基于改进自适应无迹卡尔曼滤波的锂电池SOC估计*
2018-03-27张周灿谢长君曹夏令费亚龙李小龙
张周灿 谢长君 曹夏令 费亚龙 李小龙
(武汉理工大学,武汉 430070)
1 前言
电池荷电状态(State Of Charge,SOC)估计是电池管理系统的核心问题之一,而电池荷电状态受充放电电流、环境温度、循环次数等各种因素的影响,导致锂电池SOC值很难被直接测量。常用的SOC估计方法有以下几种:安时积分法[1]算法简单、易行、精度较高,但存在累计误差;开路电压法由于需要长时间静置,不适宜在线估计;神经网络算法[2]虽然精度高,但结构复杂,需要训练大量的数据。扩展卡尔曼滤波算法[3](Extended Kalman Filter,EKF)是在电池荷电状态估计中广泛使用的算法之一,但其依赖精确的数学模型。在非线性处理上,其将非线性部分进行一阶泰勒展开,忽略了高阶项。因此在非线性很强情况下,容易使估算值严重偏离真实值。
无迹卡尔曼滤波(UKF)算法[4]、自适应卡尔曼滤波(AKF)算法[5,6]是当前的研究热点。但UKF算法应用前提是要精确获得系统过程噪声和观测噪声的统计特性,较为不便。AKF算法在线估计过程噪声和测量噪声的协方差矩阵,可提高系统状态的估计效果,但非线性较强时,滤波效果并不好。在两者基础上的自适应无迹卡尔曼滤波(AUKF)算法[7,8]结合概率统计知识,采用概率分布的思路处理非线性问题,是极具发展前景的非线性估计算法。本文将采用基于UT变换(Unscented Transformation,也称无迹变换)的自适应无迹卡尔曼滤波算法,基于锂电池2阶RC模型,对锂电池SOC进行估计。该算法是在传统UKF算法的基础上引入衰减因子与自适应调节因子,能够有效减少系统噪声的影响,提高算法滤波的稳定性。
2 锂电池状态模型的建立
文中选用磷酸铁锂电池进行试验。考虑到模型的准确度和计算复杂度,选择2阶RC电路模型作为锂电池SOC估计模型,电路模型如图1所示。2阶RC模型对电池的3种特性(欧姆极化、电化学极化和浓差极化)分别进行建模。模型中Uoc表示开路电压;Vo代表电池的端电压;Re是欧姆内阻;Rs与Cs环路描述电池电化学极化效应;Rs与Cp环路模拟电池内部的浓差极化效应;u为端电流。
根据图1所示电路图,以SOC、两电容上的电压Us、Up为状态变量,端电流u为输入变量,端电压Vo为输出变量。

图1 2阶RC等效电路模型
由基尔霍夫定律建立图1所示等效电路的状态空间模型并离散化,得到其离散状态空间模型:


u(k)为输入变量;T是系统采样周期。
3 开路电压与SOC关系的整定试验
为得到开路电压与SOC的关系,本试验采用中航锂电公司生产的额定容量为40A·h的磷酸铁锂电池,开路输出电压(标称电压)为3.2V。建立的试验测试装置主要由电源、采集板、显示器、锂电池、放电装置、霍尔电流传感器等组成。通过调节放电装置,使锂电池进行恒流放电试验。具体测试流程如下:先采用专用充电机将电池充满电,直至电池SOC为1(充满电状态),然后静置12h;在常温下,将电池的SOC值从1到0进行10等分的恒流脉冲放电试验,每次脉冲放电试验结束后将电池静置4h,并记录此时电池的开路电压值。脉冲放电电流为0.2C。
由上述试验数据可得开路电压Uoc与电池SOC的关系曲线如图2所示。由5阶曲线拟合可得它们之间的函数关系式如公式(2)所示:


图2 开路电压与SOC的关系
4 锂电池状态模型的参数辨识
本文采用递推最小二乘法来离线辨识锂电池模型参数,根据图1电池模型等效电路原理图,得到如下参数辨识原理式:

经过双线性变换处理得到如下方程式:

其中,T为采样周期,取状态变量:

得到最小二乘形式:

其中,e(k)是误差函数。最小二乘法递推计算公式如下:

初始值:θ(0)设置为0,协方差矩阵初始值P(0)=aI,a为很大的正数,I为5阶单位矩阵。
利用递推最小二乘法公式(7)估计出模型参数,然后采用公式(5)反推出模型的电容、电阻值:

5 基于AUKF的锂电池SOC估计
UKF算法本质上是通过线性插值方法,对非线性模型进行的高精度变换。当非线性程度较小时,可以削弱非线性误差的影响。其缺点是在非线性程度较强时,协方差更新时容易出现负定矩阵的情况。另外,UKF算法受初始值影响较大,系统噪声较为明显。在数据采集过程中噪声统计特性未知,会导致卡尔曼滤波法的估计精度降低,甚至会引起发散,导致滤波结果不稳定产生较大的误差。为了提高系统精度需要在传统UKF算法基础上加以改进。
5.1 UKF算法简介
按照卡尔曼的递推公式,根据新数据和前一状态的估计值,再借助系统本身的状态转移方程,得出当前时刻的状态估计值。锂电池的非线性系统离散状态空间方程为:

式中,f为非线性状态方程;g为非线性观测方程;Wk、Vk为随机变量x与观测变量y的高斯白噪声,其方差矩阵分别为 Qw和 Rv:

初始化X0=(SOC0,0,0 )设置为状态变量初始值,其方差估计P0:

根据状态变量的统计量xk-1及其协方差,状态变量的维数L=3;基于UT变换的自适应卡尔曼滤波估计锂电池SOC的算法步骤如下:
a.计算采样点
采用Sigma点对称采样策略,得到x点的Sigma点集,以及其对应的均值加权值和方差的加权值:

b.时间更新
根据状态方程式(1)计算状态更新:

计算预测状态值:

计算状态预测值的协方差:

根据方程式(1)测量更新:

计算预测测量值:

计算测量估计yk的协方差:

计算Xkk-1与Ykk-1的协方差:

c.测量更新
计算卡尔曼增益矩阵:

更新状态:

更新误差协方差:

5.2 AUKF算法
为了在非线性程度较强时能够有效提高电池SOC估算精度,降低初始值和系统噪声对滤波结果的影响,提高算法滤波的稳定性。在传统UKF算法基础上引入衰减因子与自适应调节因子,组成带有衰减记忆效应的无迹卡尔曼滤波器。由于系统噪声也会影响到滤波结果,因此引入自适应调节因子调节相关的协方差矩阵,在一定程度上可改变其在滤波过程的作用。
5.2.1 衰减因子
在UKF算法的基础之上引入衰减因子,组成带有衰减记忆效应的无迹卡尔曼滤波器。这种算法与传统UKF算法的主要不同之处是在公式(14)的基础上增加了衰减因子S,使得公式(14)转换成公式(22):

仿真结果表明,引入衰减因子后的算法带有衰减记忆效应,并且衰减因子S的选取对滤波结果有较大影响,滤波精度随着S的增大而减少,有时甚至会引起滤波发散。因此为有效提升滤波效果、提高系统稳定性,还需引入自适应调节因子。
5.2.2 自适应调节因子
传统UKF算法受初始值影响较大,此外,系统噪声同样也会影响滤波结果。因此,为了减少这些影响,自适应调节相关的协方差矩阵,可以在一定程度上改变其在滤波过程的作用。
对协方差矩阵公式(17)、式(18)、式(21)进行修正得到:
当UKF算法初始值存在误差或系统存在异常扰动时,自适应因子αk<1,此时模型预测信息对最终滤波解的贡献小;当预测信息异常时,会很大,此时自适应因子接近于0,预测完全不起作用。下面通过具体工况试验验证引入衰减因子与自适应调节因子之后AUKF算法的优越性。
6 试验验证与结果分析
通过不同初始值情况下恒流放电工况试验,得到AUKF算法对SOC估计及误差曲线。在恒流脉冲充放电工况、美国城市循环工况(Urban Dynamometer Driv-ing Schedule,UDDS)两种工况试验下验证AUKF算法在传统UKF算法基础上引入衰减因子和自适应调节因子之后对滤波结果、SOC状态估计与估计误差的影响。
6.1 恒流放电工况试验
为了验证该算法不依赖初始值,对额定容量为单节40Ah的锂电池进行恒流充放电试验,试验环境温度为常温,放电累计时间为200s。放电试验前,对电池进行12h的充分静置,根据开路电压与电池SOC的对应关系获取初始SOC值。在试验过程中,实时采集电压电流值,采样频率为10次/s,对单体电池进行0.2C的恒流放电试验。通过测量得知,电池开路电压初始值为3.137V,电池SOC值为0.912,作为安时积分法的初始SOC值。
为验证SOC估算算法不依赖初始值的特性,假设SOC初始值偏离实际值,分别设定为0.8、0.6、0.96。采用AUKF算法来估计SOC值,并与安时积分法获得的参考值进行比较。试验数据曲线如图3、图4所示。从图3可知,不同的SOC初始值,基于AUKF算法均能快速收敛到参考值附近。从图4所示不同初始值下的估计误差曲线可知,在误差曲线后期,它们的估计误差均能保持在(-0.80%,0.80%)之间。由此可得,AUKF算法对初始值不敏感,且收敛速度较快。
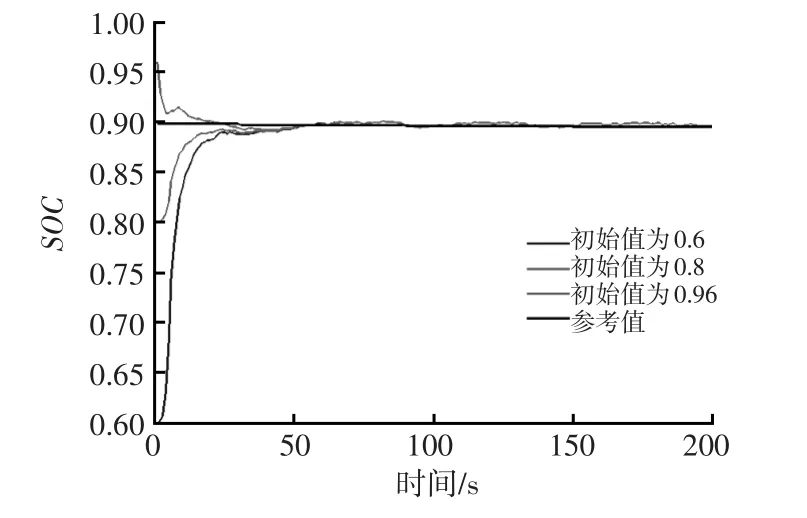
图3 不同SOC初始值下AUKF算法对锂电池SOC估计曲线
6.2 恒流脉冲充放电工况试验
为验证动态工况下算法的跟踪能力,选取自定义恒流脉冲充放电工况试验,电流工况数据如图5所示,负数代表放电,正数代表充电。分别采用安时积分、UKF算法与AUKF算法估算的SOC值曲线如图6所示,UKF和AUKF的估算误差曲线如图7所示。从图6中可知,这两种算法均能很好地跟踪SOC参考值的变化。从图7中可知,在初始阶段,基于AUKF算法的估计曲线更快收敛到参考值附近,且在后期,AUKF的误差比UKF的误差要小。两者均能保持在(-0.80%,0.80%),而传统UKF算法的误差最大会达到2%。
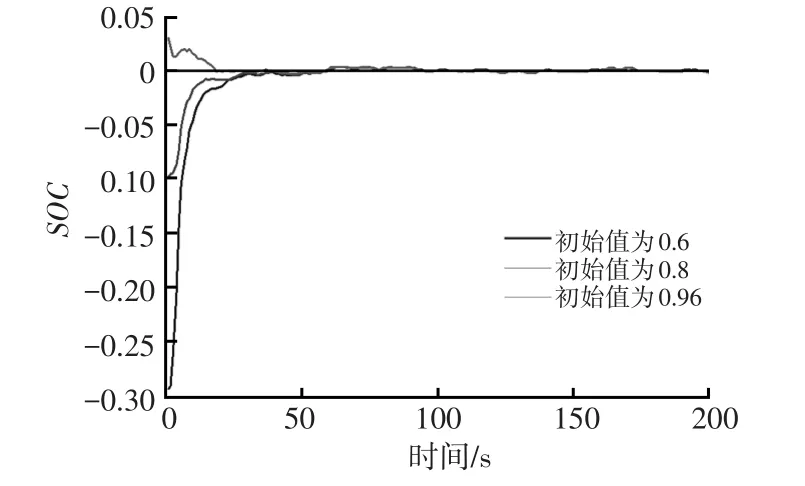
图4 不同SOC初始值下AUKF算法对锂电池SOC估计误差曲线
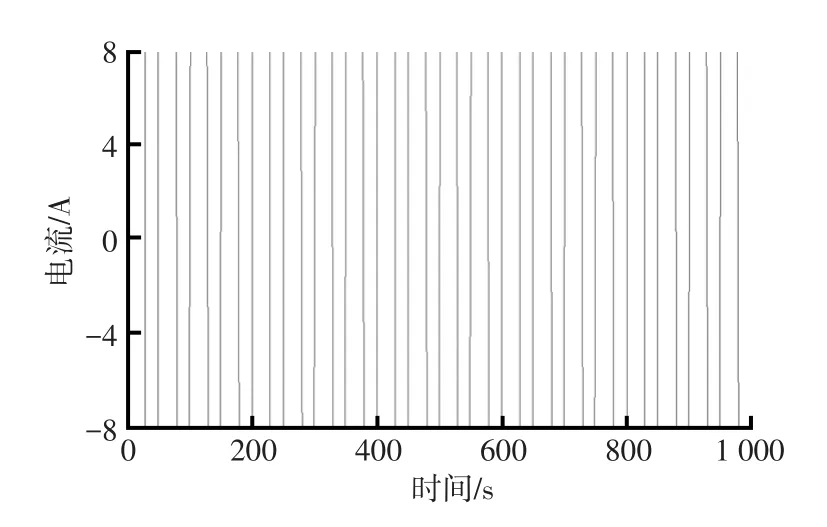
图5 恒流脉冲充放电电流工况数据

图6 恒流脉冲充放电的锂电池SOC估计
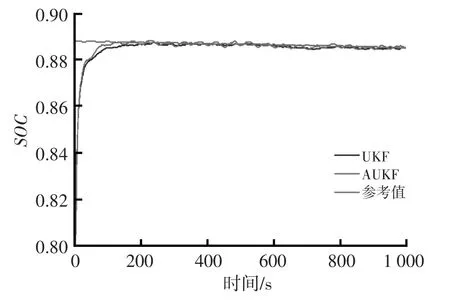
图7 恒流脉冲充放电的锂电池SOC估计误差
6.3 美国城市循环(UDDS)工况试验
为更好说明动态工况下算法的跟踪能力,选取美国城市循环工况(UDDS)验证试验。实时电压电流值的采样频率为10次/s。电流工况数据如图8所示,负数代表放电,正数代表充电。同样分别采用安时积分、UKF算法与AUKF算法估算的SOC值曲线如图9所示,UKF和AUKF的估算误差曲线如图10所示。
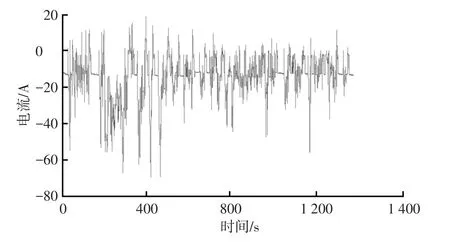
图8 UDDS工况下电流变化曲线

图9 UDDS工况下锂电池SOC值估计

图10 UDDS工况下锂电池SOC估计误差
仿真曲线表明,在UDDS与恒流脉冲充放电两种动态工况下AUKF曲线更加接近参考曲线,AUKF算法估算锂电池SOC的波动性较小。此工况验证试验结果与自定义恒流脉冲充放电工况试验结果相符。引入衰减因子与自适应调节因子之后的AUKF算法估算锂电池SOC的波动性比传统UKF算法小,系统噪声更低,自适应能力更强。
7 结束语
锂电池SOC值的在线估计是当前研究的热点和难点问题。文中提出了在UKF算法基础上引入衰减因子和自适应调节因子的AUKF算法,在上述多种动态实时工况中进行了对锂电池SOC估计的试验。试验结果证明,相比传统UKF算法,本文提出的基于AUKF算法对锂电池SOC估计具有更高精度及更好的跟踪性,提高了算法对初始值和系统噪声的鲁棒性,验证了AUKF算法在电池SOC估计方面实用性强、精度高和收敛快等优点。
[1]李申飞,易菊兰,琚小明.电池电量精确测量方法的研究与实现[J].计算机工程与应用,2009,45(17):244-248.
[2]刘征宇,杨俊斌,张庆,等.基于QPSO-BP神经网络的锂电池SOC预测[J].电子测量与仪器学报,2013,27(3):224-228.
[3]郭孔辉,付皓,丁海涛.基于扩展卡尔曼滤波的汽车质心侧偏角估计[J].汽车技术,2009(4):1-3.
[4]沈艳霞,周园.基于无损卡尔曼滤波的锂离子电池组SOC估计[J].电源技术,2014,38(5):828-831.
[5]张頔,马彦,柏庆文.基于自适应卡尔曼滤波的锂离子电池SOC估计[J].汽车技术,2011(8):42-45.
[6]刘和平,许巧巧,胡银全,等.自适应卡尔曼滤波法磷酸铁锂动力电池剩余容量估计[J].重庆大学学报:自然科学版,2014,37(1):68-74.
[7]魏克新,陈峭岩.基于自适应无迹卡尔曼滤波算法的锂离子动力电池状态估计[J].中国电机工程学报,2014,34(3):445-452.
[8]胡志坤,刘斌,林勇,等.电池SOC的自适应平方根无迹卡尔曼滤波估计算法[J].电机与控制学报,2014,18(4):111-116.
