基于混联机构的新型物流分拣机器人机构研究
2018-03-19曹中浩刘剑刘俊辰李希文张辉曹毅
曹中浩,刘剑,刘俊辰,李希文,张辉,曹毅
(江南大学 机械工程学院 江苏 无锡 214122)
0 引言
随着物流分拣技术要求愈来愈高,传统的物流分拣机器人渐渐不能满足现代分拣工作需求,设计研发具有新型物流分拣功能的机器人将成为发展方向[1-2]。其核心内容就是分拣机器人机构本身的设计。
目前,机器人机构主要有串联机构、并联机构和混联机构三大类。其中,串联机器人工作空间大,结构简单,但不适用于要求高速度、高准确度的工作环境。并联机构在应用上弥补了串联机构的不足,但由于并联机构工作空间小,不能广泛应用。混联机构可避免串、并联机构的缺点,同时又能综合它们各自的优点,具有实用意义[3]。刘辛军[4]提出了五轴联动混联铣床的机构设计方法及应用并通过理论研究及应用试验促进了少自由度并联机构的应用发展。夏红梅[5]提出一种由1R2P串联机构和球面2自由度冗余驱动并联机构串联组成的混联构型方案用于菠萝采摘。高峰[6]将混联机构应用于四足机器人的构型设计,为四足混联腿机构机器人的后续研究奠定理论基础。沈惠平[7]针对大型扁平型立方体工件的喷涂工艺特点,设计了一种控制解耦性很好的五轴混联喷涂机器人。相关的混联机构还包括其他构型设计及应用[8-13]。
随着我国物流产业的迅速发展,研发具有自主知识产权的低成本物流分拣机器人产品己成为我国机器人领域亟待解决的问题。本项目致力于设计和研发基于混联机构的新型物流分拣机器人机构,兼具并联机器人和串联机器人机构的优点。针对快递等行业物流分拣实现自动化、高效率的研发需求,研制出具有创新型的分拣机器人机构,可降低工人的劳动强度,提高效率。该项目侧重于基于混联机构的物流分拣机器人结构设计,对相关混联机构的研究具有参考意义。
1 结构设计与分析
所设计的基于混联机构的新型物流分拣机器人机构构型如图1所示,该混联机构由三自由度的并联机构(3T)和二自由度的串联机构(2R)组成,其末端运动输出为三移动两转动。机械手为螺纹连接,可拆卸,替换不同规格的机械手,适用于多种类物品的分拣。滚珠丝杠用于自锁,防止装置因重力作用导致下滑。倾斜杆14可绕水平杆13滑动,使机械手沿x轴方向运动;斜杆12可带动机械手沿y轴方向运动;x,y轴方向杆件均可沿螺纹杆9上下运动,即带动机械手沿z轴方向运动;连接副将轴承与横杆7以下部分相连接,使机械手绕轴承转动,即绕y轴转动;同时,整个装置悬挂在固定圆杆3上,可绕固定圆杆转动,带动机械手绕x轴方向转动,即三移两转运动。

1—底板;2—支架;3—固定圆杆; 4—竖杆;5—滚动轴承;6—转动杆;7—横杆;8—连接副;9—螺纹杆;10—方杆;11—滚珠丝杠;12—斜杆;13—水平杆;14—倾斜杆;15—机械手图1 混联机构构型图
2 自由度分析
为进行自由度约束分析,对该机构进行简化,其空间机构简图如图2所示。

图2 混联机构空间机构图
由于该装置的空间结构具有对称性,故其空间自由度的计算仅以右半部分为例即可。该机构中,固定杆件为x轴方向横杆,套筒A可以在固定圆杆上绕x轴转动,具有5个约束;套筒A与B通过滚动轴承相连,使得套筒B可绕y轴方向转动,具有5个约束,套筒C可以沿z轴方向移动,具有5个约束;套筒D可以沿y轴方向运动,具有5个约束;滑块E沿杆在x轴方向运动,具有5个约束。
空间机构的自由度=所有活动构件自由度-所有运动副引入的约束数,其公式为:
F=6N-5P5-4P4-3P3-2P2-P1-K
其中:N为 活动构件的个数,P5为具有5个约束的构件个数,P4为具有4个约束的构件个数,P3,P2,P1分别为具有3,2,1个约束的构件个数,K为虚约束的个数。其中机构的组成部件个数为5,即N=5。
具有5个约束数的机构为5,即P5=5;其余约束数的机构为0,即P4=P3=P2=P1=0。
所以,该混联机构的自由度为:
F=6N-5P5-4P4-3P3-2P2-P1-K=
6×5-5×5-4×0-3×0-2×0-1×0-0=5
可以证得,该混联机构具有五自由度,三移动两转动。
3 空间运动分析
该混联机构可实现空间的三移两转运动(图3),对其进行动力学仿真,使用UG仿真软件,在机构的可运动构件上添加驱动,其余部分相对固定,分别得到机械手沿x,y,z轴移动和绕x,y轴转动的位移、速度、加速度曲线。

图3 混联机构三维模型
该装置整体尺寸分别设计为:长为150cm,宽为120cm,高为150cm。
假设所分拣的物品长L=6cm,宽d=5cm,高h=8cm,质量m=0.5kg。
1) 机械手沿x方向移动,得出5s内移动80cm的位移、速度、加速度曲线如图4所示。

图4 沿x方向位移、速度、加速度曲线
2) 沿y轴方向移动,得出5s内移动80cm的位移、速度、加速度曲线如图5所示。
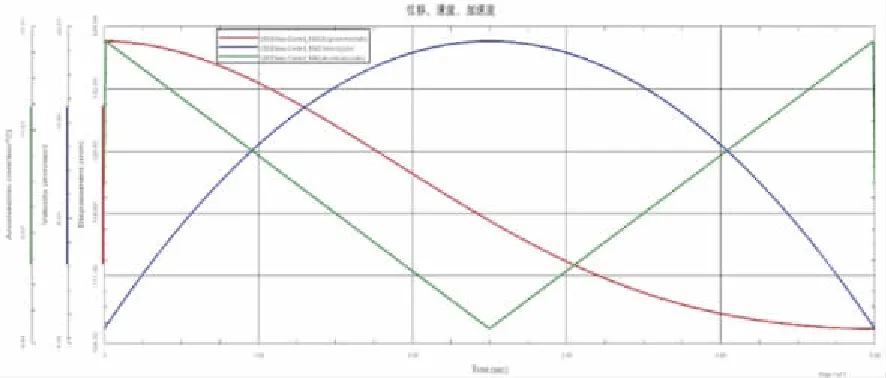
图5 沿y方向位移、速度、加速度曲线
3) 沿z轴方向移动,得出5s内移动80cm的位移、速度、加速度曲线如图6所示。

图6 沿z方向位移、速度、加速度曲线
4) 绕x轴转动,得出5s内转动90°的角位移、角速度、角加速度曲线如图7所示。

图7 绕x轴90°的角位移、角速度、角加速度
5) 绕y轴转动,得出5s内转动50°的角位移、角速度、角加速度曲线如图8所示。

图8 绕y轴50°的角位移、角速度、角加速度
通过仿真,再次验证该机构的输出为三移动两转动。
4 结语
为解决现有分拣机构精度不足效率较低等问题,提出了具有五自由度的混联机构,以物流分拣为载体,将该装置应用于物流行业,提高工作效率,降低工人劳动强度,具有实用意义和实际价值 。同时,本项目基于目前物流分拣机器人机构的研究现状提出了明确的研究目标和具体的研究内容,为混联机器人应用于人们的生产生活奠定了基础,具有广阔的应用前景。
[1] 王成林, 李琛, 贾美慧,等. 基于机器人的分拣系统设计研究[J]. 物流技术(装备版), 2013(5):81-85.
[2] 李瑞峰, 郭万金, 曹雏清. 新型五自由度混联机器人及其动力学分析[J]. 华中科技大学学报(自然科学版),2015(S1):32-36.
[3] 沈惠平,赵海彬,邓嘉鸣,等. 基于自由度分配和方位特征集的混联机器人机型设计方法及应用[J]. 机械工程学报, 2011, 47(23):56-64.
[4] 谢福贵, 汪劲松. 高灵活度五轴联动混联铣床的机构设计方法及应用[J]. 机械工程学报, 2014(4):24-24.
[5] 夏红梅, 王红军, 甄文斌. 菠萝采摘混联机构的设计与运动学分析[J]. 机械科学与技术, 2013, 30(9):32-36.
[6] 田兴华, 高峰, 陈先宝,等. 四足仿生机器人混联腿构型设计及比较[J]. 机械工程学报, 2013, 49(6):81-88.
[7] 李菊, 赵德安, 沈惠平,等. 多喷枪协同式喷涂五轴混联机器人设计[J]. 农业机械学报, 2012, 43(4):216-220.
[8] 曾达幸,胡志涛,侯雨雷,等. 基于螺旋理论的两转一移解耦并联机构型综合[J]. 燕山大学学报, 2014(1):22-28.
[9] 李秦川, 柴馨雪, 陈巧红, 等. 2-UPR-SPR并联机构转轴分析[J]. 机械工程学报, 2013, 21(21):62-69.
[10] H. T. Liu, T. Huang, D. G. Chetwynd, M. Li, S. J. Hu. Kinematic design of a 5-DoF hybrid robot with large workspace/limb-stroke ratio[J]. Journal of Mechanical Design, 2007, 129(5):530-537.
[11] H. K. Jung, C. D. Crane, R. G. Roberts. Stiffness mapping of compliant parallel mechanisms in a serial arrangement[J]. Mechanism & Machine Theory, 2008, 43(3):271-284.
[12] 叶伟,方跃法,郭盛,等. 基于运动限定机构的可重构并联机构设计[J]. 机械工程学报, 2015(13):137-143.
[13] H. P. Shen, T. L. Yang, L. Z. Ma. Synthesis and structure analysis of kinematic structures of 6-DoF parallel robotic mechanisms [J]. Mechanism and Machine Theory, 2005, 40(10): 1164-1180.
