模糊控制模型在水肥一体化中的应用研究
2018-03-21吴景来李家春陈跃威王永涛卢剑锋
吴景来,李家春,陈跃威,王永涛,卢剑锋
(1.贵州大学机械工程学院,贵阳 550025;2.贵州省水利科学研究院,贵阳 550002;3.贵州东峰自动化科技有限公司,贵阳 550025)
模糊控制是基于丰富操作经验总结出的、用自然语言表述控制策略,或通过大量实际操作数据归纳总结出的控制规则,用控制器予以实现的自动控制。与传统控制相比,模糊控制不需要对被控对象建立精确的数学模型,只需要积累对设备进行控制的操作经验或数据[1]。模糊控制方法是智能控制的重要组成部分。
可编程控制器PLC具有可靠性高、编程灵活、故障率低等一系列优点,目前PLC在工业控制行业已得到很广泛的应用[2]。但是随着被控系统的复杂性不断扩大,传统的PLC控制系统已逐渐不满足复杂的控制要求,因此将模糊控制引入PLC控制系统。由Matlab完成模糊控制算法,再将数据传递给PLC。结合Matlab仿真在复杂运算方面的优势和PLC控制系统稳定、可靠的特点,针对水肥一体化控制设计了一套采用模糊控制算法的控制系统[3]。由于施肥这种要求精度不是很高的系统,无法建立准确的数学模型。模糊控制基本上解决了用控制器模仿人类对这类系统进行的自动控制问题[4]。
1 系统的组成及其功能
现代农业就是在施肥过程中将适宜农作物生长的营养液通过水肥一体化设备供给农作物。水肥一体化系统的组成见图1。本系统根据山地特点,水源和田区不在同一个片区,多采用山区高位水池提供水源。主管道可以依靠高位水的压力进行灌溉,不需要泵提供动力,减少了资源浪费。系统由控制箱(包括PLC可编程控制器等器件)、灌溉管道、肥料液体混合罐、文丘里管、ECand pH值感应器、逆止阀、多种电动阀等几部分组成。当吸肥泵运行时,水流从主管道经由自动控制的电动阀进入水肥一体化设备,水流经过文丘里最窄处时,由于水流最快,产生负压[5]。此时若开启施肥电动阀,肥料液体便被吸取。可通过模糊控制来调节各施肥电动阀开启时间长短,从而控制各肥料液体施肥比例。EC值感应器用以监测管道肥料液体浓度,pH值感应器检测管道中肥料液体的酸碱度并基于此调整肥料液体的pH值。
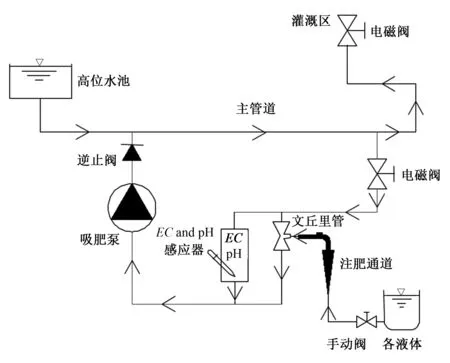
图1 水肥一体化系统组成Fig.1 Integrated system of water and fertilizer
2 水肥一体化模糊控制系统
由于水肥灌溉系统控制过程中参数的非线性和变化,无法建立其精确的数学模型,而常用的PID控制对于参数的变化比较敏感,限制了施肥灌溉系统控制效果的提高。模糊控制模拟人的行为,不需要被控对象精确的数学模型,控制性能对参数变化不敏感。该系统采用模糊控制技术与PLC系统相结合的方案,提高施肥灌溉系统的可靠性和水肥利用效率。
2.1 模糊控制原理
模糊控制是一种先进的智能控制技术,以模糊集合论和模糊语言变量为基础,通过模糊逻辑推理获得对被控量的控制。通常模糊控制器由控制规则库、测量输入模糊化、模糊推理算法及模糊判决等部分组成[6]。图2为模糊控制器的组成。
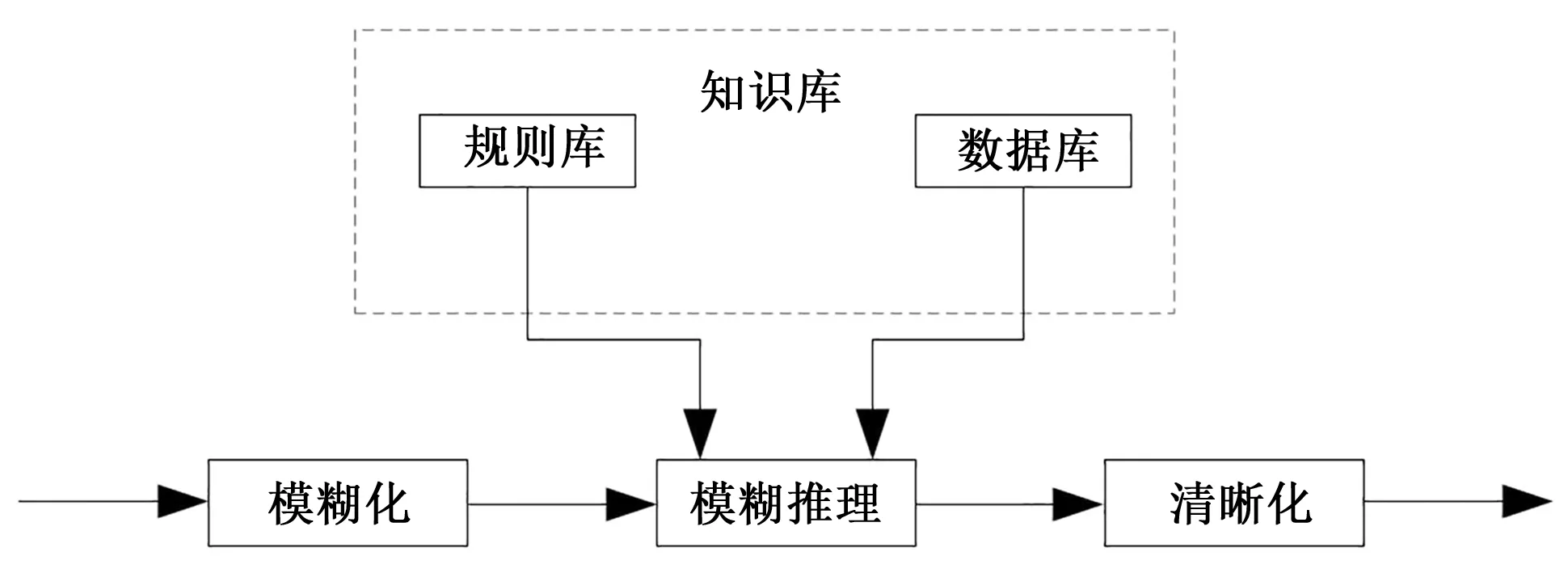
图2 模糊控制器的组成Fig.2 The composition of fuzzy controller
模糊控制系统的核心就是模糊控制器,模糊控制系统性能的好坏,主要是由模糊控制器的结构、模糊规则、推理算法,以及模糊决策的方法等因素所决定的。
2.2 模糊控制的实现
常见的模糊控制器有:单输入单输出、双输入单输出、多输入单输出和多输入多输出等[7]。本系统设计为双输入多输出模糊控制器。
水肥一体化设备主要是控制施肥过程中的肥液浓度和肥液pH值。液体肥料经由文丘里管与水配兑,再由吸肥泵注入主管道,与主管道的水相融合。系统通过模糊控制器控制电动阀开启时间的长短来调节主管道肥料的浓度,满足不同农作物的需肥要求,肥料浓度由EC传感器检测。图3为该系统模糊控制器的工作原理图。
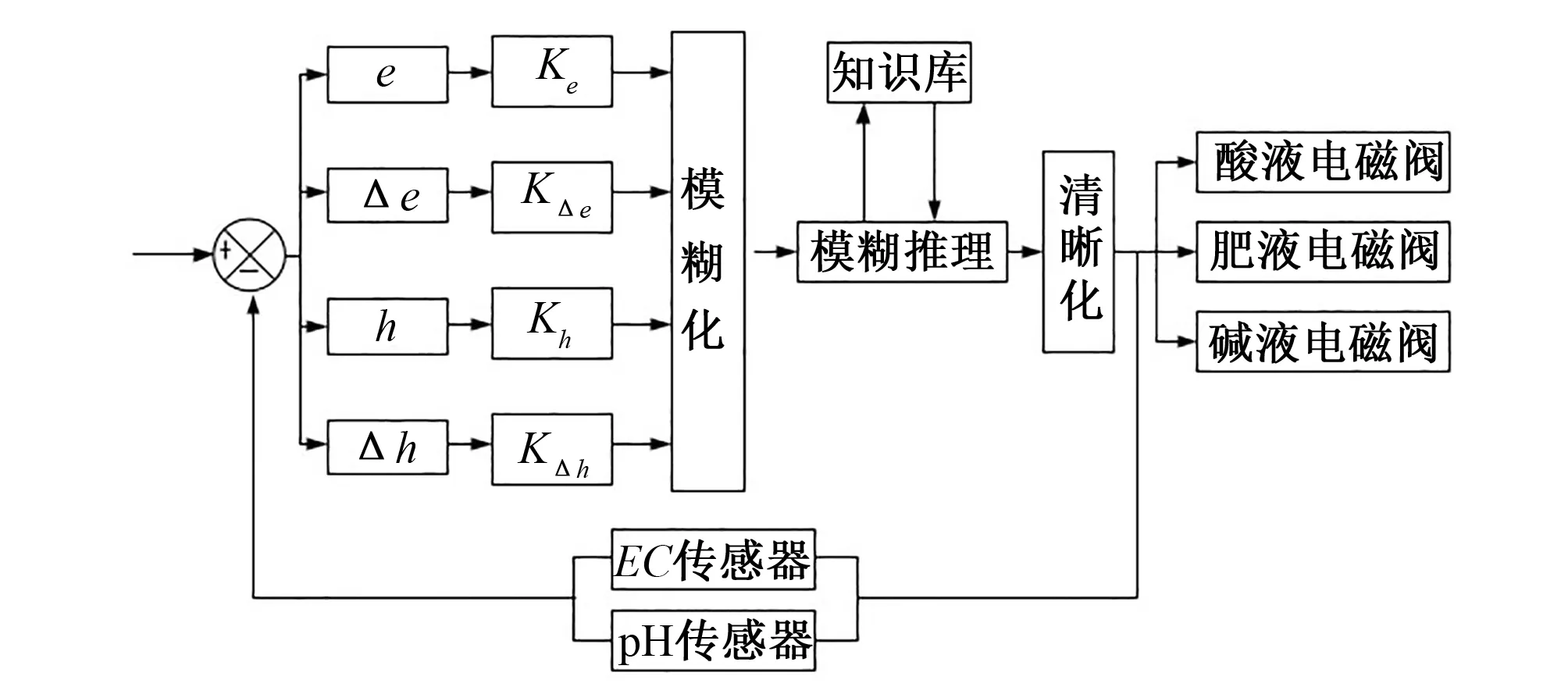
图3 模糊控制系统结构Fig.3 Structure diagram of fuzzy control system
电动阀的启闭根据主管道中肥液浓度和酸碱度的实时值分别与其初始给定值的比较差值来控制。其中e为浓度输入偏差;Δe为浓度输入偏差变化率;Ke为浓度输入偏差的量化因子;KΔe为浓度偏差变化率的量化因子;h为输入为酸碱度偏差;Δh为酸碱度输入偏差变化率;Kh为酸碱度输入偏差的量化因子;KΔh为酸碱度偏差变化率的量化因子。经过清晰化,本系统最终确定各个电磁阀的开启或关闭时间的长短。
2.3 各个输入量、输出量的量化
根据实际情况确定变量的模糊论域。共4个输入量,浓度差e,浓度偏差变化率Δe,pH值偏差h,pH值偏差变化率Δh;3个输出量,调节浓度的肥液电动阀开启时间U1,调节pH值的酸液电磁阀开启时间U2,碱液控制阀开启时间U3。浓度差e与pH变化量h,用5个模糊子集进行涵盖,即NB(过小)、NS(稍小)、Z(适宜)、PS(稍大)、PB(过大),对应的量化论域为{-2,-1, 0, 1, 2}。浓度偏差变化率Δe与pH值偏差变化率Δh同样用5个模糊子集进行涵盖,即NB(减少严重)、NS(减少稍重)、Z(没有变化)、PS(增加较多)、PB(增加过多),对应的量化论域为{-2,-1, 0, 1, 2}。各个电动阀开启时间肥液U1、酸液U2、碱液U3的模糊子集选取Z(常闭),DS(短时)、ZS(中时)、CS(长时),用4个模糊子集进行涵盖,对应的量化论域为{0, 1, 2, 3}。
浓度偏差e的基本论域为[-1,1],浓度变化率Δe的基本论域为[-0.2,0.2],pH值偏差h的基本论域为[6,9],pH值偏差变化率Δh基本论域为[-0.5,0.5];4者的模糊论语均为[-2,2],输出3个电磁阀得基本论域均为[0,12],模糊论域均为[0,3],则输入量e、Δe、h、Δh的量化因子Ke、KΔe,Kh、KΔh分别为:
(4)
输出量U1、U2、U3比例因子分别为:
(7)
2.4 模糊规则的确定
模糊子集的隶属函数根据需要选取三角函数[8]。当e为PB(浓度过大)、PS(浓度稍大)、Z(浓度适宜)时,肥液电动阀需关闭。当e为NS(浓度稍小)、NB(浓度过小)时,无论浓度偏差变化率Δe为多少,肥液电动阀都需要打开。当e为Z(浓度适宜)时,主要问题变为系统的稳定性问题。为了保持浓度的稳定,需要浓度偏差变化率Δe来控制肥液电动阀的开启时间U1。若为正,说明有减小的趋势,所以取较短时间的控制量。若为负,表示偏差有增大的趋势,所以取较长时间的控制量。模糊控制规则需要归纳我们人类的经验进行描述。一般用条件语句表达,如If浓度偏差is none and浓度偏差变化率 is none and pH偏差 is NB and pH偏差变化率 is NB then 肥液电磁阀 is none and 酸液电磁阀 is Z and 碱液电磁阀 is CS 语句含义为假如pH偏差过小并且pH偏差变化率过小,所以酸液电磁阀关闭,碱液电磁阀开启长时间。
根据模糊控制系统的特点以及以上规则语句得到相应的控制规则见表1、表2。
3 模糊控制器的设计
通过Matlab的FIS(Fuzzy Inference System)编辑器编写模糊规则见图4、图5。
通过FIS中的曲面观察窗,可直接看出输入与输出的关系,见图6、图7、图8。
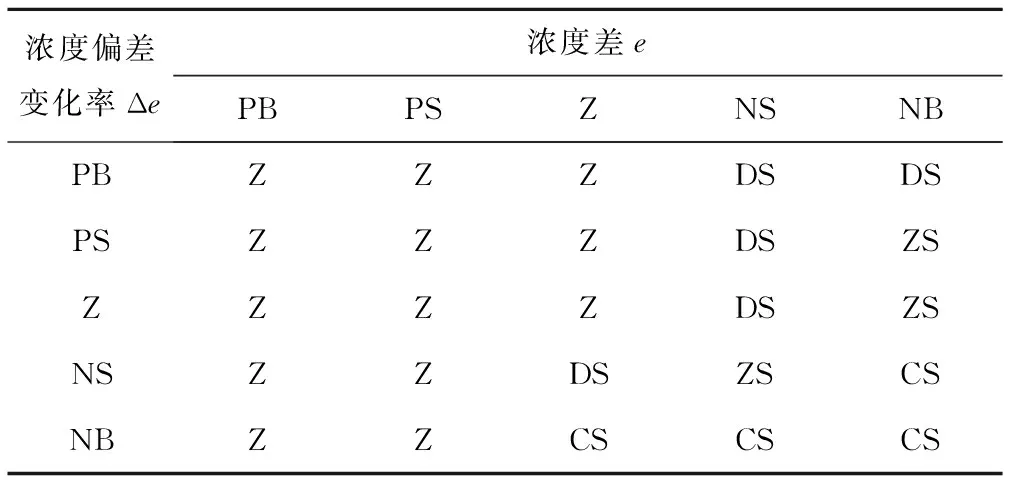
表1 肥液电磁阀控制规则Tab.1 Fertilizer liquid solenoid valve control rule table
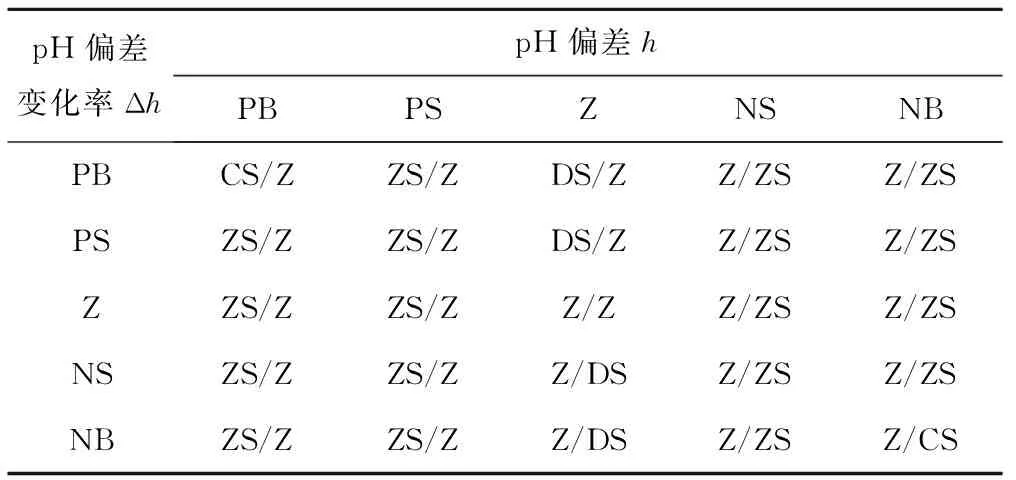
表2 调节pH值的控制规则(左边为酸液,右边为碱液)Tab.2 Adjust the pH value of the control table (on the left isthe acid solution, the right side is lye)
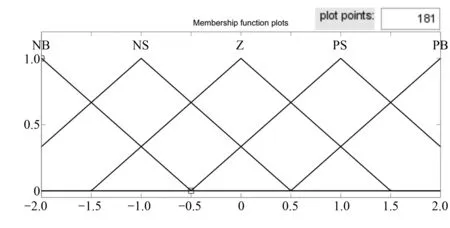
图4 浓度偏差、浓度偏差变化率、pH偏差、pH偏差变化率隶属度函数Fig.4 Concentration deviation, concentration deviation variation rate, pH deviation, pH deviation change rate membership function
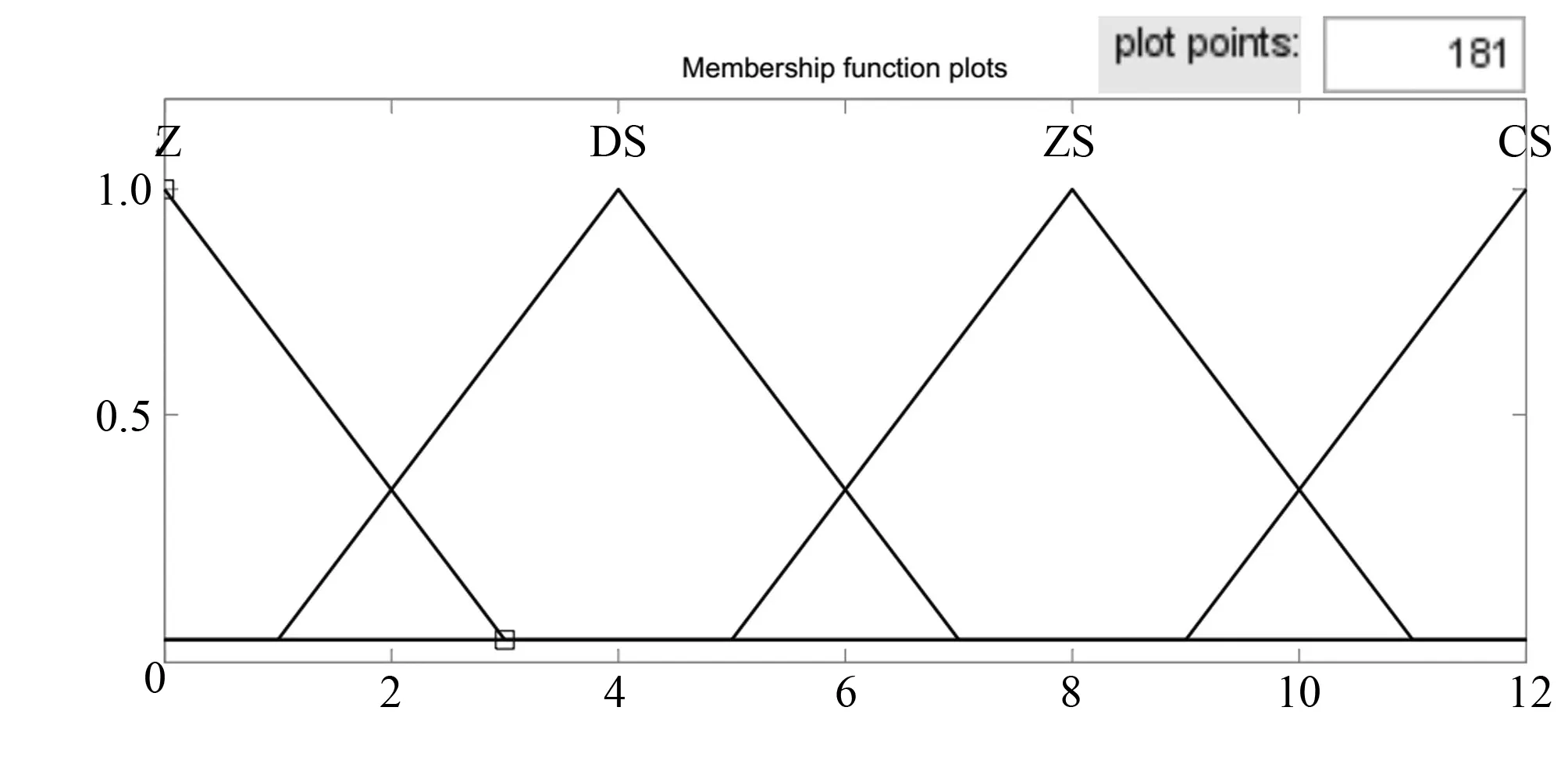
图5 肥液电磁阀、酸液电磁阀、碱液电磁阀隶属度函数Fig.5 Membership function of electromagnetic valve, acid liquid solenoid valve and lye solenoid valv
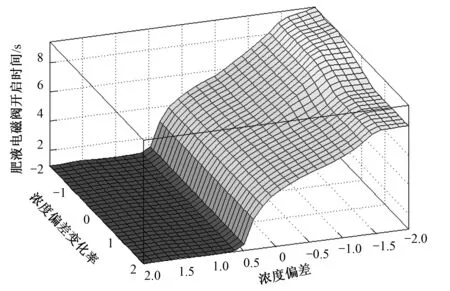
图6 肥液电磁阀输出特性曲面Fig.6 Output characteristic surface of electromagnetic valve for fertilizer liquid
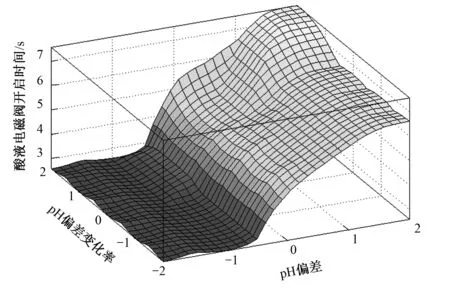
图7 酸液电磁阀输出特性曲面Fig.7 Output characteristic surface of acid hydraulic solenoid valve
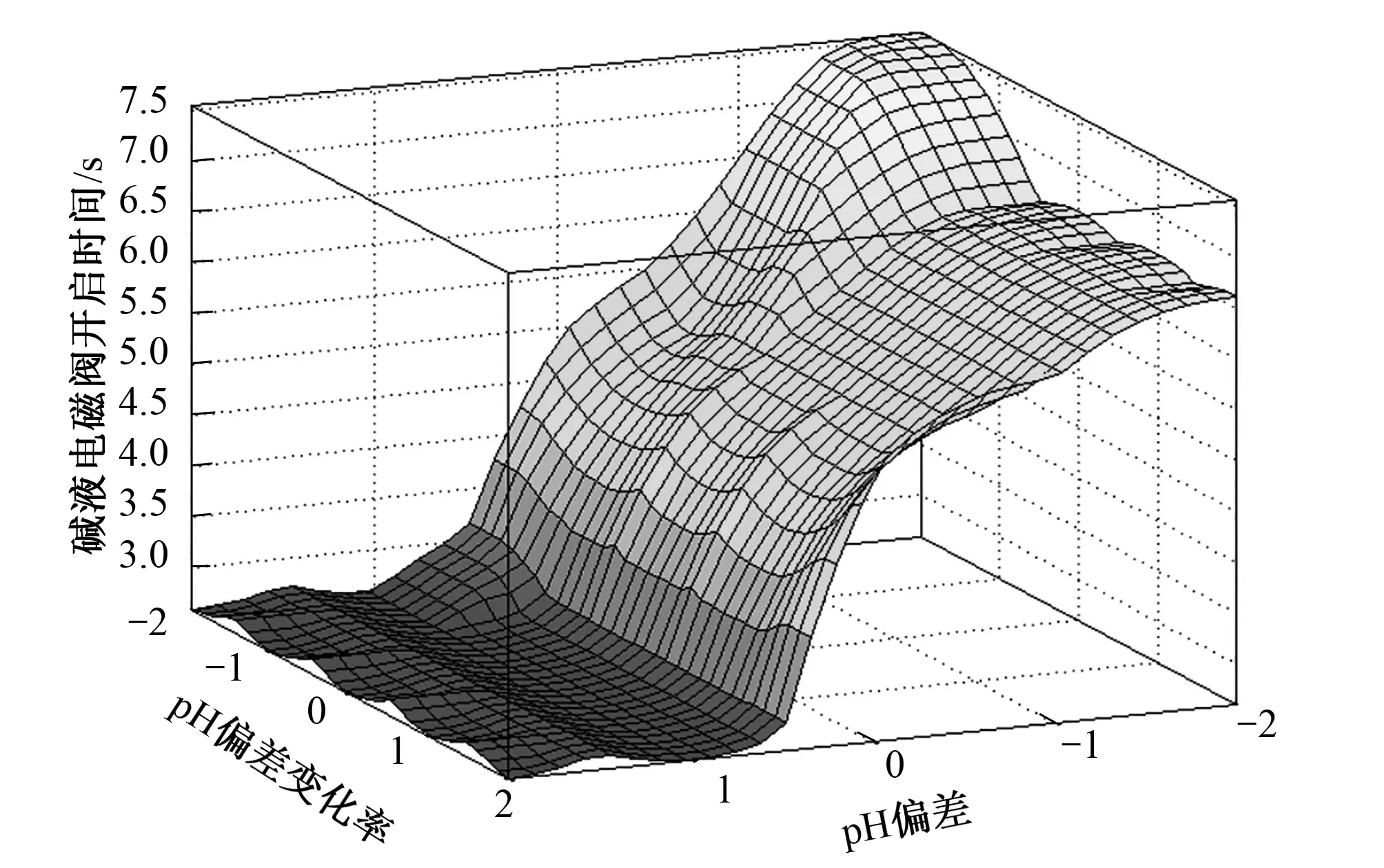
图8 碱液电磁阀输出特性曲面Fig.8 Output characteristic curved surface of lye solenoid valve
4 浓度以及pH值调节过程描述
施肥用肥料液体及灌溉水一般为弱碱性,灌溉水按照固定的流量加入到设备管道中,调节pH值用酸液和碱液,这个过程可以视为一个酸碱中和反应。pH值的中和过程数学模型计算框架为设备管道内剩余的物质的量等于流入管道内的物质的量减去流出的物质的量[9]。列出其动态数学模型如下:
(8)
式中:V为管道内的混合液体体积,m3;Nsc为流出液体的酸浓度,mol/L;qs为流入酸液的酸液流量,m3/s;Nsr为流入酸液的酸浓度,mol/L;qc为流出灌溉液体的总流量,m3/s。
(9)
式中:Njc为流出灌溉液体的碱浓度,mol/L;qj为流入碱液的流量,m3/s;Njr为流入碱液的碱浓度,mol/L;qf为流入肥液的流量,m3/s;Nfr为流入肥液的浓度,mol/L;qw为流入的灌溉水流量,m3/s;Nw为灌溉水的碱浓度,mol/L。
qc=qw+qf+qs+qj
(10)
根据pH值滴定方程得:
(11)
pH=lg [H+]Ckj=-lgKj
式中:pH为过程的输出变量;Kj为碱液的电离常数,水的电离常数Kw=10-14。
(12)
式中:Nfc为流出灌溉肥液浓度;tf为肥液电磁阀开启时间。 化简得:
qfNfr=qcNfc
(13)
公式(8)、(9)、(10)、(11)组成了施肥过程中pH值调节的数学模型。公式(12)、(13)组成了施肥过程中浓度调节的数学模型。
5 仿真分析
为了验证所设计的模糊控制器的性能,根据式(13)推导出的数学模型,对该系统进行仿真。本文构建的模糊控制系统,选取灌溉水的pH值为7.6,酸液浓度0.2 mol/L,碱液浓度0.2 mol/L,灌溉水流入流量为1.8 L/s,容器体积为125 L。
根据pH值调节过程,其传递函数表达式为带延迟环节的高阶传递函数,经过简化计算可得[10]:
(14)
在Matlab的Simulink模块下对所设计模糊系统进行仿真,见图9、10。图9为模糊控制模型,图10为模糊控制模型的单位阶跃响应曲线。
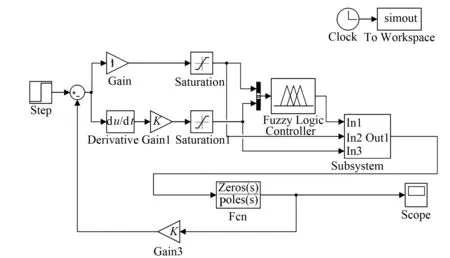
图9 模糊控制模型Fig.9 Fuzzy control model
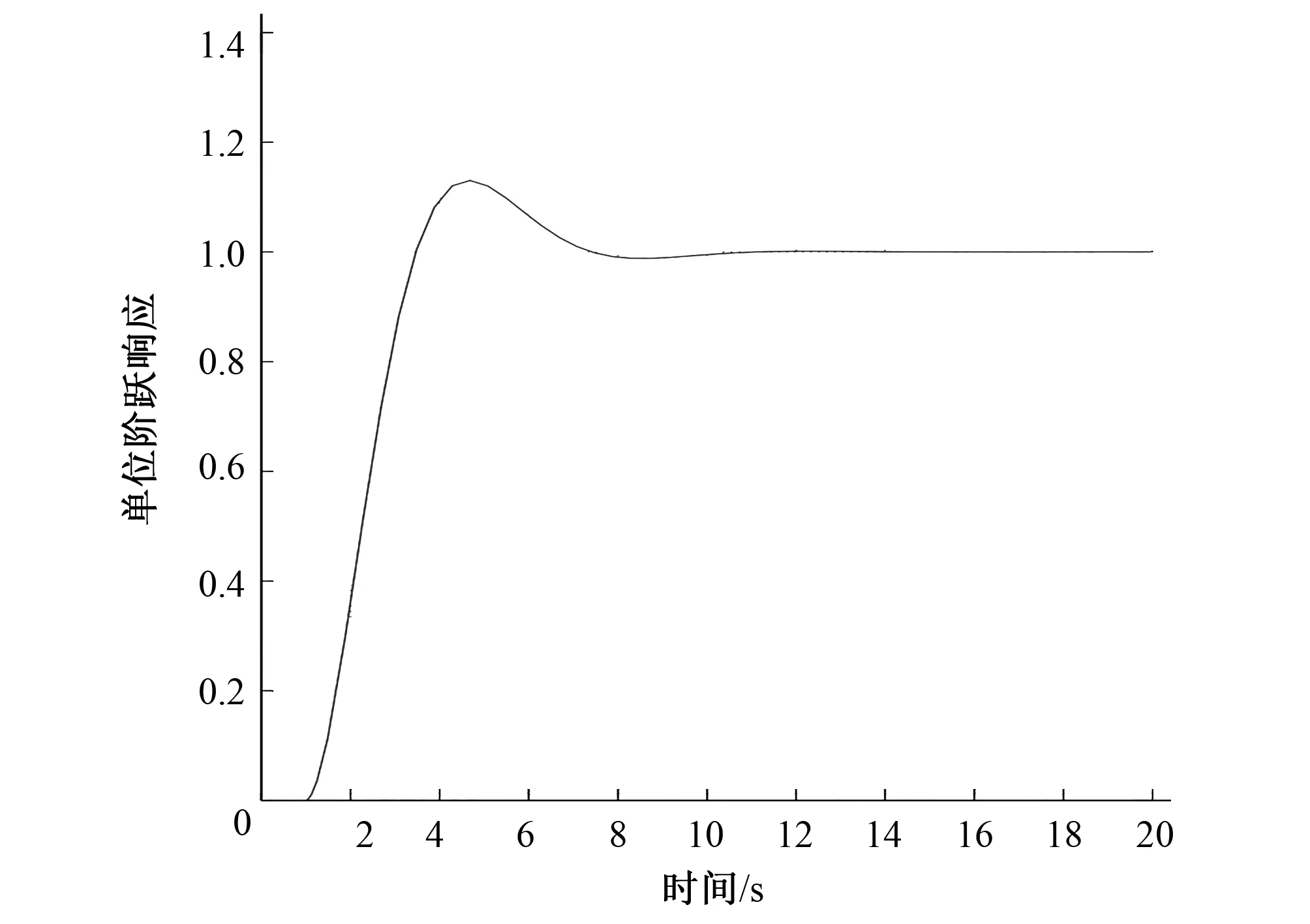
图10 模糊控制模型的单位阶跃响应曲线Fig.10 Unit step response curve of fuzzy control model
6 结 语
构建的模糊控制模型,单位阶跃响应曲线超调量较小,控制过程平稳、良好,未出现振荡现象。采用本文所设计的模糊控制模型比传统的PID模型控制性能优秀,超调量小,响应时间快,性能稳定。
基于PLC和模糊控制的各自特点,提出了在PLC上实现模糊控制的设计方法。这种方法提高了控制系统可靠性,优化程度好于传统的PLC控制系统。该系统比传统的水肥一体化控制系统更加精确,节约了肥料资源,也更能满足农作物生长对水肥的要求,提高了肥料的利用率。
□
[1] 石辛民,郝整清.模糊控制及其MATLAB仿真[M]. 北京:清华大学出版社,2015:25-26.
[2] 杨仁全,王 纲,周增产,等. 精密施肥机的研究与应用[J]. 农业工程学报,2005,21( Z):197-199.
[3] 李惠卓,张彦广,项宝珠,等. 花卉培养土的酸碱性及其调节的研究[J]. 河北农业大学学报,2003,26(3):53-56,68.
[4] 葛新成,胡永霞. 模糊控制的现状与发展概述[J]. 现代防御技术,2008,36(3):51-55.
[5] WRIGHT R A,COSTAS Kravaris. Nonlinear control of pH processes using the strong acid equivalent[J]. Industrial & Engineering Chemistry Research,1991,30:1 561-1 572.
[6] 韩 伟,马邕文,万金泉. 基于云模型在废水处理pH 控制中的仿真研究[J]. 计算机仿真,2015,32(5):432-435,440.
[7] 姚舟华,魏新华,左志宇,等.自动灌溉施肥机工作状态监控系统[J].农业机械学报,2012,43(增1):44-47.
[8] 叶建平,郑 萍,李建平,等. 基于多模式无线控制的PLC设计与研究[J]. 化工自动化及仪表,2011,(8):68-71.
[9] Zhang Xuan. Based on improved particle filter for mobile robot localization[D].Beijig: Beijing University of Posts and Telecommunications, 2010.
[10] 牛 寅,张侃谕. 基于云模型模糊推理的精准施肥机pH值调节过程控制[J]. 农业机械学报, 2016,44(6):2-6.
