基于自适应模糊PID控制的猪舍温湿度控制系统研究
2018-03-22林升峰王鹏宇王德福刘洪贵
冯 江,林升峰,王鹏宇,王德福,刘洪贵
(东北农业大学电气与信息学院,哈尔滨 150030)
猪场管理过程中,猪舍温度和湿度是影响生猪生长过程和猪场生产效率重要环境因素[1]。猪脂肪厚、皮肤薄,对外界环境适应能力较差,高温环境易出现采食量下降、抗病性降低等症状,低温环境则消耗脂肪维持体温平衡[2],不利于长膘;猪舍空气相对湿度过高易滋生细菌、诱发疾病,侵蚀破坏猪舍电子器件,空气相对湿度过低,猪皮肤干裂、破坏猪黏膜[3-4]。我国北方冬季气候寒冷干燥,环境条件恶劣。为提高生产效益,保障猪只生长环境,解决猪舍内维持适宜环境温湿度和通风换气量矛盾关系尤为重要[5]。
为提高生猪养殖生产效率,养殖过程中自动化、智能化、精准化控制成为行业发展关键技术。国内外学者对猪舍环境监测及控制开展相关研究,Daskalov等针对猪舍通风量、舍内空气温度和风向组合控制算法研究[6]。Ma等采用GPRS通讯技术,建立一套基于遗传算法调控猪生长环境智能系统[7]。Seo等建模分析规模化猪场中猪舍温度及气候等环节因素,模型分析与实际检测值误差最大为4.4%[8]。国内多为实现自动化控制和减少能耗研究,其中,钱东平等通过研究模糊控制算法建立畜舍温度调控及监测数学模型[9];赵静伟利用风机和水泵,采用模糊控制算法调控猪舍环境[10];于明珠等采用PLC实现仔猪猪舍温度自动控制[11];宣传忠等采用ANFIS算法研究猪舍温度误差训练,实现猪舍问题精确监控,并建立猪舍温度控制模型[12];谢秋菊针基于模糊理论研究猪舍环境适应性评价及调控模型[1]。因研究地域气候环境不同或控制方式不同,精度存在差异。本文针对我国北方寒地猪舍冬季室内外温差情况,基于自适应模糊PID控制算法研究猪舍温湿度调控系统,实现符合我国北方猪舍冬季气候环境精准化控制。
本文通过猪舍温湿度调控建模,研究模糊控制算法、传统PID控制算法和自适应模糊PID控制算法在猪舍温湿度控制系统中调控性能[1]。因妊娠母猪对猪舍环境较敏感,对猪舍环境适应性差,本文以妊娠母猪温度调控系统建模、仿真说明三种控制算法对猪舍环境系统调控性能。根据国家颁发《规模猪场环境参数及环境管理》标准中猪舍环境中温度、湿度参考参数(见表1),设置模糊控制和基于自适应模糊PID隶属度函数,以《规模猪场环境参数及环境管理》为评价标准,通过监测自适应模糊PID控制算法调控下猪场温湿度变化,反应其实际应用调控性能[9]。
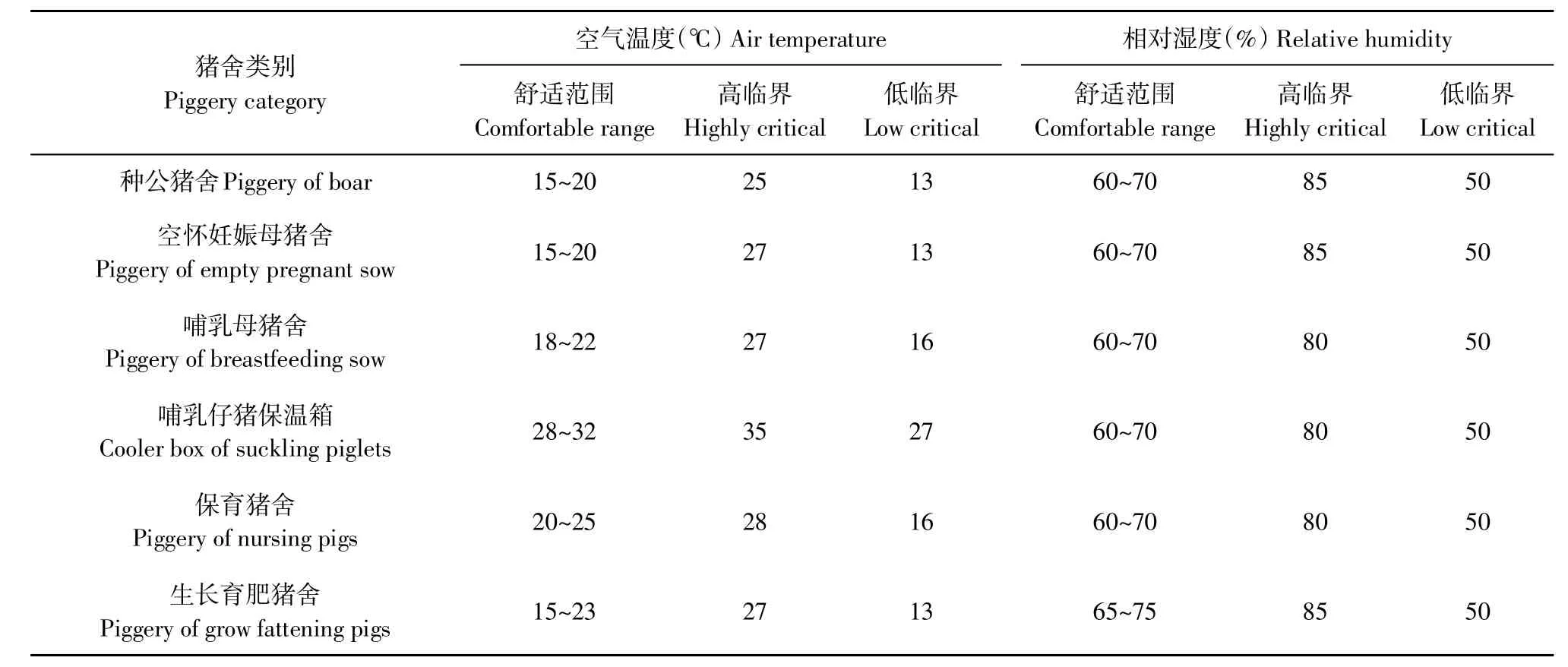
表1 不同猪舍类别中空气温湿度参数表Table1 Air temperatureand humidity in different typesof barn
1 猪舍环境温控建模
试验数据均来自黑龙江省某中等规模猪场,猪舍长30 m,宽15 m,高2.8 m,分3排南北朝向12个畜栏;长6.1 m,宽4.2 m,12~16头妊娠母猪,猪舍结构如图1所示。我国北方,冬季猪舍对外通风系统采用单项排风,猪舍温湿度控调系统主要依靠风控温湿度机箱调节。
1.1 猪舍环境热交换建模
根据猪舍环境特点,在时间较短、猪舍室内外温差变化不大,保障模型精确度情况下,采用理想化模拟简化模型对象建立数学模型[13-14],获得猪舍温控传递函数,建模过程如下。
本模型根据基本能量守恒定律得出,在短时间内能量传递,忽略猪自身产热变化及住房结构散热,仅考虑墙体之间热量交换与调控系统热量交换,根据能量流入流出差[15-16]:

C为猪舍内气体比热容(KJ·K-1);T0为猪舍外部气体环境温度(K);Ti为猪舍内被控温度(K);H为猪舍墙体热传导系数(KJ·(sm2· K)-1);Qi为单位时间内产生或消耗热量(KJ·s-1);A为猪舍传热面试(m2)。

则猪舍内被控温度变化量ΔT与猪舍温控机箱控制量ΔQ之间传递函数为:

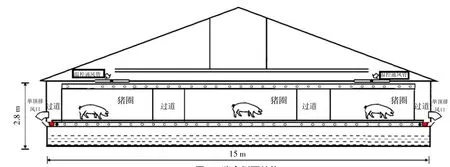
图1 猪舍侧面结构Fig.1 Schematic structureof Piggery
同样,对于湿度一阶函数传递模型也同样适用。
参照《规模猪场环境参数及环境管理》标准,根据我国北方猪场养殖经验妊娠母猪最适宜温度为18~22℃。猪舍内空气含有大量有害气体,不易直接循环利用,温控装置采集空气为温控室气体,冬季温控室预先加热至5℃以上,夏季温控室内最高温度为32℃左右。则一般温度调节最大值为5~20℃,即温控差为15℃。温控通风机工作风量为14 400 m3·h-1,猪舍空气体积约1 260 m3,猪舍通风次数为N=11.43次·h-1。根据猪舍温控系统结构,温控通风为侧面散流式送风,猪舍温控延时为τ1=9/N≈0.789 min≈47 s,惯性时间常数为T1=90/N≈472 s,则系统增益系数为k1=1.21714。

1.2 猪舍温湿度风控系统建模
猪舍温湿度风控系统由风控机箱控制排除风量及温湿度变化,通过温湿度通风管道输送由温湿度调控系统排出调控环境风。猪舍温湿度风控机箱温湿度数据源于猪舍内数据监测模块,由中央处理器调控处理,中央处理器采用STM32F103芯片,执行部件为温湿度风控机箱变频模块。结构如图2所示。
在温控机箱内工作过程中,执行调节过程与暖风机和冷风机表面制冷、制热面和风速相关。根据孟华等对表冷器模型建模仿真和试验分析,在温控模型建模仿真中,温控风机机箱内控制模型可采用一阶加纯滞后惯性环节表示[17]。K2=1为控制对象放大系数;T2=10为惯性环节时间常数,τ2=10为控制器纯滞后时间常数。传递函数可表示为:

即由公式(5)和(6)可得猪舍温控系统传递函数为:

通过对猪舍环境温度热交换建模和温湿度风控系统建模,得到整个猪舍温湿度控制系统模型。在猪舍环境当中,湿度调控同样满足公式(7)二阶传递函数控制模型。

图2 猪舍温湿度控制系统结构框图Fig.2 Structureblock diagram of hog housetemperatureand humidity control system
2 猪舍温度控制算法设计原理及仿真
2.1 基于模糊控制算法设计及仿真
模糊控制理论普遍应用于复杂控制领域,可解决无法准确建立数学模型控制类问题[18]。模糊控制系统结构包括模糊化、知识库、模糊推理、解模糊化四部分[19]。结构如图3所示。
①模糊化:将所研究系统输入量乘以适当增益系数转化到论域上[19],将变量变化过程用语言变量描述,以适当语言值表示输入值隶属度。本文为简化模糊化过程将轮域设置为[-15,15],将温度误差、温度误差变化率和控制系统输出量划分为7个等级{NB,NM,NS,Z,PS,PM,PB}。输入输出隶属度关系如图4所示。
②知识库:知识库组成包括规则库和数据库,规则库主要存储控制语言描述控制规则,而数据库主要存储模糊处理语言数据相关定义[20]。根据相关经验及实验分析获得猪舍温度误差和误差变化率结合的49条规则,如图5所示。
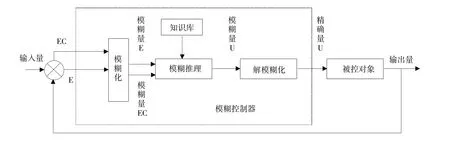
图3 模糊控制系统结构构图Fig.3 Structurediagram of fuzzy control system
③模糊推理:模糊推理是基于模糊关系与模糊集合之间合成法则和模糊蕴含关系逻辑推理策略。模糊推理既是模糊控制理论依据,是模糊决策前提[21-22]。常用模糊推理在模糊控制中有单个输入量推理得到单个输出量,多个输入量推理得到单一输出量和多个输出量推理得到多个输出量。在模糊推理中最常用合成算法有Mamdani推理法、Takagi-Sugeno模糊推理法和Zadeh推理法等[17]。本文采用Mamdani推理法,如图6所示。Mamdani推理法以“先取极大—后取极小”合成运算法[22]。
④解模糊化:由模糊推理得到输出模糊子集,经过解模糊化,最终得到需要输出控制精确量。解模糊化方法选取直接影响模糊控制输出值,当前最为常用解模糊化方法主要有面积重心法、加权平均法和最大隶属度法。面积重心法根据横坐标与隶属度函数曲线围成图形面积重心点,作为解模糊化控制最终输出值[23],其计算公式如下:

对于具有n个输出量化级离散情况可由公式(8)得其输出值:

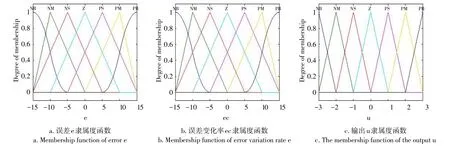
图4 猪舍温控系统输入、输出隶属度函数Fig.4 Input of temperaturecontrol system of piggery and output membership function diagram
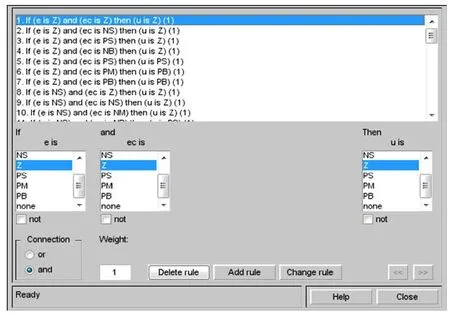
图5 MATLAB设置49条模糊推理规则Fig.5 49 piecesof fuzzy inferencerulesset by MATLAB
在输入量发生变动时,由面试重心法获得模糊控制输出值为平滑曲线,即使误差变动较小,也会产生输出信号相应微小波动[20]。仿真模糊控制中解模糊化方法采用MATLAB工具中重心法。
通过simulink仿真得到模糊控制对猪舍温湿度系统仿真,仿真结果如图7所示。

图6 MATLAB仿真中Mamdani模糊推理法Fig.6 Mamdanifuzzy reasoning method in MATLABsimulation
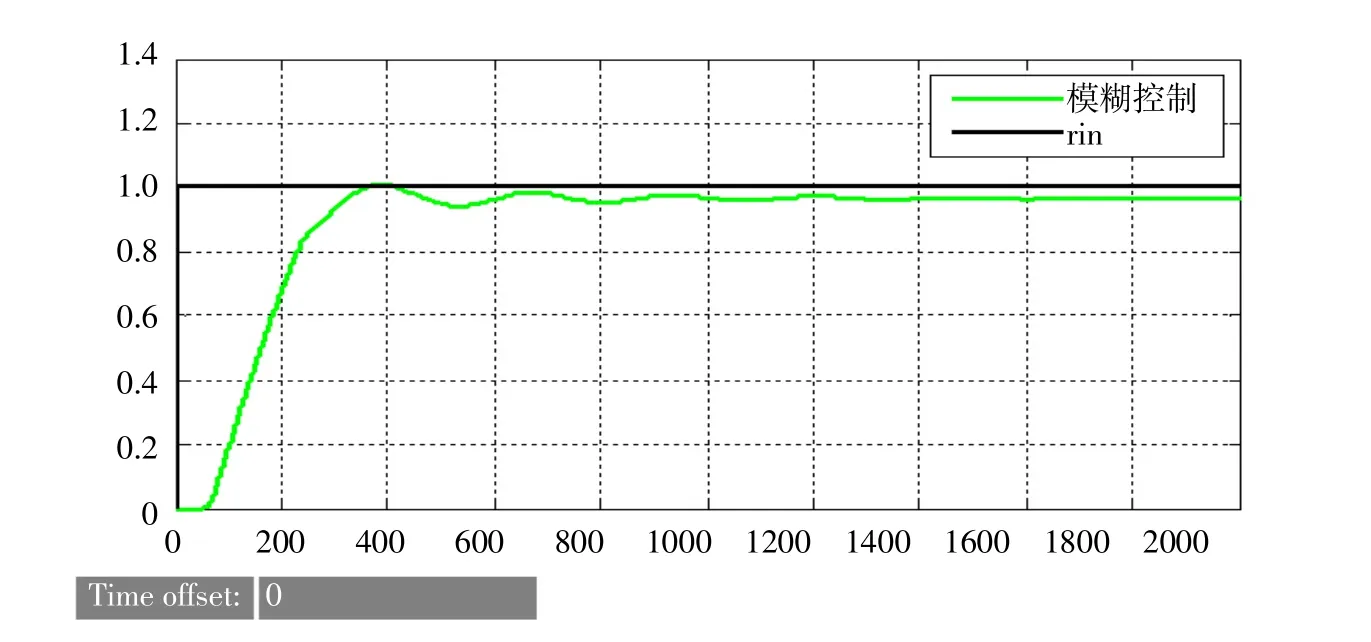
图7 猪舍温控系统模糊控制仿真Fig.7 Simulation diagram of fuzzy control for temperaturecontrol system of piggery
运用模糊控制在猪舍温控系统中其静态误差超过3%,不易达到稳定状态。运用模糊控制处理易导致系统控制精度不足,伴随系统控制动态品质变差,因此猪舍温控系统中不易采用单纯模糊控制[24]。
2.2 基于传统PID控制算法设计及仿真
传统PID作为经典控制算法,通过监测实时误差e和误差变化率ec,运用kp、ki、kd三个参数调节输出量[25]。传统PID控制算法应对输入偏差在合理适应性区间,响应特性较好[26]。由传统PID控制系统原理如图8所示。
传统PID控制算法是根据给系统设定值rin(t)和控制系统实际输出值yout(t)构成偏差计算一种线性控制算法。其偏差计算公式如下:
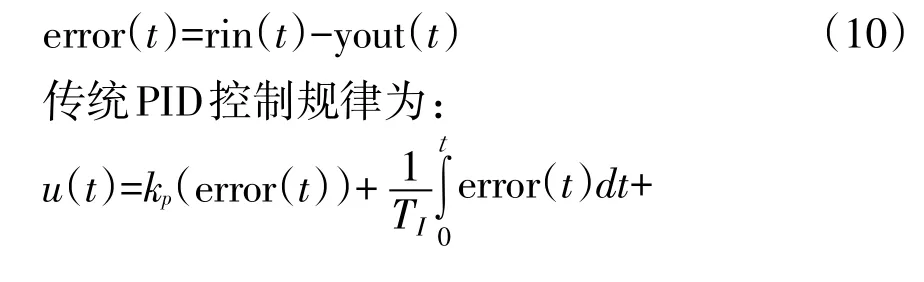

传统PID参数整定问题常用方法为Z-N整定法、临界比例度法、衰减曲线法和试凑法[27]。本文运用临界比例度法接合不同控制系统PID参数整定试凑经验法得到kp=3.9、ki=0.01、kd=3.0,仿真如图9所示。

图8 传统PID控制系统原理Fig.8 Principleblock diagram of traditional PID control system
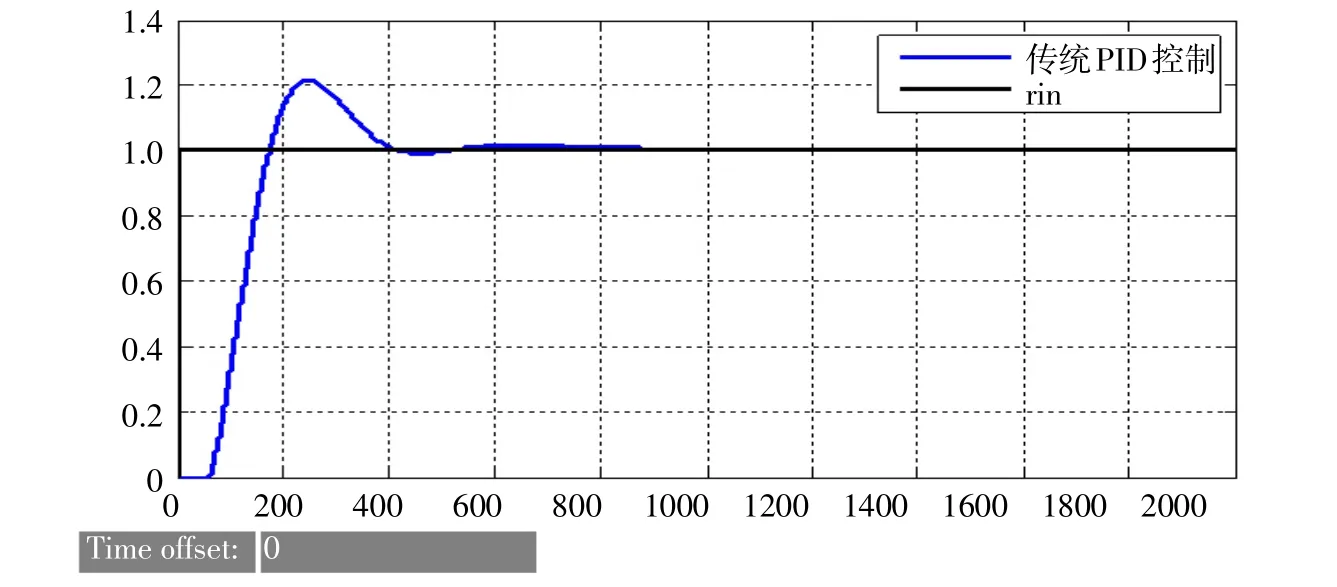
图9 猪舍温控系统仿真结果Fig.9 PIDsimulation resultsof piggery temperaturecontrol system
由图9可知,基于传统PID控制算法对猪舍温控系统调控力度强,第761 s后,阶跃函数超调量小于1%,第939 s后,阶跃函数超调量在0.05%以下。但系统调控超调量过大,系统调控超调量超20%;单纯传统PID在猪舍温控系统中可用,存在弊端。
2.3 基于自适应模糊PID控制算法设计及仿真
猪舍温度、湿度数据具有多因素相互耦合、时变性、非线性等特点,系统所控制干扰因素时刻发生变化。由图7可知,单一模糊控制算法静态误差过大,系统调控周期长,不易达稳定状态;由图9可见,传统PID控制算法控制性能较好,但超调量过大,传统PID控制算法难以适应干扰因素,工业控制对复杂系统用模糊控制理论解决准确量难以表达控制问题,结合控制规则和PID控制,系统可以根据具体情况自行调节实时响应,运用模糊推理可实现对PID参数最佳调整[28],结构如图10所示。
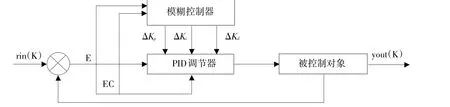
图10 自适应模糊PID控制算法结构Fig.10 Structureof adaptivefuzzy controller
自适应模糊PID控制算法在原有PID参数设定控制基础上,由系统反馈误差和误差变化率经模糊化后,通过模糊推理、去模糊化后得输出Δkp、Δki、Δkd,不断调整PID参数,实现精确控制[29],根据自适应模糊PID控制算法原理可得到PID参数修正公式(15)。

自适应模糊PID控制算法控制原理可得其控制流程图,如图11所示。

图11 自适应模糊PID控制流程Fig.11 Flow of adaptivefuzzy PIDcontrol
将系统输入量以适当转化比例转化到论域上,利用模糊子集描述测量变量过程[30]。根据猪舍实际情况,在猪舍温度控制系统中设置温度误差轮域为[-15,15],为简化模糊化过程,将温度误差和温度误差变化率分为{负大、负中、负小、零、正小、正中、正大}7个隶属等级,即用{NB,NM,NS,Z,PS,PM,PB}表示,其隶属度函数设置如图12所示。其输出 Δkp、Δki、Δkd隶属度也分为7 个等级,如图13所示。
根据猪舍环境温度变化特性,由输入温度差值e和温度差值变化率ec制定相关模糊控制规则49条,设计自适应模糊PID控制算法仿真模糊推理,采用Mamdani推理法,解模糊化方法采用重心法。在MATLAB仿真设置如图14所示,自适应模糊PID控制规则如图15所示。
采用现代工业级基于自适应模糊PID控制算法猪舍温控仿真,仿真结果如图16所示。
由自适应模糊PID控制算法simulink仿真图可知,其最大超调量为2.57%,从初始状态自适应模糊PID控制算法经过323 s调节,系统输出超调量差值小于1%,在339 s后输出超调量小于0.5%。自适应模糊PID控制在猪舍温控系统阶跃响应中可保持较快响应速度和较小超调量。
3 仿真比较与试验分析
3.1 仿真比较分析
通过猪舍温湿度调控系统建模,对比分析三种智能控制算法阶跃响应曲线和加入干扰后阶跃响应变化曲线。由仿真试验分析,三种智能PID控制算法在猪舍环境调节下系统稳定性、超调量、响应速度及受干扰后稳定性、超调量、响应速度[27]。

图12 输入量隶属度函数Fig.12 Membership function of input
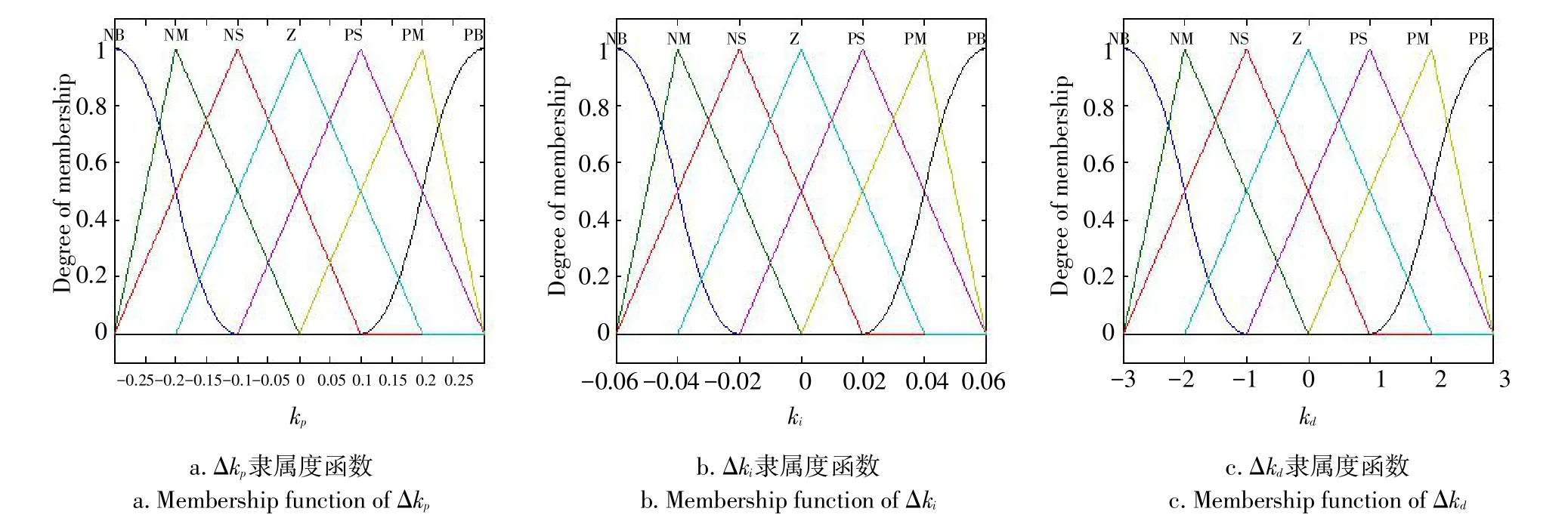
图13 输出Δkp、Δki、Δkd隶属度函数Fig.13 Membership function ofΔkp,Δki,Δkd output
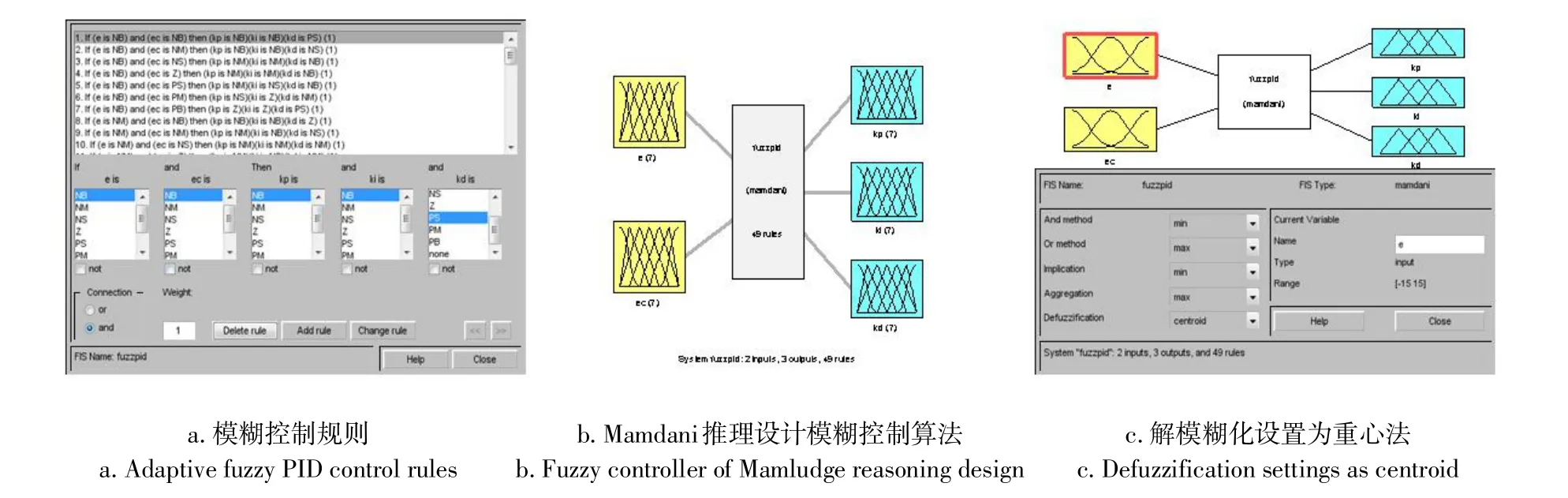
图14 MATLAB仿真设置Fig.14 Set diagramsin MATLABsimulation
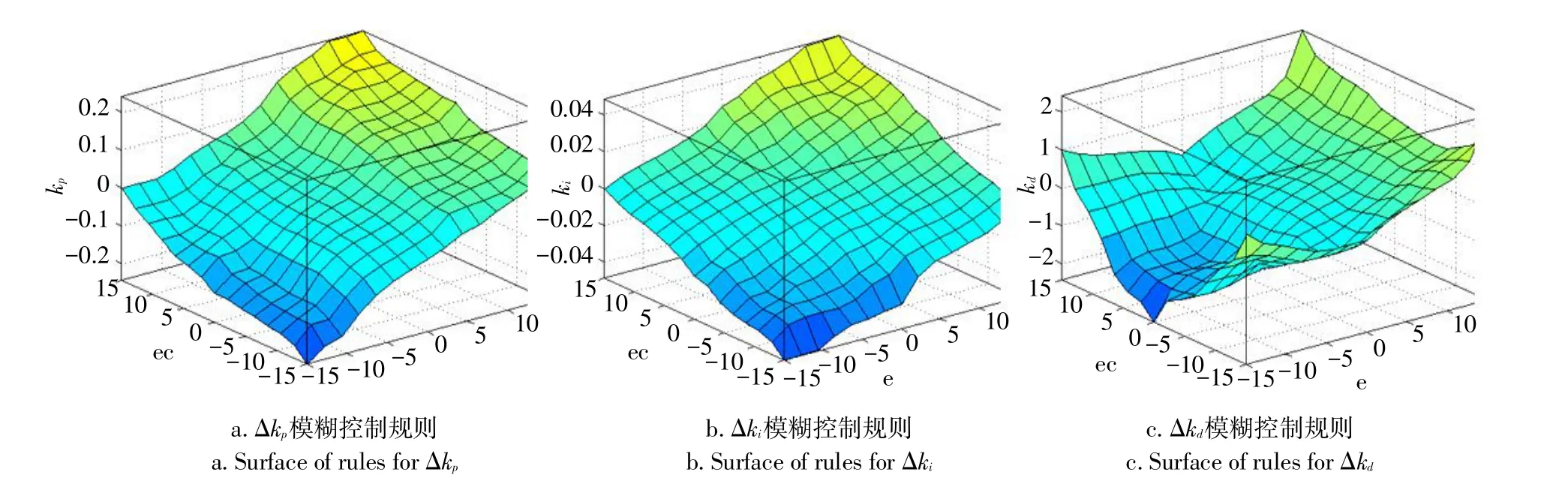
图15 自适应模糊PID控制规则Fig.15 Surfaceof rulesfor adaptivefuzzy PID
猪舍温湿度环境具有滞后性、时变性、强耦合性、非线性等特点,模糊控制算法具有抗干扰能力强,良好容错能力和适应动态条件变化能力;传统PID控制算法是经典控制算法,适应性强。自适应模糊PID控制算法接合模糊控制和传统PID控制算法特点。本文通过猪舍温控建模,模糊、传统PID和自适应模糊PID控制三种智能控制算法应用于猪舍温控模型,三种控制算法对猪舍模型控制仿真,如图17所示。模糊控制响应速度最慢且静态误差大,静态误差大于3%,不适于单独作为猪舍温控系统控制。传统PID控制算法在响应速度和静态误差中控制效果较稳定,但超调量超过20%。所以传统PID虽较稳健控制过程但是对比自适应模糊PID控制算法,自适应模糊PID控制算法猪舍温控系统仿真最大超调量仅为2.57%,系统从初始状态达到输出超调量为1%以下稳态用时323 s,到达输出超调量小于0.5%用时339 s。
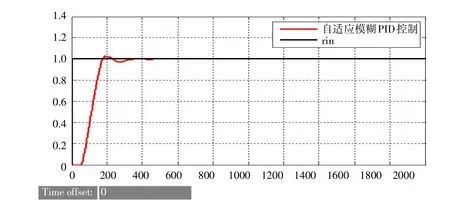
图16 猪舍温控系统基于自适应模糊控制仿真结果Fig.16 Simulation resultsof piggery temperaturecontrol system based on adaptivefuzzy PID control

图17 三种控制算法阶跃函数响应图Fig.17 Step function responsediagram for threecontrollers
由于猪舍环境易受外界及人为因素干扰,在猪舍温控仿真模型中,在第2 200~2 220 s间20 s内持续加入20%干扰信号,加入干扰后三种智能控制算法仿真如图18所示。受干扰信号自适应模糊PID控制算法仿真在第2 277 s达到最大系统输出超调量值3.43%,在第2 300 s时系统输出超调量值小于1%,整个控制过程持续100 s达到稳定状态,2 472 s后系统输出超调量在0.5%以下,整个调节时间为272 s。传统PID最大系统输出超调量为3.82%,在第2 423 s后系统输出超调量值小于1%,整个调控时间为223 s,2 571 s后系统输出超调量小于0.5%,调控时间为371 s。
根据仿真图17~18得出三种智能控制算法阶跃响应数据对比,如表2所示。由此可知,自适应模糊PID控制算法,可有效调节猪舍环境温控问题。避免传统PID控制算法超调量过大问题和模糊控制静态误差难以消除等问题,有效应对猪舍环境干扰性调控。
3.2 数据分析
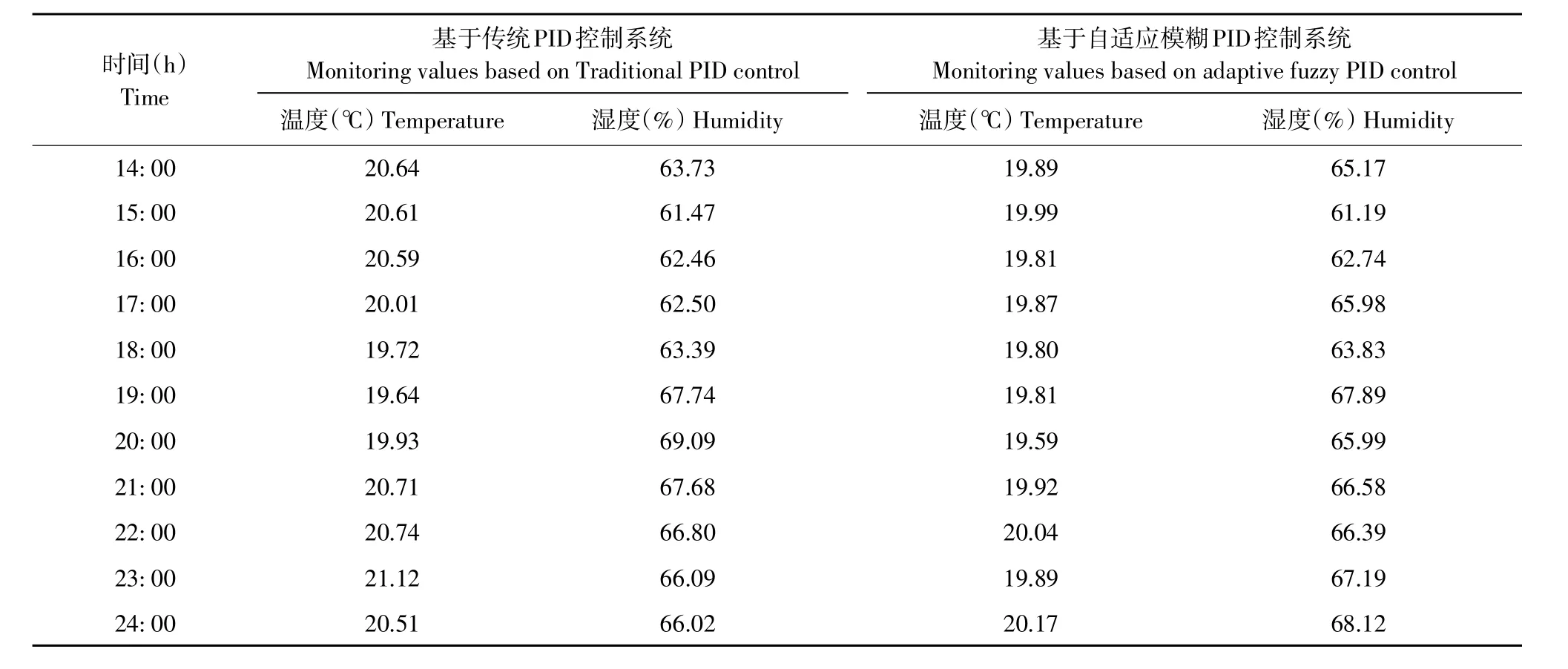
试验于2017年11月中下旬在黑龙江省某大型猪场开展,室外温度-16~-27℃。试验采用传统PID控制算法调控猪舍温湿度和自适应模糊PID控制算法调控对比。通过监测比对两种智能控制算法调控下猪舍温湿度数据,验证基于自适应模糊PID控制对猪舍温湿度环境调控性能。列出部分整点时刻温湿度数据如表3所示,绘制监测温湿度数据图。
根据试验测量温湿度绘制温湿度曲线变化如下图19~22所示。

图18 三种控制算法加入20%干扰信号后阶跃响应Fig.18 Step responseof threecontrollerswith 20%interferencesignal

表2 三种PID控制算法阶跃响应比较Table2 Comparison of step responseof three PID controllers
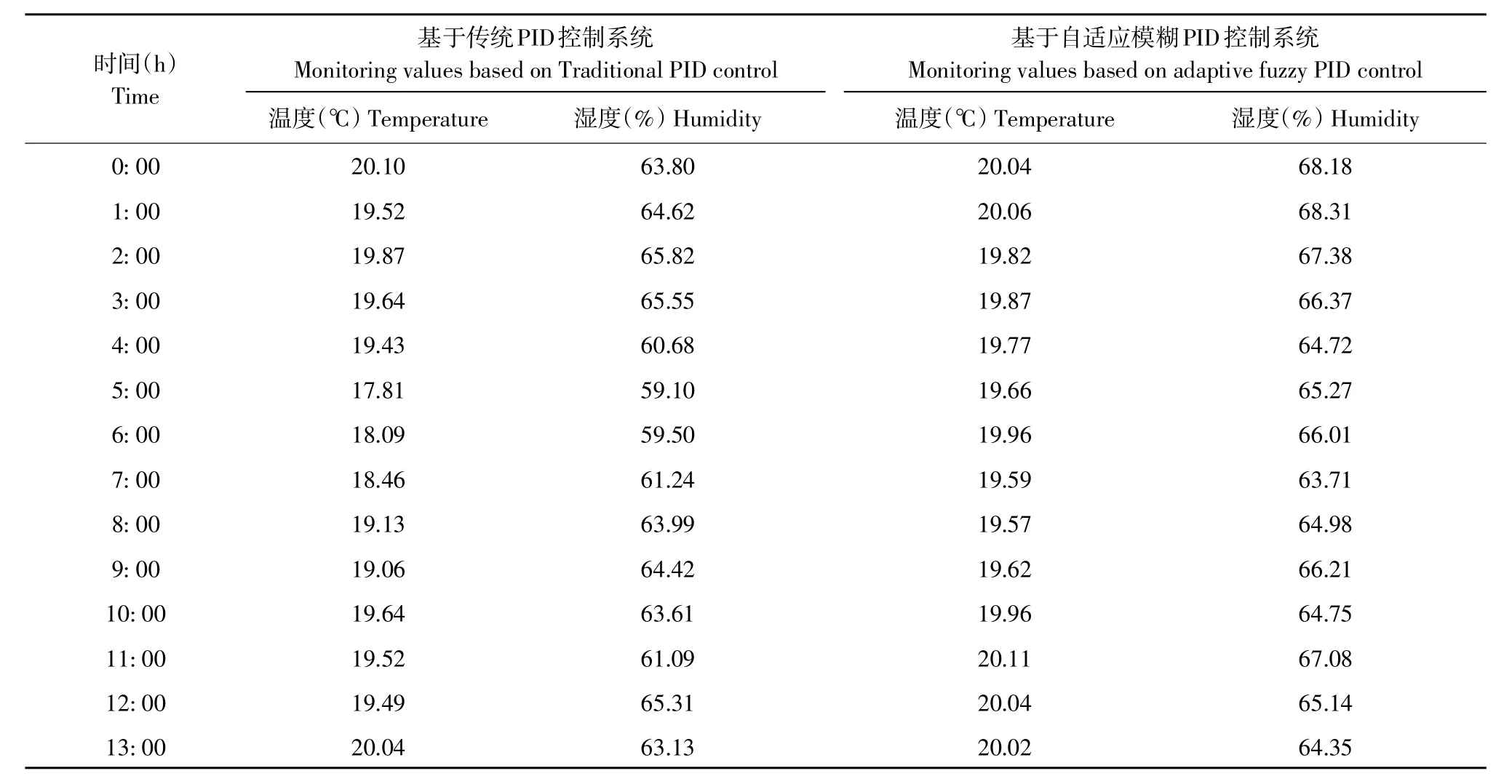
表3 监测数据整点温湿度值Table3 Temperatureand humidity valueof thewholepoint of monitoring data
续表
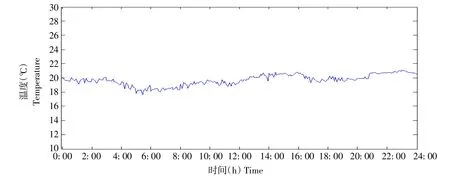
图19 基于传统PID控制下温度变化Fig.19 Temperaturechangeunder adaptive Traditional PID control
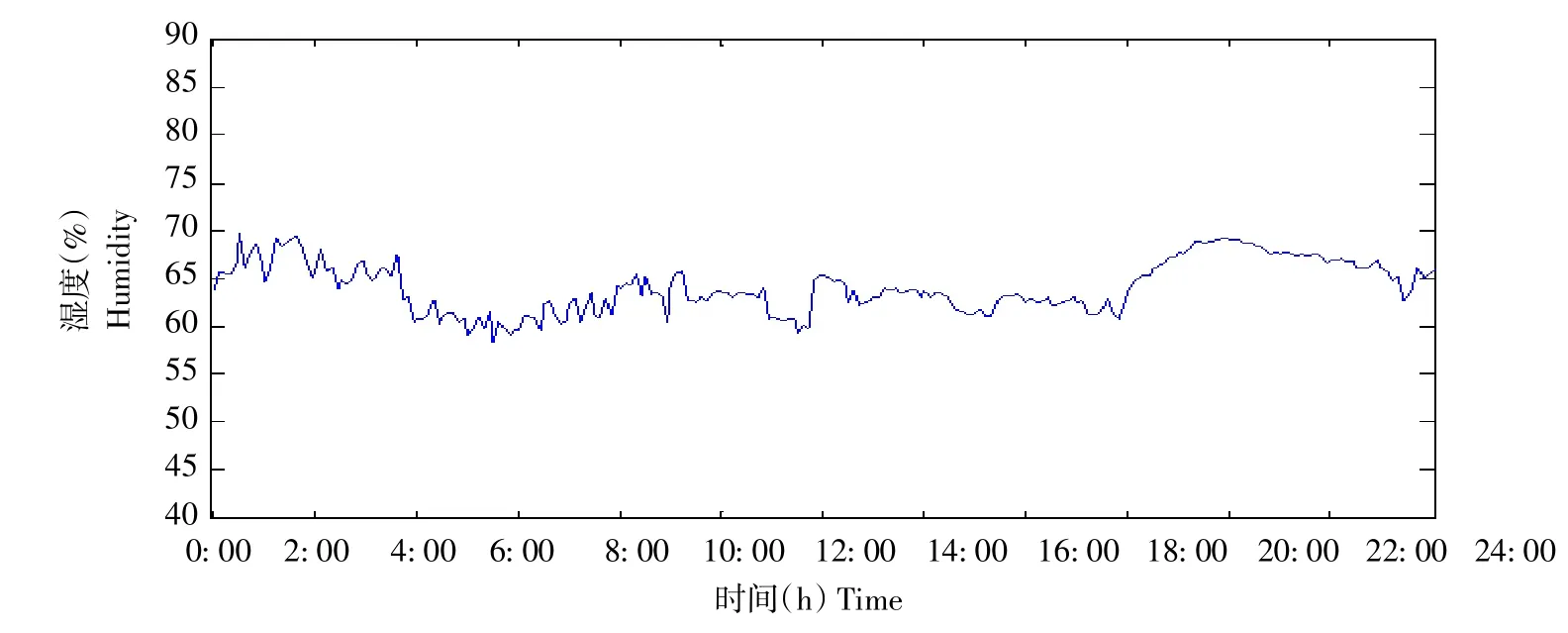
图20 基于传统PID控制下湿度变化Fig.20 Humidity changeunder adaptive Traditional PID control
根据试验中监测猪舍温湿度调控情况由图19可知,在原传统PID控制算法调控下猪舍温度最低17.59℃,最高21.12℃,温差3.53℃,最大温度偏离差值为2.41℃,猪舍温度在20℃浮动;由图20可知,传统PID控制算法调控下,猪舍空气相对湿度最低为58.14%,最高为69.75%,最大湿度差为11..61%,最大湿度偏离差值为6.86%。
由图21~22可知,在自适应模糊PID算法调控下监测猪舍温度最低19.39℃,最高20.36℃,温差0.97℃,最大温度偏差0.61℃。猪舍控制相对湿度最大值69.65%,最低湿度值60.41%,最大湿度差9.24%,最大湿度偏差4.65%。

图21 基于自适应模糊PID控制下温度变化Fig.21 Temperaturechangeunder adaptive Fuzzy PID control

图22 基于自适应模糊PID控制下湿度变化Fig.22 Humidity changeunder adaptive Fuzzy PID control
5 讨论与结论
由图19~20可知,实际猪舍温湿度调控中,传统PID控制算法调控最大温湿度差值分别为3.53℃和11.61%,最大偏离差值2.41℃和6.86%;由实测调控数据分析可得传统PID控制算法调控下,猪舍温湿度基本满足猪生长环境需求,但传统PID控制算法调控精度不够、稳定性差。自适应模糊PID控制算法调控最大温湿度差值分别为0.97℃和9.24%,最大偏离差值为0.61℃和4.65%。在猪舍温湿度调控系统中,基于自适应模糊PID控制算法较传统PID控制算法最大偏差分别减少1.8℃和2.21%。
由实测调控数据分析可知,在自适应模糊PID控制算法调控下,猪舍温湿度变化区间在合理范围,符合国家《规模猪场环境参数及环境管理》标准中最适宜温湿度要求。未出现温湿度幅度过高情况,曲线接近平滑、调控整体处于稳定状态,符合猪舍环境调控标准要求。通过仿真分析和试验结果对比分析,基于自适应模糊PID算法改进后,温湿度控制系统有效提高我国北方寒地猪舍冬季温湿度调控精度,为我国北方寒地猪场冬季养殖管理提供可靠温湿度环境支持。
[1]谢秋菊.基于模糊理论的猪舍环境适应性评价及调控模型研究[D].哈尔滨:东北农业大学,2015.
[2] 翁昌龙,董春霞.浅析热应激对种猪繁殖性能的影响及其应对措施[J].中国猪业,2013(6):38-40.
[3] 谢秋菊,罗文博,等.基于神经网络猪舍氨气浓度预测方法研究[J].东北农业大学学报,2016,47(10):83-92.
[4] 吴兆胜,罗细芽,万伟红,等.猪舍夏季环境温度控制应用现状及发展趋势[J].中国农机化学报,2012(6):191-195
[5] 张俊辉.试验猪舍改造及其环境评价[D].北京:中国农业科学院,2012.
[6] Daskalov P,Arvanitis K,Sigrimis N,et al.Development of an advanced microclimate controller for naturally ventilated pig building[J].Computers and Electronics in Agriculture,2005,49(3):377-391.
[7] Ma C,Zhao D,Ni W,et al.Intelligent controlling system of pig growth environment[C].Wuhan:2010 International Conference on Intelligent Computation Technology and Automation,2010.
[8] Seo IH,Lee IB,Moon OK,et al.Modelling of internal environmental conditions in a full-scale commercial pig house containing animals[J].Biosystems Engineering,2012,111(1):91-106.
[9] 钱东平,王建新,隋美丽,等.畜禽舍环境温度监控系统模糊控制算法的实现[J].农业机械学报,2005,36(12):95-98.
[10] 赵静伟.内蒙古寒冷地区密闭式猪舍舍内环境监测与猪舍优化设计研究[D].呼和浩特:内蒙古农业大学,2012.
[11] 于明珠,武佩,韩丁,等.基于PLC的仔猪舍温度自动控制系统的设计与试验研究[J].农机化研究,2012,34(11):102-105.
[12] 宣传忠,武佩,马彦华,等.基于自适应模糊神经网络的畜禽猪舍环境控制系统的研究[J].内蒙古农业大学学报,2013,44(4):397-403.
[13] Ji Q N,Albert JH.An on-site computer system for comprehensive agricultural air quality research[J].Computers and Electronics in Agriculture,2010,71(1):38-49.
[14] 段英宏.空调房间温度预估模糊PID控制器的研究[J].系统仿真学报,2008,20(3):620-3622.
[15] 余倩倩.温室环境小气候模型的构建及智能控制算法的研究[D].南京:南京农业大学,2010.
[16] 俞守华,区晶莹,张洁芳.猪舍有害气体测定与温度智能控制算法[J].农业工程学报,2010,26(7):290-294.
[17] 孟华,龙惟定,王盛卫,等.适于系统仿真的表冷器模型及其实验验证[J].暖通空调,2004,34(8):17-20.
[18] 孙丽萍,霍然.北方蔬菜温室系统模糊神经网络控制器的设计[J].东北农业大学学报,2014,45(4):113-117.
[19] 张涛,蒋静坪,薛鹏骞.模糊控制在位置随动系统中的应用研究[J].武汉理工大学学报:信息与管理工程版,2007(10):24-27.
[20] 岳立柱.模糊结构元理论拓展及其决策应用[D].阜新:辽宁工程技术大学,2011.
[21] 曾光奇,胡均安,王东.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[22] 彭麟.蓄热式加热炉建模与优化设定方法研究[D].沈阳:东北大学,2012.
[23] 刘金琨.智能控制(第3版)[M].北京:电子工业出版社,2014.
[24] 李腾飞.模糊控制在过程控制系统中的应用研究[D].石家庄:河北科技大学,2013.
[25] 胡玉玲,曹建国.变风量空调系统末端的变论域模糊PID控制[J].控制工程,2008,15(5):564-567.
[26] 王耀南,刘治.智能PID控制器在工业对象中的应用[J].自动化仪表,2001,22(5):23-25.
[27] 刘玲玲.PID参数整定技术的研究及应用[D].郑州:郑州大学,2010.
[28] 王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
[29] 张吉礼.模糊—神经网络控制原理与工程应用[M].哈尔滨:哈尔滨工业大学出版社,2004.
[30] Servet S,Mehmet K,Hasan A.Design and simulation of selftuning PID-typefuzzy adaptivecontrol for an expert HVACsystem[J].Expert Systems with Applications,April,2009,36(3):4566-4573.
[31] Fadaei A,Salahshoor K.Design and implementation of a new fuzzy PID controller for networked control systems[J].ISA Transactions,2008,47(4):351-361.
