氢钟频移校准与相位无损切换
2018-03-21吴智斌
吴智斌,赵 军,李 冰,刘 安,刘 波
(1.西安卫星测控中心,陕西 西安 710043; 2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
时钟的质量依赖于它的稳定性和准确性[1]。航天测控时频系统都配置了高稳定度和准确度的铷原子钟为所有信号提供标准的频率源,确保各设备工作时序一致[2]。随着我国月球、火星等深空探测项目的持续开展,甚长基线干涉技术(VLBI)、全球导航定位系统(GNSS)等高精度的空间测量技术在航天测控工程中应用,对测控设备时间频率的准确度及稳定度提出了更高要求,频率准确度由10-11提高到10-13量级以上,稳定度也提高了2~3个量级,由1 s≤10-11、24 h≤10-12分别提高为1 s≤10-13、24 h≤10-15。为了满足深空任务对本地时钟参考源的高稳定度需求,深空测控时频系统的频率信号源配置了高性能的氢原子钟。可以说,应用高稳定度的氢原子钟是VLBI等技术成功工程实施的关键[3]。
所谓原子钟,就是利用氢、铷、铯等原子的能态迁移输出稳定振荡频率制成的极精密的计时器。氢原子钟即是利用氢原子从高能级态跃迁到低能级态时辐射的电磁波,将其作为频率标准去控制校准石英晶体[4]。氢原子频率标准在104~105s的时间间隔能提供10-15频率稳定度的频率标准[5]。
氢原子钟的短、中期稳定度都相对较好,但对温控和磁场稳定性要求较为严格[6]。在工程应用中,一方面,环境温度变化及微波谐振腔老化等会引起原子钟输出频率的漂移变化,从而导致氢原子钟长期性能变差[7],长期工作需依照外部标准频率进行校频[8];另一方面,主备2台氢原子钟在线热备份模式工作,当主备2台氢钟相位不一致时,时钟切换产生阶跃冲击,对后续的信道和终端设备工作会引入干扰冲激,这就需要进行主备氢钟相位的无损切换,从而确保切换后的频标或时间信号的连续性,最大程度的降低或者消除氢钟切换对后端设备产生的不利影响。
本文通过分析氢钟的工作原理及调频移相技术,设计了在工程实践中利用GPS信号进行氢钟频率线性漂移修正、备钟通过相位差测量追踪主钟保持相位同步的原理及实施过程,以期为日常更好地维护和使用氢钟,保持时间频率稳定度,保证时频信号的连续性,降低时频信号对后端设备的不利影响。
1 氢钟调频移相控制原理
1.1 氢钟的基本原理
文献[9-10]阐述了氢钟的基本原理,现用的氢原子频率标准多是主动型氢激射器,是利用氢原子的2个超精细磁能级F=1,mF=0~F=0,mF=0之间的跃迁来工作的时频基准,其相应跃迁频率为:
fH=f0+2 750H02
式中,f0=1 420 405 752 Hz;H0为工作磁场强度。其物理部分如图1所示,输出信号由原子与频率为1 420 MHz的微波腔共振产生,其中原子束源、选态磁铁以及储存泡、谐振腔位于10-4Pa的高真空室内。氢原子钟通常利用锁相环修正石英体晶振的频率漂移[11],即将量子部分输出的脉泽信号的优秀长期稳定度传递到晶振,同时保持晶振的优良短稳[12]。
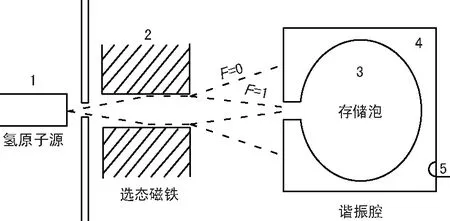
图1 氢钟物理部分工作原理
1.2 氢钟调频移相原理
氢原子能量跃迁自然振荡频率为1 420.405 7 MHz,氢原子经过选态磁铁,在谐振腔中消除其它杂散频率成分后,激发谐振腔内2个相互关联的晶体振荡器,最终输出频率Fout。氢钟谐振腔脉泽输出频率Fout=1 420.405 MHz,通过一系列的变频、放大和检相反馈处理后锁定压控晶体振荡器(VCXO),使其输出稳定的5 MHz、10 MHz、100 MHz和1 pps信号,如图2所示。
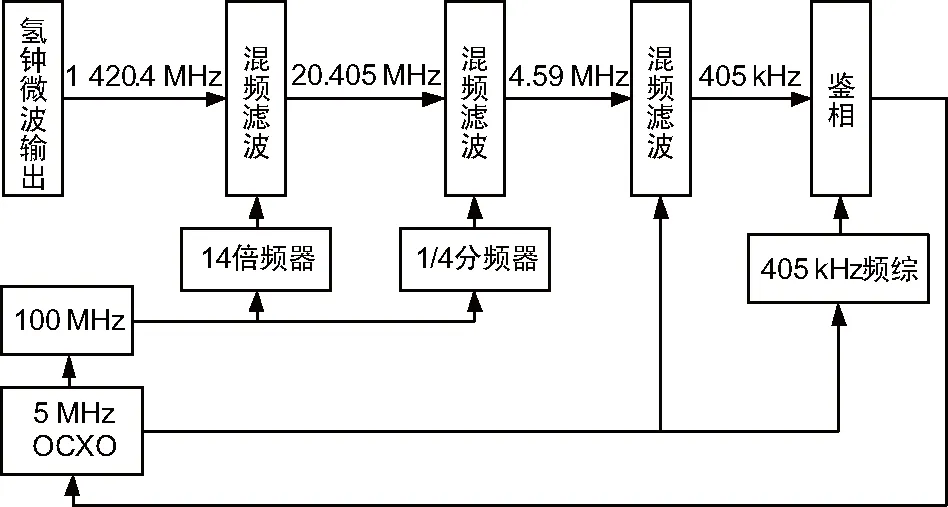
图2 氢原子钟频率综合框图
如图2中,在锁相环锁定的条件下,同步频率Vsynth可表示为:
Vsynth=Fout-284×VOCXO。
脉泽输出频率与5 MHz振荡器之间的关系为:
但是受内部磁场、场梯度、壁移、碰撞频率偏移、环境变化(包括室温、磁场、湿度、大气压、震动、重力和时间)和机械或电子部件老化等影响,该频率会偏离理论值[13]。
氢钟输出频率偏差Δy0可以通过数控振荡器产生频率和相位可控的正弦波对Δvsynth来步进调整补偿,步进补偿通过DDS(Direct Digital Synthese)输出可变频率和相位的波形,对氢钟输出频率的尾数进行微调校准。氢原子钟输出射频频率为Fout,5 MHz压控振荡器输出频率真值为X,DDS分频比为n,则
可见,氢钟最终输出的频标信号完全决定于其射频输出相位,改变DDS分频比,可以调整输出频标的频率真值对氢钟输出频率进行微调。
1.3 控制字

dFmas=9.09×10-6Hz,
折算到氢钟射频频率1 420.405 MHz上,最小控制步进比率为6.4×10-15。

其调频控制比率的最大范围在±3×10-8以内。调整后,DDS主用频率控制字为FM,氢钟频率调整后输出频率Fmas。
Fmas= 1 420 405 751.0+(FM-FM0)×
9.094 95×10-6Hz,
式中,FM0为[63(H),21(H),37(H),88(H)]。
2 频移校准
2.1 频移校准设计

由于频率偏差和时间偏差有负倒数关系,在实际工程应用中,由于时差测量比频差测量要简单,通常通过测量时间偏差计算频率偏差。
文献[14-15]论述了测量时钟长时间漂移的方法,在VLBI观测中,各观测站点之间的基线距离长,一般都以GPS或北斗等天基授时系统作为共同参考源,对接收的天基授时系统1 pps信号经过长时间的统计处理后,将其长期的高稳定数据作为基准与氢钟输出的1 pps信号进行时间差测量比较,计算出二者之间的频率漂移量。基于以上分析,本文设计了一种用时差测量来计算氢钟输出频率的长期漂移变化趋势,选取GPS的1 pps作为外部基准,利用时间间隔计数器对GPS接收的1 pps信号与主钟输出的1 pps脉冲信号进行长时间比对,通过二者之间的长期变化趋势输出控制指令调整主钟频率,补偿氢钟的频率长期漂移,其原理图如图3所示。

图3 氢钟频移校准原理
2.2 校准实施过程
在某个观测站点内,当时频系统与GPS时间校准初始化后,时间应按各自的原子钟自由运行,但由于氢钟输出频率的漂移,随时间推移会逐步偏离GPS时间基准,需要定期对氢钟输出频率和外部GPS时间频率进行比对调整,使得观测站点氢钟时间频率始终与GPS时间保持在一定的误差范围内。具体步骤如下:
① 以GPS为基准,将氢钟与GPS的1 pps输入时间间隔计数器进行时间差测量,测量时间一般需在48 h以上,以减小GPS接收数据的异常跳变、抖动和氢钟相位抖动带来的影响。
② 使用最小二乘法对测量的时差数据进行一次曲线Y=Ax+B拟合。其中A为氢钟相对于GPS的长期频率漂移率。氢钟频率漂移调整的目的即将A调整为趋于零,A存在2种变化趋势:一是当A大于零时,给氢钟置一负向、模为A的斜率值-A,即将氢钟频率尾数向低微调;二是当A小于零时,给氢钟置一正向、模为A的斜率值-A,即将氢钟频率尾数向低高微调。
③ 氢钟频率调整控制字。氢钟最小控制步进比率为6.4×10-15,则步进n为:
调整控制字为:
④ 向氢钟发送调整控制字进行频率微调。如某次氢钟进行频率校准,调整前频率为:1 420 405 750.352 550 Hz,经过时间间隔计数器72 h测量后得到氢钟与GPS的1 pps时差序列,剔除野值后,经过最小二乘法拟合。则有A=1.225 9×10-12。
步进
向氢钟发送的命令控制字为:
FM=FM0-19 145.789 7,
氢钟频率校准后输出频率为:
1 420 405 750.526 680 Hz,
经过时间间隔计数器72 h测量后得到氢钟与GPS的变化率为:A=3.180 4×10-14,满足10-13的指标要求。
3 相位无损切换
3.1 主备钟相位跟踪
根据氢钟指标,频率稳定度的阿伦方差不大于1.5×10-13@1 s,则1 s后10 MHz输出频差Δf为1.5×10-6Hz,经过133.3 s后,备钟相对主钟的时延为20 ps,相位漂移达到0.072o,1 851 s后主备氢钟相位差超过1°。按照氢钟技术指标,在2台氢钟自由运行30 min后必须对备钟进行相位校准才能在线切换。
Δf=α×f0=1.5×10-6Hz,
Δt=α×t≈2×10-9s=20×10-10s,
时频系统配置2台高精度氢原子钟,在线热备份模式。不同源自由运行的2台氢钟在切换时,输出的频标信号相位不一致时会出现一个阶跃变化,从而对后续的信道和终端设备工作产生冲激,如果在任务过程中实施切换,将会对测量和控制过程产生影响,严重时会造成终端设备重捕,影响任务流程。系统要求主备氢钟进行在线切换时,后端信道和终端设备收到的时间和频标信号应该是无损的,相位不连续性不大于1°。
对于相位测量采用将主钟和备钟输出的10 MHz频标输入至相位差测量单元,对2个信号的相位进行实时测量(如图4所示),以主钟为基准,对备钟输出的频标信号相位差进行处理,形成备钟调频控制量,按照一定的时序对备钟进行调频,使其输出的频标相位对主钟进行跟踪同步后,再按照一定的时序对备钟进行反向调频,使之始终与主钟保持同步,从而确保切换后的频标或时间信号的连续性,最大程度的降低或者消除氢钟切换对后端设备的不利影响。
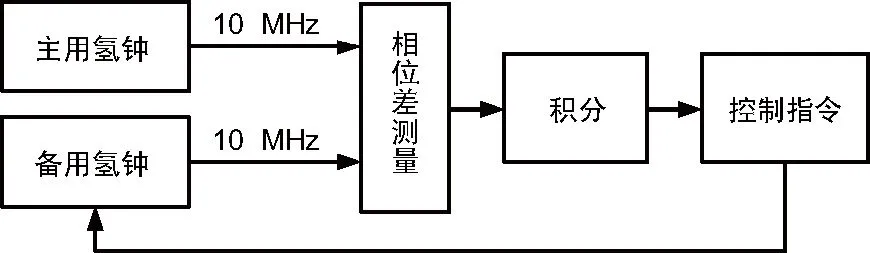
图4 主备钟相位无损跟踪原理
3.2 相位无损切换过程
相差测量值由相差测量单元的主备氢钟输入信号决定,以主钟10 MHz为基准,进行主备氢钟相差计算,根据相差计算备钟频率调整量,经过对备钟频率调整,则主、备钟相位差理论值恒定在ΔP附近。设计相位无损切换如下:
① 用相位测量单元测量主备氢钟10MHz信号的相位差ΔPi(1次/秒),在2 min内进行平均,产生一个相差平均值avg,
avg=-(ΔP1+ΔP2+…… +ΔP120)/120。
如果avg≤-180,则avg=avg+360;否则如果avg≥180,则avg=avg-180。
② 相位差对应的备钟频率调整控制量
式中,τ为氢钟频率调整时间。
③ 氢钟调整控制指令的控制字
④ 在τs内每秒向备用氢钟发送调频控制指令a,将备钟频率调整为f0+a×τ(备钟调整前频率为f0),调整过程中,备钟相位逐步向主钟逼近。
⑤ 待时间τs时间后主备氢钟相位一致,在τ~2τs内每秒向备用氢钟发送调频控制指令-a,使备钟频率回到频率f0。
如某次氢钟主备相位差测量为:-93.25o,设置为5 min调整时间,则
fc=8.634 3×10-11。
氢钟调整控制字
a=9.493 5×10-6+FM0。
在5 min内每秒向备钟发送a,主备氢钟相位差为0.08o,满足1o的指标要求,再次向备钟发送-a,使备钟频率恢复初始值。
无损切换调整结束后,主备氢钟相位在可接受的误差范围内,可保证主备钟切换后的频标或时间信号的连续性,消除氢钟切换对后端设备的不利影响。
3.3 结论
通过本文设计的频率漂移校准及相位无损切换的工程实施方法,对氢钟进行氢钟频率校准后输出频率测量,氢钟与GPS的相对稳定度由原来72 h内1.1×10-13提高到3.2×10-14,满足10-13的指标要求;主备氢钟相位差由原来72 h的1.03o减小至0.08o,满足1o的指标要求。因此,此方法在工程实践中切实可行。
4 结束语
氢钟的长期频率漂移与其所处的温控和屏蔽环境相关,为了减少频率漂移,氢钟都安放在恒温屏蔽空间,通常工作范围在20~25 ℃内,并且钟房内的磁场强度小于0.5高斯,波动小于0.05高斯,同时系统配置专用的温控、相位及频率测量装置。尽管如此设计,仍需要按照一定规则修正氢钟随温度等波动带来的频率漂移及主备钟自由运行的相位偏移。传统校正方法中,通过对氢原子钟进行建模,在后续算法处理中加入时钟模型估计,采用这种方法可以在一定程度上减小时钟频率漂移对后续信号处理影响。但是通常模型只能在一定程度上反映氢钟频率变化趋势,在实际应用中需要根据氢钟实际所处的环境条件以及工作参数进行不断调整,具有一定的应用局限性。
本文设计的频率漂移校准及相位无损切换的工程实施方法,工程可实现性较强,保证了氢钟的长期可靠运行,应用结果表明,本文方法满足了VLBI长时间跟踪对频率和相位的需求。
[1] 郝岩.航天测控网[M].北京:国防工业出版社,2004:105-140.
[2] 陈芳允.卫星测控手册[M].北京:科学出版社,1992:265-290.
[3] 翟造成,李玉莹,刘铁新.氢原子钟的空间应用前景[J].空间电子技术,2011(4):55-60.
[4] 施丽君,蔡勇.基于CORDIC算法的QDDS在氢钟锁相环中的应用[J].中国科学院上海天文台年刊,2010,31:132-139.
[5] 王正明,袁海波.氢钟和铯钟联合守时初探[J].天文学报,2007,48(1):71-83.
[6] 李树洲,王茂磊.肖胜红.环境温度对氢原子钟稳定度的影响[J].现代导航,2017(2):118-121.
[7] 王青媛,张更新,胡婧,等.一种基于时频分析的信号检测算法[J].无线电通信技术,2016,42(1):38-42.
[8] 翟造成,杨佩红.影响氢原子钟长期稳定度的系统效应分析[J].宇航计测技术,2008,28(3):9-14.
[9] 阎玉英,赵富.SC切恒温晶振老化特性补偿方法[J].无线电工程,2014,44(12):70-72.
[10] 杨浩,张燕军,刘俊,等.主动型氢原子钟吸气剂泵的实验研究[J].真空,2012,49(5):7-9.
[11] 张燕军,吴轶东,蔡勇,等.新型国产氢原子钟的设计改进及其在守时中的初步应用[J].计量学报,2009,30(3):261-266.
[12] 朱陵凤,李超,刘利,等.基于国产氢原子钟的钟差预报方法研究[J].大地测量与地球动力学,2009,29(1):148-151.
[13] 屈俐俐.氢钟守时应用[J].时间频率学报,2012,35(2):82-87.
[14] 朱陵凤,李超,韩春好,等.无线电时间比对中的时标偏差影响分析[J].无线电通信技术,2016,42(2):66-69.
[15] 马文起,吴智斌,李晶,等.高稳定度光纤时频相干传输技术研究[J].无线电工程,2015,45(11):44-47.
