基于PID参数自整定的河工模型尾门控制
2018-03-16唐立模吴严君
陈 红, 嵇 阳, 唐立模, 吴严君
(1. 河海大学 水利水电学院, 江苏 南京 210098; 2. 河海大学 理学院, 江苏 南京 210098)
河工模型试验中尾门控制用于调节模型边界流态与原型流态的相似,是开展模型试验的必备过程。非恒定流试验中需要实时调整尾门确保边界水位过程与天然相似。然而,人工尾门调节方式难以满足水位控制精度及连续性试验要求,因而,逐渐发展了尾门的自动控制系统。杨铁笙等[1-3]运用微机控制技术开发了河工模型尾门控制系统,虞邦义等[4]研发了差动式尾门控制系统,实现了对尾门的自动控制。水位变化比较复杂时,常规尾门控制系统控制精度难以满足规范要求。大量研究者引入PID等控制模型提高尾门控制系统的响应速度及控制精度。蔡辉等[5-6]根据水位变化特点,利用PID优化控制过程,提高了尾门水位控制系统的动态特性;李俊敏[7]运用伺服电机和推拉式尾门,采用PID 调节算法,结合拉格朗日插值方法,实现了尾门水位的自动控制。杜剑锋等[8]采用分时PID控制,试验初始阶段停止PID控制,模型水位接近目标水位后再自动转入 PID 控制,解决了长江防洪模型目标水位降幅较大时尾门超调难题;然而,该控制方法针对特定模型,通用性能差。李晓飚等[9]运用模糊控制改进了水工模型尾门控制器,通过模糊控制器判断水位偏差分别选取比例或比例积分控制,提高了水位控制精度。
上述应用表明,PID控制模型有利于提高尾门控制精度,但难以解决水位速涨速落等复杂控制中超调或滞调等难题。虽然PID控制是最经典的反馈控制模型,具有很好的适应性和鲁棒性,但其控制效果与参数设置密切相关。常规尾门控制系统在试验过程中PID参数保持不变,降低了尾门控制系统的适应性,无法满足规范要求。自动控制领域内,通过模式识别判别控制偏差,实时整定PID参数,其控制效果明显更优[10-13]。因此,本文根据非恒定流试验过程中目标水位、水位跟踪偏差、水位预期变化趋势等特征,实时整定PID参数,提高控制系统动态响应特性,实现水位速涨速落等复杂情况的精确控制。
1 尾门控制系统设计

图1 尾门控制系统结构Fig.1 Structure of the tailgate control system
常用尾门型式有翻板门和推拉门,推拉门存在止水困难、出流不稳、易受杂物阻挡等缺点,而翻板门具有动作灵活、出流稳定等优点。因此,选取翻板门作为尾门控制系统水位调节装置。系统主要包括水位仪、翻板门、电机、控制器和计算机(如图1所示),计算机设定控制器参数,调节电机转速和方向,驱动翻板门变化,实现尾门水位的控制。
水位仪实时测量水位H1(t),与目标水位H0(t)对比,得到水位偏差eH(t):
eH(t)=H1(t)-H0(t)
(1)
水位偏差大于设定阈值,电机动作,重复迭代完成目标水位跟踪控制。电机转速PID控制模型为:
(2)
kp,TI,TD分别为比例、积分、微分系数,e(t)为转速偏差,通过改变kp,TI,TD数值,控制电机运动速度和方向。kp较大提高电机转速,使翻板门快速动作加快水位调节,但过大kp易导致尾门水位出现超调和滞后。TI可消除系统累计偏差,促进系统逼近目标输出。TD根据偏差变化趋势产生超前控制,具有预见性。
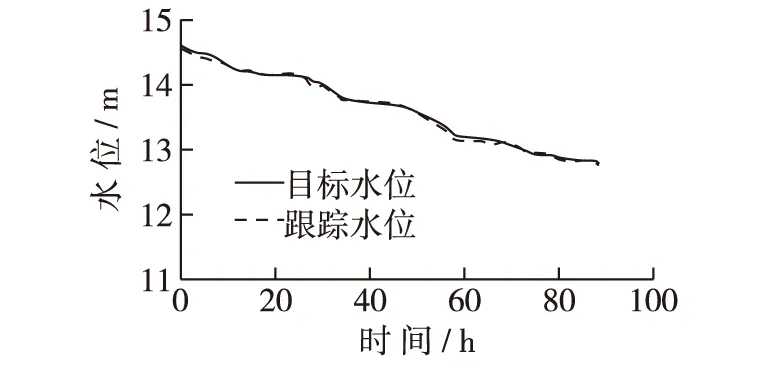
图2 水位跟踪过程Fig.2 Water level tracking process
2 PID参数整定
2.1 固定PID参数试验
PID参数主要通过理论计算、经验凑试或试验确定,实际中难以用数学模型或传递函数准确描述时,多采用经验凑试或试验确定,遵循“先比例、再积分、后微分”原则。以平原河流河工模型为例,控制目标水位变化较平缓(图2),尾门控制选用PI控制模型,经验凑试kp为1.3,TI为3 s,尾门水位控制效果如图2所示,最大跟踪误差小于1 mm。
山区河流洪水过程中水位速涨速落,图3是某山区河流洪水过程水位监测曲线,其中从45.5至53.5 h,8 h内水位涨幅达2.55 m。
固定PID参数,尾门水位控制出现较大偏差(如图4所示),增大kp,尾门水位出现超调;反之,又出现滞后。固定参数模式下,水位跟踪最大偏差达到1.3 mm,超出了规范要求。
其中,UAV的移动策略矩阵Q=(Qj,l)为0-1稀疏矩阵,当UAV存在从t时刻最优布署坐标运动到t+1时刻最优布署坐标的策略时,其元素值为1,否则为0.联合运动能耗矩阵

图3 山区河流水位变化过程Fig.3 Hydrograph of water level changing in mountain rivers

图4 常规PID参数整定跟踪过程Fig.4 Process of tracking PID parameters self-tuning conventionally
2.2 PID自整定
PID参数应与水位跟踪偏差、水位涨落速度、涨落预期以及跟踪相位等特征密切相关,根据实际控制经验运用产生式表示法总结尾门水位控制知识,形成专家知识库。产生式知识表示法是1943年E.Post根据串替规则提出的一种计算模型,其中每一条规则称为一个产生式。产生式用于表示因果关系知识,其基本形式为:IF a THEN b。a为前提,b为结论。
水位调节过程中,需要以水位跟踪偏差、水位涨落速度、涨落预期以及跟踪相位作为条件,调节电机动作。主要知识可表示为:
知识1,IF 模型水位涨速大于原型水位涨速,THEN减小kp;
知识2,IF模型水位涨速小于原型水位涨速,THEN增大kp;
知识3,IF 模型水位涨速等于原型水位涨速,THENkp不变;
知识4,IF模型水位降速大于原型水位涨速,THEN减小kp;
知识5,IF模型水位降速小于原型水位涨速,THEN增大kp;
知识7,IF模型水位预期上涨幅度超过原型水位,THEN减小TI;
知识8,IF模型水位预期上涨幅度小于原型水位,THEN增大TI;
知识9,IF模型水位预期上涨幅度等于原型水位,THENTI不变;
知识10,IF模型水位跟踪相位滞后,THEN增大TD;
知识11,IF模型水位跟踪相位超前,THEN减小TD;
知识12,IF模型水位跟踪相位相等,THENTD不变。
尾门控制中,实时监测水位涨落速度、涨落趋势以及目标相位,对比知识库,做出相应调节。实时水位Hs(t)与目标水位Hm(t)的偏差ΔH(t):
ΔH(t)=Hs(t)-Hm(t)
(3)

H′(t)=Hs(t)-Hs(t-1)
(4)
Hm(t)=Hm(t)-Hm(t-1)
(5)
按照当前PID参数进行控制,水位理论上升时间为tHm,实际已上升时间为ts,则水位还将上升时间Δt为:
Δt=tHm-ts
(6)
设迭代因子σ:σ=ΔtH′(t)/ΔH(t)
(7)
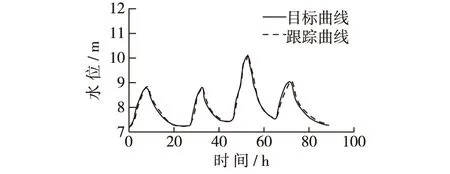
图5 专家系统PID参数整定跟踪过程Fig.5 Process of tracking PID parameters by self-tuning with expert system

3 结 语
尾门自动控制对于非恒定流试验顺利开展至关重要,虽然PID控制器能够优化尾门控制性能,但仍然难以满足水位速涨速落等复杂条件下水位跟踪控制需求。为提高复杂条件下翻板门控制精度,以山区河流洪水过程为例。首先,运用固定PID参数模式实施了尾门控制,试验结果为水位控制最大偏差达到1.3 mm,超出了规范要求。然后,运用产生式学习法总结尾门控制系统PID参数调节规则,构建以水位跟踪偏差、水位涨落速度、涨落预期以及跟踪相位为关键要素的知识库,确立了12条控制策略,尾门控制时根据实测数据与知识库规则自主选择对应控制策略,实现PID参数的自整定。PID参数自整定大幅降低了水位控制偏差,同样山区河流水位控制,水位跟踪最大偏差仅为0.5 mm,尾门控制精度大幅提高。
本文仅讨论了单一尾门控制情况,多个尾门控制存在水位调整滞后,PID参数自整定方法及实施方案还有待改进完善。同时,非恒定流控制包括上边界流量控制,试验效果还需要考虑上边界流量控制精度。
[1] 杨铁笙, 安凤玲, 詹秀玲. 模型尾门水位控制方法研究[J]. 泥沙研究, 1993(1): 21-29. (YANG Tiesheng, AN Fengling,ZHAN Xiuling. On the method for control of tailgate water level of a hydraulic model[J]. Journal of Sediment Research, 1993(1): 21-29. (in Chinese))
[2] 王昕, 蔡守允, 张河. 河工模型试验计算机测控系统[J]. 水利水电技术, 2003, 34(5): 57-59. (WANG Xin, CAI Shouyun, ZHANG He. Computer control and measurement system for hydraulic model test[J]. Water Resources and Hydropower Engineering, 2003, 34(5): 57-59. (in Chinese))
[3] 贺昌海, 雷川华, 周小平, 等. 模型试验流量与水位自动控制系统研制[J]. 长江科学院院报, 2007, 24(3): 72-74. (HE Changhai, LEI Chuanhua, ZHOU Xiaoping, et al. Research and development of automatic control system of discharge and water-level in model-testing[J]. Journal of Yangtze River Scientific Research Institute, 2007, 24(3): 72-74. (in Chinese))
[4] 虞邦义, 马浩, 俞国青. 差动式尾水调节系统数学模型[J]. 泥沙研究, 2005(1): 21-25. (YU Bangyi, MA Hao, YU Guoqing. Mathematic model for difference-type tail-water measuring and controlling system[J]. Journal of Sediment Research, 2005(1): 21-25. (in Chinese))
[5] 蔡辉, 马洪蛟, 孙典红, 等. 水工模型水位的自动控制优化算法[J]. 河海大学学报(自然科学版) , 2002, 30(5): 95-97. (CAI Hui, MA Hongjiao, SUN Dianhong, et al. Optimized algorithm for automatic control of water level in hydraulic model experiments[J]. Journal of Hohai University(Natural Sciences), 2002, 30(5): 95-97. (in Chinese))
[6] 苏杭丽, 马洪蛟, 张东生, 等. 复合模型系统的控制策略[J]. 海洋工程, 2002, 20(2): 96-99. (SU Hangli, MA Hongjiao, ZHANG Dongsheng, et al. Control strategies of hybrid model system[J]. The Ocean Engineering, 2002, 20(2): 96-99. (in Chinese))
[7] 李俊敏. 河工模型尾门水位控制系统的设计与研究[J]. 长江科学院院报, 2016, 33(5): 135-138. (LI Junmin. Design and research of tail gate control system for river model experiment[J]. Journal of Yangtze River Scientific Research Institute, 2016, 33(5): 135-138. (in Chinese))
[8] 杜剑锋, 马志敏, 范北林. 河工模型试验目标水位突降时尾门水位的控制[J]. 长江科学院院报, 2016, 33(4): 131-134. (DU Jianfeng, MA Zhimin, FAN Beilin. A method of controlling water level at tail gate when target water level drops sharply in river model experiment[J]. Journal of Yangtze River Scientific Research Institute, 2016, 33(4): 131-134. (in Chinese))
[9] 李晓飚, 赵国昌, 汪拥赤. P-FUZZY-PI控制器在水工模型水位控制系统中的应用[J]. 计算机测量与控制, 2005, 13(4): 341-343. (LI Xiaobiao, ZHAO Guochang, WANG Yongchi. Application of P-FUZZY-PI controller in water level control system of hydraulic model experiments[J]. Computer Measurement and Control, 2005, 13(4): 341-343. (in Chinese))
[10] HANG C C, ASTROM K J, HO W K. Refinements of the Ziegler-Nichols tuning formula[J]. Control Theory and Applications, 1991, 140: 143-162.
[11] 孟祥泉. PID参数自整定方法研究与控制器研制[D]. 大连: 大连理工大学, 2010. (MENG Xiangquan. Research on the methods of PID parameters self-tuning and development of the controller[D]. Dalian: Dalian University of Technology, 2010. (in Chinese))
[12] HE S Z, TAN S H, XU F L, et al. Fuzzy self-tuning of PID controllers[J]. Fuzzy Sets and Systems, 1993, 56(1): 37-46.
[13] 张永浩. 模糊PID自整定控制器的仿真研究[J]. 航海工程, 2005(5): 1-4. (ZHANG Yonghao. The simulation study of PID-controllers with fuzzy self-adjusting parameter[J]. Ship and Ocean Engineering, 2005(5): 1-4. (in Chinese))
