基于四旋翼无人机的桥梁裂缝检测系统设计
2018-03-16彭雪村卢志芳
徐 昊, 彭雪村, 卢志芳
(1. 武汉理工大学 土木工程与建筑学院, 湖北 武汉 430070; 2. 武汉理工大学 道路桥梁与结构工程湖北省重点实验室, 湖北 武汉 430070)
裂缝是危害桥梁结构安全的重要病害,对裂缝几何形态尤其是宽度的测量是桥梁检测的重要内容。传统的检测方法主要基于人工视觉检测,需要搭建脚手架、挂篮或者使用专门的桥梁检测车,耗费的人力物力较大,检测效率较低,同时会妨碍交通运营,而检测效果往往依赖于检测人员的经验丰富程度。对于大型桥梁,传统检测方法常常需要将检测人员送到某些危险的位置,存在较大安全隐患[1]。无人机技术的出现提供了消除上述传统检测方式弊端的新方案。利用远程控制或自动飞行的无人机进行桥梁检测,具有成本低、灵活性高的优势[2],可以有效提高桥梁检测的水平。
文献[3-4]分别基于视觉伺服方法和模糊控制方法研究了无人机在桥梁检测中的控制策略;文献[5-6]研究了无人机在桥梁等大型工程结构检测中的应用,分析了影响视觉检测质量的因素;文献[7]分析了无人机桥梁检测的安全隐患,并提出了应对策略;文献[8]设计了基于旋翼无人机的桥梁裂缝快速扫描及识别算法;文献[9]将三维重建技术与无人机技术结合,实现了结构检测中损伤位置的精确定位;文献[10]通过框选平均值法,利用裂缝的面积除以计算长度得到平均宽度,但这种方法不能求得裂缝的最大宽度;文献[11]采用最小距离法,人工确定裂缝的上下缘,计算上缘各点到下缘所有点的距离,得到每点的最大宽度与平均宽度,该方法自动化程度低且计算量较大;文献[12]通过内切圆直径近似计算裂缝各位置的宽度,该方法在裂缝较细时难以精确求得各位置的内切圆,同时在裂缝曲率较大的位置易造成较大误差。而且上述研究在病害的识别上主要还是依靠人工,同时无法实现裂缝病害的自动、定量测量,检测效率较低,并且上述研究的图像传输方案采用的是模拟信号传输或wifi传输,传输质量、距离及实时性难以满足工程要求,因此有必要研究适用于无人机的桥梁裂缝自动检测方案。
本文设计一种利用四旋翼无人机进行桥梁裂缝宽度自动测量的方案,包括无人机系统设计,摄像系统设计和数字图像处理方法。在无人机系统设计中,基于无人机型号与动力学模型搭建了旋翼无人机的硬件平台,能够满足稳定悬停、预定航线巡检、远程控制、安全冗余的要求;在摄像系统设计中,通过对摄像机矫正、像素物理尺寸标定、物距测量等步骤获取裂缝图像及辅助信息,并提出一种低成本的数字图像传输方式,满足关键图像的实时传输;在数字图像处理方法中,设计了一种裂缝宽度自动测量的算法,利用中值滤波、拉普拉斯滤波器对图像进行去噪,通过阈值划分、孤立点消除的方式获取完整的裂缝二值图像,通过改进的框选法实现裂缝宽度的测量。
1 无人机系统设计
1.1 无人机选型
小型民用无人机通常可分为固定翼、旋翼、扑翼及无人飞艇等类型[13]。固定翼无人机效率较高、续航能力强,适用于长巡航时间要求的场合,但是不能稳定悬停或小半径转弯;扑翼无人机是人们借鉴鸟类与昆虫飞行方式设计的仿生飞行器,目前研究尚处于起步阶段,在工程应用中较少;旋翼无人机可以稳定悬停,在较短的飞行时间内可以沿各方向自由飞行。
四旋翼无人机是旋翼无人机中最为常见的一种,相比于单、双旋翼,四旋翼具有更好的飞行控制性能,机动性能良好;相比于六旋翼、八旋翼,四旋翼具有更低的能耗,同等条件下续航能力更强。
1.2 四旋翼无人机动力学模型
动力学模型描述了飞行器系统的行为随时间的变化,将无人机视作刚体,则无人机的空间位置可以由包括平动与转动的6个参数精确描述,飞行器的空间状态示意如图1。
定义飞行器的空间坐标为:
Q=ξ,ηT=x,y,z,ψ,θ,φT
(1)
式中:ξ为飞行器相对于大地坐标系的空间位置;η为飞行器相对于大地坐标系的空间姿态;ψ,θ,φ分别为欧拉偏航角、欧拉俯仰角、欧拉滚转角。
由欧拉-拉格朗日方法建立四旋翼无人机的动力学模型,飞行上所受力与力矩如图2。则四旋翼无人机的动力学模型为:
(2)
式中:f为无人机上作用的竖向合力;τφ,τθ,τψ分别表示绕θ,φ,ψ的力矩。
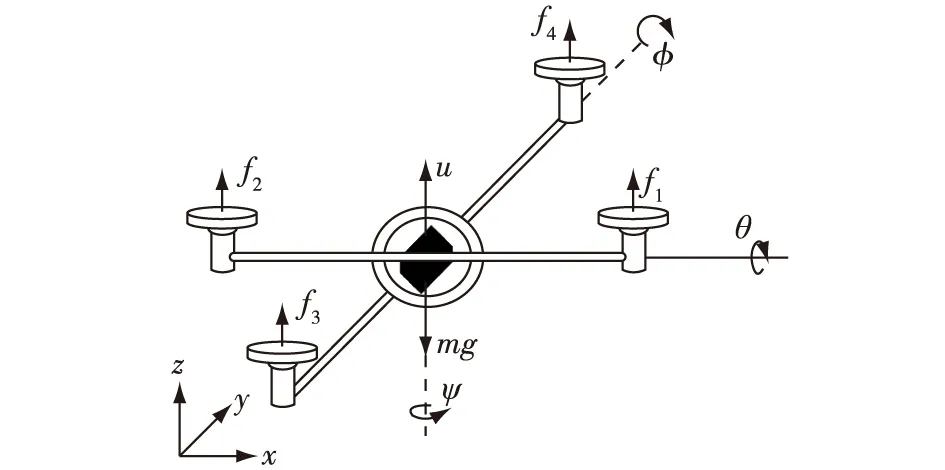
图1 四旋翼无人机空间状态Fig.1 Spatial state of quad-rotor UAV

图2 四旋翼无人机受力和力矩示意Fig.2 Force and moment acting on an quad-rotor UAV

图3 四旋翼无人机系统实物图(1为四旋翼无人机,2为地面站,3为遥控装置)Fig.3 Practicality picture of quad-rotor UAV system (1-quad-rotor UAV; 2-ground station; 3-remote control)
1.3 无人机系统硬件平台搭建
应用于桥梁检测的无人机系统在飞行动力、飞行控制、图像获取、飞行安全及信号稳定性方面需要满足一定要求。在飞行动力方面,需要具备大载重量、长时间续航的能力;在飞行控制方面,需要具备稳定悬停、姿态调整、视距外控制、路径规划、即时定位的能力;在图像获取方面,要具备成像稳定清晰、实时传输的能力;在飞行安全方面,需要具备避障、突发情况应急处理的能力[14];在信号稳定性方面,控制与图像传输信号需要在钢筋混凝土结构的屏蔽下正常工作。针对上述要求并考虑飞行器动力学特性,搭建了四旋翼无人机桥梁检测硬件平台,见图3和4。

图4 四旋翼无人机系统硬件组成Fig.4 Hardware design of quad-rotor UAV system
飞行动力:采用轴距为550 mm的碳纤维机架,配备14寸碳纤维桨、6S/20000 mAh锂电池,电机选用3508(KV380)型号,电子调速器选用40A型号,稳定载质量可达到5.8 kg,满足桥梁检测相关仪器的负载要求;满载情况下,飞行时间可达40 min。
飞行控制:以STM32F427作为主控板,采用ARM Cortex M4架构,利用MPU6050加速度计/陀螺仪、气压计等传感器,获取飞行器实时的三轴加速度及偏转角,通过式(2)可以实现无人机的稳定悬停与姿态调整。利用电子罗盘与GPS获取飞行器的实时空间位置,实现巡检路径的规划与实时定位。试验表明在环境条件相对稳定时,GPS的定位精度与信号稳定性可以满足要求。地面站使用CC2500模块向无人机发送指令,并通过5.8 GHz的图像传输设备获取摄像机的拍摄场景,监视飞行状态,完成视距外对无人机的控制。

图5 无人机检测结构裂缝Fig.5 Detection of cracks in structures using UAV
图像获取:采用鹰眼5S运动相机,摄像清晰度1 080 P,有效照相像素1 200万。相机悬挂于三轴增稳云台上,在飞机抖动时保持相机稳定,同时当相机轴线与目标不垂直时,利用云台三轴的舵机,调整相机x,y,z轴上的偏转角,调整相机的姿态。图像实时传输方案见2.4节。
飞行安全:以 STM32F103作为安全协处理器,设置冗余的16位微陀螺仪、14位微加速度计,并配有安全电源,以应对飞行突发情况。上述无人机系统对工程结构的实地测量如图5。
信号稳定性:对桥梁跨中底部等相对封闭混凝土构筑物进行检测时,可能存在无人机远程控制信号受阻隔的问题,目前国内外对此尚无明确可靠的理论分析,且实际的信号传输效果受场地影响较大。文献[15-16]研究了电磁波在钢筋混凝土结构中传播的衰减规律,表明钢筋混凝土结构对高频信号的耦合度较高,频率较高的信号可以绕过周期性钢筋的局部不均匀区域进行传播,且更不易落入频率截止区,因此高频信号在钢筋混凝土中的传播相对容易。考虑到检测区域均非绝对封闭,且混凝土厚度的增加对信号的衰减影响较小,设计的无人机系统的控制频率(2.4 G),图像传输频率(5.8 G)可以满足桥梁和其他大体积混凝土构筑物检测的一般需求。现场试验表明,设计的无人机系统对箱型拱桥进行检测时,控制信号无明显延迟,图像传输画面稳定、清晰。对于建筑高度较大的桥梁,可以考虑设置信号中继站进行无线信号的增益。
2 摄像系统设计
无人机桥梁检测系统需要同时满足精确度与效率的要求。桥梁检测的精确度要求较高,因此获取的图像必须经过矫正,以消除相机本身的拍摄误差。检测效率依赖于检测系统的自动化程度,为实现通过图像对裂缝进行自动测量,需要获得每幅图像的像素物理尺寸,同时为了及时获得检测信息,检测系统应当具备关键图像的实时传输能力。基于以上要求,设计如下的摄像系统。
2.1 相机畸变矫正
图像的畸变是由于摄像系统的成像与实际物体的空间关系不能严格满足中心投影模型,相机的镜头畸变可分为径向畸变与切向畸变。径向畸变由透镜的形状引起,即透镜表面的径向曲率变化不均匀,导致光线在远离透镜中心的地方比靠近透镜中心的地方更弯曲,常见的径向畸变有筒形畸变、枕形畸变。切向畸变由相机的安装引起,即安装缺陷导致的透镜主轴与图像平面不平行[17]。
无人机机载相机通常使用广角镜头,因此获得的图像往往枕形畸变严重(图6(a)),矫正采用棋盘格标定法,利用Matlab的Camera Calibrator工具箱进行矫正,矫正的原始图像为不同角度拍摄的11张棋盘格图像(图7),矫正平均误差为1.28 pixel。经过径向、切向矫正后的图像见图6(b)。

图6 图像畸变矫正Fig.6 Image distortion correction
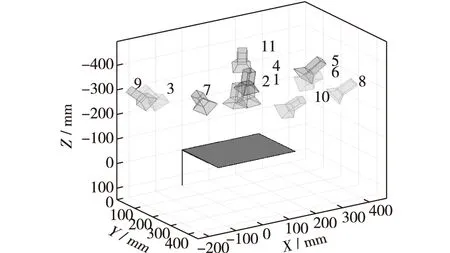
图7 矫正后计算所得的多角度拍摄相机位置Fig.7 Multiplane calibration camera locations after corrected by calculating
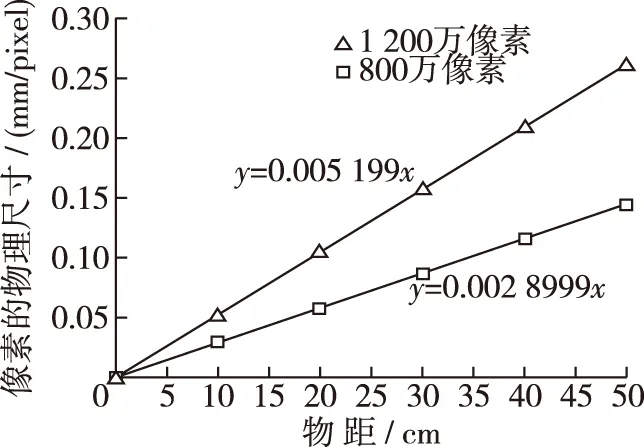
图8 像素物理尺寸-物距拟合曲线Fig.8 Fitting curves of physical size of pixel-object distance
2.2 像素物理尺寸标定
为了实现裂缝宽度的数字图像测量,需要获取图像的像素物理尺寸(mm·pixel-1),采用平行线测量的方法,具体为:用矫正好的相机对间距为10,20,30,40,50 mm的标准平行线进行拍摄,保证相机主轴与平行线标定板垂直,调节拍摄距离从100 mm变化至500 mm,步长为100 mm;对拍摄得到的图像进行处理,分别获取同一物距下不同间距平行线的像素物理尺寸,并做算术平均,拟合得到像素物理尺寸关于物距的函数曲线。本文采用HuaWei CMOS相机(2 336×4 160)与鹰眼5S相机(3 024×4 032)分别经过上述处理流程,拟合得像素物理尺寸关于物距的函数曲线,如图8。
2.3 物距测量
利用像素物理尺寸-物距曲线获得各图像的像素物理尺寸时,需要已知物距,因此在拍摄图像的同时需要获取相机到物体的距离,采用超声波测距方式,设计了主板及从板。从板置于相机正下方,主板放置在地面站,主板与从板间通过nrf24l01模块进行无线通信,有效通信距离达2 000 m。超声波测距装置与图像传输装置通过SPI协议进行通信,保证物距测量与下文的图像传输同时进行,在接收图像的同时获取对应的物距信息。
桥梁检测通常需要实时反馈信息,以便检测人员及时作出调整,因此需做到地面站与飞行器同步获取检测信息,传统的5.8 G图像传输方式,可以做到地面站实时接收机载相机画面,但由于这种传输方式采用模拟信号传输,对图像进行了压缩,使得地面站接收到的图像失真严重,而高清数字图传COFDM成本较高且分辨率受限。
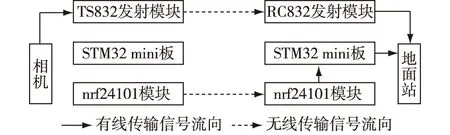
图9 图像传输系统结构Fig.9 Structure diagram of image transmission system
针对以上图像传输方式的不足,设计了针对无人机桥梁视觉检测的图像传输系统,将模拟图像传输流畅、实时性好、成本低廉的优势,与数字图像传输信号失真小的特点相结合,具体为:在飞行观测部分,仍采用5.8 G模拟图像传输,选用TS832+RC832模块,有效传输距离1 500 m,用于飞行概况的整体规划;对于裂缝图像等需要进行数字图像处理的关键图像,采用2.4 G数字信号传输,选用AS01-ML01DP5模块,模块芯片为nrf24l01,有效传输距离2 000 m,空中最大传输速率为2 M/s,对于1 200万像素相机的图像可在1~2 s完成传输,模块与相机之间通过STM32 mini板连接,mini板MCU为STM32F407ZGT6,mini板配有64 Mb Flash及16 G SD卡,可以缓存多张图像。图像传输系统见图9。

图10 摄像系统采集得到的裂缝图像Fig.10 Images acquired by camera system
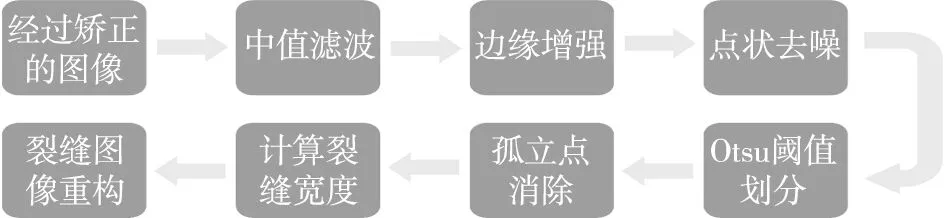
图11 数字图像处理流程Fig.11 Process for digital image processing
2.4 工程实践
利用上述摄像系统对江苏省盐城市亭湖区新跃进桥的裂缝进行了实地图像采集,相机为鹰眼5S(配广角镜头),图像的原始尺寸均为3 024×4 032,拍摄图像104张,总计227 MByte。摄像系统的地面站设置在距离桥梁120 m的高地,图像远程传输最大距离为150 m,平均传输速率为1.91 M/s。矫正后图像见图10。
3 数字图像处理方法
规范[18]对于桥梁裂缝宽度有明确要求:梁体不允许产生竖向裂缝,纵向裂缝最大允许宽度为0.2 mm。传统的无人机裂缝检测系统中,对于采集到的裂缝图像,由检测人员进行人工甄别,确定结构的病害,这种方式处理效率低下、主观性大,且对于裂缝损伤,精度难以达到要求。
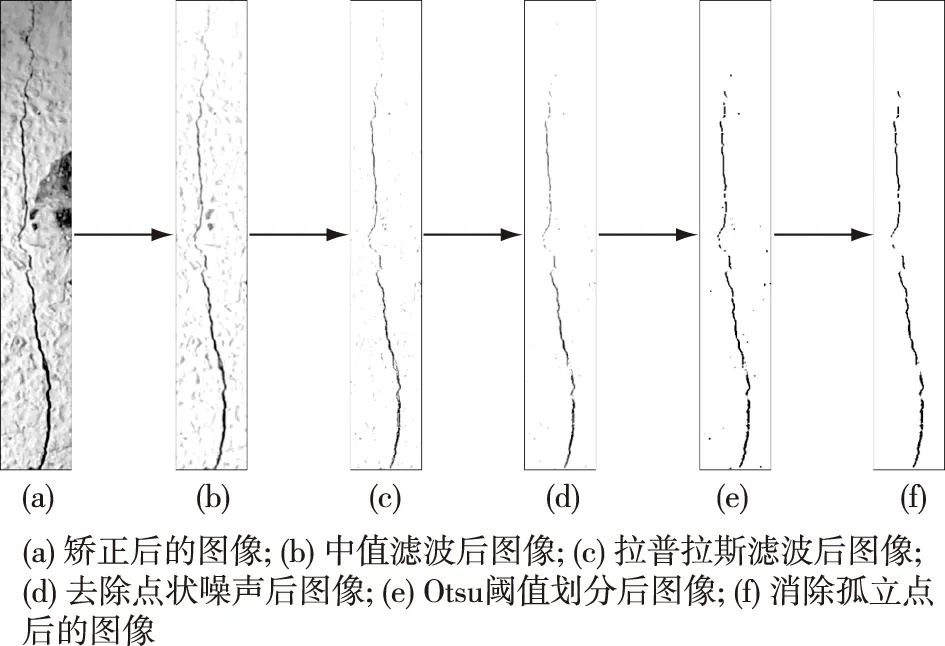
图12 图像数字处理结果Fig.12 Image digital processing
针对桥梁裂缝的复杂噪声(水渍、阴影等),设计了一种适用于无人机采集的裂缝图像的处理算法:首先通过模板较大的中值滤波器去除图像的大面积噪声,随后通过拉普拉斯滤波器对裂缝的边缘进行增强,并抑制背景噪声,再通过模板较小的中值滤波器去除点状噪声,接着通过最大类间方差法(Otsu)[19]对图像进行阈值分割,分割后的图像再通过连通域的几何特征消除孤立区域,最后结合上一章节的像素物理尺寸信息,计算得到裂缝的实际宽度。图像处理流程见图11,各步骤处理结果见图12。
3.1 中值滤波
混凝土桥梁的材料特性及服役环境导致其表面裂缝图像通常包含复杂噪声。混凝土本身的微裂缝会影响裂缝识别与测量精度;桥面裂缝的尘土填塞物会模糊裂缝与背景的界限,影响裂缝的识别,而路面指示标识、伸缩缝在图像中均属于线性结构,不进行处理可能导致分割失败;腹拱、拱圈、桥墩部分的裂缝往往会有渗水[20],水渍本身颜色与裂缝接近且分布范围较大,直接分割会使得裂缝宽度大于真实值;拍摄的光照条件不理想带来的光斑与阴影会使得裂缝的重构不完整。因此,桥梁裂缝的图像在进一步处理前应当进行去噪处理。

图13 中值滤波处理过程Fig.13 Median filter processing
Fujita等[21]研究发现,中值滤波对于去除混凝土裂缝的背景噪声效果良好,尤其对于光照不均引起的阴影、光斑,渗水部分的水渍等噪声效果显著。中值滤波器的滤波效果与滤波器的模板大小有关,模板越大则滤波图像越模糊,背景减除后面积较大的块状噪声将被去除,模板越小则滤波图像与原图像越接近,背景减除后面积较小的点状噪声将被去除。中值滤波处理过程见图13。

图14 拉普拉斯滤波器Fig.14 Laplacian filter
3.2 边缘增强
经过较大模板的中值滤波器滤波后,图像上将会存在大量噪点,分布在裂缝周边的噪点使得裂缝边缘不够清晰,因此需要对噪点进行抑制,同时增强边缘。高通滤波器可以达到边缘提取与强化的效果,通过拉普拉斯算子构造了高通滤波器(见图14)[22],对图像滤波并归一化处理后,保留直方图前一部分的像素(取前5%)以达到边缘提取、噪声抑制的作用。
3.3 孤立点消除
经过阈值分割的裂缝图像,通常存在孤立的噪点,通过分析二值图像连通域的几何特征,对孤立的噪点或噪块进行消除,具体方法为:计算每一个连通区域Li的面积Ai、最小外接圆半径Ri、最小外接矩形的长a和宽b,设定孤立点的判断标准为:连通域的最小面积限制,Ai≤Alim;连通域的线性度限制[23],定义连通域的线性度LE=ab/(πR2)≤LElim。
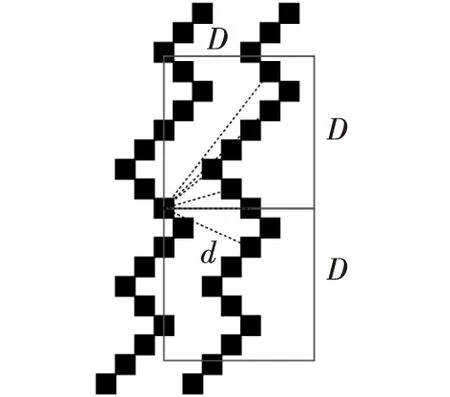
图15 裂缝宽度计算Fig.15 Calculation of crack width
3.4 裂缝宽度计算
经过阈值划分、裂缝生长后,得到了完整的二值化裂缝图像,以纵向发展的单裂缝图像为例,介绍所设计的计算裂缝宽度的方法,具体方法为:

3.5 综合应用
为验证提出的图像处理方法对混凝土结构裂缝的有效性与精度,对江苏省盐城市境内的多处混凝土结构工程的裂缝进行图像采集,包括梁桥(大庆桥),拱桥(新跃进桥),斜拉桥(迎宾桥),海堤护坡(滨海县),泵站进水池护坡、翼墙、挡土墙、防洪闸(北坍翻水站)等。对采集到的图像进行处理,结果与Otsu方法进行对比(见图16),不同方法得到的裂缝宽度测量结果见表1。
通过对比发现,当裂缝与背景的灰度值差异较大且背景噪声较小时,Otsu方法与本文算法的精度相近;但当裂缝与背景的灰度接近,或者背景本身的纹理复杂时,Otsu方法的分割效果无法满足测量要求,但是该算法仍然表现出良好的鲁棒性。该算法在提取裂缝时,可能会遗漏部分细微的裂缝,但是针对桥梁混凝土结构的裂缝检测要求,本文算法的检测精度可以满足工程需要。
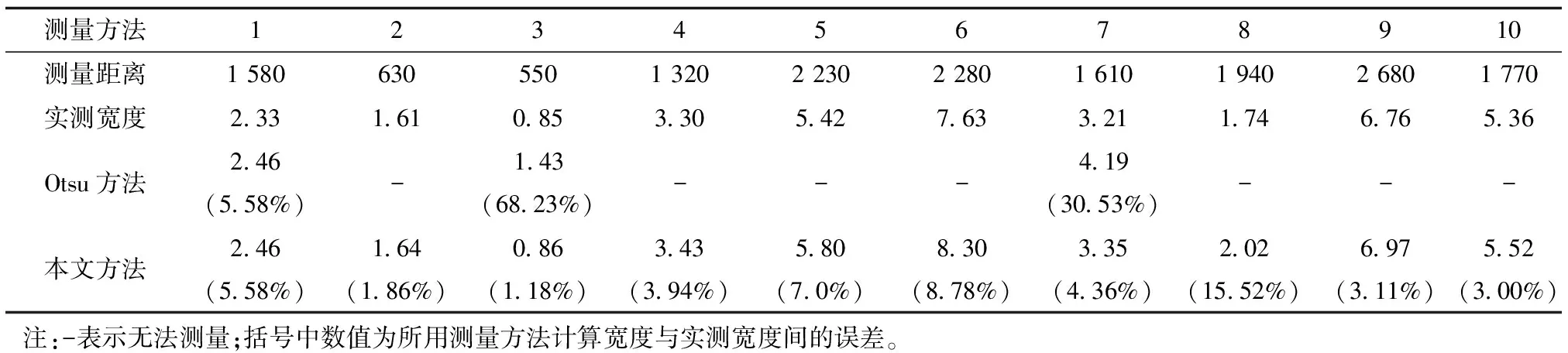
表1 不同方法测量的裂缝最大宽度比较Tab.1 Comparison of crack width measurement mm

图16 不同图片处理方法得到的混凝土裂缝Fig.16 Concrete cracks obtained by different image processing methods
4 结 语
设计了基于四旋翼无人机的桥梁裂缝半自动检测系统,从无人机平台和摄像系统的设计及数字图像处理等方面介绍了无人机桥梁检测的实现方法与原理。
在无人机平台设计中,针对桥梁检测需求进行了无人机选型;针对检测系统的动力、控制、安全要求,结合旋翼无人机的动力特性,设计了四旋翼无人机的硬件平台。在摄像系统设计中,通过相机的矫正提高测量的精度,借助像素物理尺寸标定、物距测量获取裂缝图像自动测量的辅助信息,设计了一种图像无线传输方案,提高了裂缝检测的效率。在数字图像处理中,针对桥梁裂缝的成像特点与检测要求,提出了一种基于中值滤波、边缘增强、形态学处理的桥梁裂缝图像处理方法。初步测试表明,该系统可以进行悬停检测、定点巡检、裂缝宽度自动测量,算法的鲁棒性良好。
[1] ELLENBERG A, BRANCO L, KRICK A, et al. Use of unmanned aerial vehicle for quantitative infrastructure evaluation[J]. Journal of Infrastructure Systems, 2015, 21(3): 04014054.
[2] LIU P, CHEN A Y, HUANG Y N, et al. A review of rotorcraft unmanned aerial vehicle (UAV) developments and applications in civil engineering[J]. Smart Structures & Systems, 2014, 13(6): 1065- 1094.
[3] METNI N, Hamel T. A UAV for bridge inspection: Visual servoing control law with orientation limits[J]. Automation in Construction, 2007, 17(1): 3- 10.
[4] SAYFEDDINE D, BULGAKOV A, EMELIANOV S, et al. Inspection of flyover bridges using quadrotor[C]∥International Symposium on Automation and Robotics in Construction and Mining, 2015.
[5] HALLERMANN N, MORGENTHAL G. The application of unmanned aerial vehicles for the inspection of structures[C]∥PLSE-First International Conference on Performance-based and Life-cycle Structural Engineering, 2012.
[6] HALLERMANN N, MORGENTHAL G. Visual inspection strategies for large bridges using unmanned aerial vehicles (UAV)[C]∥7th International Conference on Bridge Maintenance, Safety and Management, IABMAS, 2014.
[7] AVENDANO J, OTERO L D, COSENTINO P. Towards the development of a complex structural inspection system using small-scale aerial vehicles and image processing[C]∥Systems Conference. IEEE, 2013: 420- 425.
[8] MAGSINO E R, CHUA J R B, CHUA L S, et al. A rapid screening algorithm using a quadrotor for crack detection on bridges[C]∥Region 10 Conference (TENCON)—Proceedings of the International Conference. IEEE, 2016: 1829- 1833.
[9] WEFELSCHEID C, HNSCH R, HELLWICH O. Three-Dimensional building reconstruction using images obtained by unmanned aerial vehicles[J]. ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2012, XXXVIII-1/C22(1).
[10] 叶贵如, 周青松, 林晓威. 基于数字图像处理的表面裂缝宽度测量[J]. 公路交通科技, 2010, 27(2): 75- 78. (YE Guiru, ZHOU Qingsong, LIN Xiaowei. Measurement of surface crack width based on digital image processing[J]. Journal of Highway and Transportation Research and Development, 2010, 27(2): 75- 78. (in Chinese))
[11] 刘学增,叶康. 隧道衬砌裂缝的远距离图像测量技术[J]. 同济大学学报(自然科学版), 2012, 40(6): 829- 836. (LIU Xuezeng, YE Kang. A long-distance image measuring technique for crack on tunnel lining[J]. Journal of Tongji University(Nature Science), 2012, 40(6): 829- 836. (in Chinese))
[12] 裴耀东, 刘志文. 基于数字图像处理的混凝土裂缝宽度检测[C]∥第25届全国结构工程学术会议论文集, 2016. (PEI Yaodong, LIU Zhiwen. Detection of Concrete Crack Width based on Digital Image Processing[C]∥25thProceedings of the National Conference on Structural Engineering, 2016. (in Chinese))
[13] 洛扎诺, 陈自力, 蔚建斌, 等. 无人机: 嵌入式控制[M]. 北京: 国防工业出版社, 2014. (LOZANO R, CHEN Zili, WEI Jianbin, et al. Unmanned aerial vehicles embedded control[M]. Beijing: National Defence Industry Press, 2014. (in Chinese))
[14] 亚力克斯·埃利奥特. 无人机玩家DIY指南[M]. 北京: 人民邮电出版社, 2016. (ELLIOTT A. Build your own drone manual[M]. Beijing: Posts and Telecommunications Press, 2016. (in Chinese))
[15] 刘韬. 电磁波在钢筋混凝土墙中传输特性的有限元分析[D]. 西安: 西安电子科技大学, 2010. (LIU Tao. Research on the propagation properties of electromagnetic waves in reinforced concrete wall with finite element method[D]. Xi’an: Xidian University, 2010. (in Chinese))
[16] 杨明珊, 孟小超, 邱志勇, 等. 基于FDTD 的钢筋混凝土墙对通信信号衰减研究[J]. 郑州大学学报(工学版), 2014, 35(3): 60- 64. (YANG Mingshan, MENG Xiaochao, QIU Zhiyong, et al. Study on attenuation of reinforced concrete walls on communication signals based on FDTD[J]. Journal of Zhengzhou University (Engineering Science) , 2014, 35(3): 60- 64. (in Chinese))
[17] 布拉德斯基, 克勒. 学习OpenCV(中文版)[M]. 于仕琪, 刘瑞祯, 译. 北京: 清华大学出版社, 2009. (BRADSKI G, KAEHLER A. Learning OpenCV[M]. Translated by YU Shiqi, LIU Ruizhen. Beijing: Tsinghua University Press, 2009. (in Chinese))
[18] JTG H11—2004 公路桥涵养护规范[S]. 北京: 人民交通出版社, 2004. (JTG H11—2004 Code for maintenance of highway bridges and culvers[S]. Beijing: China Communication Press, 2004. (in Chinese))
[19] OTSU N. A threshold selection method from gray level histograms[J]. IEEE Transactions on Systems Man & Cybernetics, 1979, 9(1): 62- 66.
[20] 叶文亚, 刘仲训, 李国平. 混凝土桥梁常见病害与裂缝形态[C]∥中国交通土建工程学术研讨会. 2006.(YE Wenya, LIU Zhongxun, LI Guoping. Common diseases and cracks fracture morphology of concrete bridges[C]∥China Transportation and Civil Engineering Symposium, 2006. (in Chinese)))
[21] FUJITA Y, HAMAMOTO Y. A robust automatic crack detection method from noisy concrete surfaces[J]. Machine Vision and Applications, 2011, 22(2): 245- 254.
[22] GONZALEZ R C, WOODS R E, EDDINS S L. 数字图像处理的MATLAB实现[M]. 2版. 阮秋琦, 译. 北京: 清华大学出版社, 2013. (GONZALEZ R C, WOODS R E, EDDINS S L. Digital image processing using MATLAB[M]. 2nd ed. Translated by RUAN Qiuqi. Beijing: Tsinghua University Press, 2013. (in Chinese))
[23] 张德津, 李清泉, 陈颖, 等. 基于空间聚集特征的沥青路面裂缝检测方法[J]. 自动化学报, 2016, 42(3): 443- 454. (ZHANG Dejin, LI Qingquan, CHEN Ying, et al. Asphalt pavement crack detection based on spatial clustering feature[J]. Acta Automatica Sinica, 2016, 42(3): 443- 454. (in Chinese))