现代有轨电车槽型轨道除污装置设计研究
2018-03-19刘红现柯坚王国志邓斌
刘红现,柯坚,王国志,邓斌
(西南交通大学 机械工程学院,四川 成都 610031)
0 引言
由于现代有轨电车在国内的普及,使得对槽型轨的清洁研究工作正在兴起。姜超设计了一种公铁两用的有轨电车工程清洗车,其对轨道槽的清洗采用的是高压水射流技术[2];高慧莹等人设计了一种铲除机构,可以铲除普通轨道面上的干痂和异物[3];Yuxin Huang等人设计了类似的装置,实现了对轨道面和道床的全面清扫,不仅延长了轨道和车轮的寿命,也更有力地保障了行车安全[4]。在这些研究中,均没有针对现代有轨电车槽型轨道内具体污物的清理研究。
直接采用高压水射流技术清洁槽型轨会使大量污物滞留在轨道槽内,因此需要先对槽型轨道进行清扫。有些污物与轨道粘附性较强,为了提高清扫效果,本文根据槽型轨道内污物的特点,设计了一种轨道槽污物松动机构,该机构依托于以铁路平车为载体的槽型轨道清扫车上,作为轨道清扫装置的一部分,随着铁路平车运动。在综合考虑了槽型轨的特殊结构对污物形成影响的基础上,该装置利用扭转弹簧使机构紧贴轨道槽,增强除污效果,同时遇到固定硬颗粒时,可使其能向上转动,有一定的避障能力。通过虚拟样机技术,利用虚拟样机软件ADAMS,针对机构在槽型轨道内3种不同的运动情况,分析系统的相关性能指标,设置不同的扭转弹簧刚度进行仿真分析,优化扭转弹簧参数,强化装置对污物的松动效果,为槽型轨道的清洁提供一定的依据。
1 槽型轨除污装置
1.1 槽型轨除污装置组成
槽型轨清洁装置,作为附设装置挂配在轨道车辆下部随行清扫槽型轨道,主要由支架和置于支座上的污物松动机构和滚刷机构构成;支架通过支座挂配在轨道车辆上;污物松动机构通过连接板联接在支架上;滚刷机构与支架相联;支架上设置有负压空气吸尘装置,依轨道车辆前进的方向,污物松动机构、滚刷机构和负压空气吸尘装置依次设置,如图1所示。
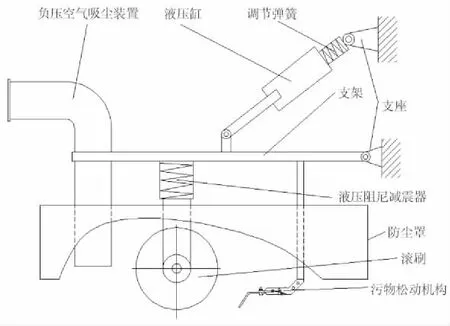
图1 槽型轨除污装置
1.2 槽型轨除污装置工作原理
在该装置中,随着轨道车辆的运行,污物松动机构松动轨道槽内污物,滚刷装置利用离心力将轨道槽内污物扫起,被扫起的污物落在负压空气吸尘装置吸力作用范围内,污物在最短时间内被吸走,减少了扬尘,从而达到清洁槽型轨的目的。污物松动机构在整个清洁装置中起着重要的作用,其污物松动的能力直接影响着槽型轨清洁的效果。
2 污物松动机构设计
2.1 污物松动机构的功能要求
该机构是整个槽型轨除污装置的一部分,污物松动机构主要用于清扫前期松动轨道槽内污物,方便滚刷清扫,最后由负压空气吸尘装置将污物吸入垃圾箱,其功能要求主要有:
1) 机构的齿形耙耙齿应与轨道槽内部紧贴,并且与轨道槽的作用力大小适中,避免对轨道造成划伤等损害,减少耙齿磨损加剧。
2) 在齿形耙对污物松动的过程中,耙齿会有磨损,因此设计时应考虑磨损的补偿。
3) 在对轨道槽内的污物进行松动时,遇到固定硬颗粒,齿形耙应该有一定的避障能力。
4) 设计结构应方便更换耙齿。
2.2 污物松动机构模型设计
采用SolidWorks建立三维模型,虚拟样机软件ADAMS仿真的方法。虚拟样机(virtual prototype)技术已经广泛地应用于设计和制造领域,其中ADAMS应用较为普遍,早在对传统机构的设计中,已经应用了该技术。
污物松动机构模型如图2(a)所示,整个机构由连接件、轴、耙齿连接杆、扭转弹簧和耙齿构成,连接件和轴的两边分别焊有2个螺钉,轴用于连接连接件和耙齿连接杆,使两者能相对转动,耙齿连接杆和耙齿通过螺栓相连,耙齿尖端恰好与轨道槽底部相配合。2个扭转弹簧套在轴的两端,扭转弹簧的两端固定在螺钉上,通过扭转弹簧可以使耙齿贴紧轨道槽,既能补偿耙齿磨损,又能在遇到固定硬颗粒时,能向上翻转一定的角度,越过较硬颗粒,防止损坏耙齿,起到避障的作用。
2.3 仿真基本工况
轨道清洁车辆运行速度36km/h,污物松动机构的运动平行于轨道槽中心线,材料为普通碳钢。轨道槽内颗粒污染物主要有粘附性颗粒和固定硬颗粒,在不同扭转弹簧刚度下,污物松动机构对2种不同污染物的松动效果进行仿真,从而确定最佳的扭转弹簧刚度。
2.4 模型初步分析
根据机构的运动特点,进行力学分析,当机构在无污物的轨道槽内运动时,污物松动机构在轨道槽中心面受力情况如图2(b)所示。图中:Fx和Fy分别为轴对动作件在x和y方向的作用力,G为动作件的重力,F0为槽型轨对动作件的支撑力,f为摩擦力,S为动作件的质心点C到轴中心点O的距离,L为耙齿尖端的垂直面到轴中心点O的距离,M为2个扭转弹簧对动作件的转矩M0之和。
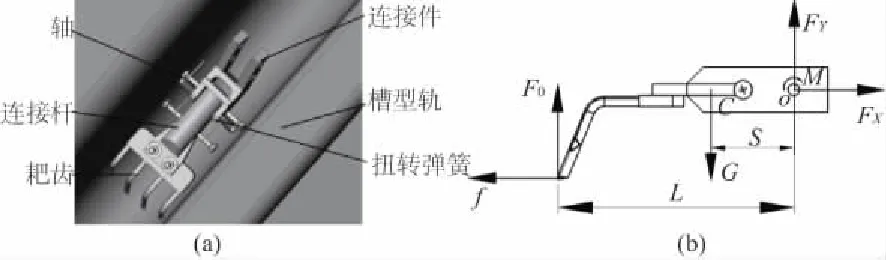
图2 污物松动机构组成和力学模型
由力学分析可以得到刚体的力平衡方程和力矩平衡方程,即:
(1)
解方程组可得:
M=GS+F0L=ρVgS+F0L
(2)
式中:ρ——刚体密度,刚体为普通碳钢,ρ=7.801×10-6kg/mm3;V——刚体体积,通过SolidWorks质量评估V=1 894.00mm3;a——质心到轴中心的距离,a=12.25mm。
分析可知,当槽型轨与动作件之间的作用力为0时,即两者间没有碰撞,F0=0时,动作件运动最为平稳,代入可得:
G=ρgV=144.89N
(3)
M0≤M/2=ρVga/2=887.48N·mm
(4)
根据扭转弹簧的设计,设置的安装转矩和最终得到的工作转矩应该<887.48N·mm,然后通过对不同刚度下扭转弹簧的仿真,分析动作件的运动状态。
3 动力学仿真和分析
3.1 模型简化与设置
为了节省仿真时间,首先简化模型,然后导入ADAMS中,采用Boolean运算合并部件,并对合并后的各部件重命名,如将耙齿和耙齿连接杆合并,命名为动作件,如图3所示。

图3 简化模型的初始设置
在ADAMS中导入简化的模型,设置初始条件。设置重力沿-y方向为-9 806.65kgmm/s2,设置各零件的材料均为普通碳钢,动作件和轴、连接件和轴之间设置为旋转副,连接件和槽型轨之间设置为移动副,方向与槽型轨面平行,槽型轨固定在大地上。在耙齿与轨道槽之间设置接触,接触类型为固体-固体,设置摩擦力,动摩擦系数设置为0.1,静摩擦系数设置为0.3。各构件间的约束关系如表1所示。另外建立2个扭转弹簧,令其力的作用点分别为A、B两点,然后设置其安装转矩为300 N·mm,工作扭转变形角为20°,设置其刚度为变量,依次取合适的值,进行动力学仿真,得到不同的转矩,以此分析机构的运动状态。设置机构相对于轨道槽的运动速度为1 000mm/s。

表1 各构件之间的约束关系
3.2 仿真和结果分析
分析机构在轨道槽内的运动状况,存在三种运动情况。第一种是理想情况A,即轨道槽内没有污物,第二种情况B,轨道槽内存在粘附性颗粒,第三种情况C,轨道槽内存在固定硬颗粒。建立对应的物理模型和数学模型,进行仿真分析。
1) 运动情况A—轨道槽内无污物时运动学仿真和分析
机构在无污物的轨道槽内工作,设置仿真时间为2s,仿真步数为300步,设置扭转弹簧刚度如表2,运动情况A,进行仿真。观察动作件质心点在竖直方向上的位移变化情况,因为仿真次数较多,只列出与结果相近的3次仿真数据,如图4所示,可以看出,当弹簧刚度为k=3Nmm/(°)时,动作件达到平衡的时间最短,运动最平稳,此时弹簧的工作转矩为Mmax=360.157Nmm,如图7所示。

表2 三种运动情况仿真中扭转弹簧刚度的设置

图4 运动情况A下扭转弹簧刚度k的影响
2) 运动情况B—轨道槽内存在粘附性颗粒时运动学仿真和分析
在轨道槽内建立几个与轨道槽紧贴的物块,代替污物,物块与轨道槽,物块与物块,物块与耙齿之间分别建立接触力,如图3所示。
设置仿真时间为2s,仿真步数为300步,设置扭转弹簧的刚度如表2,运动情况B,进行仿真,观察各个物块沿轨道槽z轴方向的速度变化情况和动作件沿y轴的位移变化情况。由于数据较多,取其中2个污物A和B的3组与结果相近的数据进行分析,污物A质心沿z轴方向速度变化如图5。可以看出当扭转弹簧刚度k=8Nmm/(°)时,污物A和B的速度变化最大,运动时间最长,说明此时污物A和B受到耙齿的作用最为强烈,污物松动效果最好,此时工作转矩为Mmax=504.051Nmm,如图7所示。

图5 不同弹簧刚度k作用下污物A速度变化
3) 运动情况C—轨道槽内存在固定硬颗粒时运动学仿真和分析
在轨道槽内建立一物块代替固定硬颗粒,在耙齿与轨道槽、耙齿与物块之间建立接触力。设置仿真时间为0.2s,仿真步数为300步,设置扭转弹簧刚度如表2,运动情况C,由于数据较多,取与结果相近的3组数据进行分析。依次比较各图动作件质心点运动的情况,如图6所示,可以测量出动作件在0.055 5s遇到固定硬颗粒,当弹簧刚度k=9Nmm/(°)时,动作件最先达到稳定,此时为0.672s,最大工作转矩为Mmax=584.220Nmm,如图7所示。

图6 不同扭转弹簧刚度k作用下对动作件的影响
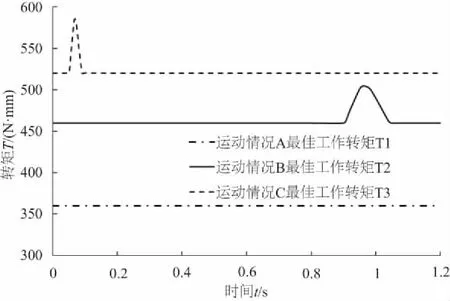
图7 三种运动情况下扭转弹簧最佳工作转矩
以上分析了3种运动情况,并得到了扭转弹簧的3个最大工作转矩,为了使其能满足各种情况下的工作需求,可知当扭转弹簧刚度k=9Nmm/(°),安装转矩M0=300Nmm,安装变形角φ=20°,机构的工作效果最好。此时最大工作转矩Mmax=584.220Nmm<887.48N·mm,满足要求。根据扭转弹簧设计要求,查询机械设计手册,即可设计出符合工作要求的扭转弹簧。
4 结语
1) 采用ADAMS与SolidWorks软件相结合,快速有效建立仿真模型,对污物松动机构进行仿真,实时获得各个部件的位移、速度和扭转弹簧工作转矩的曲线,使整个仿真过程可视化,提高了工作效率,节约时间和成本。
2) 分析机构的3种运动情况,对不同刚度的扭转弹簧进行运动学仿真。运动情况A,确定出最佳扭转弹簧刚度k=3Nmm/(°),该状态下机构运动最平稳,对应最大工作转矩Mmax=360.157Nmm;运动情况B,确定出最佳扭转弹簧刚度k=8Nmm/(°),该状态下污物的松动效果最佳,对应最大工作转矩Mmax=504.051Nmm;运动情况C,确定出最佳扭转弹簧刚度k=9Nmm/(°),该状态下运动最先恢复稳定,对应最大工作转矩Mmax=584.220Nmm。
3) 运动情况C时弹簧工作转矩最大,此时扭转弹簧刚度k=9Nmm/(°),安装转矩M0=300Nmm,安装变形角φ=20°,以此作为机构扭转弹簧设计和安装的依据,使用该方法得到的扭转弹簧,能够有效松动槽型轨内粘附性污物。
[1] 杲晓峰,刘威伟,张天白,等. 现代有轨电车国内目标城市地区适应性及市场拓展策略[J]. 世界轨道交通,2015(3):46-48.
[2] 姜超. 现代有轨电车工程槽型轨道清洗车设计[J]. 轨道交通装备与技术,2015(2):1-3.
[3] 高慧莹, 王彤宇, 林琳,等. 基于ADAMS的铲除机构的动力学仿真分析[J]. 长春理工大学学报(自然科学版),2012(1):93-95.
[4] Yuxin Huang, Tongyu Wang, Lin Lin, Huiying Gao, Yanwen Zheng, Ying Xu. The Design and Three-dimensional Modeling of Special Cleaning-and-Maintaining Vehicles for Tracks[J]. IEEE International Conference on Mechatronics and Automation, Chengdu, China, 2012(8):1214-1219.
[5] 袁安富, 相立峰. 基于ADAMS和SolidWorks的印刷机凸轮传动系统的建模与仿真[J]. 制造业自动化, 2010(12):125-128.
[6] 林琳,王彤宇,黄郁馨,等. 轨道专用清理维护车设计与三维建模[J]. 机械设计,2014(9):89-92.
[7] 王宏伟, 谢传军, 朱文杰,等. 沈阳市浑南新区现代有轨电车工程特点[J]. 都市快轨交通, 2013, 26(5):10-14.
[8] 李秋义, 李阳春. 大连市现代有轨电车轨道结构技术方案初探[J]. 中国铁路, 2000(3):41-42.
[9] Sinokrot T, Nakhaeinejad M, Shabana A A. A Velocity Transformation Method For The Nonlinear Dynamic Simulation Of Railroad Vehicle Systems[J]. Nonlinear Dynamics, 2008, 51(1/2):289-307.
