interface of sea-keeping forecasting system
在图4的输出界面中,计算输出的值有平均阻力、角度双幅值、升沉双幅值、艏部加速度双幅值、舯部加速度双幅值、艉部加速度双幅值。在界面截图时,由于滚动条只能位于一侧,因此其余地方看不到。
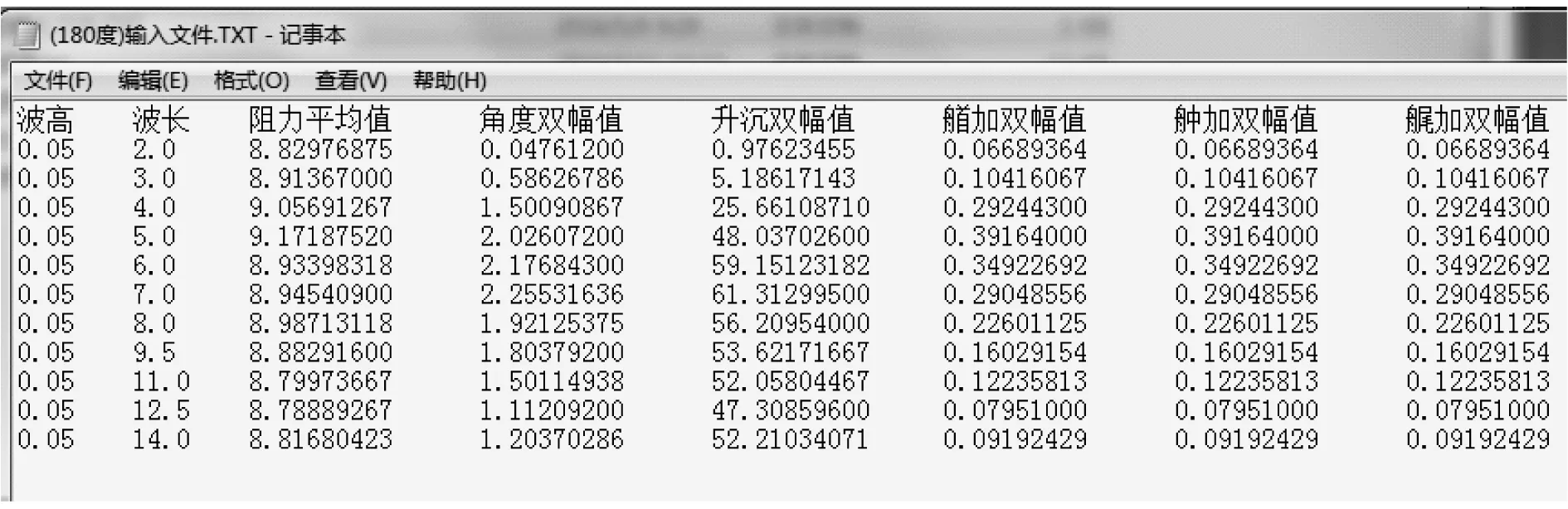
图3 耐波性预报系统的读取文件Fig.3 Read file of sea-keeping forecasting system

图4 耐波性预报系统的输出界面Fig.4 Output interface of sea-keeping forecasting system
在保存文件中,保存的是符号说明、输入变量、计算结果。其中,计算结果包括平均阻力、角度双幅值、升沉双幅值、艏部加速度双幅值、舯部加速度双幅值、艉部加速度双幅值。
(1)系统功能分析
预报系统设置的界面为默认初始环境,因此只需输入测得的船模试验数据,点击计算按钮,预报系统会自动输出并保存实船的耐波性预报数据。计算程序均为Windows系统可执行程序,满足推广应用的要求。
(2)实例验证
本文分别利用规则波180°遭遇角与90°遭遇角对耐波性预报系统进行验证。根据式(1)~(6)计算得到的结果与系统计算结果进行比较,误差均在0.3%以内。如平均阻力的谱密度公式计算值为0.004 589 387 734 221 46,耐波性预报系统计算值为0.004 6。
误差来源如下所示:
(1)水的质量密度。谱密度公式使用的数据为淡水质量密度998.1 kg·m-3,海水质量密度1 024.7 kg·m-3;耐波性预报系统使用的数据为淡水质量密度998.144 kg·m-3,海水质量密度1 024.742 kg·m-3。预报系统是根据第十届ITTC给出的数据来拟合的温度与密度、温度与黏性系数的方程。
(2) 圆周率。圆周率谱密度公式计算值为3.141 592 653 589 79,耐波性预报系统计算值为3.141 592 654。
(3)输出位数。系统设置的保存位数是4位小数,而谱密度公式计算值保留位数随机。
3 结论
本文分析了实船耐波性预报的一般需求,提出了实船耐波性预报系统的设计思路与系统功能结构。本文的耐波性预报系统具有以下特点:
(1)针对工程计算问题提出可视化输入输出的程序化设计思路。
(2)提高工作效率,降低出错率,缩短产品研制周期。
(3)计算的程序均为Windows系统可执行程序,满足推广应用要求。
(4)减少了实船耐波性预报时间,简化了设计人员的操作过程,提高了设计效率。
[1] 吕鑫.VC++就业培训宝典之MFC视频教程[M].北京:机械工业出版社,2014.
LÜ Xin.MFC video tutorial of employment training collection of VC++ [M].Beijing:China Machine Press,2014.
[2] 盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2008.
SHENG Zhenbang,LIU Yingzhong. Ship principle[M].Shanghai:Shanghai Jiaotong University Press,2008.
[3] 孙平,王丽萍,蒋志强,等.基于Visual Studio的洪水预报系统开发与应用[J].中国农村水利水电,2015(2):126-128.
SUN Ping,WANG Liping,JIANG Zhiping,et al.The development and application of flood forecasting system based on Visual Studio [J]. China Rural Water and Hydropower,2015(2):126-128.
[4] 刘东旭,刘东,何新林,等.洪水实时预报系统的集成研究[J].水资源与水工程学报,2005,16(4):15-19.
LIU Dongxu,LIU Dong,HE Xinlin,et al. Study of flood forecasting system of integration[J].Journal of Water Resources & Water Engineering,2005,16(4):15-19.
[5] 陈宗煌,许勇,董文才.船舶耐波性试验测量数据处理系统开发及应用[J].船海工程,2014,43(3):33-40.
CHEN Zonghuang,XU Yong,DONG Wencai.Development and application of measured signal analysis system for ship sea-keeping test[J].Ship & Ocean Engineering,2014,43(3):33-40.
[6] 李宇辰,吴晞,袁小龙,等.耐波性预报的数值方法[J].舰船科学技术,2013,35(10):16-20.
LI Yuchen,WU Xi,YUAN Xiaolong,et al.Numerical study on the seakeeping prediction[J]. Ship Science and Technology,2013,35(10):16-20.
[7] 李军.船模横摇阻尼计算方法与减摇优化研究[J].中国航海,2013,36(4):109-113.
LI Jun.Calculation of ship roll damping and optimization of anti-roll design [J].Navigation of China,2013,36(4):109-113.