飞行器的故障诊断与控制
2018-03-20滨州学院电气工程学院贾荣丛
滨州学院电气工程学院 贾荣丛 张 冉
0 引言
随着航空飞行科技的日益壮大,各式各样飞行器出现在人们的视野中,并且也变得越来越先进,系统构造复杂多样,功能巨大且种类繁多,分系统、子系统反复交织,彼此耦合,尤其是一些成本很高并且执行特殊任务的航空航天器,其中大多数是有唯一性的,所以对各部分以及各子部分的稳定性要求更为苛刻,理论上不容许飞行器系统在运行期间呈现任何异常状态。恰好是因为飞行器的高稳定性需求,使得对飞行器的故障进行诊断成为一个十分重要的研究课题。无论是在国内还是在国外,对于飞行器的故障诊断与控制的研究都是一项十分热门的话题。飞行器在运行使用中的可靠性和安全性,将直接决定了其完成任务是否高效率,以及能否带动相关产业的快速发展。
1 飞行器硬件设计
一个完整的四旋翼飞行器主要包括了以下几个部分:电源部分、数据收集部分、四旋翼实验平台和实时控制软件。四旋翼飞行器使用四个电动机作为飞行的动力,电动机对称安装在飞行器的前、后、左、右四个位置,每个电动机上都安装了一个旋翼,旋翼处于相同的高度的平面上,且四个旋翼的构造和半径都一样,旋翼1和旋翼3逆时针转动,旋翼2和旋翼4顺时针转动。四旋翼飞行器根据调整四个电动机的输出电压来改变旋翼转动速度进而改变飞行器上升的力,控制飞行器的飞行状况。因为飞行器是根据调整旋翼转动速度改变升力的大小,这么做会导致其飞行力波动很大,因此要有一个可以长久保持稳定的控制方式。四旋翼飞行器只有四种飞行状态的输入,却有六种飞行状态的输出。四旋翼飞行器的构造如图1所示,电机1和电机3逆时针转动的同时,电机2和电机4顺时针转动,所以当飞行器处于平衡状态时,不存在陀螺效应和空气动力扭矩效应。

图1 四旋翼飞行器结构示意图

图2 四旋翼飞行器垂直运动示意图
2 四旋翼飞行器的飞行原理
四旋翼飞行器本身拥有两组互相对称的旋翼,四旋翼飞行器根据调整四个电动机的电压来改变其转动速度,图2中,电机1和电机3进行逆时针转动,电机2和电机4进行顺时针转动。规定沿x轴正方向称为飞行器飞行的正方向,箭头在旋翼的转动平面的上面代表此电动机转动速度增大,在下面代表此电动机转动速度减小。
3 四旋翼飞行器的故障诊断
四旋翼飞行器的故障诊断方法如图3所示:

图3 四旋翼飞行器的故障诊断方法
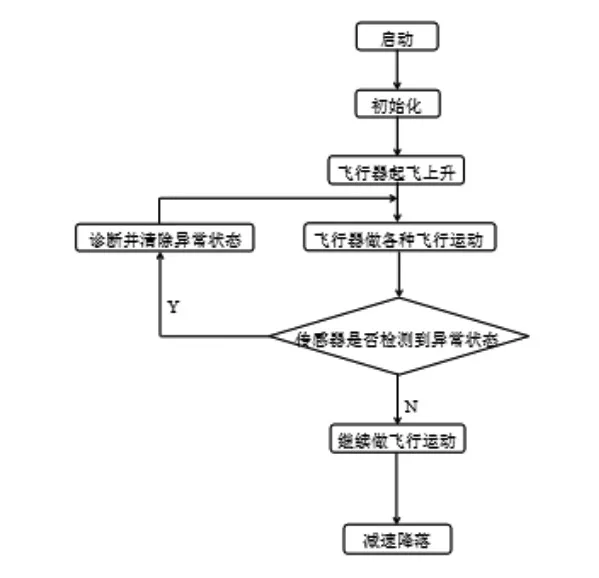
图4 四旋翼飞行器故障诊断流程图
4 四旋翼飞行器的定性模型
四旋翼飞行器是一种变量较多、耦合性高、不是线性系统的飞行机器,而且飞行器自身还有着质量、惯量等不能完全确定的的因素。针对这样的并不简单的系统,将飞行器的控制部分分解成内环和外环并且分开对两部分进行研究,外环由水平控制部分和高度控制部分构成,内环则由飞行状态控制模块构成。控制流程图如图4所示。
5 结论
四旋翼飞行器的异常状态取得的数据都是连续不断的,进行整理后分析一系列趋向点,把趋向点与获得的定性示意图绘于整理成一个图。利用每一个数据的定性示意图与提取的趋向点作比较,不难发现,由定性仿真的方式分析的参数的变换与利用仿真获得的图像大致相同,vx、vy、vz与sx、sy、sz在每一个定性点和定性点之间的变换也较正确地反映了真正的四旋翼飞行器飞行运动的变换,定性仿真分析出的数据与定量仿真曲线整合的特性点大致相同。在定性仿真的计算中添加了模糊值后,可以更加精确的描绘状态,从而能够提高故障的识别率。
[1]胡锦添,舒怀林.基于PID神经网络的四旋翼飞行器控制算法研究[J].自动化与信息工程,2015(1).
[2]王欣峰,任淑萍.基于LPC2138的四旋翼飞行控制器设计[J].工业控制计算机,2013(9).
[3]苏哲宇.一种微小型四旋翼飞行器控制系统的设计与开发[D].南京:东北大学,2012.
[4]B.Rojas de Gáscue,J.L Prin,D.Guerra,C.Urbina de Navarro.Journal of Thermal Analysis and Calorimetry[M].2013,V ol.67(2),pp.343-347.
[5]曾勇.四旋翼飞行器容错控制系统设计与实现[D].电子科技大学,2013.
