导弹发射车状态监测系统设计
2018-03-21赵京坡王兰志崔孟楠
赵京坡,王兰志,崔孟楠,皮 俊,陈 鹏
导弹发射车状态监测系统设计
赵京坡1,王兰志1,崔孟楠1,皮 俊2,陈 鹏2
(1. 北京航天发射技术研究所,北京,100076;2. 湖南云箭集团有限公司,长沙,419503)
针对某型导弹发射车在实战化操作和综合保障方面的迫切需求,在分析该型发射车技术现状基础上,基于插入法进行信息化改造,设计并实现了一种适合该型发射车的状态监测系统。该系统基于CAN总线进行架构设计,便于分布式信息采集和功能扩展。采用高阻抗射极跟随电路、光耦隔离电路实现原有车载系统数字、模拟、串行通信等多种信号的采集,不影响原有系统的可靠性。经试验验证,该状态监测系统能够实现该型发射车在机动行驶、导弹发射流程中车载分系统的状态实时监测、数据记录和分析。该系统的应用可提高该型发射车在车载信息应用、作战流程可视化以及综合保障等方面的性能。
导弹发射车;信息化改造;状态监测系统
0 引 言
为适应信息化战争和实战化需求,武器装备作战平台信息化改造是当前实现武器装备信息化的重要途径,是提升在役武器装备作战效能的重要方法[1]。导弹发射车是具有运输、起竖和发射导弹等多功能的专用车辆,是导弹武器系统重要的组成部分,导弹发射车的信息化水平在很大程度上影响整个武器系统的作战效能。
某型导弹发射车(下文简称“发射车”)限于设计时的技术水平,在目前的作战运用中暴露了诸多不足,包括车载各分系统相对独立缺少信息交互、缺少发射车使用过程数据获取手段、发射流程信息显示手段落后等,亟需开展信息化改造。
1 某型导弹发射车信息化改造需求分析
某型发射车主要组成包括:底盘,供配电系统、控制系统,液压系统,定位定向系统,导弹测发控系统,指挥控制系统等。其中底盘实现发射车的载弹机动运输,并为上装设备提供承载平台;供配电系统包括柴油发电机组、整流装置、配电装置等,为发射车除底盘外的其他车载用电系统提供交流和直流电;控制系统协同液压系统及其他执行机构,实现发射流程发射车展开、导弹起竖和撤收等功能;定位定向系统在机动过程为指挥控制系统提供发射车经度、纬度、高程、航向等信息,在发射阶段为弹上惯组提供北向基准;导弹测发控系统实现导弹的测试、发射和控制等功能;指挥控制系统实现作战指挥、控制和通信等功能。
限于该型发射车研制时期的技术水平,发射车车载各分系统采用独立设计,相互之间无信息交互,未设置信息采集和存储设备;发射车底盘、供配电系统、控制系统等分系统的工作状态采用机械表或数码管显示,显示信息有限且不直观;发射车在出现故障时,依赖外观、声音等进行故障排查,排除故障时间长。该型发射车交付部队后,在训练、作战使用过程中逐步暴露了在操作使用和维修保障方面的不足。
针对该型发射车的以上不足,提出如下信息化改造需求:a)增加底盘、柴油发电机组的在线监测功能;b)提升控制系统操作过程的可视化效果;c)增加发射车主要分系统工作状态的异常报警功能;d)增加发射车行驶轨迹记录功能;e)设置车载各分系统工作状态和数据的记录装置,增加发射车主要分系统状态信息的存储、处理和统计分析功能。
2 状态监测系统方案设计和实现
为满足以上信息化改造需求,需要在该型发射车上加装状态监测系统。为了最小程度影响该型发射车原有技术状态,进行最小的改动,确保其在完成信息化改造后快速投入作战使用,采用插入法作为该型发射车信息化改造的实施方法。插入法是在现有武器装备平台上插入先进的信息装备,实现现有装备的战术技术指标性能提升,该方法具有投入少、周期短、见效快、效费比高的特点[2]。
2.1 状态监测系统总体方案设计
状态监测系统主要由底盘采集终端、供配电系统采集终端、控制系统采集及显示终端、信息处理主机、行车显示终端等组成,如图1所示。
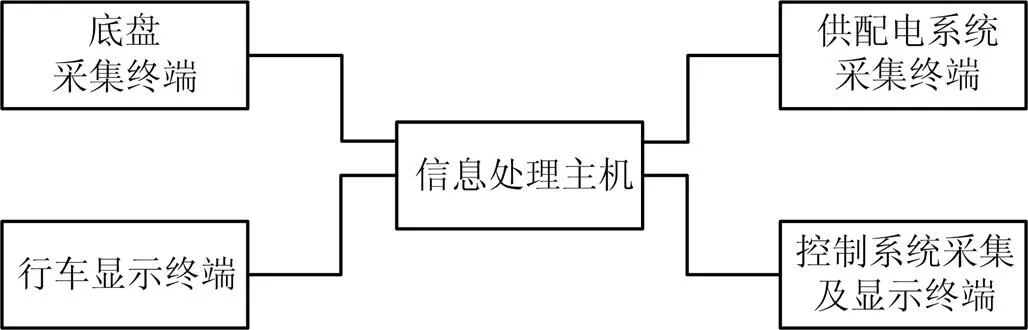
图1 状态监测系统组成
状态监测系统各组成部分的布局位置如下:
a)信息处理主机设置在发射车中部设备舱内;
b)底盘采集终端设置在发射车驾驶室仪表盘下方,就近采集车辆底盘的数据信息;
c)行车显示终端设置在驾驶室驾驶员位置右前侧,便于驾驶员观察;
d)供配电系统采集终端设置在供配电系统发电机组控制箱附近;
e)控制系统采集及显示终端设置在控制系统操控单元上方,便于操作人员观察。
状态监测系统各组成部分的具体功能如下:
a)信息采集主机是整个系统的核心,负责底盘、控制系统、供配电系统数据的接收以及整个系统的数据分析、处理和存储。信息采集主机配置以太网接口和USB接口,可实现对外的数据通信。
b)底盘采集终端设计有脉冲信号输入通道、数字输入通道和模拟量输入通道。其中脉冲信号输入通道采集发动机的转速、车辆的行驶速度,通过这些数据可以分析出发动机的工作时间、车辆行驶里程;模拟量输入通道采集发动机的温度、机油压力信号。
c)行车显示终端通过CAN总线接收信息采集主机传输过来的底盘、供配电系统和定位定向系统的工作状态信息、提醒信息以及报警信息,进行相应内容的显示并具有声音报警功能,及时提醒驾驶员进行维修保养。
d)供配电系统采集终端基于供配电系统的电压表获取工作电压,基于发电机组机油压力表获取机油压力信息,基于发电机组机油温度表获取机油温度信息,实现模拟信号向数字信号的转换。通过套装在供配电系统输出正极的线缆上的电流互感器测量供配电系统的工作电流。
供配电系统采集终端将电压、电流、发电机组机油压力、发电机组机油温度通过CAN总线传输至信息处理主机,信息处理主机一方面将这些信息进行存储,另一方面传输至行车显示终端进行显示。
e)控制系统采集及显示终端,采用光电隔离电路连接控制系统操控单元,将数码管控制信号转换为与实际工步相对应的信息,主要包括展车、起竖、回平、撤收流程控制指令,以及展车水平度、起竖角度、回平角度或撤收水平度反馈信息。控制系统采集及显示终端将这些信息以中文形式进行显示,并通过CAN总线传输至信息处理主机进行存储。
f)电缆网包括供电电缆、CAN总线电缆、信号采集电缆等,分别完成供电、CAN总线数据传输、传感器信息采集等功能。
2.2 状态监测系统采集信号梳理
状态监测系统首先要实现各主要分系统信号的采集,然后进行分析、显示和存储。状态监测系统采集的信号汇总如表1所示。
表1 状态监测系统采集信号汇总
Tab.1 Signals of the Status Monitoring System
分系统参数名称参数类型参数路数参数分辨率 底盘发动机转速/(r·min-1)数字信号1路1 发动机机油压力/MPa模拟信号1路1 发动机机油温度/℃模拟信号1路1 车速/(km·h-1)脉冲信号1路0.1 供配电系统电压/V模拟信号2路0.1 电流/A模拟信号2路0.1 发电机组机油压力/MPa模拟信号1路1 发电机组机油温度/℃模拟信号1路1 控制系统数码管控制信号数字信号85路— 定位定向系统经度/(″)RS422信号1路1 纬度/(″)RS422信号1路1 高程/(″)RS422信号1路1 航向/(″)RS422信号1路1
由表1可知,状态监测系统采集信号可分为模拟信号、数字信号、RS422通信信号、里程计脉冲信号,需根据参数不同的数据类型,采用对应的采集方法。
2.3 状态监测系统功能实现
为实现状态监测系统的相关功能,需要确定各单机的硬件连接方式和软件协议、表1中各类信号的采集方法、数据显示方式以及信息存储及处理方式等设计内容。
a)CAN总线连接方式。
底盘采集终端、供配电系统采集终端、控制系统采集及显示终端、信息处理主机、行车显示终端通过CAN总线进行连接,实现CAN总线数据的传输,总线采用CAN2.0B协议,波特率为250 kbit/s。
为了保证通信的抗干扰性和可靠性,在总线两端的高电平和低电平间各设置1个120 Ω的终端匹配电阻[3]。状态监测系统各单机连接方式如图2所示。

图2 状态监测系统CAN总线示意
b)模拟信号采集方法。
原始模拟信号首先经过滤波电路滤除干扰毛刺,再经过高阻抗射极跟随电路实现对原电路信号的采集,再经过光耦隔离电路,实现原电路供配电和采集终端供电的隔离,以确保采集终端供电对原电路无影响。隔离后的模拟信号经过A/D转换电路转换为数字信号,然后送入采集终端的CPU。模拟信号采集流程如图3所示。
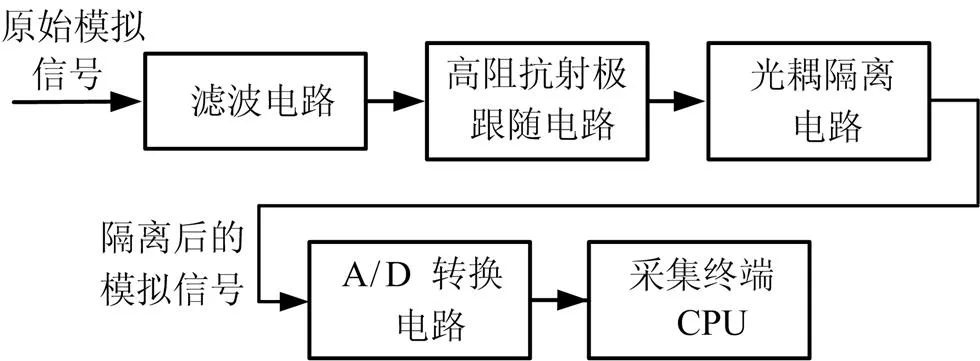
图3 模拟信号采集流程
c)数字信号采集方法。
原始数字信号(里程计信号除外)经过光耦隔离电路后,由采集终端的数字I/O口进行采集并解算成具有物理含义的信息。数字信号采集流程如图4所示。

图4 数字信号采集流程
d)脉冲信号采集方法。
以底盘里程计脉冲信号为例介绍脉冲信号采集方法。底盘里程计脉冲信号经过光耦隔离电路后,由底盘采集终端CPU进行速度解算得到发射车的行驶速度,再经过积分解算得到发射车的行驶里程。速度和里程信息获取流程如图5所示。

图5 里程计脉冲信号采集流程
e)供配电系统电流采集方法。
依据电磁感应原理,将电流互感器套装在供配电系统输出电压线缆的正极上,获取供配电系统的实时工作电流信息,如图6所示。
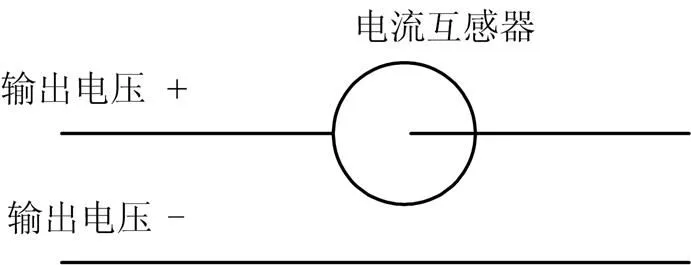
图6 电流采集示意
f)控制系统发射流程显示。
根据控制系统操控单元数码管控制信号与发射流程工步信息的对应关系,构建数码管信号对应关系文件,控制系统采集及显示终端软件根据数码管状态实现发射流程工步信息的中文显示。以起竖流程为例,控制系统采集及显示终端软件查询数码管信号对应关系文件,显示起竖过程起竖工步的中文信息、起竖角度以及故障的中文信息。展车、回平、撤收流程的实现过程与起竖流程相同。
g)行车显示终端信息显示。
行车显示终端接收信息处理主机发送过来的底盘、供配电系统和定位定向系统的数据,并实时显示底盘、供配电系统和定位定向系统工作状态,其中底盘转速、车速、里程,供配电系统工作电压、电流,定位定向系统的经度、纬度、高程、航向,按解算结果直接显示;底盘发动机机油压力、机油温度和供配电系统发电机组机油压力、机油温度,不仅要显示其数值,还要根据其数值范围给出报警指示。
底盘发动机机油压力、供配电系统发电机组机油压力报警指示根据其下限值设定值确定。底盘发动机机油压力正常范围为0.05~0.5 MPa,显示温度值,并以绿色指示灯指示;当低于0.05 MPa时以红色闪烁指示灯进行机油压力低报警。供配电系统发电机组机油压力正常范围为0.14~0.5 MPa,显示温度值,并以绿色指示灯指示;当低于0.14 MPa时以红色闪烁指示灯进行机油压力低报警。
底盘发动机机油温度、供配电系统发电机组机油温度报警指示根据其上限值设定值确定。机油温度范围为:+50~+150 ℃,其中+50~+130 ℃为正常范围,显示温度值,并以绿色指示灯指示;+130~+150 ℃为报警范围,显示温度值,并以红色闪烁指示灯指示。
h)信息处理主机信息存储及处理方式。
选用FLASH存储器作为数据记录的存储单元,实时存储信息包括:底盘转速、车速、里程、机油压力、机油温度,供配电系统电压、电流、发电机机油压力、机油温度,控制系统发射流程工步信息,以及定位定向系统的定位、定向信息。存储方式基于自动循环覆盖策略,即当FLASH存储空间不足时,将从存储单元初始位置覆盖原有存储数据,以保证存储最新数据。
为实现发射车状态信息的统计分析功能,开发了基于Windows操作系统的数据管理处理软件,构建了用于存储“信息处理主机”中数据的数据库。数据管理处理软件可以进行发射车各分系统状态的查看、历史数据查阅、故障报警信息显示、报表生成打印等,该软件的实现主要涉及软件架构设计、数据库设计、交互界面设计、软件代码实现和测试等,本文不对该软件展开论述。
3 状态监测系统车载状态试验验证
由于该型发射车交付部队使用时间长,对于温度、压力、车速等传感器,需要通过现场标定的方式获取其特性参数;对于发射流程过程信息显示,需要实际开展多次发射流程演练,将控制系统采集及显示终端的显示值与控制系统操控单元操作界面的数码管显示值进行对比,确认两者显示状态一致;对于定位定向信息,需要开展发射车实际跑车试验,将行车显示终端显示和记录的定位定向信息,与车载定位定向系统自身记录的数据进行对比,确认两者数据一致。
本文研制的状态监测系统在发射车上进行了发射车静态和动态跑车试验验证,各项功能均满足前文所需功能需求。
3.1 模拟信号传感器特性参数标定
对于模拟信号,采用分段插值方法得到传感器特性参数。以发动机机油温度传感器为例,在A/D转换电路前端获取某个温度值对应的电压信号,测试数据如表2所示。
表2 发动机机油温度测试数据
Tab.2 Test Data of the Engine's Oil Temperature
序号电压值/V温度值/℃ 14.4350 22.8090 31.15130 40.85150 50.67170
为降低对CPU计算能力的需求,采用拉格朗日插值公式的一次插值多项式拟合两个采样电压之间的温度函数[4]:
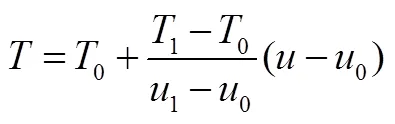
式中 为A/D转换电路前端电压值;为对应发动机机油温度;为临近两个采样电压值;为临近两个对应发动机机油温度。以为例,得出两个采样电压点之间任意电压对应的温度值,如测得电压为3 V,则可算得对应机油温度为85 ℃。按此方法得出拟合曲线如图7所示。
3.2 脉冲信号传感器特性参数标定
对于脉冲信号,采取多次取样求均值的方法得到传感器特性参数。以里程计传感器为例,测试得到的脉冲数与车速数据如表3所示,得出每个脉冲对应速度为0.4167 km/h。
表3 里程计测试数据
Tab.3 Odometer Test Data
序号速度/(km·h-1)脉冲数/个不同脉冲对应速度/(km·h-1) 15120.4167 215360.4167 320480.4167 425600.4167 535840.4167 640960.4167 7451080.4167 8501200.4167 均值0.4167
3.3 状态信息显示示例
以控制系统采集及显示终端显示界面为例,该界面可以显示发射流程过程中的控制指令、角度信息、工步信息、数码管状态、工作状态等,如图8所示。该种显示方式可显著提升发射流程的可视化效果。

图8 控制系统采集及显示终端显示界面
4 结束语
该状态监测系统具有如下优点:
a)基于CAN总线进行系统架构设计,便于分布式信息采集和功能扩展;
b)除套装在供配电系统输出正极的线缆上的电流互感器外,不增加其他传感器,对现有发射车技术状态影响小,便于工程实施;
c)基于高阻抗射极跟随采集及光电隔离电路,对原系统电路影响小,不影响原有系统的可靠性;
d)实现底盘发动机转速、里程、机油压力和机油温度等信息的采集和显示,一方面便于驾驶人员观察,另一方面保障人员可依据里程对发射车进行保养;
e)实现供配电系统工作状态实时监测,便于故障排查和对发电机组进行日常保养;
f)实现控制系统工步流程中文显示和故障信息显示,弥补了原控制单机数码管信息可读性差的不足,降低操作人员对数码管显示信息的记忆难度,避免导弹发射过程由于操作人员紧张出现的误操作;
g)信息处理主机能够实现底盘、供配电系统、控制系统工作状态的实时存储,可根据这些存储信息开展发射车的历史状态和故障查询,从而实现对发射车状态的评估。
该状态监测系统需要完善的方面:
a)该状态监测系统仅考虑发射车相关分系统的状态采集,未考虑与导弹相关的测发控系统,以及与作战指挥相关的指控控制系统;
b)该状态监测系统仅实现了单辆发射车的信息化改造,未实现车辆与车辆之间,车辆与作战控制中心之间的信息交互;
c)该状态监测系统仅实现了一些主要参数的异常报警功能,未实现整车级的健康管理功能,不具备故障诊断、故障隔离及故障预测功能。
综上所述,基于某型发射车进行信息化改造,所设计的状态监测系统能够提高该型发射车在车载信息获取和应用、作战流程可视化以及综合保障等方面的性能,有利于提升该型发射车的作战效能和实战化能力,对于其他类型发射车信息化改造具有一定的借鉴意义。同时,在整车系统级信息化改造、作战单元级信息化水平提升、健康管理技术应用等方面还有较大的提升空间。
[1] 杜茜,郭世贞. 武器装备作战平台信息化改造问题初探[J]. 装备指挥技术学院学报, 2007, 18(3): 39-42.
Du Qian, Guo Shizhen. Research on informationalized reformation of weapon's platform[J]. Journal of the Academy of Equipment Command & Technology, 2007, 18(3): 39-42.
[2] 阮方. 对武器装备平台信息化改造的若干思考[J]. 中国电子科学院学报, 2016, 1(1): 1-5.
Ruan Fang. Study of informationalization reconstruction of weapon equipment platform[J]. Journal of CAEIT, 2016, 1(1): 1-5.
[3] 焦圣喜. 基于CAN总线技术的车载网络系统设计[J]. 机床与液压, 2011, 39(17): 77-79.
Jiao Shengxi. Design of in-vehicle network system based on CAN bus technology[J]. Machine Tool & Hydraulics, 2011, 39(17): 77-79.
[4] 刘萍. 数值计算方法[M]. 北京: 人民邮电出版社, 2002.
Liu Ping. Numerical computing methods[M]. Beijing: The People's Posts and Telicommunications Press, 2002.
Design of Status Monitoring System for Missile Launching Vehicle
Zhao Jing-po1, Wang Lan-zhi1, Cui Meng-nan1, Pi Jun2, Chen Peng2
(1. Beijing Institute of Space Launch Technology, Beijing, 100076; 2. Hunan Vanguard Group Co.Ltd, Changsha, 419503)
A status monitoring system is designed and implemented based on analysis of the vehicle's technique situation. Insertion method is adopted in the process of the vehicle's information reformation. The system’s architecture is based on CAN-bus, which is suitable for distributed information collection and function extension. The high-impedance emitter following circuit and photoelectric isolation circuit, which do not affect the reliability of the original system, are adopted to collect the digital, analog and serial communication signals of the original vehicle-mounted system. The test shows that the status monitoring system can realize real-time monitoring, data recording and analysis of the vehicle-mounted sub-systems, when the launching vehicle is driving or in the process of launching missile. The application of this system can improve the vehicle's effectiveness in terms of vehicle-mounted information application, combat process visualization, and integrated support.
Missile launching vehicle; Information reformation; Status monitoring system
1004-7182(2018)01-0084-06
10.7654/j.issn.1004-7182.20180117
TJ812.6
A
2017-08-01;
2017-10-09
赵京坡(1982-),男,高级工程师,主要研究方向为导弹发射总体技术
