基于双目视觉的AGV障碍物检测与避障
2018-03-19佘宏杰刘洪海赵燕伟
王 铮,赵 晓,佘宏杰,刘洪海,赵燕伟,+
(1.浙江工业大学 计算机科学与技术学院,浙江 杭州 310023; 2.浙江工业大学 特种装备制造与先进加工技术教育部重点实验室,浙江 杭州 310014)
0 引言
自动导引车(Automatic Guided Vehicle, AGV)指能够沿着磁性或光路自动引导路径行驶,并配备安全设备,具有编程调试、停车选择等多种功能的无人运输车,是物流系统中重要的自动化装置[1-2]。近年来,随着自动化水平的提高,AGV的应用范围不断扩展,被广泛地应用于军事、工业、交通等领域。
在工业应用中,AGV主要用来完成车间物料的运送。尽管布局安排会尽量保证AGV的工作路径没有障碍,但是由于车间环境比较复杂,堆放随意的物料和工人都可能影响小车的运动,需要小车本身具有快速检测障碍物、智能准确地避开障碍和停车等待的能力。完整的避障系统主要包括障碍物检测、障碍物信息计算和避障操作3部分[3]。目前障碍物检测方法主要有激光雷达检测、超声波传感器检测、红外传感器检测、机器视觉检测等[4],视觉检测通常是利用电荷耦合器件(Charge Coupled Device, CCD)相机采集外界信息,通过计算机对图像进行处理和计算,得到障碍物的运动信息,因其具有精度高、信息量大等优点,受到国内外的广泛关注[5-6]。王荣本等[7]设计了一种基于视觉导航的AGV,能够沿着视觉标识带行驶,并实现自主避障;杨福增等[8]提出一种基于立体视觉技术的障碍物检测方法,该方法稳定、可靠,识别准确率较高。从目前的情况来看,对不同状态下障碍物检测的研究尚不全面,因此本文提出一种基于双目视觉的障碍物检测技术,对车间内不同状态下障碍物进行检测,并采取相应的避障策略。
1 障碍物检测原理
1.1 障碍物检测流程
首先对摄像头进行标定[9],计算地面在左摄像头坐标系下的平面方程。障碍物检测流程如下:
步骤1通过双目摄像头采集AGV前方图像,采集周期为T。
步骤2对左右两幅图像进行畸变和极线校正,消除失真,将匹配点约束在一条直线上,减少误匹配并大大缩短匹配时间。
步骤3对左右图像进行立体匹配,获取视差图。
步骤4计算图像匹配点在左摄像头坐标系下的三维坐标,获取其高度距离与水平距离,并与设定阈值比较,判定障碍物是否存在。
步骤5无障碍时继续检测,有障碍物则减速停车,检测障碍物的运动状态,并获取参数信息。
1.2 基于深度检测的障碍物判定算法
本文利用OpenCV视觉库中的cvFindContours轮廓检测函数检测物体的轮廓,并用其外接矩形框标记,如图1所示。根据其中的白色像素点,利用双目视觉测距原理[10]计算出物体相对左摄像头坐标系下的三维坐标[11]。
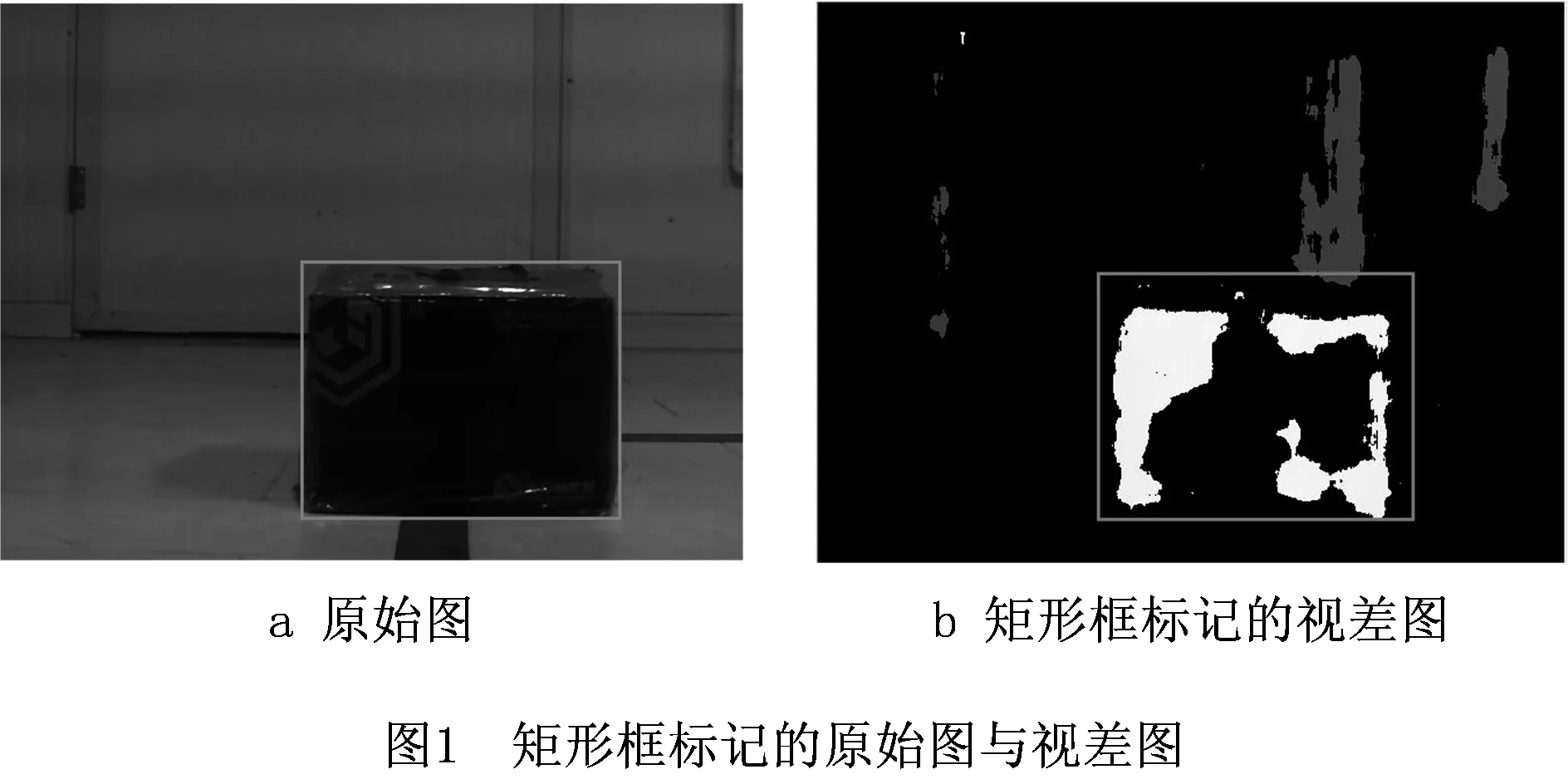
这里提出一种障碍物的判定算法:首先随机提取若干个矩形框中的白色像素点,计算其位于左摄像机坐标系下的三维坐标(x,y,z),其中x和z分别表示物体相对于左摄像头的高度距离与水平距离,然后根据设定的阈值判断是否为障碍物[12]。具体步骤如下:
步骤1随机提取视差图矩形框内若干白色像素点di(i=1,2,3,…),计算其三维坐标di(x,y,z),并按照水平距离z的大小排序。
步骤2因为提取和计算过程中存在误差,所以可能存在异常数据,计算时取z值的中位数z0,并设定阈值φ,对于满足|z-z0|>φ的像素点,将其作为异常点剔除。

1.3 基于帧差法的障碍物运动状态检测
在AGV判定前方有障碍物的情况下,根据障碍物的运动信息进一步确定障碍物的运动状态。
对于动态目标的检测,传统的检测方法有帧差法、背景差法和光流法3种[13],这3种方法都要求摄像机为静止状态。因此当AGV检测到障碍物时,应当立即停车,检测障碍物的运动状态。其中,背景差法需要预先提供场景的背景图像,当背景发生变化时需要更新背景图像;光流法计算量较大,耗时长,难以满足实时性要求;帧差法简单有效,能够适应动态变化,但对噪声比较敏感。综合以上因素,考虑到算法复杂性和系统实时性,本文采用帧差法检测动态障碍。
帧差法的原理是将相邻两帧或三帧图像数据相减后,通过预先设定的阈值过滤掉相对静止的部分来提取动态目标区域[14]。首先对相邻两帧图像进行差分运算,得到差分图像,然后对差分图像进行二值化,假设像素值变化阈值为T,如果对应像素值的变化小于T,则认为此处属于背景图像,否则属于目标图像。则有:
(1)
Di(x,y)=|fi(x,y)-fi-1(x,y)|。
(2)
式中:Di(x,y)表示差分图像;Ri(x,y)表示二值化的差分图像,黑色表示背景,白色表示运动目标。
当障碍物静止时,相邻两帧的图像没有发生变化,帧差法得到的差分图像数据接近零,二值化图像应为全黑,即Ri(x,y)=0;当障碍物运动时,根据阈值T的设定,二值化图像中的白色部分为障碍物,即Ri(x,y)≠0。
1.4 障碍物方位和速度信息获取算法
不同运动状态的障碍物需要分别获取相关的参数信息,为后续的避障提供数据支持。
对于静态障碍,除了得到深度信息外,还需要获取其宽度、相对于小车的方向及偏距等信息,以便于小车绕过该障碍;而对于动态障碍,在得到深度距离后,还需要获取其速度信息,以便于小车制定相应的避障策略[15]。
具体的算法设计步骤如下:
步骤1在深度检测过程中,得到障碍物轮廓外接矩形,可将矩形的宽度近似为障碍物的宽度,设为W,矩形的中心则近似为障碍物中心,记为O。
步骤2利用深度检测得到点的三维坐标di(x,y,z),其中y表示该点相对于左摄像头光心的偏移距离Li。
步骤3视差图中,白色点不够致密,矩形中点的像素为黑,不能直接得出其坐标信息,但是可以通过获取矩形一侧边界白色像素点的坐标,如左侧(xL,yL,zL),再根据矩形的宽度计算出障碍物中心O点的纵坐标,即O点相对于左摄像头光心的偏移量LO,
(3)
步骤4双目摄像头安装居中,两个光心距离B=70,计算障碍物中心O相对于小车中心的偏距d,
(4)
d>0表示偏右,d<0表示偏左,d=0表示居中。
(5)
2 障碍物检测实验及结果分析
本文搭建的AGV实验模型如图2和图3所示,其中:两个前轮为驱动轮,由两个伺服电机独立驱动;两个后轮为万向轮,作为从动轮。系统主要由车体、上位机、摄像头、伺服电机、电源等组成,各主要部件的规格参数如表1所示。
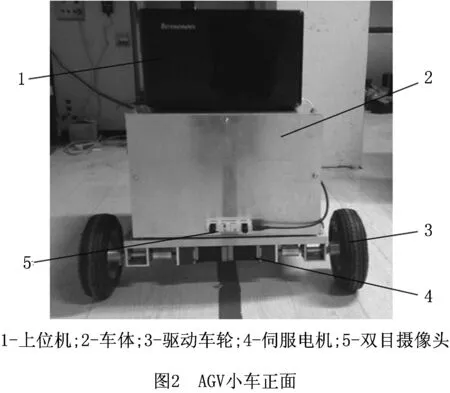
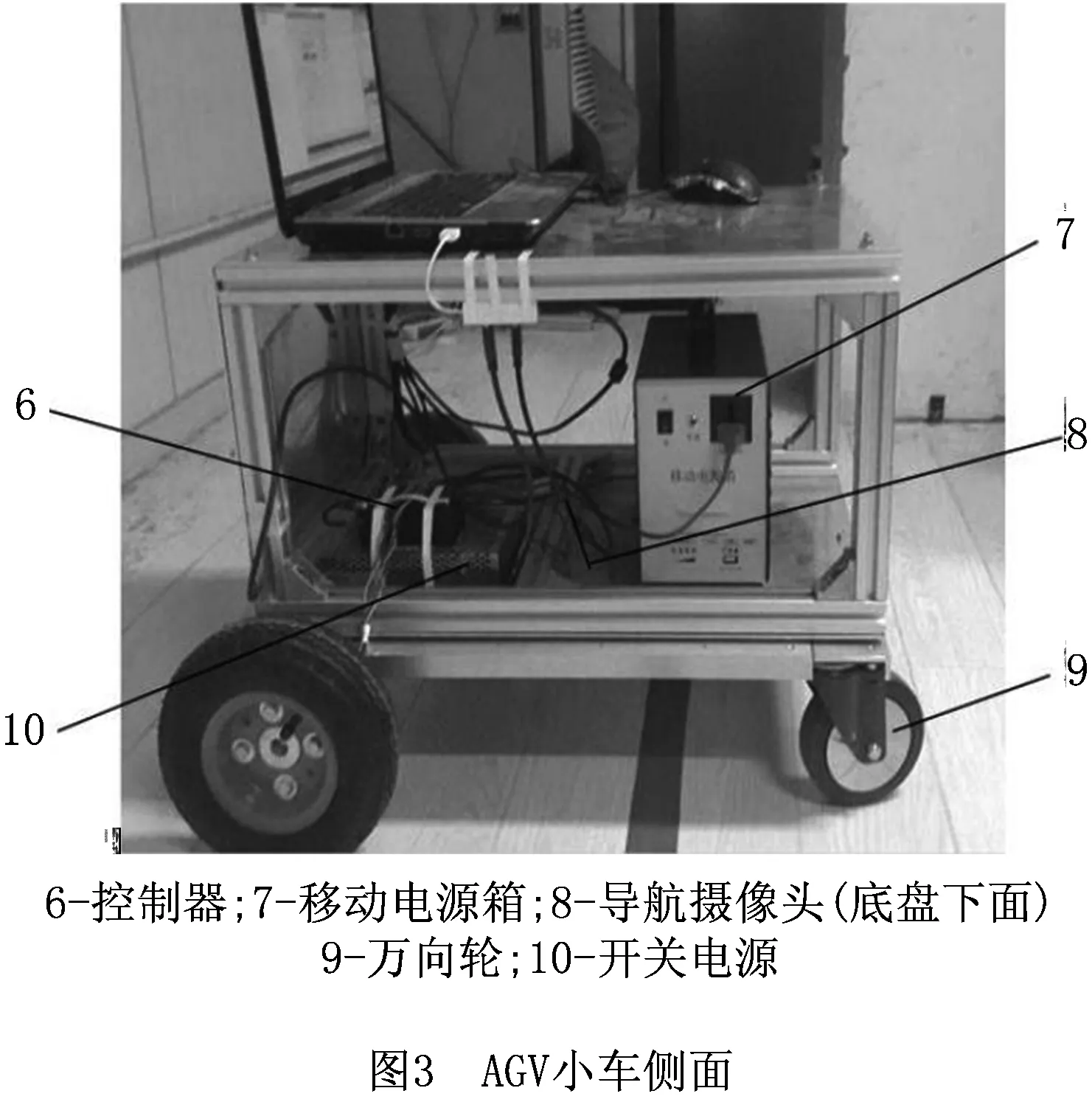
表1 AGV主要部件规格参数表
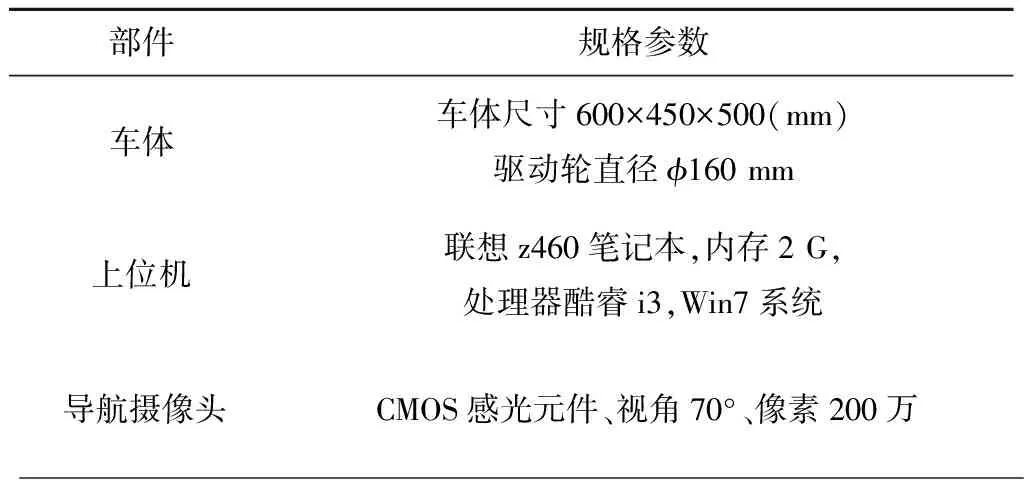
部件规格参数车体车体尺寸600×450×500(mm)驱动轮直径ϕ160mm上位机联想z460笔记本,内存2G,处理器酷睿i3,Win7系统导航摄像头CMOS感光元件、视角70°、像素200万

续表1
2.1 静态障碍物检测实验
综合考虑实际场景和双目摄像头的景深范围,设定将高于地面10 mm且距离小车1 000 mm以内的物体视为障碍物。摄像头安装于小车前部中央,图像采集的周期为250 ms,距离地面高度为200 mm,因此障碍物的高度距离阈值和水平距离阈值分别设为xd=-190 mm,zd=1 000 mm。另外,实验中用于帧差法检测的图像全部采用左摄像头采集。
2.1.1 基于深度检测的障碍物判定
图4a和图4b所示分别为左右摄像头采集到的纸箱图像(此处假定纸箱为障碍物),纸箱的实际高度为160 mm,距离摄像头光心700 mm。采集的图像经过畸变校正、极限约束和立体匹配后,取矩形框的白色像素点数为10,设异常点阈值φ=50。根据前文所述计算步骤,得到表2所示的实验数据。

表2 静态纸箱障碍检测实验数据 mm
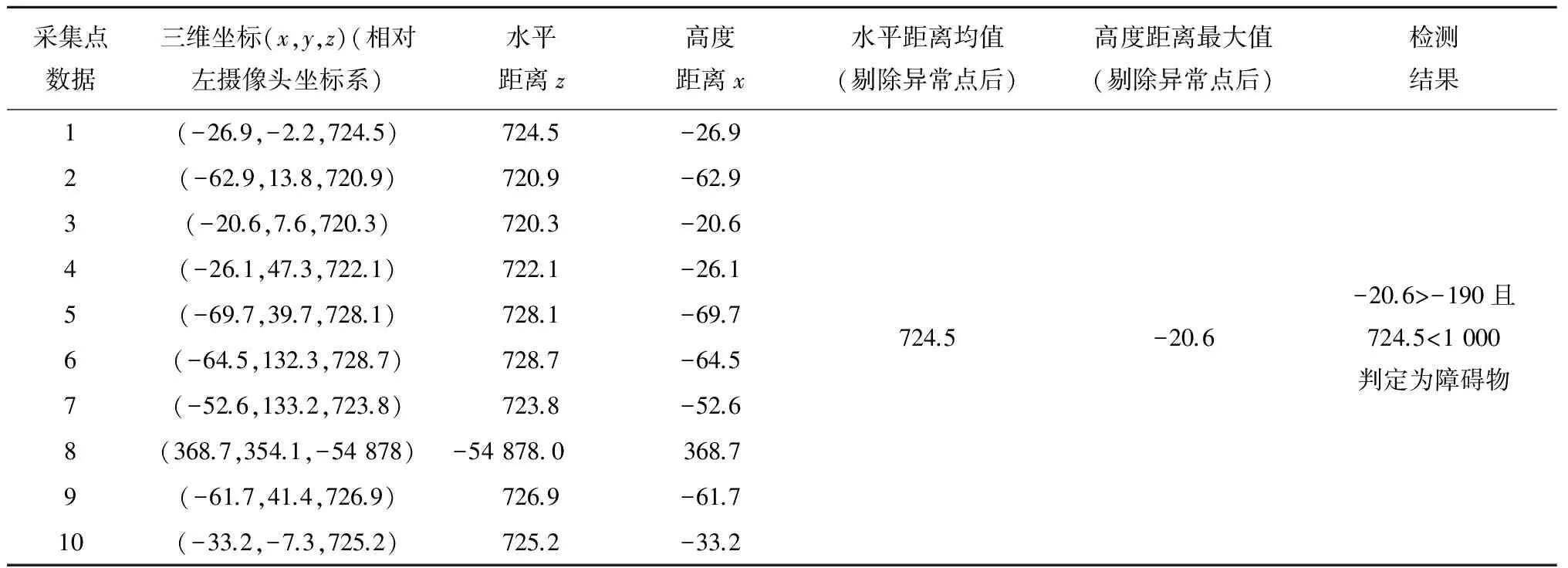
采集点数据三维坐标(x,y,z)(相对左摄像头坐标系)水平距离z高度距离x水平距离均值(剔除异常点后)高度距离最大值(剔除异常点后)检测结果1(-26.9,-2.2,724.5)724.5-26.92(-62.9,13.8,720.9)720.9-62.93(-20.6,7.6,720.3)720.3-20.64(-26.1,47.3,722.1)722.1-26.15(-69.7,39.7,728.1)728.1-69.76(-64.5,132.3,728.7)728.7-64.57(-52.6,133.2,723.8)723.8-52.68(368.7,354.1,-54878)-548780368.79(-61.7,41.4,726.9)726.9-61.710(-33.2,-7.3,725.2)725.2-33.2724.5-20.6-20.6>-190且724.5<1000判定为障碍物
从表2可以看出,在纸箱作为障碍物的情况下,通过双目视觉计算得到深度距离的误差为724.5-700=24.5 mm,误差率为3.5%,基本满足实际要求。因为提取及计算过程中存在未知错误,造成采集点8检测的坐标超出临界值,所以将该采集点作为异常点剔除。
2.1.2 基于帧差法的障碍物运动状态检测
为了提高图像处理速度,减少噪声的影响,分别对其进行灰度化与5×5窗口的中值滤波去噪的图像预处理[16-17]。图5a和图5b所示分别为预处理后的相邻两帧障碍物图像。

两帧图像相减得到差分图像,设定阈值T=30,得到二值化的差分图像为全黑,即Ri(x,y)=0,可以判定该障碍物为静止状态。
2.1.3 静态障碍物方位信息的获取
根据前文设计的障碍物方位和速度信息获取算法步骤,计算得到的障碍物方位信息如表3所示。可以看出,计算所得的障碍物方位信息与实际信息相比略有差别,考虑到摄像头的安装以及测量过程中不可避免地存在误差,对静态障碍物信息的检测,基本能够满足实际要求。
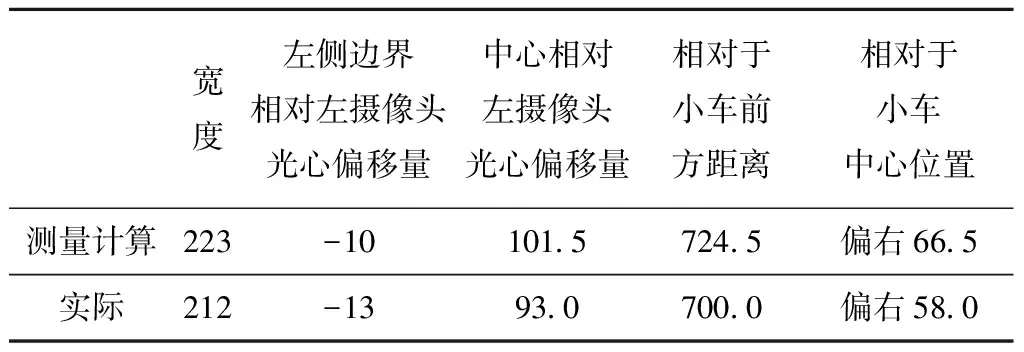
表3 静态纸箱障碍方位信息 mm
2.2 动态障碍物检测实验
2.2.1 基于深度检测的障碍物判定
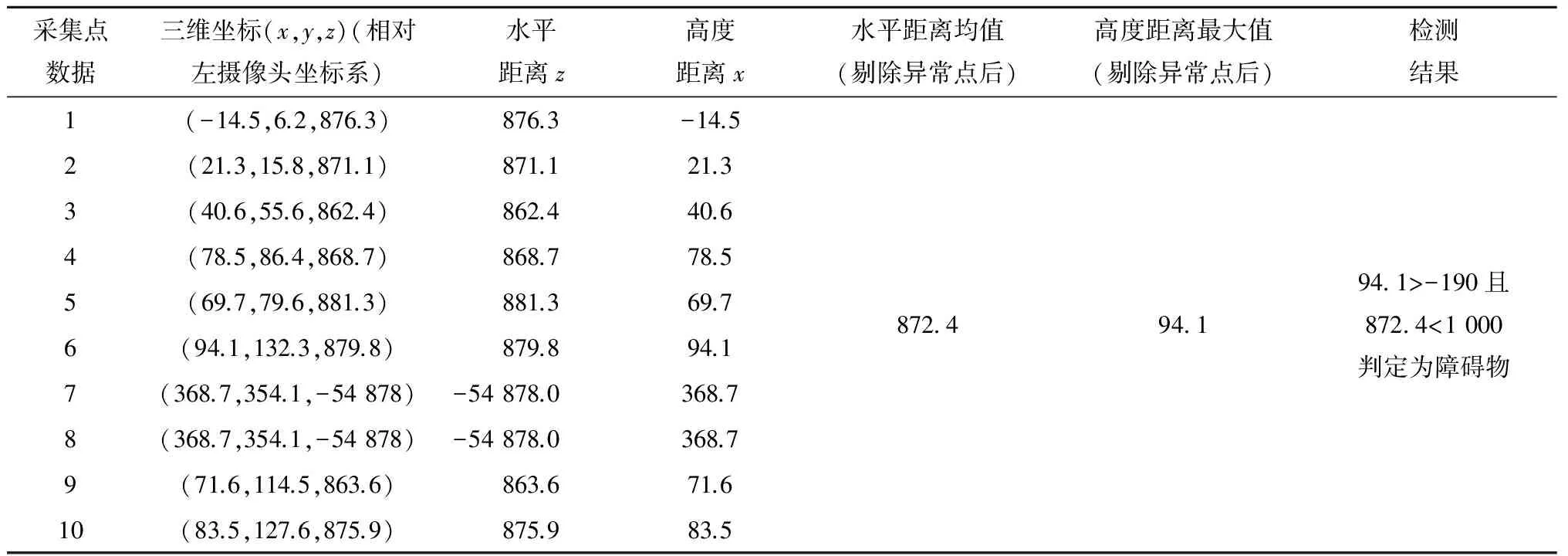
图6所示为双目摄像头采集的行人腿部图像,视野内腿的实际高度为512 mm,距离摄像头光心860 mm。同样,图像经过畸变校正、极限约束和立体匹配后,将判定算法中矩形框内的白色像素点数取为10,设异常点的阈值φ=50。根据算法步骤,得到如表4所示的实验数据。可以看出,将行人作为障碍物的情况下,双目视觉测得的深度距离为872.4 mm,误差为872.4-860=12.4 mm,误差率为1.4%,与实际值接近。检测得到采集点7和8的坐标由于超出临界值,在这里作为异常点剔除。
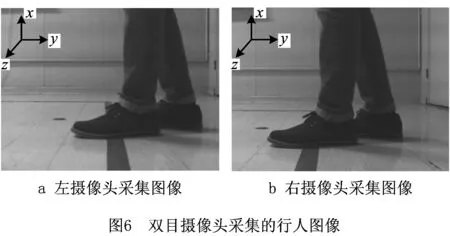
表4 行人障碍检测数据 mm
采集点数据三维坐标(x,y,z)(相对左摄像头坐标系)水平距离z高度距离x水平距离均值(剔除异常点后)高度距离最大值(剔除异常点后)检测结果1(-14.5,6.2,876.3)876.3-14.52(21.3,15.8,871.1)871.121.33(40.6,55.6,862.4)862.440.64(78.5,86.4,868.7)868.778.55(69.7,79.6,881.3)881.369.76(94.1,132.3,879.8)879.894.17(368.7,354.1,-54878)-54878.0368.78(368.7,354.1,-54878)-54878.0368.79(71.6,114.5,863.6)863.671.610(83.5,127.6,875.9)875.983.58724941941>-190且8724<1000判定为障碍物
2.2.2 基于帧差法的障碍物运动状态检测
对停车后左摄像头采集到的图像进行灰度化与5×5窗口的中值滤波去噪预处理[16-17],得到如图7所示的相邻两帧行人障碍灰度图像。

两帧图像相减得到差分图像,根据设定阈值T=30,得到二值化的差分图像,分别如图8a和图8b所示。

可以看出二值化的差分图像不为全黑,即Ri(x,y)≠0,可以判定该障碍物处于运动状态。
2.2.3 动态障碍物速度信息的获取
根据障碍物方位和速度信息获取算法步骤,得到障碍物上同一点在连续视差图中的坐标分别为d1(78.5,86.4,868.7)和d2(81.3,-12.7,871.5),计算其速度
=0.39 m/s。
由于d1和d2的x和z坐标基本没有变化,可以认为只在y方向上存在运动,即速度方向是垂直于AGV的中轴线,并且速度为正,表示障碍物相对于小车从右往左运动。
3 避障策略与路径规划
针对不同运动状态的障碍物提出简单的避障策略,描述如下:
(1)当AGV检测到物体并判定为障碍物时,应逐渐减速至停车。
(2)在停车时,通过前述算法判定障碍物的运动状态,并获取障碍物相应的参数信息。
(3)对于动态障碍,AGV继续停车等待,直到障碍物消失后按原路继续行驶。
(4)对于静态障碍,则根据障碍物尺寸、方位等参数控制AGV绕过障碍,然后回归导航路径。
避障的具体流程如图9所示。

3.1 避障路径规划模型
动态障碍的避障策略比较简单,只需停车等待,静态障碍则需要控制AGV绕过障碍物,相对比较复杂,因此主要描述静态障碍的避障过程。
(1)获取静态障碍物的尺寸和方位信息 在障碍物检测过程中,已经能够比较精确地获得静态障碍物的宽度尺寸及其相对于小车的方位信息,此处无法获得障碍的长度尺寸,假设其长度为W。
(2)控制AGV绕过障碍物并回归导航路径 本文提出的方法是:当障碍物相对于小车偏左时,为了能更快绕过障碍物,根据障碍物的位置及车间环境的不同,设置一个恒定的安全距离,小车右转角度θ并沿平行安全距离直行一段距离X,当车身中心与障碍物中心的连线与导航路径垂直时,左转角度2θ并直行距离X,使其回归导航路径。障碍物偏右和居中时同理,不再赘述。其避障过程如图10所示。
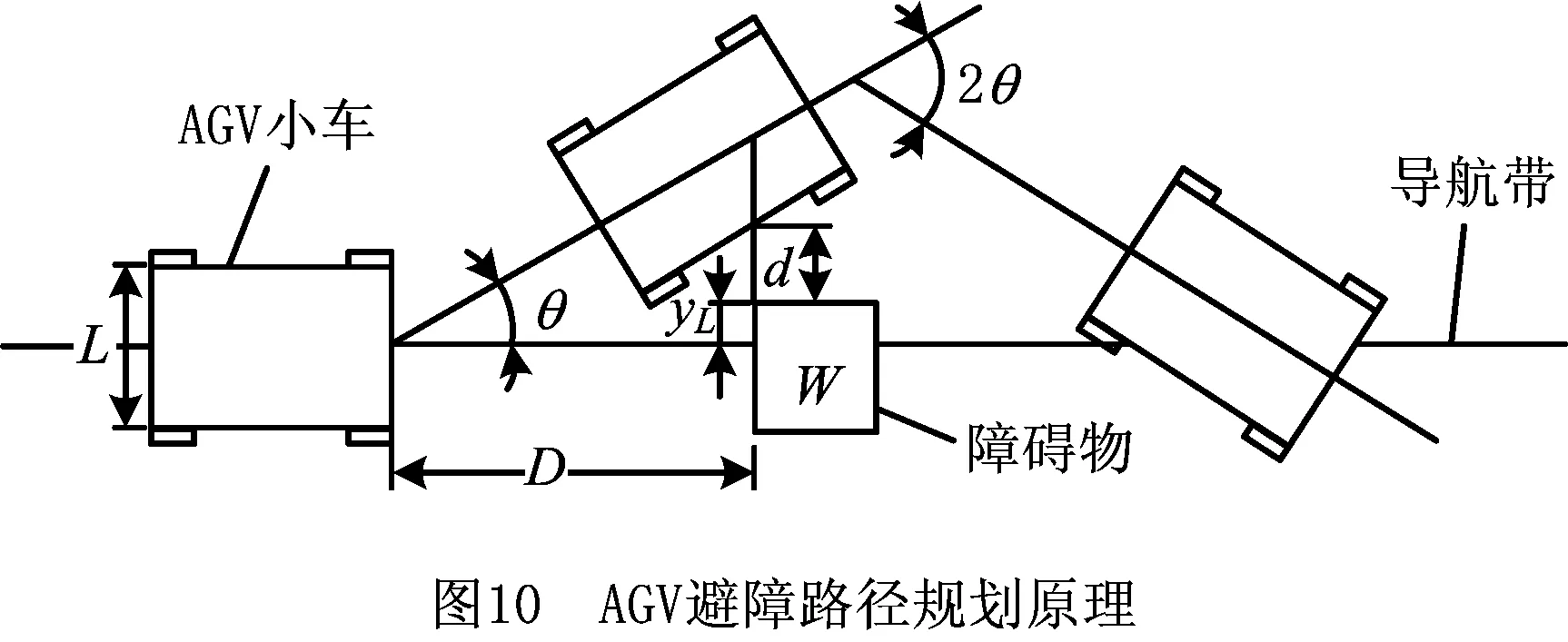
图中:L为小车的车身宽度;θ和2θ为小车的旋转角度;D为障碍物相对小车的距离;yL为障碍物左侧边界相对于小车中心的偏移距离;d为考虑存在的误差和安全问题所增加的补偿距离。对于AGV的避障过程,有
(6)
(7)
3.2 模糊PID避障路径控制
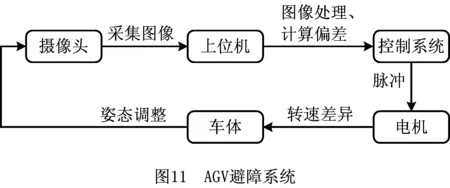
视觉AGV导航的主要任务是根据视觉系统检测到的运动偏差来控制小车行进。为了在避障时避免产生较大的偏移,本文采用一个闭环反馈系统对避障时的偏差进行控制,整个避障系统如图11所示。首先通过摄像头采集外界图像传给上位机进行图像处理,提取相关信息并计算相应偏差传给控制系统,控制系统计算得到相应的输出量,以差速的方式实现对车体的位姿调整,使AGV在较小的偏移下稳定运行。
根据上文构建小车在避障过程中实际路径与预定路径的偏差示意图,如图12所示。可以看出,偏差主要包括路径中心线与小车中点的距离偏差u及中心线与小车中轴线的角度偏差ε。
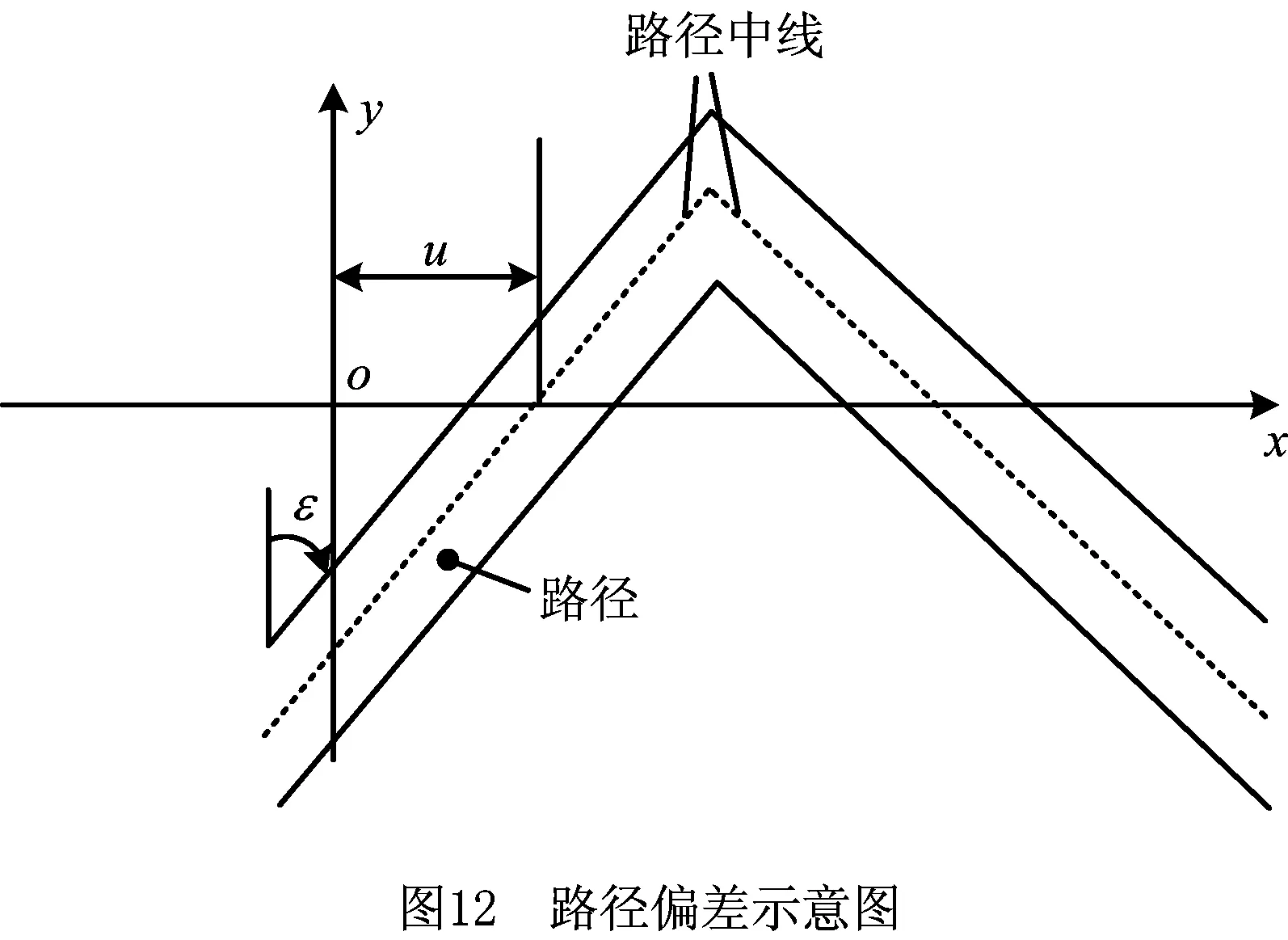
以图像中点为坐标原点,水平向右为x轴正方向,竖直向上为y轴正方向,建立直线坐标方程
y=kx+b。
(8)
其中距离偏差u和角度偏差ε分别表示为:
(9)
(10)
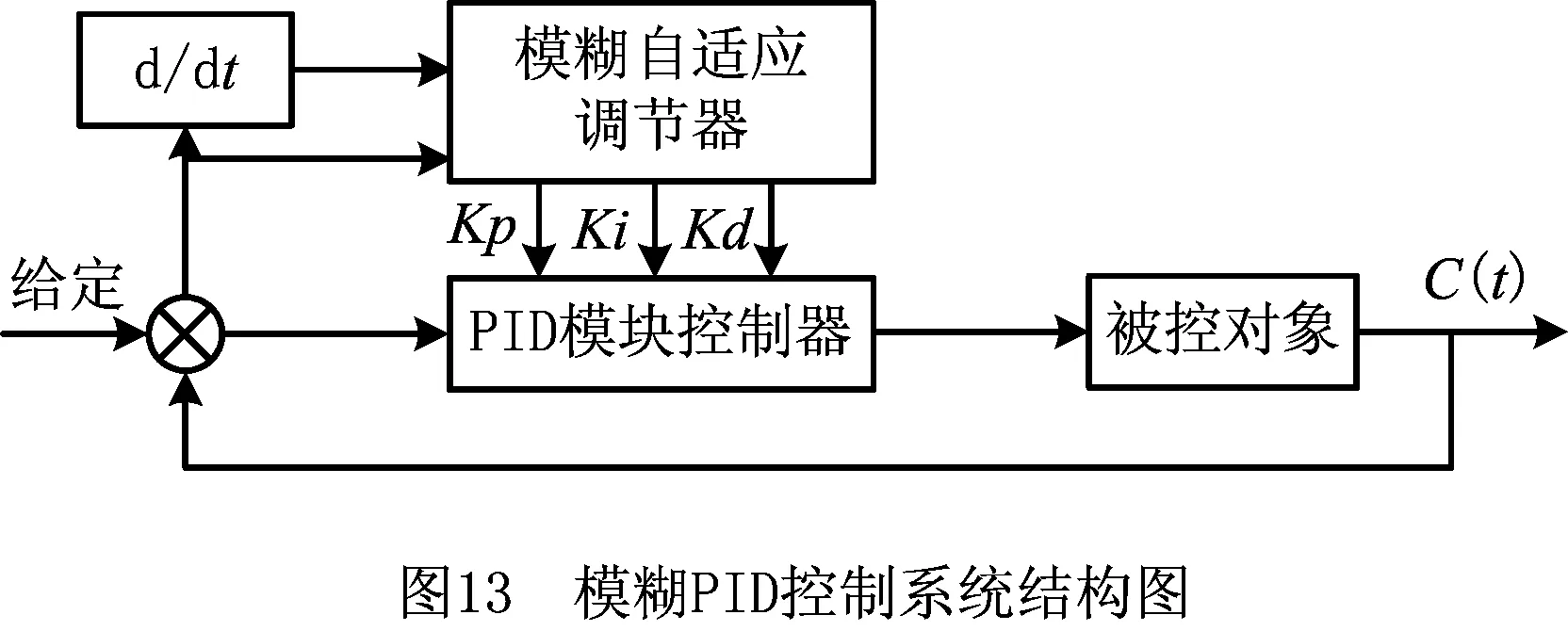
本文结合传统比例—积分—微分(Proportional-Integral-Derivative, PID)控制与模糊控制的优点,采用模糊PID控制方法对AGV小车避障时的路径进行控制。模糊PID控制是一种利用模糊控制方法实时调节数字PID控制系统中各控制参数的智能控制系统,本文采用的模糊PID控制器由模糊推理和常规的数字增量型PID共同组成。
图13所示为模糊PID控制器的结构原理图,系统输入为误差e和误差变化量ec,并找到PID的3个控制参数与e及ec之间的模糊关系,在运行时不断检测e和ec,采用基于模糊控制规则对PID控制参数进行在线修改,满足不同时刻误差e和误差变化量ec对PID参数的不同要求,从而使被控对象具有较好的动、静态性能。
由AGV的运动学模型易知,角度偏差是距离偏差产生的主要原因,而且角度偏差越大,距离偏差就越大。为了体现这种差异,添加一个权重系数p,将这两个偏差融合,得到一个总偏差E,
E=pe+(1-p)ε。
(11)
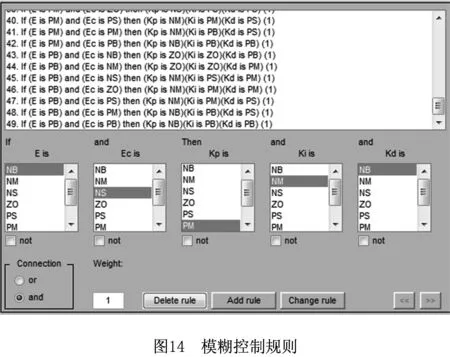
本文将总偏差E和总偏差变化率Ec作为模糊PID控制器的输入量, PID控制器3个参数的变化量 ,ΔKP,ΔKI和ΔKD作为输出量。将3个参数的变化量分别与原始参数相加,得到较为准确的参数,再将该参数传递给数字增量型PID控制器,经过计算得到左右轮电机的转速差Δn。根据车速设定约束,相应地给左轮或右轮电机一个转速变化量Δn,从而使小车能够实时调整自身的位姿,将偏差控制在一个较小的范围。图14所示为利用MATLAB的模糊控制工具箱(Fuzzy toolBox)写入的49条模糊控制规则。
3.3 实验验证
借助实验室场地模拟车间,铺设导航带,在有障碍物的路径上进行对比实验。先后采用传统PID控制方法和模糊PID控制方法控制AGV小车运动,分析两种情况下小车的距离偏差和角度偏差,从而验证避障策略的有效性。AGV小车及导航带如图15所示。

调整好AGV小车的初始位置,使其初始距离偏差为-30 mm,角度偏差为3°,分别进行PID和模糊PID控制实验,采样周期为1 s,采集前10 s的数据变化如图16和图17所示。其中u为AGV实际路径与预定路径的距离偏差,ε为角度偏差。
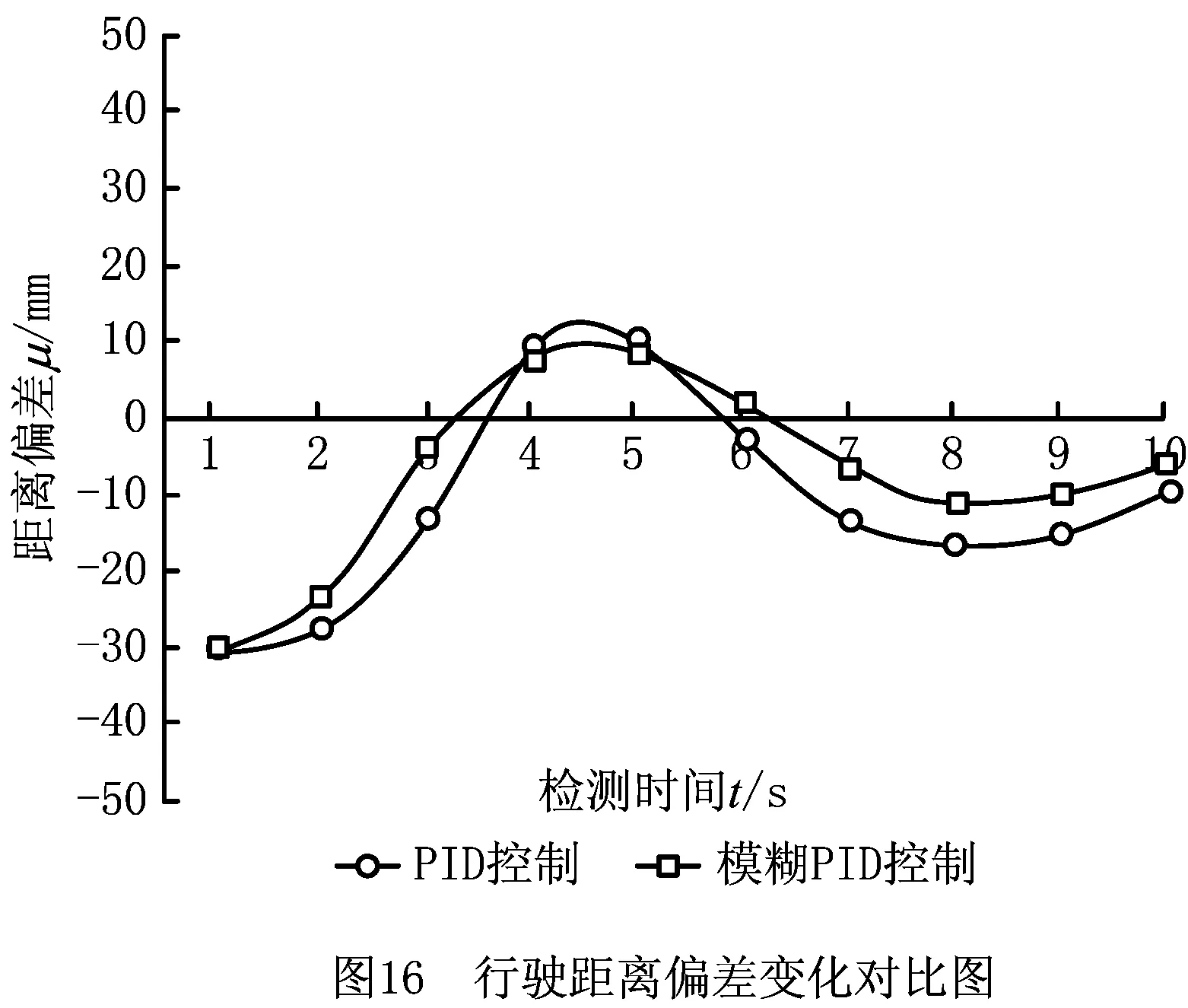
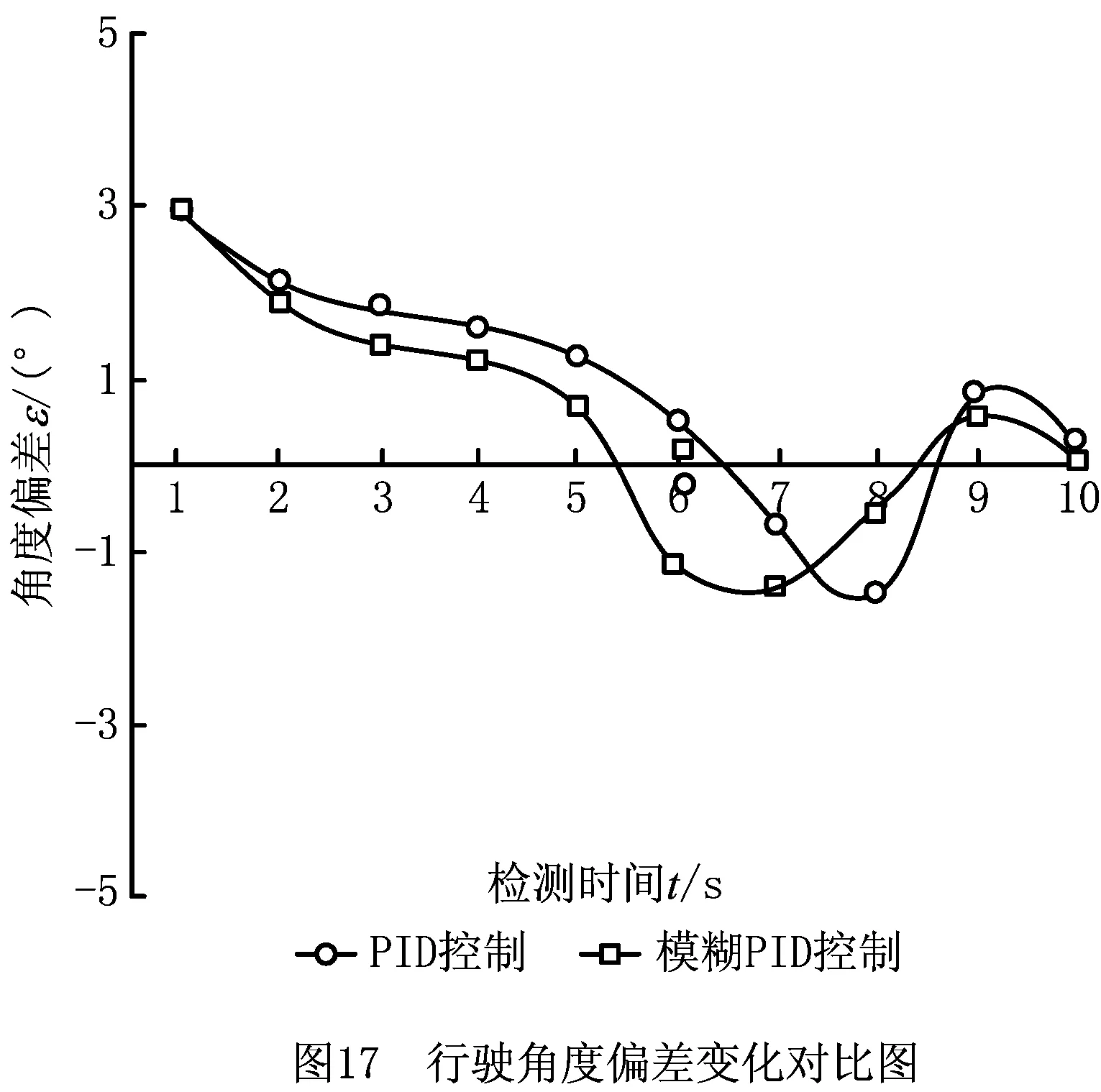
从曲线图中可以看出,在初始偏差相同的情况下,无论是对距离偏差还是角度偏差的控制,模糊PID控制相比传统PID控制方法都具有较快的响应速度和较小的超调量,AGV的运行均更加高效和平稳。
4 视觉处理与检测功能软件的开发
本文AGV的应用背景为视觉导引的车间环境下的物料搬运,针对该背景,需要设计相应的符合要求的上位机软件,实现AGV对导航带的图像处理和标识符识别,控制AGV小车的运动位姿,以及对障碍物的识别检测等功能。
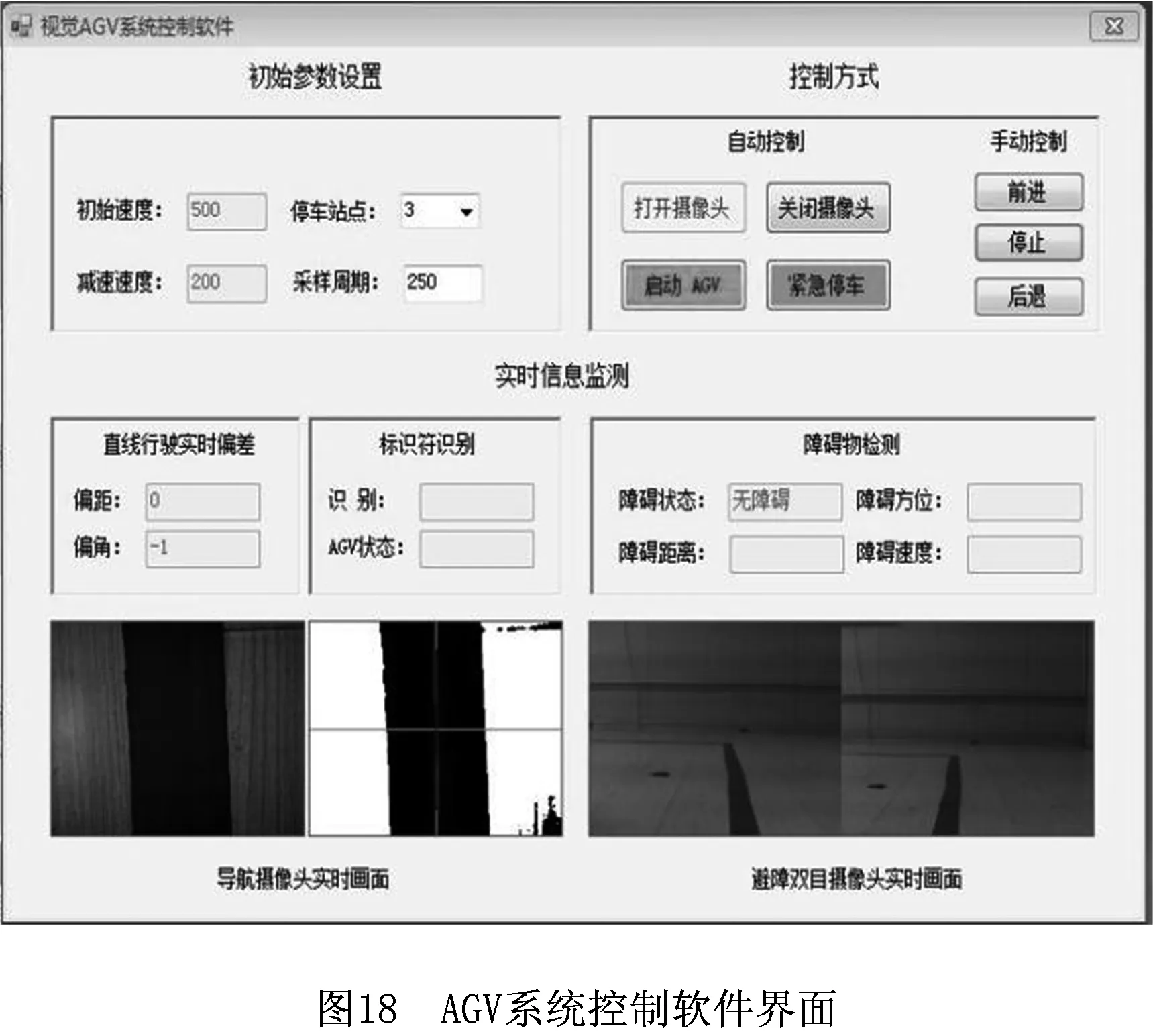
在运行过程中,上位机软件实时检测AGV的运行状态信息,包括直线行驶数据和障碍物的检测。直线行驶时需要计算小车中心与导航带中心线的实时偏差,包括偏距和偏角;当检测到障碍物时,能够根据图像信息计算障碍物的相关信息。
上位机软件的系统界面如图18所示。
4.1 摄像头控制与图像采集
EmguCV中提供了相应的类,即Capture类[18],调用Capture类即可实现对多个摄像头的控制。
打开摄像头并调整好分辨率后,设置一定的时间间隔周期采集图像,然后对采集到的图像进行处理。在图像采集过程中调用C#工具箱中的timer控件,将timer控件拖入程序设计窗口,设定时间周期,在代码中启动该控件,然后利用QueryFrame()函数读取摄像头的当前帧,将其保存在设定变量中,并显示在程序界面,便实现了周期性采集图像的功能。控制双目避障摄像头采集的图像如图19所示。

4.2 障碍物的视觉检测功能的实现
本文采用基于双目视觉的障碍物检测,通过安装在车体前面的双目摄像头,周期性地采集路面前方的图像,并对图像进行处理和计算,分析图像中是否存在障碍物,然后计算得出障碍物的运动状态和方位速度等信息。
按照前文提出的障碍物检测流程与运动参数检测算法,分别在无障碍、静态障碍和动态障碍的情况下进行实验,得到3种状态下的检测结果,分别如图20a~图20c所示。通过对比计算可知,检测得到的障碍物参数与实际参数相差不大,静态障碍误差率小于3.5%,动态障碍误差率小于2.0%,基本能够满足实际要求。

5 结束语
本文提出一种基于深度检测的障碍物判定算法,该算法可以根据距离阈值判定是否存在障碍物,如果存在障碍物,则继续检测障碍物的运动状态。针对不同状态下的障碍物,本文提出一种方法分别获取其方位和速度信息,然后在障碍物静止和运动状态下分别进行实验验证,并对实验结果进行了分析和对比。实验表明,本文所提算法是可行的。另外,本文还提出一种简单的避障策略,分别采用传统PID和模糊PID控制方法控制AGV前进,通过分析两种控制方法下存在的距离和角度偏差,验证了避障策略的有效性。最后设计出一种简单高效的上位机软件,实现了对障碍物的检测以及AGV运动的控制。
[1] WU Xing, LOU Peihuang, TANG Dunbing.Integrated motion control of path tracking and servo control for an automated guided vehicle[J].Journal of Mechanical Engineering,2011,47(3):43-48(in Chinese).[武 星,楼佩煌,唐敦兵.自动导引车路径跟踪和伺服控制的混合运动控制[J].机械工程学报,2011,47(3):43-48.]
[2] MARTINEZBARBERA H, HERREROPEREZ D. Development of a flexible AGV for flexible manufacturing systems[J]. Industrial Robot:the International Journal of Robotics Research and Application,2013,37(5):459-468.
[3] WANG Rongben, CHU Jiangwei, FENG Yan, et al. A practical design of AGV visual navigation[J]. Chinese Journal of Mechanical Engineering,2002,38(11):135-138(in Chinese).[王荣本,储江伟,冯 炎,等.一种视觉导航的实用型AGV设计[J].机械工程学报,2002,38(11):135-138.]
[4] XIAO Haining, LOU Peihuang.Collision avoidance and cycle-deadlock control method for automated guided vehicle system[J]. Computer Integrated Manufacturing Systems,2015,21(5):1244-1252(in Chinese).[肖海宁,楼佩煌.自动导引车系统避碰及环路死锁控制方法[J].计算机集成制造系统,2015,21(5):1244-1252.]
[5] WANG Mengdi, HAN Baoling, LUO Qingsheng. Binocular visual navigation and obstacle avoidance of mobile robots based on speeded-up robust features[J]. Computer Aided Drafting,Design and Manufacturing,2013,23(4):18-24.
[6] ZHUANG Xiaolin, ZHANG Tiemin. Design and experiment of obstacle avoidance of binocular vision recognition system[J]. Journal of Agricultural Engineering,2015,31(S2):24-30(in Chinese).[庄晓霖,张铁民.小车避障双目视觉识别系统的研发[J].农业工程学报,2015,31(S2):24-30.]
[7] WANG Rongben, CHU Jiangwei, FENG Yan, et al. Design for a new type of AGV based on machine vision[J]. Chinese Journal of Mechanical Engineering,2002,38(11):135-138(in Chinese).[王荣本,储江伟,冯 炎,等.一种视觉导航的实用型AGV设计[J].机械工程学报,2002,38(11):135-138.]
[8] YANG Fuzeng, LIU Shan, CHEN Liping, et al. Detection method of various obstacles in farmland based on stereovision technology[J]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(5):168-172,202(in Chinese).[杨福增,刘 珊,陈丽萍,等.基于立体视觉技术的多种农田障碍物检测方法[J].农业机械学报,2012,43(5):168-172,202.]
[9] YANG Jinghao, LIU Wei, LIU Yang, et al. Calibration of binocular vision measurement system[J]. Optics and Precision Engineering,2016,24(2):300-308(in Chinese).[杨景豪,刘 巍,刘 阳,等.双目立体视觉测量系统的标定[J].光学精密工程,2016,24(2):300-308.]
[10] SHEN Tong, LIU Wenbo,WANG Jing.Distance measurement system based on binocular stereo vision[J].Electronic Measurement Technology,2015,38(4):52-54(in Chinese).[沈 彤,刘文波,王 京.基于双目立体视觉的目标测距系统[J].电子测量技术,2015,38(4):52-54.]
[11] ZHU Kun, YANG Tangwen, RUAN Qiuqi, et al. Real-time tracking and measuring of moving objects based OR binocular vision[J].Robot,2009(4):327-334(in Chinese).[祝 琨,杨唐文,阮秋琦,等.基于双目视觉的运动物体实时跟踪与测距[J].机器人,2009(4):327-334.]
[12] AHSAN M, IQBAL A. Using image processing for design of an autonomous ground vehicle[J]. International Journal of Computer Applications,2014,85(10):33-37.
[13] LI Gang, QIU Shangbin.New moving target detection method based on background differencing and coterminous frames differencing[J]. Journal of Instrumentation,2006,27(8):961-964(in Chinese).[李 刚,邱尚斌.基于背景差法和帧间差法的运动目标检测方法[J].仪器仪表学报,2006,27(8):961-964.]
[14] SGORBISSA A, ZACCARIA R. Planning and obstacle avoidance in mobile robotics[J]. Robotics and Autonomous Systems,2012,60(4):628-638.
[15] CHEN Tianding. Fast computing scheme for AGV obstacle distance measure and road recognition[J]. Advanced Materials Research,2010,108/109/110/111:500-506.
[16] XU Linfeng, TIAN Zhixiang. Design for AGV based on binocular stereo vision[J]. Advanced Materials Research,2011,271/272/273:137-143.
[17] JAMDAGNI P P, PATRA K. Obstacle avoidance for mobile robot navigation in unknown environment using geometrical information of mobile camera images[J]. International Journal of Computational Vision and Robotics,2014,4(1/2):39-54.
[18] CHEN Shengyong, LIU Sheng. Implementation of computer vision technology based on OpenCV[M]. Beijing:Science Press,2008:390-399(in Chinese).[陈胜勇,刘 盛.基于OpenCV的计算机视觉技术实现[M].北京:科学出版社,2008:390-399.]