基于信号强度差值的移动定位算法设计与实现
2018-03-19景海峰
景海峰,王 斌
(1.中国石油大学(华东) 计算机与通信工程学院,山东 青岛 266580;2.中国石油大学(华东) 胜利学院,山东 东营 257061)
0 引 言
在面向移动用户的众多业务中,移动定位业务LBS(location based service)是最近的一个新的增长点。现有的定位技术大多基于基站或者GPS,普遍存在需要额外加入模块、成本高、精度低等问题,对于高精度要求的室内应用场景并不适合,关于此类业务的还有基于无线局域网(wireless LAN,WLAN)技术的局部定位技术等[1]。无线局域网无疑是近几年迅速普及的小范围无线通信方式,在人员密集场所,其架设成本低、分布密集、传输速率达等特点非常适合进行移动定位服务。在无线局域网中的移动定位服务取得了一些成果[2],可在应用时去发现仍存在信号采集量大、场景切换时信号丢失、精度低等缺点仍然阻碍了定位业务的进一步推广[3]。本文面向移动定位业务,从涉及终端类型多、环境复杂、业务多样等特点出发,设计一种不增加额外模块且对现实环境干扰因素有一定免疫性的移动定位算法。
1 相关研究
目前已有的移动定位业务在以下方面仍然有进一步的提升空间:
首先,因为移动业务覆盖面积大、业务多样特别是密集环境中的数据采集、传输量大,很难做到精确记录用户坐标数据以及信号强度[4],而大量数据传输势必会影响正常用户上网体验。再者,移动定位业务通常是在办公楼和公共场所等复杂区域环境,建筑材料、场景切换都会影响到定位的效果[5]。第三,移动业务通常涉及种类繁杂的终端,各个终端的性能和接收参数各不相同,例如:各品牌的平板电脑、手机等。因此,提出的算法必须具有通用和普适特性[6]。第四,某些场景对于定位业务的要求非常高,例如:某些大型商场依托于定位业务提供的增值服务。所以,对于业务提供的精度要求在5m~10m甚至更小,已有的定位算法并不能满足这些用户的要求[7]。
在基于无线局域网的定位业务上提出的不足和用户对移动定位业务特殊要求的基础上,本文致力于研究一种面向无线局域网的强度差值定位算法。算法不是直接使用信号值而是采用信息量很小的信号差值,这能够减弱环境对信号传输造成的损耗,并能降低不同类型终端对接收性能造成的影响。同时,只是需要现有终端的信号强度数据就可以定位,不需安装额外的定位模块大大降低了生产成本,具有广泛的推广价值。
2 理论推导
经典室内传输损耗模型如式(1)所示[8]

(1)
式(1)中,地面遮蔽因子用FAF表示,路径损耗系数是n,终端收到的信号强度、发送功率、路径衰减分别用Pr、Pt、PL(d)表示,而距离信号发送处为d0处的路径衰减表示为PL(d0)。
鉴于室内环境复杂多变,在移动定位系统内对式(1)进行修改,可以获得如式(2)的室内传输损耗模型
(2)
其中,需要实际测量移动定位系统中建筑材料损耗系数λ。由式(2),则易求得路径损耗系数n为
(3)
根据式(3),在距离待定位设备的距离分别为d1,d2处,接收信号AP的接收功率Pr1应为
(4)
Pr2为式(5)
(5)
设两个终端间接收到的信号功率差值用ΔdB表示,单位为dB,根据上述两式可得式(6)
ΔdB=Pr2-Pr1
(6)
由式(3)~式(6)可得式(7)~式(9)
(7)
整理上式可得式(8)
(8)
进一步整理可得式(9)
(9)
将式(9)进行变换可得
(10)
其中:Δd=d1-d2, 假设d2.1=d2-d1=-Δd, 则可将式(10)变为式(11)
(11)
即可得式(12)
(12)
进一步推导可得式(13)
(13)
经过上述推导,可以获得两点位置距离d2,1和信号强度dB之间的关联公式。从式(13)可以看出,在由距离确定的双曲线d2,1中,焦点就是两个接收点的位置。如果牵扯到多个(≥3)接收点,可以获取这些接收点的强度差值,建立组双曲线,其交点就是待定位装置的位置。尽管周边接收装置可能在现实场景中都会接收到信号,但是本研究认为可设立阈值,强度小的接收点影响可以忽略不计,从而提高定位的准确性和实效性。
3 定位位置推算
在上节中,分别求得了接收设备上距离与信号强度差dB在d1和d2出的对应关系,下面将说明如何利用双曲线交点定位设备位置的方法。
作为定位精度最高的方法,在蜂窝网络中TDOA技术也采用双曲线相交定位设备坐标。通常一个一平方公里的基站内,定位精度可以达到50 m。对于本文的应用场景大大小于蜂窝网络,因此在理论上也可以获得比较高的精度。
对于某个已知位置的接入点,假设当前坐标为(xi,yi),(1≤i≤3)。假设待定位设备坐标为(xL,yL),根据上节的公式,可得式(14)

(14)
由式(14)可得
(15)
其中,待定位设备与第i个接收点之间的距离为di,由此可得

(16)
将式(15)代入,把式(16)展开可得
(17)
式(16)中,当i=1时,设xi,1=xi-x1,yi,1=yi-y1, 则可以将上述公式转化为
(18)
假设:接受信号的终端个数用M表示,i的区间为[2,M]。本文的应用场景较为简单,只考虑最多有3个接收信号最强的访问点,所以M=3。对于计算双曲线交点的方法,采用双曲线相交点求解方法,利用迭代求解的方法求解定位坐标Lx,Ly。
首先,假设
(19)
如果用(x1,y1)、(x2,y2)、(x3,y3)来表示场景中信号最强的接收点坐标,则可用(xL,yL)来表示待求定位点坐标,公式如下
(20)
式中:Gl如式(21)所示
(21)
h如式(22)所示
(22)
本文的应用场景为室内,定位前先设定起始坐标为信号强度最大的接入点坐标。假设该接入点距离待定位设备最近,同时设定门限值为0.1[9]。由上面的推导可知精确定位设备的流程为:第一,将接入点坐标设定为起始点(x0,y0),将其代入式(13)中,可获得3个接入点的dB值。基于这些值便可求解出对应的d2,1和d3,1。而Δx和Δy的值可在将上述坐标在代入式(20)~式(22)后求得。要想求得(xL,yL)的坐标公式,就将Δx和Δy代入xL=x0+Δx和yL=y0+Δy中,然后进行迭代。根据经验设定合理的门限值,迭代到小于事先设定的门限值后,可认为获得的(xL,yL)就是获取的估计坐标。
4 仿真分析与比较
分别在办公环境和走廊内对本文提出的算法进行性能分析。首先,在办公楼和走廊分别组建实验网络,限于场地实际条件,分别安装7个接入点[10],接入点的位置坐标已知。由于实验条件所限,强度值无法在现场检测,以移动设备检测接收到的信号强度值为准。采集过程中,利用移动设备,在各个采样点采集某接入点的强度值,并取前3个强度最大的值记录,将差值代入式(13),利用上节推导的迭代方法求得待定位设备坐标值。
采用MATLAB,引用基于距离-损耗模型的信号传播模型法进行定位估计的方法,根据采样数据,应用场景内的位置估计偏差、定位坐标、真实坐标见表1。

表1 应用场景内的位置估计偏差、定位坐标、真实坐标统计
应用本文提出的定位方法获得的误差距离累积分布如图1所示。由图可以看出1 m、1.5 m、2 m范围内的误差概率分别为10%、60%和80%。

图1 走廊场景中的定位误差距离累积
由图1可知:越靠近原点,也就是接入点则定位精度越高。而在距离接入点最远的第7和第8个测试点出现了最大偏差,达到了2.2 m,可以看出距离对定位精度的影响较高。但是总的来说,精度都小于1.7 m以下,基本达到了精确定位的预期目标。
图2是本文提出的强度差值法和经典的信号传播模型法的误差距离累积分布比较示意图。由图2中可以看出,在25%、50%、75%累积误差值时,信号传播发的距离分别是1.5 m、1.6 m和1.8 m,而本文提出的算法为1.2 m、1.4 m和1.8 m,精确程度略高于经典算法。
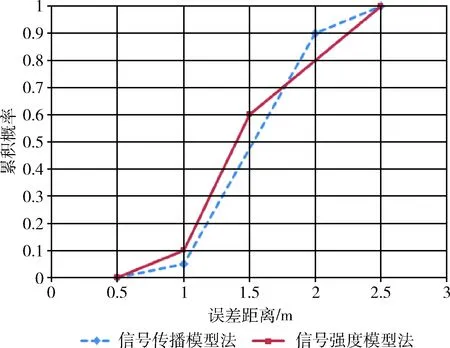
图2 走廊场景中定位误差距离累积比较
而在室内应用场景中,位置估计偏差、定位坐标、采样点真实坐标见表2。同样将本文提出的算法与经典的信号传播模型法进行定位估计的方法比较,结果见表2。
室内场景中的定位误差距离累积分布结果如图3所示。
由图3可知:与走廊场景类似,越靠近接入点定位精度越高。但是因为室内环境较为复杂,定位精度明显低于走廊场景,误差普遍在[1.5m,2.5m]的区间内。
图4是本文提出的强度差值法和经典的信号传播模型法的误差距离累积分布比较示意图。由图4中可以看出,在25%、50%、75%累积误差值时,信号传播法的距离分别是2.6 m、2.9 m和3.4 m,而本文提出的算法为1.4 m、1.75 m和2.1 m,精确程度略高于经典传播模型算法。
通过上述在走廊和室内场景中的实验结果不难得出以下结论:
首先,无论是在哪种环境中,本文提出的算法比经典定位算法具有一定优越性,并且精度在2 m以下,基本能够满足移动定位服务定制时用户精确定位的需求。其次,在走廊的场景中的定位精度要比室内场景中高,这也恰恰符合移动定位用户群大多在商场、楼梯等开放性场所进行定位的规律,所以说本算法具备一定的实际应用价值。
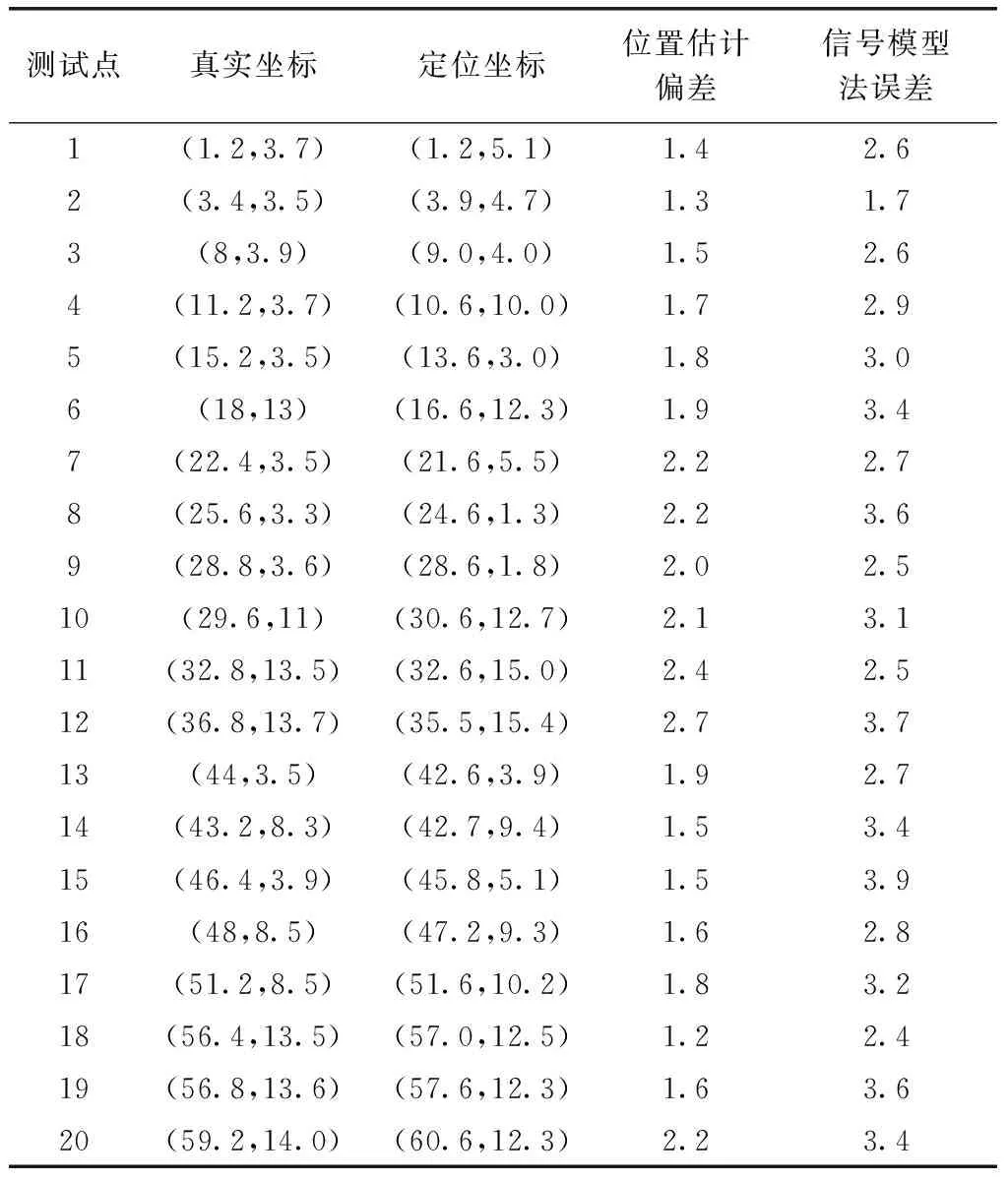
表2 室内场景中的位置估计偏差、定位坐标和真实坐标

图3 办公室场景中定位误差距离累积

图4 室内场景中与经典算法的误差距离累积比较
5 结束语
以移动用户在开放性场所的定位业务需求为导向,立足于接收信号强度差值,本文通过经典的移动定位室内损耗模型推导出了新的定位方法。通过实验推导,从接入点原点入手,用迭代推导的方式,获得了待定位终端的坐标表示方法。通过走廊场景和室内场景下,将本文提出的算法与经典的信号模型传播法进行比较,验证本文提出的算法具有一定优越性,且结果符合开放场所的精确定位需求,具有一定实际应用价值。
[1]ZHOU Rui,LUO Lei,LI Zhiqiang,et al.An indoor pedestrian positioning algorithm based on smartphone sensor[J].Computer Engineering,2016,42(11):22-26(in Chinese).[周瑞,罗磊,李志强,等.一种基于智能手机传感器的行人室内定位算法[J].计算机工程,2016,42(11):22-26.]
[2]LU Yin,MIAO Huihui.Study on WiFi location technology under complex indoor environment[J].Computer Science,2016,43(11):152-154(in Chinese).[陆音,缪辉辉.复杂室内环境下的WiFi定位技术研究[J].计算机科学,2016,43(11):152-154.]
[3]LEI Yuwei,XIU Chundi,YANG Wei,et al.Integrated WiFi and MEMS-IMU method in indoor positioning system[J].Journal of Navigation and Positioning,2016,4(16):81-87(in Chinese).[雷雨伟,修春娣,杨威,等.WiFi与MEMS-IMU融合定位方法在室内定位中的应用[J].导航定位学报,2016,4(16):81-87.]
[4]ZHOU Qizhen,XING Jianchun,LI Juelong,et al.An indoor localization method based on multi-data fusion[J].Microcomputer & its Applications,2016,35(22):72-76(in Chinese).[周启臻,邢建春,李决龙,等.一种多元信息融合的室内定位方法[J].微型机与应用,2016,35(22):72-76.]
[5]TIAN Guangdong,YANG Pinzhang,WANG Shan,et al.CSI indoor positioning based on Kmeans clustering[J].Application of Electronic Technique,2016,42(12):62-68(in Chinese).[田广东,杨品章,王珊,等.基于Kmeans聚类的CSI室内定位[J].电子技术应用,2016,42(12):62-68.]
[6]XU Kun,LIU Hongli,MA Ziji,et al.A linear programming algorithm for indoor localization in wireless sensor networks[J].Journal of Hunan University (Natural Sciences),2016,43(8):115-119(in Chinese).[徐琨,刘宏立,马子骥,等.一种用于室内定位的线性规划算法[J].湖南大学学报(自然科学版),2016,43(8):115-119.]
[7]HE Haiping,GUO Hang,FANG Shuang.Research of ZigBee indoor positioning system based on the fuzzy clustering[J].Measurement Control Technology and Instruments,2016,42(5):71-77(in Chinese).[何海平,郭杭,方爽.基于模糊聚类的ZigBee室内定位系统设计[J].测控技术与仪器仪表,2016,42(5):71-77.]
[8]GE Liufei,LI Keqing,DAI Huan.Wireless indoor location algorithm based on adaptive GRNN[J].Computer Engineering,2016,42(6):81-90(in Chinese).[葛柳飞,李克清,戴欢.基于自适应GRNN的无线室内定位算法[J].计算机工程,2016,42(6):81-90.]
[9]RAN Dongmei,JIANG Tai,LIU Dongjie.Indoor localization algorithm based on self-adaptive evolutionary extreme learning machine[J].Computer Engineering and Design,2016,37(3):788-792(in Chinese).[冉东梅,蒋泰,刘东杰.基于自适应进化极端学习机的室内定位算法[J].计算机工程与设计,2016,37(3):788-792.]
[10]Ji Yonghoon,Yamashita A,Asama Hajime.Indoor positioning system based on camera sensor network for mobile robot localization in indoor environments[J].Journal of Institute of Control,Robotics and Systems,2016,22(11):952-959.