基于反步法非线性纯反馈系统的控制器设计
2018-03-20贾付金
贾付金,蒋 沅
(南昌航空大学 信息工程学院,南昌 330000)(*通信作者电子邮箱3394044951@qq.com)
0 引言
与一般非线性系统如下三角系统或者严格反馈非线性系统相比较,非线性纯反馈系统[1-2]是更一般的系统,更能反映实际事物的情况,因此近几年来受到广泛的关注,成为研究的热门。
1991年Kanellakopoulos等[3]较早地提出并研究了一类纯反馈非线性控制问题,按照反步法的思想,经过坐标变换,给出了严格反馈系统全局调节和全局跟踪的自适应控制器设计方法。然而,由于纯反馈非线性系统存在非仿射函数,这给控制器的设计带来了困难,也因此传统适合于严格反馈的非线性系统的控制器设计方法很难直接用于解决纯反馈非线性系统的控制问题。在文献[3]的基础上,Seto等[4]针对一类纯反馈系统控制,在没有使用任何状态变换的情况下,基于自适应理论[5-7],设计出了使得系统全局调节和全局跟踪的控制器设计方法,但是该方法不能保证系统全局有界,然而,系统全局有界又是控制理论最基本的要求。为此,刘勇华[8]研究了纯反馈系统的跟踪问题,提出了一种新的坐标变换,利用反步法,递推出了可使跟踪误差渐近的稳定和全局信号有界的控制器;但是根据文献[9-10]可知,纯反馈系统会存在状态的非仿射性函数和控制输入的非仿射性函数,刘勇华[8]只解决了状态存在的非仿射结构,而没有解决控制输入的非仿射性问题。于是,曾喆昭等[11]针对一类单输入单输出非仿射性非线性系统,结合滑模控制方法[12-13],提出了一种自学习滑膜抗扰控制,最终可使得系统跟踪误差渐近稳定和全局有界;只是曾喆昭等[11]研究的对象只是针对二阶系统,对于大于二阶的系统该方法则无能为力。对此,胡云安等[14]以n阶非仿射性纯反馈系统作为研究对象,结合神经网络理论和反步法,提出了自抗扰控制器;但由于引入较多的变量和复杂的公式计算,这样使得该方法较为复杂。所以,如何相对简单地设计出能够使得非线性纯反馈系统的跟踪误差渐近稳定和全局渐近有界的控制器是一个值得注重的问题。
对于状态存在的非仿射性结构项而言,避免传统坐标变换的弊端,本文从另一角度提出了一种非传统状态变换,经过变换后,设计虚拟控制器,可使新状态之间呈现出线性关系,所以设计控制器相对于以往的状态变换来说更容易。对于非仿射控制输入可能存在的非仿射性项,在利用上述非传统坐标变换递推时,会有多个控制器存在的问题,对于这种情况,本文引入了一个关于控制输入的辅助控制系统。这样,不仅能成功地解决对于这类非仿射性控制输入的难得到问题和多样性问题,而且与反步法结合构造出的辅助控制器,可使得纯反馈系统状态全局有界和能够跟踪到给定信号,也即跟踪误差趋于为零。最后,仿真实验将本文与文献[8,11]中仿真实验系统的仿真效果作了比较,说明了本文提出的算法的优越性。
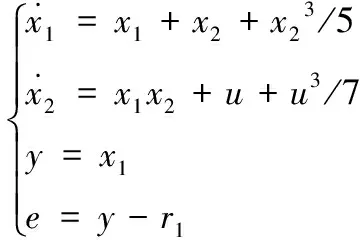
1 系统和问题描述
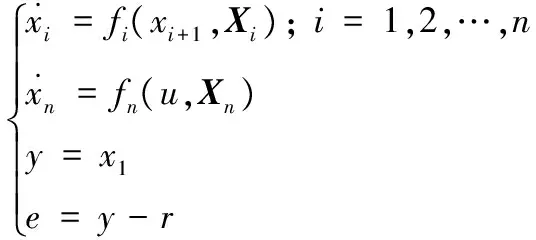
考虑如下非线性纯反馈系统:
(1)
其中:(x1,x2,…,xn)∈Rn为系统已知状态,Xi=(x1,x2,…,xi)∈R1×i;u∈R为控制输入;fi(xi+1,Xi)是带有系统状态xi+1的光滑非仿射性已知函数;fn(u,Xn)是带有控制输入u的光滑非仿射性已知函数;y∈R为系统输出;r为有界且n+1阶导数也有界的跟踪信号。
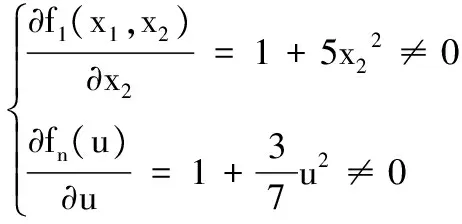
在进行控制器设计时,为避免出现系统的能控问题,作出如下假设。
假设1 对于函数fi,fn,使得在任意时刻
(2)
这样,就避免了系统(1)出现能控性问题。
对于系统(1),由于非仿射非线性函数fn的存在,使得控制器u的设计很困难。为此,引入式(3)控制器辅助的一阶系统:
(3)
其中:w为待定函数。从某种意义上说,引入式(3),是把控制输入看成系统状态,只要设计出待定函数w,任意初始值的控制输入也就生成,从而避免了过多繁杂的公式计算。
问题描述 对于以上纯反馈系统(1)和辅助系统(3)组成的增广系统,通过非传统坐标变换,利用反步法(Backstepping)和Lyapunov函数设计出辅助控制器w,使得系统全局渐近稳定有界,且跟踪误差趋于稳定。为清晰说明本文的设计思路,在此给出其控制方案流程如图1所示。
2 控制器设计
为了设计控制器,使得非线性系统(1)全局稳定有界,避免非仿射性性函数带来的复杂性,现在定义如下形式的非传统状态变换式(4):

(4)
其中:(a1,a2,…,an)为虚拟控制器,且xn+1=u。
在传统变换[15]中,常常把xi+1为第i个子系统的虚拟控制器,也因此采取的变换为:
(5)

图1 控制方案流程

基于反步法和非传统状态变换(4),控制器设计的具体步骤如下。
1)第1步。
根据式(1)和式(4)可知:
(6)
设虚拟控制器:
(7)
其中c1为待定正常数。
把式(7)代入式(6)得:
(8)
设Lyapunov函数为:
根据式(8),能够得:

(9)
2)第2步。
根据式(1)和式(4)可知:
(10)
设虚拟控制器为:

(11)
其中c2为待定正常数。
把式(11)代入式(10)得:

(12)
设Lyapunov函数为:
根据式(12),能够得:
(13)
3)第3≤i≤n-1步。

(14)
设虚拟控制器为:
(15)
其中ci为待定正常数。
把式(15)代入式(14)得:
(16)
设Lyapunov函数为:
根据式(16),能够得:

(17)
4)第n步。

(18)
设虚拟控制器为:

(19)
其中cn为待定正常数。
把式(19)代入式(18)得:
(20)
设Lyapunov函数为:
根据式(20),能够得:
(21)
5)第n+1步。
(22)
设辅助控制器为:
(23)
其中cn+1为待定正常数。
把式(23)代入式(22)得:

则可以得到:
(24)
定理1 对于满足假设1的非线性纯反馈系统(1),采用辅助控制器(23),则系统跟踪误差全局渐近有界,切闭环系统所有信号全局有界。
证明 选取如下Lyapunov函数:
结合上述推导过程,对V求导得:
(25)
其中,λ=min{2c1,2c2,…,2cn+1}。
对式(25)两边沿着[0,t]积分,可得:
V=V(0)e-λt
(26)

证毕。
3 数值仿真
例1 考虑文献[11]中的非线性仿真系统,如式(27)所示:
(27)
其中:(x1,x2)为系统状态;u∈R为控制输入;y∈R为系统输出;x2+x23/5为状态非仿射性结构;u+u3/7控制输入非仿射性结构;e为跟踪误差,跟踪信号用文献[11]中的r=sin(t) cos(t)。
由于:
(28)
可知满足假设1,则同样可以用本文提出的方法解决系统(27)的跟踪问题。
根据上述理论和式(23),通过理论推导得出辅助控制器:
(1+3x22+5x24)z2]
(29)


图2 两种算法跟踪效果对比(例1)

图3 两种算法控制律u对比(例1)

图4 本文算法仿真的系统状态x2(例1)
Fig. 4 Simulation system statusx2of the proposed algorithm for example 1
从图2(a)、图3可以综合看出,本文所提供的算法可保证系统(27)跟踪误差全局渐近稳定,且闭环系统有界。
在相同的系统(27)下,在图2中:由图2(a)可知输出y大约用0.5 s跟踪到跟踪信号r,且没有阶跃;而利用文献[11]提供的算法仿真得到图(b),控制输出y大约用4.5 s跟踪到跟踪信号r,且大约在0.2 s处有一定的阶跃。所以相比之下,本文的算法在跟踪效果上较快,且没有阶跃。
同样,在控制u仿真的效果对比上,如图3(a)和(b)所示,不难看出,本文的仿真效果图3(a)与利用文献[11]算法仿真效果图3(b)相比,本文算法仿真出的图像没有阶跃,且没有高频的抖振现象。
例2 考虑文献[8]的仿真实例中的非仿射性非线性系统,如式(30):

(30)
其中:(x1,x2)为系统状态;u∈R为控制输入,由于系统(30)不存在输入控制的非仿射结构,但是函数-e-x2+0.1x2为状态非仿射性结构,所以可用本文提出的非传统状态变换来处理;y∈R为系统输出;e为跟踪误差;为了更好地与文献[8]作比较,现取文献[8]仿真实例中的跟踪信号r=1.5 sin(2t)。
由于:

(31)
可知满足假设1,则可以用本文提出的方法解决系统(30)的跟踪问题。
根据上述理论和非传统状态变换(4),通过理论推导控制器:
(32)


图5 两种算法跟踪性能对比(例2)
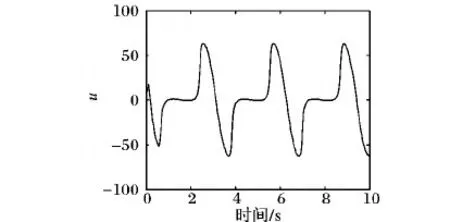
图6 本文算法仿真的控制律u(例2)
从图5(a)、图6以及图7可以综合地看出,本文所提供的算法可保证系统跟踪误差渐近稳定,且闭环系统信号有界。
在相同的系统(30)下,由图5(a)可知输出y大约用1 s跟踪到跟踪信号r;而利用文献[8]提供的算法仿真得到图5(b),控制输出y大约用3 s跟踪到跟踪信号r。所以可以得知本文的算法跟踪效果较快。
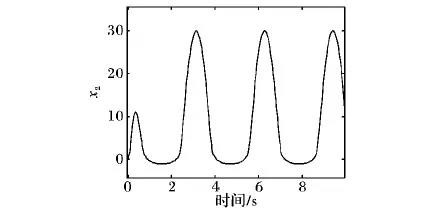
图7 本文算法仿真的状态x2(例2)
Fig. 7 Simulation system statusx2of the proposed algorithm for example 2
4 结语
本文研究了一类纯反馈非线性系统输出跟踪问题,利用了不同于传统的反推法,提出了一个新的状态变换,并且引用辅助系统(3),在满足假设1的前提下,利用Backstepping反推法,设计出辅助控制器(23),使得纯反馈系统具有下面结论:
2)与文献[4]相比较,本文所得到得控制器可使得系统输出误差渐近稳定,且可以保证闭环系统所有信号有界,而文献[4]方法讨论了系统输出误差问题,没有考虑系统全局问题。
3)与文献[16]相比较,对于控制输入存在的非仿射结构而言,本文仅仅引入了一阶辅助系统可以解决文献[16]中研究的问题,而文献[16]需要结合鲁棒控制理论和复杂的公式运算来完成控制器的设计,相比之下,本文在公式计算上简易。
References)
[1] LABIOD S, GUERRA T M. Adaptive fuzzy control of a class of SISO nonaffine nonlinear systems [J]. Fuzzy Sets and Systems, 2007, 158(10): 1126-1137.
[2] WANG D, HUANG J. Adaptive neural network control for a class of uncertain nonlinear systems in pure-feedback form [J]. Automatica, 2002, 38(8): 1365-1372.
[3] KANELLAKOPOULOS I, KOKOTOVIC P V, MORSE A S. Systematic design of adaptive controllers for feedback linearizable systems [J]. IEEE Transactions on Automatic Control, 1991, 36(11), 1241-1253.
[4] SETO D, WNNASWAMY A M, BAILLIEUL J. Adaptive control of nonlinear systems with a triangular structure [J]. IEEE Transactions on Automatic Control, 1994,39(7):1411-1428.
[5] TONG S C, LI Y M. Observer-based adaptive fuzzy backstepping control of uncertain nonlinear pure-feedback systems [J]. Science China Information Sciences, 2014, 57(1): 012204:2-012204:14.
[6] HUANG H, ZHANG Z. Characteristic model-based H2/H∞ robust adaptive control during the re-entry of hypersonic cruise vehicles [J]. Science China Information Sciences, 2015, 58(1): 012202:1-012202:21.
[7] MA K M, MENG G Z, ZHANG J W. Output regulation for a class of uncertain systems via fuzzy adaptive control [C]// Proceedings of the 2012 31st Chinese Control Conference. Piscataway: IEEE, 2012: 969-974.
[8] 刘勇华.一类纯反馈非线性系统的反推控制[J].控制理论与应用,2014,31(6):801-804.(LIU Y H. Backstepping control for a class of pure-feedback nonlinear systems [J]. Control Theory & Applications, 2014, 31(6): 801-804.)
[9] LI Y, ZHANG J H, WU X. Adaptive control of uncertain non-affine pure feedback nonlinear systems using backstepping techniques [C]// Proceeding of the 2014 33rd Chinese Control Conference. Piscataway: IEEE, 1829-1833.
[10] TONG S C, LI Y M. Adaptive fuzzy output feedback backstepping control of pure-feedback nonlinear systems via dynamic surface control technique [J]. International Journal of Adaptive Control and Signal Processing, 2013, 27(7): 541-561.
[11] 曾喆昭,吴亮东,杨振源,等.非仿射系统的自学习滑模抗扰控制[J].控制理论与应用,2016,33(7):980-987.(ZENG Z Z, WU L D, YANG Z Y, et al. Self-learning sliding-mode disturbance rejection control for non-affine systems [J]. Control Theory & Applications, 2016, 33(7): 980-987.)
[12] REN L T, XIE S S, MIAO Z G, et al. Fuzzy robust sliding mode control of a class of uncertain systems [J]. Journal of Central South University, 2016, 23(9): 2296-2304.
[13] SHANG W, TANG S J, GUO J. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082.
[14] 胡云安,程春华,邹强,等.非仿射纯反馈系统的间接自适应神经网络控制[J].控制理论与应用,2014,31(4):467-478.(HU Y A, CHENG C H, ZOU Q, et al. Indirect adaptive neural networks controller for non-affine pure-feedback systems [J]. Control Theory & Applications, 2014, 31(4): 467-478.)
[15] KRSTIC M, KANELLAKOPOULOS I, KOKOTOVIC P V. Nonlinear and Adaptive Control Design [M]. New York: John Wiley & Sons, 1995: 136-159.
[16] 张强,吴庆宪,姜长生,等.基于Backstepping的非仿射性非线性系统鲁棒控制[J].控制与决策,2014,29(1):19-26.(ZHANG Q, WU Q X, JIANG C S, et al. Robust control for nonaffine nonlinear systems based on backstepping [J]. Control and Decision, 2014, 29(1): 19-26.)
This work is partially supported by the National Natural Science Foundation of China (61663030, 61663032), the Natural Science Foundation of Jiangxi Province (20142BAB207021), the Scientific and Technological Project of Jiangxi Educational Committee (GJJ150753), the Open Foundation of Key Laboratory of Nondestructive Testing (Nanchang Hangkong University), Ministry of Education (ZD29529005), the Innovaion Fund Designated for Graduate Students of Nanchang Hangkong University (YC2016-S350), the “Small Invention, Small Manufacture, Small Creation” Key Projects of the Twelfth of Nanchang Hangkong University (2017ZD021).
JIAFujin, born in 1988, M. S. candidate. His research interests include nonlinear system theory, output regulation theory.
JIANGYuan, born in 1982, Ph. D., associate professor. His research interests include aircraft control design, motor control and optimization.
